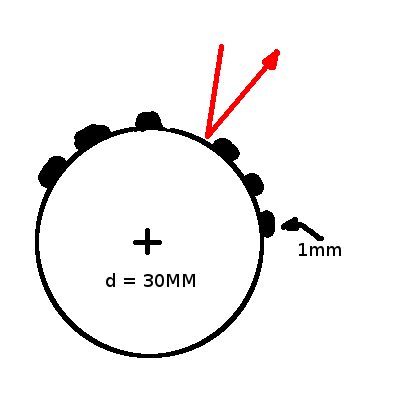
Hallo Forum, zwecks Automation, würden wir gerne eine Keilwelle ausrichten. Der Durchmesser beträgt etwa 30mm die Verzahnung ist etwa 1mm hoch. Die Welle ist symetrisch, ausser an einer Stelle, dort fehlt ein "Zahn". Die Welle kann mit einem Schrittmotor beliebig gedreht werden (1.8 Grad / Schritt). Mein bester Ansatz bisher: Mit einem Laser Abstandssensor während der Drehung die "Lücke" erfassen und dann mit Einzelschritten an den nächsten "Zahn" fahren. Vor mechanischen Lösungen habe ich respekt weil, tausende relativ scharfkantige Wellen ausgerichtet werden müssen. Schliesse ich aber natürlich nicht aus. Vielleicht hat jemand noch eine gute Lösung? Vielen Dank im Voraus. Martin
Angehängte Dateien:
-

ausrichten.png
3 KB
Martin H. schrieb: > zwecks Automation, würden wir gerne eine Keilwelle ausrichten. Was meinst du denn mit "ausrichten"? Wellen werden ausgerichtet damit ihre Drehachse parallel zu anderen Bauteilen verläuft oder zu Anschlussteilen fluchtet. Oder willst du hier die Welle in eine bestimmte Winkelposition verdrehen? Welche Genauigkeit soll das haben?
Ich wette: Genervter schrieb: > - Wie genau soll's sein? Hinreichend genau. > - Wie schnell soll's gehen? Hinreichend schnell.
Wie im Auto mit einem induktiven Sensor an der Kurbelwelle und Nockenwelle. Dort wird auch das Fehlen eines Zahns als Nullmarke genommen und von dort ab gezählt. Mit einem passenden Induktiven Geber sollten Abstände bis 7 oder 8mm überhaupt kein Problem sein.
Die Welle wird vermutlich irgendwo gelagert sein? Kannst Du nicht einfach dort z.B. eine Scheibe mit Loch anbringen? Oder ist die Welle ein zu bearbeitendes Werkstück das jedes Mal neu gespannt wird? Wie genau muss die Position nachher sein?
Hier noch ein paar mehr Infos: > - Was meinst du denn mit "ausrichten"? Die Welle soll in der Drehrichtung definiert sein. > - Wie genau soll's sein? Ich denke die 1.8 Grad vom Schrittmotor sind etwa das Ziel. > - Wie schnell soll's gehen? Während des Ausrichtens steht der Prozess still daher so schnell wie möglch, Hausnummer 5 Sekunden sind ok. > - Induktiven Geber Das ist interessant, könnte induktiv besser sein als optisch? Ich dachte bei dieser Geometrie (1mm) wäre optisch besser, habe aber keine Erfahrung. > - Die Welle wird vermutlich irgendwo gelagert sein? Richtig, es sind hunderte, rollend in einem Magazin. Ich habe versucht sie "definiert" zu lagern, aber durch die Form verklemmt es dann einfach zu leicht. > - Oder ist die Welle ein zu bearbeitendes Werkstück das jedes Mal neu gespannt wird? Jede Welle wird neu gespannt. > - Wie genau muss die Position nachher sein? Eigentlich egal, danach wir die Welle wieder "undefiniert" in der Drehrichtung, auf eine Schiene gelegt. Freundliche Grüsse Martin
Martin H. schrieb: > Mein bester Ansatz bisher: Mit einem Laser Abstandssensor während der > Drehung die "Lücke" erfassen und dann mit Einzelschritten an den > nächsten "Zahn" fahren. Ein Laser ist erst mal nur ein monochromer Lichtstrahl der nicht merkt worauf er trifft. Da einen passend genauen Sensor zu finden, dürfte nicht leicht sein, weil das auch von der Reflektion/Absorbtion des Prüflings abhängt. Wäre da nicht ein HAL-Sensor geeigneter? Martin H. schrieb: >> - Was meinst du denn mit "ausrichten"? > Die Welle soll in der Drehrichtung definiert sein. Wenn man die Lücke hat, kann man ja so lange Drehen bis die Lücke gefunden wird. >> - Wie genau soll's sein? > Ich denke die 1.8 Grad vom Schrittmotor sind etwa das Ziel. Dazu sollte man wohl die Anzahl der Keilnuten in einem Ganzzahligen Verhältnis mit den Stepwinkel setzen können, sonst entstehen wohlmöglich Fehler. >> - Wie schnell soll's gehen? > Während des Ausrichtens steht der Prozess still daher so schnell wie > möglch, Hausnummer 5 Sekunden sind ok. Auch dafür bräuchte man die Anzahl der Keilnuten. Die Höhe reicht net. >> - Induktiven Geber > Das ist interessant, könnte induktiv besser sein als optisch? Ich dachte > bei dieser Geometrie (1mm) wäre optisch besser, habe aber keine > Erfahrung. Induktiv sind von der Genauigkeit stark abhängig von den Dimensionen der Messvorrichtungen. Ich glaube nicht, das das so genau geht. >> - Die Welle wird vermutlich irgendwo gelagert sein? > Richtig, es sind hunderte, rollend in einem Magazin. Ich habe versucht > sie "definiert" zu lagern, aber durch die Form verklemmt es dann einfach > zu leicht. Das ist abhängig von der Magazingeometrie und der Technik wie Einzelstücke ausgegeben werden. Hier gibts einige Technologien die man als Lösung heranziehen kann, aber so einfach nach Skizze kann man da schlecht etwas synthetisieren. >> - Oder ist die Welle ein zu bearbeitendes Werkstück das jedes Mal neu > gespannt wird? > Jede Welle wird neu gespannt. Und hier soll die automatische Ausrichtung vollzogen werden? Kann man keine mechanische Zange kontruieren die in die Lücke einrastet, quasi wie ein Nockenschalter? >> - Wie genau muss die Position nachher sein? > Eigentlich egal, danach wir die Welle wieder "undefiniert" in der > Drehrichtung, auf eine Schiene gelegt. Ich glaube nicht, dass das die Frage beantwortet. Vermutlich ist das ganze eine maschinelle Weiterverarbeitung die etwas vereinfacht/genauer werden soll? Wie wurde das bisher gemacht? Mit einer Messuhr, Kantentaster? Wenn man hier ein paar Bilder hätte, könnte man zielgerichteter Ideen dazu beitragen. In dem Fall müsste auch geklärt werden, wie man an einer Werkzeugmaschine da die Steuerung beeinflussen kann/darf. Schrittmotore sind da auch nicht Stand der Technik. Ich finde, das Problem muss mehr Visualisiert werden, bevor man sich da einer Lösung nähert.
Dr.Who schrieb: > Wäre da nicht ein HAL-Sensor geeigneter? Du meinst Hall-Sensor, oder? Nach Edwin Hall. Das ist keine Abkürzung.
Martin H. schrieb: >> - Was meinst du denn mit "ausrichten"? > Die Welle soll in der Drehrichtung definiert sein. Habe den Eindruck, daß Du nicht weißt, was man unter Ausrichten versteht. :) Keilwellen werden zwischen Spitzen angefertigt. Incl. ihrer beidseitigen Lagersitz-Zapfen. Bei/an denen brauchst Du nichts mehr auszurichten, weil sie je nach Genauigkeit der Anfertigung entspr. genau sind. Die Drehrichtung hat mit der Ausrichtung einer Keilwelle nichts zu tun. Sie wird ihr von einem Antriebsmotor "aufgedrückt". Wie auch immer gewünscht. > >> - Wie genau soll's sein? > Ich denke die 1.8 Grad vom Schrittmotor sind etwa das Ziel. Egal, wie genau Du den Drehwinkel einer Keilwelle haben willst: Ist nur eine Frage der Auflösungsmöglichkeit der Drehung. > >> - Wie schnell soll's gehen? > Während des Ausrichtens steht der Prozess still daher so schnell wie > möglch, Hausnummer 5 Sekunden sind ok. Welcher Prozess steht still und warum? Geht es um Produktion von Keilwellen und Stichproben-Entnahmen oder was? Und was genau willst Du denn an den Keilwellen - womit auch immer - messen und wozu? So lange Du nicht mit konkreteren Infos rüberkommst, hat es gar keinen Sinn, darüber nachzudenken, wie man Dir evtl. behilflich sein kann. :) Grüße
Hallo, noch ein kurzes Feedback meinerseits, ich nutze jetzt den: Baumer OADM 12U6460/S35A Distanz-Sensor (Der lag hier noch rum) zusammen mit einem Microstep fähigen Schrittmotortreiber kann ich die Welle jetzt in etwa 200ms (worst case) auf theoretisch 0.056 Grad genau positionieren. Der Sensor hat keine Probleme mit der reflektierenden Oberfläche Stahl. Ich bin sehr zufrieden mit dieser Lösung. Freundliche Grüsse Martin
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.