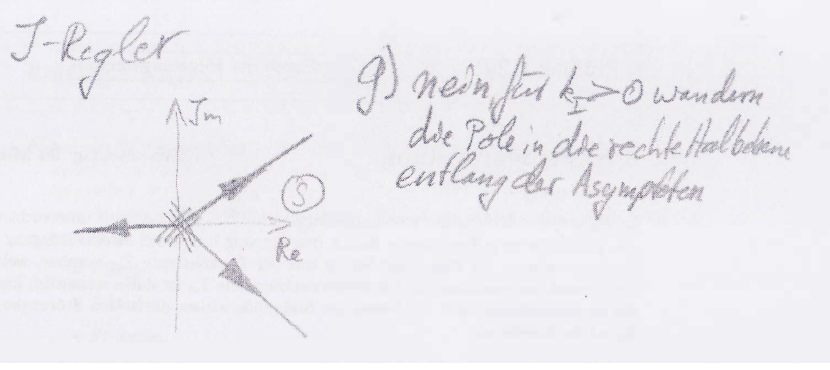
Hi Gegeben sei die Strecke G_Strecke(s)=1/s^2 und allgemein ein I Regler.Die WOK ist im Anhang vorhanden. Mich würde jetzt interessieren wieso für kein K>0 das System stabilisierbar ist? Wieso laufen die Pole in die rechte Halbebene mit zunehmender Verstärkung anstatt in die linke Halbebene? Ich meine es gibt ja auch Äste die sich vom Ursprung aus in die linke Halbebene bewegen. Wäre das nur mit einer negativen Verstärkung möglich oder wo liegt mein Denkfehler?
Angehängte Dateien:
-

wok.png
180 KB
Gleichung f. die Pole ist: s^3 + K = 0 Wo liegen dann die Pole?
Aber wie ich nun auf den oben genannten Zusammenhang komme weiß ich leider immer noch nicht.
Strecke:
Regler:
Open Loop:
Closed Loop:
Nullstellen:
Polstellen:
Dein System wäre also stabil für K=0. Dann wäre die Übertragungsfunktion des "geregelten" Systems gleich eins. Das Problem dabei ist, dass dein System dann nicht geregelt wird. Durch K=0 bleibt der Systemeingang Null. Durch die doppelte Polstelle bei Null ist die Strecke grenzstabil. Ohne Einwirkung passiert auch nichts (vorausgesetzt sämtliche Anfangsbedinungen und Störgrößen sind auch Null, also nur im Idealfall). Ein negatives K würde nichts bringen, da das negative Vorzeichen in dem Fall die Polstellen einfach entlang der Imaginärachse spiegelt => eine Polstelle ist immer in der RHE.
Also wie die drei Lösungen Folgen ist mir klar. Es wird ja die dritte Wurzel einer komplexen Zahl gezogen. Aber woran kann man dann allgemein sehen in welche richtung sich man bewegt mit zunehmender verstärkungß Also jetzt für den algemeinen fall für beliebige aufgaben.
Habe die Lösung über mir übersehen vor meiner letzten Nachricht. Werde das jetzt mal zunächst versuchen nachzuvollziehen.
helpsignaldsp schrieb: > die liegen bei s=(-K)^(1/3) Fuer diesen Fall kann man das noch einfach sehen: Fuer positive K: s=(-K)^(1/3) s hat eine reelle und zwei konj. komplexe Loesungen. Multiplikation komplexer Zahlen bedeutet Multiplikation der Betraege und Addition der Winkel. D.h. eine Loesung s drei mal multipliziert ergibt -K ( s*s*s=-K). Der Betrag von s ist |K|^(1/3) der Winkel von s ist 180°, +60°, -60°. Bitte in der komplexen Ebene nachvollziehen. Fuer negative K entsprechend: s = K^(1/3) Betrag |K|^(1/3), Winkel 0°, 120°, -120° helpsignaldsp schrieb: > Also jetzt für den algemeinen fall für beliebige aufgaben. Allgemeine Loesungen gibt es nicht (afaik). Aber im Vorcomputerzeitalter wurden eine Reihe Gesetze/Regeln entwickelt. Das braucht man heutezutage natuerlich immer weniger. Siehe z.B. https://en.wikipedia.org/wiki/Root_locus Lunze, "Regelungstechnik 1" Gut finde ich DiStefano, "Feedback and Control Systems", Schaum's outlines. Gibt's vielleicht auch irgendwo als pdf.
hmm man muss doch anhand der WOK Regeln erkennen, das man sich vom Ursprung aus mit zunehmdener Verstärkung nur auf den Ästen der Rechten Halbebene (Instabil) bewegen kann und nicht auf dem Ast der auf der positiven Realachse liegt (stabil). Das obengenannte habe ich alles nachvollziehen können, aber die argumentation nur mithilfe der WOK das habe ich noch nicht verstanden. Denn immerhin müsste man von der WOK auf die Stabilität des geschlossenen Regelkreises schließen, ohne z.b. K=0 in G_geschlossen(s) einzusetzen. Denn das wäre ja auch ohne der Wurzekortskurve möglich.
Also ich hab es jetzt so verstanden. Es geht um die WOK deshalb ist es nur erlaubt mithilfe der WOK zu argumentieren Im Ursprung sind ja drei Pole vorhanden, wobei die WOK für k=0 in den Polstellen startet. Wenn ich nun k=0 wählen würde, befänden sich all drei Pole im ursprung. Das ist grenzstabil, aber nicht stabil. Mit zunehmenden k, kann ich diese Polstellen entlang der Äste bewegen. Wir haben drei Äste, da wir drei Polstellen haben. Enden tun diese Polstellen bei der Bewegung in den Nullstellen oder aber im unendlichen. Wenn ich nun k erhöhe sieht man das nur ein Polstelle stets stabil bleibt und die anderen zwei sich immer in der Linken Halbebene befinden. Dadurch ist allgemein das System nicht stabilisierbar. Also was ich nicht verstanden hatte war, dass ein Pol zu einem Ast gehört. Dachte irgendwie das man alle Pole auf dem ein und selben Ast bewegt.
Korrektur: Wenn ich nun k erhöhe sieht man das nur ein Polstelle stets stabil bleibt und die anderen zwei sich immer in der RECHTEN Halbebene befinden.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.