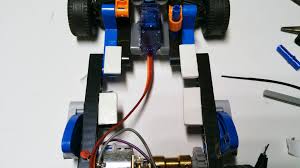
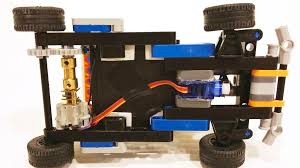




hallo und guten Abend community, für ein ferngesteuertes Auto habe ich mehrere Motoren eingeplant, die ich brauche. Ich setzte das mit einem ESP8266 um. Bei Pollin habe ich jetzt interessanterweise schon ein paar gefunden; für die Lenkung hab ich folgenden Motor herausgesucht: - Schrittmotor-Set DAYPOWER S-SPSM-5V ich brauch hier einen Adapter - einen Hub - wie würdest Ihr das machen!? Den Motor nebst Treiberstufe find ich super -aber ich muss das irgendwie adaptieren.. Er / bzw. seine Welle ist an beiden Seiten abgeflacht: Schrittmotor-Set DAYPOWER S-SPSM-5V https://www.pollin.de/p/schrittmotor-set...-5v-310543 Treiber-Board mit IC ULN2003A Betriebsspannung: 5 V- Status-LEDs: 4 Maße (LxB): 41x21,5 mm Technische Daten: Motor 28BYJ-48 Betriebsspannung: 5 V Phasen: 4 Schrittwinkel: 5,625° (64 Schritte/Umdrehung) Gleichstromwiderstand : 50 Ω Drehmoment: > 34,3 mNm Getriebeübersetzung: 1/64 Motor-Ø: 28 mm Welle: Ø 5mm, beidseitig abgeflacht Befestigungsloch-Abstand: 35 mm Einen weiteren Motor - diesen hier - den kann ich auch für die Lenkung verwenden Schrittmotor NANOTEC SP2018M0404-A https://www.pollin.de/p/schrittmotor-set-daypower-s-spsm-5v-310543 Kleiner, 2-Phasen bipolar Stepper-Motor mit 18° Schrittwinkel und 3 V- Betriebsspannung. Technische Daten: Betriebsspannung: 3 V- Betriebsstrom: 430 mA Strangwiderstand: 7 Ω Schrittwinkel: 18° Haltekraft: 60 g.cm Welle (ØxL): 1,5x9 mm Motor-Ø: 20 mm Gesamtmaße (LxBxH): 31x20x28,5 mm https://www.pollin.de/p/kunststoff-rundstab-4-mm-5-stueck-820449 Was meint ihr denn zu diesen Überlegungen - un dem oben genannten Motor bei dem ich die mechanische Anpassung noch herstellen muss!? Für die Lenkung denke ich ist ein Servo besser. Das Haltemoment ist höher als der Stepper. Beim Fahren sieht man an den Rädern sieht wie der Servo Saver arbeitet. Ohne Positionsrückmeldung wirst das Lego Auto aber nicht gerade fahren, und müssten wir hier immer nachtrimmen. Das RC Auto? Ich habe ein paar Bilder angehängt. Es sind sehr einfache Modelle - Lego Buggy 8256 und - Lego Service Truck 8071 Bei der Größe kann man sehen wiviel Kraft so ein Lenkservo braucht um zu lenken. Günstige Antriebsmotoren für die Hinterachse gibs auch in der Bucht, Gearbest, Aliexpress oder Banggood.
Angehängte Dateien:
-

arduinized_8256__3.jpeg
7,7 KB -

arduinized_8256__4.jpeg
9,3 KB -

arduinized_8256__5.jpeg
8 KB -

arduinized_8256__7.jpeg
9,4 KB -

lego_truck_3_resized.jpg
300 KB -

lego_truck_3_resized__1_.jpg
300 KB
Martin K. schrieb: > Motor 28BYJ-48 Der war für Zeigerinstrumente, der zieht keinen Hering vom Teller und den kannste für die Lenkung vergessen. Ein Standard Modelbauservo ist richtig dafür.
Hallo und guten Abend, vielen Dank für den Hinweis. Johannes S. schrieb: > Martin K. schrieb: >> Motor 28BYJ-48 > > Der war für Zeigerinstrumente, der zieht keinen Hering vom Teller und > den kannste für die Lenkung vergessen. > > Ein Standard Modelbauservo ist richtig dafür. Werde auf Standsrd-Modellbauservos setzen... Wobei mein Modell ja sehr sehr klein ist. Dir nochmals vielen Dank!!
https://m.youtube.com/watch?v=14jF8umwJLI Google einfach nach 28BYJ-48, da findest du viele Infos, auch das man den für <2€ incl. Versand bekommen kann. Hat die Hinterachse kein Differential? Das wäre die nächste Verbesserung.
Für den Antrieb würde ich eher einen gewöhnlichen Getriebemotor (eventuell zuzüglich Odometrie-Sensor) benutzen. Zur Ansteuerung verwendet man eine handelsübliche H-Brücke. Der Stepper-Moitor scheint Dir wegen seiner niedrigen Drehzahl attraktiv zu sein. Bedenke aber, dass er auch entsprechend schwach ist. Die Eigenschaft "Stepper" ersetzt nicht das Getriebe.
Johannes S. schrieb: >> Motor 28BYJ-48 > > Der war für Zeigerinstrumente, der zieht keinen Hering vom Teller und > den kannste für die Lenkung vergessen. Ein Hering allemal! https://www.youtube.com/watch?v=14jF8umwJLI
Hallo und guten Morgen Stefanus F, Johannes S. hallo Mick vorweg: vielen Dank für eure Beiträge - danke für die Hinweise zum Stepper-Motor und zum Drehmoment (Youtube-Video "Stepper motor 28BYJ-48 torque test"). Vielen Dank dafür. Das ist alles sehr hilfreich. Das Vorhaben: was ich vorhabe ist ein kleines Lego-Modell mit Arduino (respektive ESP32) zu betreiben - also z. B. das Lego-Modell 8256, vgl. auch hier sehr schön ( https://www.instructables.com/id/Arduino-izing-Lego-Technic-Go-Kart/ ) Zum Ansatz: Wenn ich den ESP32 einsetze; mit dem ESP32 kann ich über einen entsprechenden Motortreiber, wie etwa dem bereits beim Schrittmotor-set-daypower-s-spsm-5v oder etwa einem anderen Motortreiber für Gleichstrom- und Schrittmotoren eine relativ genaue Positionskontrolle sowie Drehgeschwindigkeit der Motoren vornehmen. Wichtig beim Einsatz des ESP32 ist halt nur, daran denken, dass der nur 3,3V Signale ausgibt. Ergo muss ich vorm Kauf prüfen, ob meine Aktoren damit klar kommen. zum Thema Lenkservo: Und was hier meines Erachtens ja auch mit das tollste ist: den Servo S36 kann ich sogar ohne jede weitere Platine direkt an einem ESP32 betreiben, da dieser Servo lediglich eine Spannungsversorgung sowie ein Datensignal benötigt. https://www.pollin.de/p/mikro-servo-s36-820233 Mikro-Servo S36: Leistungsstarker Mikro-Servo mit JST-Stecker. Ideal für Kleinstmodelle, Sonderfunktionen und Modelle die aufgrund Ihrer Form nur wenig Platz für den Einbau bieten. Technische Daten: Spannung: 6 V- Stellkraft: 0,35 kg/cm Gewicht: 3,6 g Maße (LxBxH): 19,6x20,8x7,9 mm Zwischenfazit: Mit jeder dieser oben genannten Optionen sollte ich eine halbwegs hinreichend genaue Steuerung des Motors erreichen, etwa um dann damit auch die Frontachse gut zu lenken. Für den Antrieb der Räder - also das Vor (und Zurückfahren [wenn ich ne H-Bridge einsetze]): Denke, dass hierfür auch die Gleichstrommotoren sind für den Antrieb Räder auch geeignet. Entweder mit einfachem Schalttransistor für einfaches Ein und Ausschalten des Motors oder mit H-Brücke um den Motor auch Rückwärts drehen zu lassen. Ich denke dass ich neben dem Steppermotor noch einen Gleichstrommotor G150 mit Metallgetriebe mitbestelle. Zit: Dieses Getriebe eignet sich nicht nur für den 1:87 Modellbau, sondern auch für deutlich größere Maßstäbe. Unterschiedliche Untersetzungsvarianten ermöglichen passende Drehgeschwindigkeiten für alle erdenklichen Applikationen. Kleinste Abmessungen bei maximaler Kraft: Zahnräder aus Metall sorgen für maximale Funktionsdauer bei extremsten Belastungen. Technische Daten: Spannungsbereich: 0,3...6 V- Untersetzung: 1:150 Drehzahl: 10...150 U/min Gewicht: 8 g Maße Achse (LxØ): 7x3 mm, geflanscht Maße ohne Achse (LxBxH): 30x12x10mm https://www.pollin.de/search?query=Gleichstrommotor%20G150&channel=pollin-de&sid=3AZbCMk88hoBhszyBqNOiTfQfjn4RZ by the way: guckt euch nochmals die tolle Umsetzung an die Botdemy hier veröffentlicht hat: https://www.instructables.com/id/Arduino-izing-Lego-Technic-Go-Kart/ Botdemy hat halt keinen ESP 32 genommen, sondern einen "Arduino Nano or compatible", Ich setzte auf den ESP 32 - denke dass das einfacher ist - und auch die Funksteuerung einfacher zu implementieren ist.
Warum verwendest du keine Motoren von Lego?
Martin K. schrieb: > by the way: guckt euch nochmals die tolle Umsetzung an die Botdemy hier > veröffentlicht hat: > https://www.instructables.com/id/Arduino-izing-Lego-Technic-Go-Kart/ Motoren mit der Heissklebepistole befestigen ist nicht wirklich ratsam. Sobald über 50°C, schmilzt der weg. Also etwa 15 Minuten Spass und danach in die Werkstatt :-)
Ferngesteuerte Autos benutzen ja üblicherweise einen Gleichstrom-Motor (oder heutzutage teilweise Brushless-Motoren) für den Antrieb, sowie einen Servo für die Lenkung. So hat der in dem Instructables-Artikel das ebenfalls gemacht, und diesen Ansatz würde ich Dir auch empfehlen. Stepper-Motoren hingegen sind eher keine gute Idee, ausser Du hast damit irgendetwas vor, wo wirklich ganz genaue Positionierung wichtig ist. Der 28BYJ-48 bspw. benötigt wegen seiner 1:64-Übersetzung stolze 4096 Schritte für eine einzige Umdrehung - der dreht sich in Zeitlupe, kein Scherz. Dieser G150-Motor sollte okay sein, ausser z.B. einem L293 als Motortreiber brauchst Du dann fast nix. Das ist allerdings wirklich ein ziiiemlich kleiner Motor, das ist Dir hoffentlich bewusst. Wenn Du in China bestellst, kämst Du übrigens deutlich günstiger weg: - der 28BYJ-48-Schrittmotor bspw. kostet dort etwas über einen Euro - Motoren wie der G150 kosten dort ca. 2 Euro - Micro-Servos wie der S36 kriegt man dort teilweise schon unter 1 Euro
Joachim S. schrieb: > Stepper-Motoren hingegen sind eher keine gute Idee, ausser Du hast damit > irgendetwas vor, wo wirklich ganz genaue Positionierung wichtig ist. Das geht schon wegen der Reifen nicht. Jeder krümel auf dem Boden, sowie Schlupf sorgen für eine beträchtliche Abweichung. Der NiboBee Roboter hat einfache DC Motoren mit 3 Ankerwicklungen und zweipolige Permanentmagnete. Das ergibt theoretisch 6 mögliche Winkel, bei denen die Motoren stoppen können. Es ist mir ohne großartigen Aufwand gelungen, maximal eine Rastung von der gewünschten zu weit zu laufen. Damit wollte nur klarstellen, dass man auch mit normalen DC Motoren einigermaßen Präzise Fahrmanöver durchführen kann. Viel besser geht es wegen den Reifen ohnehin nicht.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.