Hallo an alle Forennutzer! Zum Zeitvertreib habe ich mir vorgesetzt einen Hexapod Roboter mit 24 Modellbauservos zu bauen. Er soll per Bluetooth übers Smartphone steuerbar sein. Mit Mikrocontrollern (AVR) habe ich schon Kleinigkeiten realisiert, d.h. Leds blinken lassen, Analoge Temp.Daten eingelesen, Leds mit Tastern gesteuert, USART, aber noch nichts größeres. Um Modellbauservos anzusteuern braucht man PWM und da beginnt das Problem, kein Chip hat 24 PWM Ausgänge. Die Steuerung per Bluetooth braucht auch noch Pins. Wie könnte man das realisieren? Eine Randbedingung gäbe es noch, Bluetooth sollte do simpel wie nur möglich in der Nutzung und Programmierung sein. Arduino soll ja super einfach sein, habe damit persönlich noch keinerlei Erfahrung, ich habe aber auch kein Problem klassisch mit den AVRs zu arbeiten.
Frank schrieb: > Zum Zeitvertreib habe ich mir vorgesetzt einen Hexapod Roboter mit 24 > Modellbauservos zu bauen. Findest du vier Servos für jedes Bein nicht etwas übertrieben? ;) > Um Modellbauservos anzusteuern braucht man PWM und da beginnt das > Problem, kein Chip hat 24 PWM Ausgänge. Die Steuerung per Bluetooth > braucht auch noch Pins. > > Wie könnte man das realisieren? Du könntest selber die IO-Pins steuern, bei kleinen µCs mit wenigen GPIOs per IO-Erweiterungen, z.B. 74hc595 Hier ist ein Beispiel für 16 Servos http://www.seattlerobotics.org/encoder/200106/16csscnt.htm
Es gibt Robotik Servos mit serieller Ansteuerung, z. B. LewanSoul LX-16. Die sind addressierbar und dann kommst du mit einer Steuerleitung für alle aus.
Frank schrieb: > Um Modellbauservos > anzusteuern braucht man PWM und da beginnt das Problem, kein Chip hat 24 > PWM Ausgänge. Die Steuerung per Bluetooth braucht auch noch Pins. > > Wie könnte man das realisieren? Nimm doch den Teensy 4.0 - Arduino-programmierbar und alle Pins können angeblich PWM. Zahlreiche Interfaces, z.B. CAN, was bei einem solchen Projekt auf hilfreich sein könnte. Ich würde jedem Servo ein eigenes Netzteil verpassen. Wenn Du versuchst, die 5V nur an einer Stelle zu generieren und zu verteilen, könnte es bei der Anzahl Probleme in Form von Unterspannung oder Beeinflussung kommen. So ein Einzelnetzteil wäre sehr günstig und klein: https://de.aliexpress.com/item/32921512270.html
Johannes S. schrieb: > LewanSoul > LX-16 Die finde ich super, allerdings ist die Frage, ob der TE 18,66€ * 24 = 448€ ausgeben möchte.
Harald schrieb: > Ich würde jedem Servo ein eigenes Netzteil verpassen. Wenn Du versuchst, > die 5V nur an einer Stelle zu generieren und zu verteilen, könnte es bei > der Anzahl Probleme in Form von Unterspannung oder Beeinflussung kommen. Klar, deshalb betreibt ein EVU auch tausende von Minikraftwerken. Wenn es zu Unterspannung kommt, ist das Netzteil zu schwach. Und wenn es zu Beeinflussung kommt, taugt die Verdrahtung/Entkopplung nichts (sternförmige Verdrahtung, Kondensator an jedem Servo, sofern nicht eingebaut).
Frank schrieb: > kein Chip hat 24 PWM Ausgänge. Stimmt. Aber 16 kannst du haben: https://www.amazon.de/Turspit-PCA9685-PWM-Servoschild-Motortreibermodul-Arduino-Robot/dp/B07Y446ZPP Davon mehrere an einen I²C Bus, und schon hast du mehr als genug. Die Gängigen Bluetooth Module kannst du unter Arduino mit der Serial Klasse ansteuern. Hier sind ein paar Hinweise dazu: http://stefanfrings.de/bluetooth/index.html Ich schließe mich Harald an: Unterschätze die Stromaufnahme und Störwirkung der Motoren nicht. Wahrscheinlich ersparst du Dir eine Menge Stress, indem du für die Motoren ein eigenes Netzteil (oder Batterien) verwendest.
Wolfgang schrieb: > Und wenn es > zu Beeinflussung kommt, taugt die Verdrahtung/Entkopplung nichts > (sternförmige Verdrahtung, Kondensator an jedem Servo, sofern nicht > eingebaut). Das hast du Recht. Für Anfänger ist es jedoch erstmal einfacher, getrennte Netzteile zu verwenden. Die Saubere Entkoppelung können sie später üben, wenn das Grundgerüst steht. Bei nächsten Projekt macht man es dann schon von alleine richtig.
Harald schrieb: > So ein Einzelnetzteil wäre sehr günstig und klein: > https://de.aliexpress.com/item/32921512270.html Das ist kein Netzteil, sondern ein Step-Down Wandler mit maximal 24V Eingangsspannung.
Falls es der Teensy wird, vielleicht noch interessant, dass man Bluetooth über den USB Host anbinden kann: https://www.google.com/search?q=teensy+4.0+bluetooth+usb+host Irgendwo dort steht, dass sich die Beispiele für Teensy 3.6 auch für 4.0 verwenden lassen. Einfach mal recherchieren.
Wolfgang schrieb: > Das ist kein Netzteil Oh danke, von jetzt an werde ich dank dieses Hinweises besser durchs Leben kommen.
Stefanus F. schrieb: > Für Anfänger ist es jedoch erstmal einfacher, > getrennte Netzteile zu verwenden. Die Saubere Entkoppelung können sie > später üben, wenn das Grundgerüst steht. Bei nächsten Projekt macht man > es dann schon von alleine richtig. Danke Stefan, Du hast meinen ursprünglichen Gedankengang sauber ausformuliert!
Harald schrieb: > Die finde ich super, allerdings ist die Frage, ob der TE 18,66€ * 24 = > 448€ ausgeben möchte. Das ist auch ein ambitioniertes Projekt, der Faktor 24 macht das alles etwas teurer. Ob Superbillig Servos eine ausreichende Qualität haben sollte man erst an Einzelstücken testen. Und die Lewansoul sind schon die billigen Brüder der Dynamixel. https://www.heise.de/ratgeber/Dynamixel-Die-Profi-Servo-Liga-4297290.html Aber warum 24 Servos? Hexapoden haben doch 6 Hubelemente?
Johannes S. schrieb: > Ob Superbillig Servos eine ausreichende Qualität haben > sollte man erst an Einzelstücken testen. Das ging mir auch den Kopf beim Verfassen der Nachricht. Billigservos können so manches Problem haben. Belastbarkeit, Lebensdauer, "Zittern" usw. Das von Dir verlinkte Servo sieht schon eine Klasse besser aus. Dsa Buskonzept sieht auch gut aus? Wie ist es aus mit der Buslatenz? Eignet sich die für ein Projekt mit 24 Servos? Vielleicht solltest Du, Frank, tatsächlich erstmal langsam herangehen und nicht gleich das ganze Material zusammenkaufen.
Harald schrieb: > Wolfgang schrieb: >> Das ist kein Netzteil > > Oh danke, von jetzt an werde ich dank dieses Hinweises besser durchs > Leben kommen. Du weisst ja vielleicht, was du meinst. Aber die Kommunikation mit anderen wird ungemein vereinfacht, wenn du die üblichen Begriffe zur Beschreibung verwendest und ihnen nicht irgendwelche eigenen Bedeutungen zuordnest. Stefanus F. schrieb: > Stimmt. Aber 16 kannst du haben: > https://www.amazon.de/Turspit-PCA9685-PWM-Servoschild-Motortreibermodul-Arduino-Robot/dp/B07Y446ZPP Wenn es nicht brandeilig ist, bekommt man die 16 Kanal PWM Module direkt aus Shenzhen auch für einen moderateren Preise. z.B. https://www.ebay.de/itm/132475473698
Für Wolfgang nochmal etwas Literatur zur Weiterbildung: Definition Netzteil: https://de.wikipedia.org/wiki/Netzteil Versorgungsqualität Stromnetz: https://www.tennet.eu/fileadmin/user_upload/Our_Grid/Onshore_Germany/Allgemein/18-090_Brosch%C3%BCre_UW-V4-rgb.pdf
Aus einem Summensignal des MC kann man per Schieberegister einfach Signale für 8 Servos dekodieren. Schaltet man drei SR hintereinander hat man 24. Dazu reichen 3 Pins am MC.
Matthias S. schrieb: > Aus einem Summensignal des MC kann man per Schieberegister einfach > Signale für 8 Servos dekodieren. Schaltet man drei SR hintereinander hat > man 24. Dazu reichen 3 Pins am MC. Hört sich einfach an, hab ich leider nicht verstanden.. Vielleicht kannst du ein Codebeispiel posten? Bitte nicht in Assembler.
Frank schrieb: > Hört sich einfach an, hab ich leider nicht verstanden.. Du generierst ein 24-Kanal Servo Summensignal, taktest das seriell in drei hintereinander geschaltete 8-Bit Schieberegister rein und hängst die Servos an die insgesamt 24 Parallelausgänge.
Was ist denn ein "Servo Summensignal"?
Stefanus F. schrieb: > Was ist denn ein "Servo Summensignal"? Früeher wurde das Summensignal im RC Sender erzeugt und direkt auf den Träger (27, 35 oder 40 MHZ) aufmoduliert (AM, später FM): http://wiki.mikrokopter.de/SummenSignal Im Empfänger wurde dann das Summensignal mit einem Schieberegister und Monoflop dekodiert und auf die Servoausgänge gelegt. Bei den heutigen 2,4Ghz Anlagen passiert das nicht mehr direkt, da werden Datenpakete übertragen. Das Summensignal liegt auch an den Trainer/Schülerbuchsen an. Bei direkter Ansteuerung des SR ist es sehr einfach, da man die Schieberegister resetten kann.
Aha Ok. Das ist aber eine sportliche Aufgabe, wenn der µC noch etwas anderes zu tun hat.
Ich würde mit einem einzelnen Bein anfangen, dieses gesteuert von einem eigenen Subprozessor (evtl. Arduino Micro Pro o.ä.). Dann braucht man auch keine Busexpander oder so'n Kram. Ich würde also mehrere typische Bewegungsmuster, evtl. unter Verwendung eines Tastsensors, hinterlegen. Diese sollten parametrierbar sein (z.B. Ausgreif- oder Schwenkradius, Geschwindigkeit), ansonsten aber autonom ablaufen. Für den Notfall auch noch einen "freien Modus", bei dem die Robot-CPU Durchgriff auf jede einzelne Servoposition hat. Tastet dann erst das Beinchen wie gewollt in der Gegend herum, lohnt es sich, mehrere davon zu bauen und zu schauen, wie die Robot-CPU das Ganze zu so etwas wie "Gehen", "Rennen" oder "Springen" synchronisieren kann ...
wWas wäre denn die kleinste Zeiterinheit die der PWM Puls sich ändern möchte? Von Links nach rechts sind von 1ms bis 2ms, bei 256 Stufen sind das ~0,04ms Da muß das SR aber sehr exakt und schnell angesteuert werden das die PWM Zeiten stabil sind.
Stefanus F. schrieb: > Aha Ok. Das ist aber eine sportliche Aufgabe, wenn der µC noch etwas > anderes zu tun hat. Nö, wieso denn? Timer wird mit dem jeweiligen Kanalwert vorgeladen und schiebt in der OV ISR das Schieberegister weiter. Da drin wird nur ein gesetztes Bit geschoben. Es gibt bei 24 Kanälen allerdings ein Timing Problem. Da der längste Puls für ein Servo 2ms betragen kann, passen in die 20ms eines Frames nur 8-10 Kanäle. Am besten bastelt man also 3 Datenoutputs an drei 8-Bit SR. Wenn man möchte, kann man sich kleine Module mit dem SR und einer Versorgung für jeweils 8 Servos machen, die dann mit 3 Leitungen vom MC gesetzt werden.
Matthias S. schrieb: > Es gibt bei 24 Kanälen allerdings ein Timing Problem. Da der längste > Puls für ein Servo 2ms betragen kann, passen in die 20ms eines Frames > nur 8-10 Kanäle. Die 20ms sind den meisten Servos ziemlich egal, aber die Bewegung wird mit höherer Updaterate flüssiger. Ganz auf die Ablaufsteuerung kann sich der µC konzentrieren, wenn man die Servopulse mit zwei von den oben vorgeschlagenen PCA9685 per Hardware generiert.
Frank E. schrieb: > Diese sollten parametrierbar sein ansonsten aber autonom > ablaufen. Meinst die wie bei Hühnern die nach dem Abhacken des Kopfes manchmal noch weglaufen?
Matthias S. schrieb: > Da der längste Puls für ein Servo 2ms betragen kann, passen > in die 20ms eines Frames nur 8-10 Kanäle. Aha, da kommen wir der Sache schon näher. Meine Servos wollen Impulse bis 2,5ms sehen - also maximal 8 Kanäle. Willst du das dann mit drei Timern parallel machen? > Am besten bastelt man also 3 Datenoutputs an drei 8-Bit SR. Also ja. Krass. Wie sorgst du dafür, dass die ISR der Timer sich nicht gegenseitig ins Gehege kommen? Dann muss der Timer das Schieberegister takten. Das übersteigt allerdings gerade keine Vorstellungskraft. Ist vielleicht schon zu spät heute. Jedenfalls ist das ganz sicher nicht einfach, für Anfänger definitiv ungeeignet.
Stefanus F. schrieb: > Frank E. schrieb: >> Diese sollten parametrierbar sein ansonsten aber autonom >> ablaufen. > > Meinst die wie bei Hühnern die nach dem Abhacken des Kopfes manchmal > noch weglaufen? Im Prinzip ja. Ich würde nicht alles von einer einzigen zentralen CPU machen lassen. Klingt zwar erstmal nach mehr Hardware ... die ist aber billig und die Vorteile (teil-) autonomer Subsysteme sind immens.
So was ähnliches hab ich auch mal gemacht, und zwar einmal mit einem SPI-zu-24xPWM-Umsetzer auf einem FPGA und einmal mit drei Attiny2113s, die jeweils per I2C angesteuert waren und 8 PWM Ausgänge hatten. Die drei Attinys waren jeweils in eine Art Modul integriert, wo auch die Stromversorgung und die 8 Servos untergebracht waren. Softwareseitig lässt sich das relativ einfach umsetzen: man pullt ein Pin hoch, lässt den Timer erst für 255 Takte (1ms bei richtig konfigurierten Prescaler) hochzählen und dann lädt man den Servsollwert (1...255) rein und zählt runter. Dann zieht man den Pin runter, schaltet weiter auf den nächsten und weiter geht's!
Stefanus F. schrieb: > Wie sorgst du dafür, dass die ISR der Timer sich nicht gegenseitig ins > Gehege kommen? Gegenfrage: Wie lange, glaubst du, dauert das Setzen eines Clk Pins? Einmal alle 8 Pulse setzt die ISR auch mal das DIN am Schieberegister. Dann lädt der Timer gemütlich den nächsten TCNT Wert und ist fertig mit der ISR. Bis zum nächsten Aufruf vergehen mindestens 500µs, da bleibt jede Menge Zeit für die anderen Routinen. Stefanus F. schrieb: > Willst du das dann mit drei Timern parallel machen? Warum nicht? Aber die Subunternehmer Idee von Viktor ist auch gut. Ein paar Tinys haben jeweils ein paar Servos unter sich und sprechen per Bus mit dem Robbihirn.
Matthias S. schrieb: > Warum nicht? Weil dann (beim Arduino Uno und Nano) kein Timer mehr für andere Aufgaben frei ist. Aber Ok, mit einem größeren Modell hat man auch mehr Timer.
Matthias S. schrieb: > Gegenfrage: Wie lange, glaubst du, dauert das Setzen eines Clk Pins? > Bis zum nächsten Aufruf vergehen mindestens 500µs Ich meinte eher, dass sich die Ausführung einer ISR verschieben kann, wenn schon eine andere in Arbeit ist. Das sind zwar vermutlich nur ein paar zig Takte, aber ich fürchte, dass diese Verzögerung genügt, um Servos zittern zu lassen. 0,01ms Jitter wären jedenfalls zu viel. Jetzt wo ich nachrechne: Das sind 160 Takte, man muss sich schon blöd anstellen*, um so viel Zeit zu verbrauchen. Du hast Recht, so eng ist es doch nicht. *) mit digitalWrite(), zum Beispiel
Hinweis: Digitalen Servos sind Pausen zwischen den Impulsen sch...egal, selbst wenn die mal für ein paar Sekunden komplett ausfallen, hält das Servo die Position. Nur die Impulsbreite ist relevant ...
Stefanus F. schrieb: > *) mit digitalWrite(), zum Beispiel Aber so blöd sind wir ja nicht. Wir wollen ja einen Robotor basteln und nicht mit Lämpchen rumspielen.
Stefanus F. schrieb: > Das sind 160 Takte, man muss sich schon blöd anstellen*, um so viel Zeit > zu verbrauchen. Du hast Recht, so eng ist es doch nicht. > > *) mit digitalWrite(), zum Beispiel Wer bei solchen Anwendungen mit digitalWrite() hantiert, ist selber Schuld. Wenigsten digitalWriteFast() sollte man dafür in seinen Arduino-Wortschatz aufnehmen. Das spart schon mal einen Faktor 50 bei der Ausführung. https://github.com/NicksonYap/digitalWriteFast
Einen Kampfroboter programmiert man in Assembler.
Johannes S. schrieb: > Aber warum 24 Servos? Hexapoden haben doch 6 Hubelemente? Diese Teil hat 26 Servos (hat aber auch 8 Beine): https://www.youtube.com/watch?v=Yo2TUIEXJig https://www.youtube.com/watch?v=-vVblGlIMgw
ok, Danke. Ich hatte solche Bilder im Kopf, da passte das mit den Servos nicht so richtig: https://de.wikipedia.org/wiki/Hexapod Wünsche dem TO jedenfalls gutes Gelingen. Hab auch nochmal YT geguckt, https://www.youtube.com/watch?v=xDtiL4kP23c Der Top #1 hat Dynamixel verbaut, 6 x 300$ und 12 x 450$, oha.
Dippel schrieb: > Einen Kampfroboter programmiert man in Assembler Bis der kämpft hat ihn KI-0.01 schon fertig gemacht :-)
> Stimmt. Aber 16 kannst du haben: > https://www.amazon.de/Turspit-PCA9685-PWM-Servoschild-Motortreibermodul-Arduino-Robot/dp/B07Y446ZPP > > Davon mehrere an einen I²C Bus, und schon hast du mehr als genug. An so etwas vorgefertigtes habe ich gedacht, davon werde ich mir 1 oder 2 bestellen. > Die Gängigen Bluetooth Module kannst du unter Arduino mit der Serial > Klasse ansteuern. Hier sind ein paar Hinweise dazu: > http://stefanfrings.de/bluetooth/index.html Das werde ich im Hinterkopf behalten, danke. Für den Einstieg habe ich mich nun aber doch entschlossen mit Signalleitungen zu arbeiten um nicht an zwei Fronten gleichzeitig kämpfen zu müssen. > Ich schließe mich Harald an: Unterschätze die Stromaufnahme und > Störwirkung der Motoren nicht. Wahrscheinlich ersparst du Dir eine Menge > Stress, indem du für die Motoren ein eigenes Netzteil (oder Batterien) > verwendest. Guter Rat an den ich mich halten werde. Der Punkt wurde hier im Thema auch heiß diskutiert.
Johannes S. schrieb: > ok, Danke. Ich hatte solche Bilder im Kopf, da passte das mit den Servos > nicht so richtig: > https://de.wikipedia.org/wiki/Hexapod > Wünsche dem TO jedenfalls gutes Gelingen. Da habe ich mich ganz ungenau ausgedrückt, hätte schreiben können, dass es ein Spinnenroboter mit 6 Beinen je 4 Servos werden soll.
Dippel schrieb: > Einen Kampfroboter programmiert man in Assembler. Der Programmierer kann sich dann mit c-hater duellieren. Auf ein C Programm würde er sich nicht einlassen, ist unter seiner Würde.
Frank schrieb: > Für den Einstieg habe ich > mich nun aber doch entschlossen mit Signalleitungen zu arbeiten um > nicht an zwei Fronten gleichzeitig kämpfen zu müssen. Gute Entscheidung.
Angehängte Dateien:
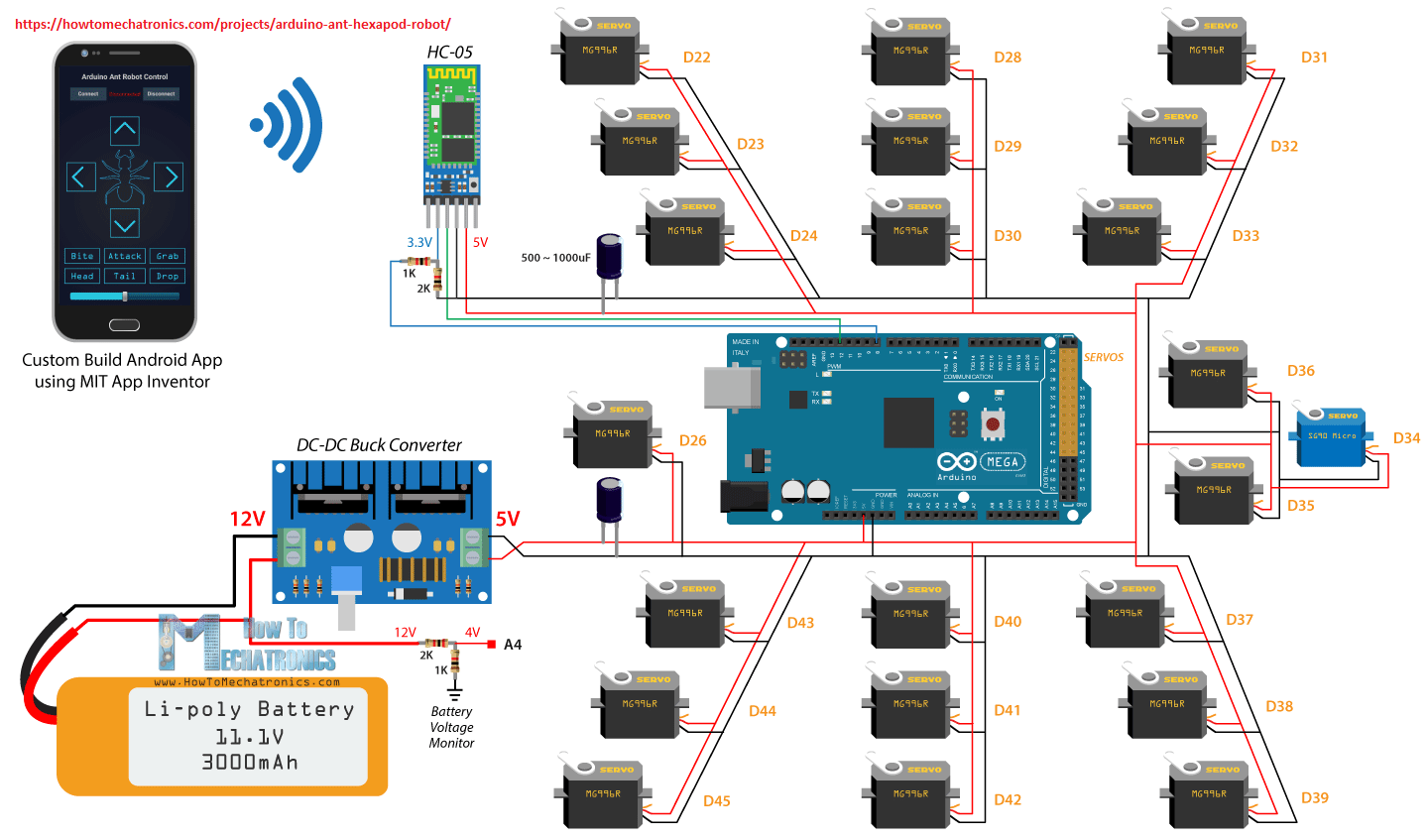
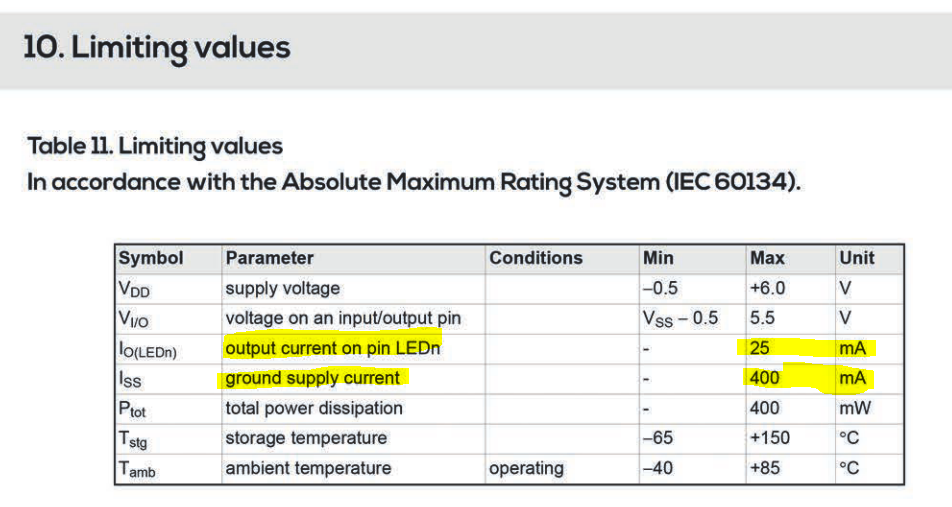
So die Hardware ist besorgt: 12x MG996R TowerPro Servos (3 Gelenke pro Bein) 1x Arduino Mega Board (hat 14 PWM Pins, gibt ne gute Arduino Servo-Lib) 1x HC-05 Bluetoothmodul 1x 3S-Lipo Akku 1x 16x Servo Driver Board (aufgrund Arduino Mega Board vorerst überflüssig*****) Habe mich an diesem Projekt orientiert: https://howtomechatronics.com/projects/arduino-ant-hexapod-robot/ Was mir gut gefallen hat, ist die Realisierung der Elektrik, es wird nur ein starker DC-DC Stepdown Wandler verwendet und ein paar Analogbauteile (Widerstände und Kondensatoren). Da jeder meiner 12 Servos max. 1,4A ziehen kann (in Summe 16,8A), kann ich den 16x Servodriver nicht ohne weiteres verwenden, sondern müsste für jeden Kanal eine kleine Transistorverstärkung bauen. Daher hat mir die Lösung mit dem großen starken Wandler sehr zugesagt und ich habe mir diesen Wandler angeschaut: https://www.amazon.de/Akozon-Wandlermodul-Abw%C3%A4rtswandler-Step-down-Modul-Konstantstrom-LED-Treiber/dp/B07GXQ8MNG/ref=sxbs_sxwds-stvp?__mk_de_DE=%C3%85M%C3%85%C5%BD%C3%95%C3%91&keywords=dc+dc+stepdown&pd_rd_i=B07GXQ8MNG&pd_rd_r=27011af2-b704-45f8-a578-495effc75926&pd_rd_w=Wl2rT&pd_rd_wg=uOutc&pf_rd_p=6d84c7ba-ae72-4e53-b9a4-5df18ccb370e&pf_rd_r=BDSQ8X7AM0WCNQNXP1SZ&qid=1572612993 Taugt der Wandler was oder könt ihr mir etwas besseres empfehlen? ***** Die Pins vertragen lt. Datenblatt nur 25mA wenn sie Strom liefern müssen und 400mA wenn man Strom "reinschickt" sorry für die Wortwahl, bin interessierter Elektroniklaie und nicht Fachmann. Siehe Bild im Anhang mit den Daten.
Frank schrieb: > Da jeder meiner 12 Servos max. 1,4A ziehen kann (in Summe 16,8A), kann > ich den 16x Servodriver nicht ohne weiteres verwenden, Die 25 mA beziehen sich auf den Servodriver PWM Ausgang der mit dem PWM Eingang des Servos verbunden ist. Hierfür sind die 25mA mehr als ausreichend (habe im Servo-Datenblatt dazu leider keine Angaben gefunden). Den running current von 0.9 A bis zu maximal 2.5 A stall current holt sich der Servo von VCC.
Helmut H. schrieb: > Den running current von 0.9 A bis zu maximal 2.5 A stall current holt > sich der Servo von VCC. Super Info, dann kann ich auf 16 Servos aufstocken ohne viel gebastele), danke. Was ist mit dem dc-dc step down converter? Wäre der für meine Zwecke geeignet? Ist die Ausgangsspannung von 5V bei 16A nicht kritisch? Manche Wandler sind da empfindlich habe ich mal gelesen.
Frank schrieb: > Ist die Ausgangsspannung von 5V bei 16A nicht kritisch? Lass uns mal rechnen, laut DB Stall Current 2.5 A (Und du musst rechnen das ALLE Servos diesen ziehen, spätestens beim einschalten wenn sie alle gleichzeitig in die Grundstellung fahren.) Aaaalso: 16x 2,4 = 40A ;-) Im Grunde wird dies im Modellbau aber halt anders gelöst. Hättest du dir einen 2S LiPo organisiert, dann kannst du die Servos direkt aus dem LiPo versorgen, ohne jegliche DC Wandler. Aber darauf achten das der Lipo auch 40A bereitstellen kann.
Tun Dir selbst einen Gefallen und verkabele die Stromversorgung der Servos Sternförmig - nicht so wie im Beitrag Beitrag "Re: Hexapod mit 24 Modellbauservos und Bluetooth Steuerung wie realisieren?" gezeichnet!
Rene K. schrieb: > Im Grunde wird dies im Modellbau aber halt anders gelöst. Hättest du dir > einen 2S LiPo organisiert, dann kannst du die Servos direkt aus dem LiPo > versorgen, ohne jegliche DC Wandler. Aber darauf achten das der Lipo > auch 40A bereitstellen kann. Ich könnte mir also einfach den hier bestellen und ordentlich verdrahten (Sternförmig) und gut ist? Das wäre fast zu schön um wahr zu sein. Aber das probiere ich gerne aus https://www.modellbau-berlinski.de/rc-elektronik-und-akkus/akkus/lipo-und-life/lipo-rc-auto/boost-plus-lipo-power-akku-74v-50c-5400mah-2s-mit-t-plug
Rene K. schrieb: > Im Grunde wird dies im Modellbau aber halt anders gelöst. Hättest du dir > einen 2S LiPo organisiert, dann kannst du die Servos direkt aus dem LiPo > versorgen, ohne jegliche DC Wandler. Aber darauf achten das der Lipo > auch 40A bereitstellen kann. Ein 2S Lipo stellt 7.4V Spannung bereit statt der maximal zul. 7.2V, ist das ein Problem für die Servos? Die Leistungsabgabe bei 7.2 oder 7.4 Volt mit 2.5A ist ja nur minimal, sicher bin ich trotzdem nicht ob die nicht mit der Zeit durchbrennen.
Frank schrieb: > Ein 2S Lipo stellt 7.4V Spannung bereit Wenn er voll geladen ist, sinds sogar 8,4V. Ich würde die nicht auf die Servos schicken, wenns per Datenblatt der Servos ausserhalb der Specs ist.
Frank schrieb: > Ein 2S Lipo stellt 7.4V Spannung bereit statt der maximal zul. 7.2V, ist > das ein Problem für die Servos? D Woher sollen wir das wissen? Guck doch selbst in die technischen Daten deiner Servos.
Stefanus F. schrieb: > Woher sollen wir das wissen? Guck doch selbst in die technischen Daten > deiner Servos. Der Vorschlag kam doch hier ausem Forum, woher soll ich wissen ob das geht? Ich wollte einen Stepdown Wandler einsetzen, habe sogar gefragt ob er sinnvoll ist, habe dann die Antwort bekommen, dass man einfach nen 2S Lipo dranknallen kann und gud is. Daraufhin habe ich sicherheitshalber mal nachgefragt ob das überhaupt gehen könnte oder nicht. Im DaBla steht 7.2V das war doch schon längst klar. An dieser Stelle danke @Matthias für den Hinweis mit den 8.4V, ich bleibe bei meinem Stepdown Wandler, zur Not auch zwei kleine.
Frank schrieb: > Der Vorschlag kam doch hier ausem Forum, woher soll ich wissen ob das > geht? Indem du den Vorschlag mit den technischen Daten der Servos abgleichst. Wenn da zum Beispiel "maximal 7,2 Volt" steht, dann würde ich da keine Akkus anschließen, die frisch geladen mehr als 8 Volt liefern. Der Punkt ist: Du brauchst eine Kombination von Servo und Akku, die zusammen passt. Das ist jedem Spannungswandler vorzuziehen. Mit Spannungswandler wird dein Aufbau nur noch komplizierter und du bekommst weitere Effekte, die du noch weniger verstehst.
Stefanus F. schrieb: > Der Punkt ist: Du brauchst eine Kombination von Servo und Akku, die > zusammen passt. Das ist jedem Spannungswandler vorzuziehen. Das habe ich verstanden, aber wie bekomme ich die 8.4V und knapp 20A auf 7.2V? Als Laie kommt mir nur ein Stepdown Wandler in den Kopf, deshalb frage ich mich hier im Forum durch. Was ist also deine Empfehlung?
Frank schrieb: > Das habe ich verstanden, aber wie bekomme ich die 8.4V und knapp 20A auf > 7.2V? Na mit einem Spannungswandler, aber den sollst du vermeiden. Deswegen empfehle ich dir keinen. 20A sind kein Pappenstiel.
Mein Vorschlag eingangs bzgl. eines eigenen DCDC-Netzteils(!) pro Servo hatte ist ja leider als unnötiger Blödsinn abgetan worden. Schade.
Harald schrieb: > Mein Vorschlag eingangs bzgl. eines eigenen DCDC-Netzteils(!) pro Servo > hatte ist ja leider als unnötiger Blödsinn abgetan worden. Schade. Das ist auch Blödsinn. Nimm lieber passende Servos für den Akku oder einen passenden Akku für die Servos. So schwer ist das nicht!
Nimm das externe board für die Servos, dann der Mega kann nur max 6 servos gleichzeitig, das externe board 16. Nacheinander die Servos bewegen ist für einen Hexapod nicht das richtige.
Stefan F. schrieb: > Das ist auch Blödsinn. Nimm lieber passende Servos für den Akku Na dann, alles gut ;-)
Angehängte Dateien:
-

Quadruped_1.PNG
140 KB

Harald schrieb: > Na dann, alles gut ;-) Hallo Harald, ich habe deine Lösung bisher nicht in die Engere Wahl genommen weil ich von der Menge zurückgeschreckt bin (12 einzelne Konverter irgendwie unterzubringen und zu verdrahten). Grundsätzlich denke ich aber, dass es ohne einen Konverter nicht gehen wird bzw. dass es nicht einfacher gehen wird. Was sagst du denn zu dem von mir geposteten Konverter? Es muss nicht das 20A Monster sein, gerne auch zwei kleinere, dann könnte man den linken und rechten Teil des Roboters separat versorgen, das wären dann gerade mal 6 Servos pro Akku, ist vielleicht auch nicht schlecht. Einen grober Entwurf vom Model habe ich mal angehängt, zum programmieren und testen ist das gut genug, Details werden erst gemacht wenn alles sauber tut.
Chris schrieb: > Nimm das externe board für die Servos, dann der Mega kann nur max 6 Das Arduino Mega Board kann mit der Servo Library Frank schrieb: > Hallo Harald, ich habe deine Lösung bisher nicht in die Engere Wahl > genommen weil ich von der Menge zurückgeschreckt bin (12 einzelne > Konverter irgendwie unterzubringen und zu verdrahten). Grundsätzlich > denke ich aber, dass es ohne einen Konverter nicht gehen wird bzw. dass > es nicht einfacher gehen wird. > > Was sagst du denn zu dem von mir geposteten Konverter? Es muss nicht das > 20A Monster sein, gerne auch zwei kleinere, dann könnte man den linken > und rechten Teil des Roboters separat versorgen, das wären dann gerade > mal 6 Servos pro Akku, ist vielleicht auch nicht schlecht. Habe nochmal nachgerechnet, ich bräuchte pro zwei Beine (=6 Servos) 15A, demnach müsste ich also ohnehin zwei Konverter kaufen: https://www.amazon.de/gp/product/B07RGWJHPZ/ref=ox_sc_act_title_2?smid=AETO64PHCI4NL&psc=1 Oder sollte ich lieber einen mit 40A nehmen? Was ist besser, zwei oder ein Konverter? Akkus hätte ich aus meinem RC-Flugzeug da, es sind 3S Akkus mit 11,1V, man könnte also jede Seite mit einem Akku und DC Wandler versorgen.
Hallo Frank, man muss das ja nicht so bauen, wie ich das vorgeschlagen habe. Das war nur ein Vorschlag, wie ich so etwas angehen würde. Ich habe dabei ausdrücklich keinen Anspruch auf die einzig perfekte Lösung. Schade ist hauptsächlich, dass der Ton im Forum regelmäßig komplett abdriftet und Vorschläge außer dem Eigenem als „Blödsinn“ abgetan werden. Oder gar Beleidigungen erfolgen, was hier in diesem Thread glücklicherweise bisher nur ansatzweise vorkam. Also, wenn es DICH interessiert, gerne: Die oben verlinkten Wandler sind sehr klein, flach, supergünstig und auch vom Spitzenstrom gut passend für ein Servo. Ich würde die direkt am Servo (Spiegelklebeband) oder in unmittelbarer Nähe anbringen. Die Versorgungsspannung kann dann recht hoch ausfallen, vielleicht eignet sich sogar ein 18V/2Ah Werkzeugakku. Oder auch der 11V Akku, den du gekauft hast. Der Strom ist dann niedriger und die Leitungen können dünner ausfallen. Man muss dann auch nicht alles konsequent sternförmig verdrahten sondern z.B. nur pro Bein (Achse?). Könnte bei der Leitungsführung helfen. Wenn Du nur einen oder zwei zentrale (fette) Wandler aufbaust bist du meiner Meinung nach keinen Schritt weiter. Die sternförmige Verdrahtung mit dicken Leitungen bleibt dann ja bestehen. Und du musst den 5V/20A irgendwo hinbauen und das Gewicht im Aufbau tragen. Ich würde auch keine PWM Erweiterungsplatinen benutzen, auch keine CPU, die die PWMs per SoftPWM erzeugt. Meiner Meinung nach hat SoftPWM das Potential zum Jitter (Wackeln), vor allem dann, wenn die CPU noch etwas anderes machen soll (Funk, Algorithmus). Daher mein Hinweis auf eine CPU, die einfach alle PWMs in Hardware bedienen kann. Aber auch hier gilt, das wäre mein Lösungsansatz, andere Leute können das gerne anders machen oder sagen, dass das Kanonen auf Spatzen sind. Ich würde es trotzdem so machen. Viel Erfolg!
Dann nimmt man Lifepo Akkus. 2S haben 6,4V nominal. Bin mir bei Liefepo aber nicht sicher ob diese die 40A Peak bringen können. Ich denke du solltest das Gewicht so gering wie möglich halten. Die Tower Pro sind nun NICHT gerade für ihr extremes Haltemoment berüchtigt. Was die PWM angeht: das sehe ich genauso wie Harald. Du benötigst für alle Servos ein PWN Kanal. Softpwm scheitet bei den Towerpro aus. Du wirst das Zittern der Servos nie in den Griff bekommen. Desweiteren, kannst du ja nun probieren wenn du die Servos hast, fällt Multiplexing aus (Servos nacheinander ansteuern) - sobald die PWM von einem Servo genommen wird, wird dieser sein Haltemoment verlieren: Zittern. Entweder ein MC mit entsprechend vielen Hardware-PWM oder ein/zwei PWM IC nutzen.
Der Vierbeiner wird nicht laufen, höchstens schlurfen. Wenn ein Bein hoch geht, kippt er in genau diese Richtung. Es sollten immer mindestens 3 Beine am Boden um den Massemittelpunkt herum sein. Blackbird
Stefan F. schrieb: > Der Punkt ist: Du brauchst eine Kombination von Servo und Akku, die > zusammen passt. Das ist jedem Spannungswandler vorzuziehen. Rene K. schrieb: > Dann nimmt man Lifepo Akkus. 2S haben 6,4V nominal. Bin mir bei Liefepo > aber nicht sicher ob diese die 40A Peak bringen können. Harald schrieb: > Wenn Du nur einen oder zwei zentrale (fette) Wandler aufbaust bist du > meiner Meinung nach keinen Schritt weiter. Die sternförmige Verdrahtung > mit dicken Leitungen bleibt dann ja bestehen. Und du musst den 5V/20A > irgendwo hinbauen und das Gewicht im Aufbau tragen. Habe nochmal überlegt und habe mich jetzt dazu entschieden es mit LiFePo-Akkus zu versuchen. Die Ladeschlussspannung übersteigt die zul. Spannung der Servos nicht und die Servos laufen selbst noch bei 4,8V. Außerdem wurde auf die passende Akku/Servo Kombi hingewiesen und da scheinen die LiFePo perfekt zu sein. Habe günstig zwei 2S-30C(konstant) für je 8,95€ erstanden. Ich berichte weiter wenn es neues gibt!
Frank schrieb: > Habe günstig zwei 2S-30C(konstant) für je 8,95€ erstanden. Das klingt gut, erspart Dir möglichen Stress mit den Spannungswandlern.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.