Hallo ihr Lieben! Ich arbeite an einem Hobby-Projekt, bei dem ein Schrittmotor mal angetrieben, mal gebremst werden soll. Vorerst möchte ich auf einen Stepper-Controller verzichten und setze eine 2er-H-Brücke ein, um das Prinzip besser zu verstehen. Die normale Steuerung funktioniert bereits einwandfrei, fürs Bremsen habe ich nun folgendes überlegt: Wenn alle Spulen kurzgeschlossen werden (d.h. alle 4 Pins miteinander verbunden) liegt ja bekanntlich ein großes Bremsmoment vor. => Wenn ich nun alle 4 Stepper-Pins mittels 4 MOSFETs auf GND ziehe, sollte der Effekt ja der gleiche sein, oder leiten durchgeschaltete FETs (wie BJTs) nur in eine Richtung?
Johnny Q. schrieb: > leiten durchgeschaltete FETs (wie BJTs) nur in eine Richtung? Nein. Johnny Q. schrieb: > Wenn ich nun alle 4 Stepper-Pins mittels 4 MOSFETs auf GND ziehe Mit Deiner Johnny Q. schrieb: > H-Brücke Geht das. Einfach beide unteren Transistoren einschalten. Macht man auch bei "normalen" Motoren so. Gruss Chregu
Man kann das Bremsen auch durch ZEITLICH andere Ansteuerung unterstützen. Allgemein: https://www.mikrocontroller.net/articles/Schrittmotoren
Danke Euch für die hilfreichen Antworten! Noch etwas für die Stepper-Experten: Wie erreiche ich ein maximales Haltemoment? Spulen kurzschließen, oder permanente Bestromung der Spulen, oder ..?
Johnny Q. schrieb: > Noch etwas für die Stepper-Experten: Wie erreiche ich ein maximales > Haltemoment? Spulen kurzschließen, oder permanente Bestromung der > Spulen, oder ..? Strom auf die Spulen.
Johnny Q. schrieb: > Vorerst möchte ich auf einen > Stepper-Controller verzichten und setze eine 2er-H-Brücke ein, um das > Prinzip besser zu verstehen. Dann lies doch wenigstens mal das Wiki durch! https://de.wikipedia.org/wiki/Schrittmotor
Teo D. schrieb: > Dann lies doch wenigstens mal das Wiki durch! > https://de.wikipedia.org/wiki/Schrittmotor Was denkst du denn, was ich vorher gemacht habe! Wiki, Bücher, div. Internetquellen. Deinen Wiki-Link kannste für dich behalten. Nils schrieb: > Strom auf die Spulen. OK dass hätt ich auch erwartet, danke dir!
Hallo Da brauchst Du nicht gleich pampig werden, ich zitier mal aus dem link: "Das Drehmoment eines Schrittmotors ist proportional zum Strangstrom, [...]Der Drehmomentverlauf besitzt im Stand sein Maximum und sinkt bei hohen Drehzahlen ab[...]" Wenn Du das gelesen hättest sollten deine Fragen eigentlich schon geklärt sein. Gruß Ulf
Ulf L. schrieb: > [...]Der Drehmomentverlauf besitzt im Stand sein Maximum und sinkt bei > hohen Drehzahlen ab[...]" Und genau das klärt die Frage ja eben NICHT, da hier der Fakt außer Acht gelassen wird, dass eben auch ein erhöhtes Drehmoment (Haltemoment) beim bloßen **Kurzschließen** der Spulen abgegeben wird. Genau darauf zielte die Frage eben ab, und User wie Nils haben es einfach beantwortet (danke!), statt irgendwie herum zu klugscheißern.
Was tobst du hier rum. Nimm einen Kontroller. Wenn die Spulen keine Impulse kriegen, also ein Gleichstrom *, hat es den größten Haltemoment. Es gibt aber auch welche, wo der Haltestrom abgesenkt wird. Das brauchst du dann nicht nutzen. * Das ist der Strangtrom, den du am Anfang irgendwie einstellen mußt.
Angehängte Dateien:
-

l298n.png
36 KB
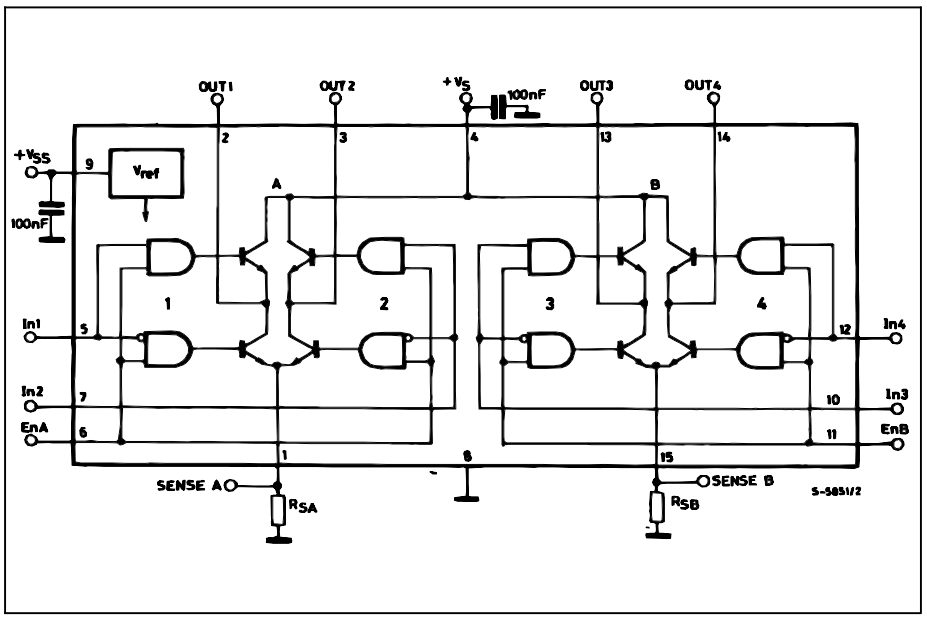
Hallo! Ich muss den Thread nochmal aus der Versenkung holen... Mit der Doppel-H-Brücke L298N möchte ich den Schrittmotor bremsen. Das normale Ansteuern (00>01>11>10) klappt problemlos, Motor dreht sich. Um den Motor nun durch Kurzschließen der Spulen zu bremsen, habe ich die Eingänge (ABCD) des L298N einmal auf 0000 und dann auf 1111 gesetzt. In beiden Fällen würden dann ja entweder die oberen oder die unteren zwei Transistoren der H-Brücke durchschalten (vgl. Bild aus dem L298N-Datenblatt) und die beiden Spulenanschlüsse jeweils entweder mit GND oder VCC verbinden (und damit kurzschließen). Leider ist kein erhöhtes Drehmoment spürbar. Zum Vergleich habe ich die vier Stepper-Pins alle mit diskreten MOSFETs auf Masse gezogen. Das funktionierte, der Motor war spürbar schwergängiger. Wenn ich mit dem Multimeter den Widerstand an den Schrittmotorausgängen messe, komme ich auf einen Wert um 150R. Eigentlich sollte er null sein?! Kann jmd dieses Verhalten erklären? VG...
Ganz einfach, deine Brücke nutzt Bipolartransistoren. Im Gegensatz zu Mosfets sind diese nicht revers leitfähig. Auch wenn einer leiten könnte, sein "Partner" auf der anderen Seite lässt den Strom nicht durch. Abhilfe: eine Mosfet Brücke nehmen. Oder: 4 Dioden, jeweils eine pro Transistor, parallel zu selbigen Transistoren
Johnny Q. schrieb: > Mit der Doppel-H-Brücke L298N möchte ich den Schrittmotor bremsen. Das > normale Ansteuern (00>01>11>10) klappt problemlos, Motor dreht sich. Dann steuere den Motor einfach so an, dass er kontrolliert immer langsamer fährt, bis er letztlich mit 0Hz angesteuert wird. Dann steht er. "Abbremsen" eines Schrittmotors ist in diesem Fall genau das selbe wie "Anfahren". Nur eben mit Reduzierung des Taktes statt mit einer Erhöhung. Alles andere Gemurkse mit "Kurzschließen" hat Schrittverluste zur Folge, die man normalerweise nicht haben will, wenn man denn schon Schrittmotoren einsetzt. > Wenn ich mit dem Multimeter den Widerstand an den Schrittmotorausgängen > messe, komme ich auf einen Wert um 150R. Eigentlich sollte er null > sein?! Wo hat ein Schrittmotor "Ausgänge"? Was misst du da wie und wo unter welchen Bedingungen? Oder hast du da tatsächlich an den bestromten Ausgängen des Schrittmotortreibers mit dem Ohmmeter herumgemessen? Falls ja: wie kommst du auf die Idee, in einer unter Spannung stehenden Schaltung mit einem Ohmmeter irgendwas sinnvolles messen zu können? Immerhin ist so ein Ohmmeter selbst ja auch eine Stromquelle...
Lothar M. schrieb: > Dann steuere den Motor einfach so an, dass er kontrolliert immer > langsamer fährt, bis er letztlich mit 0Hz angesteuert wird. Dann steht > er. > "Abbremsen" eines Schrittmotors ist in diesem Fall genau das selbe wie > "Anfahren". Nur eben mit Reduzierung des Taktes statt mit einer > Erhöhung. Na da hast Du meinen Anwendungsfall aber vergessen: Der Stepper wird zusätzlich durch äußere Kräfte bewegt, und daher soll das Haltemoment manipuliert werden. Schrittverlust ist in dieser Anwendung irrelevant, da mit Positionssensor gearbeitet wird. Lothar M. schrieb: > Wo hat ein Schrittmotor "Ausgänge"? Was misst du da wie und wo unter > welchen Bedingungen? Naja ich meinte die Ausgänge des L298N für den Schrittmotor, war etwas ungenau ausgedrückt, sorry. Gemessen wurde Strom und Spannung über einem 4,7Ohm Widerstand.
Johnny Q. schrieb: > Na da hast Du meinen Anwendungsfall aber vergessen: Der Stepper wird > zusätzlich durch äußere Kräfte bewegt, und daher soll das Haltemoment > manipuliert werden. Dann halt kontrolliert Strom durch die spule(n) schicken. Damits unabhängig von der äußeren Kraft wird. So wäre ja quasi bei null Kraft, null Haltemoment.
Johnny Q. schrieb: > Na da hast Du meinen Anwendungsfall aber vergessen: Der Stepper wird > zusätzlich durch äußere Kräfte bewegt, und daher soll das Haltemoment > manipuliert werden. Schrittverlust ist in dieser Anwendung irrelevant, > da mit Positionssensor gearbeitet wird. Du hast offenbar nie nachgelesen, wozu Schrittmotoren geeignet sind und wozu nicht. Definiertes Drehmoment erzeugen sie nicht. Nimm Servomotore, dss sind bei deiner Leistung Permanentmagnet-Gleichstrommotore. Die lassen sich durch Strombegrenzung sehr gut im Drehmoment regeln, und für die Position hast du ja deinen Encoder. Ein Schrittmotor ist bei dir FEHL AM PLATZE.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.