Hi zusammen,
ich bin seit längerem dabei eine BLDC Motor Steuerung zu bauen. Jetzt
wollte ich den ganzen Spaß mal Probeweise mit einem "kleinen" 500 W BLDC
Motor testen. Nur leider springt die Strombegrenzung meiner Netzteile
immer ein (sind beide auf 3A hochgedreht).
Jetzt habe ich ein bisschen Angst, nicht dass ich doch einen größeren
Denkfehler hier drin habe.
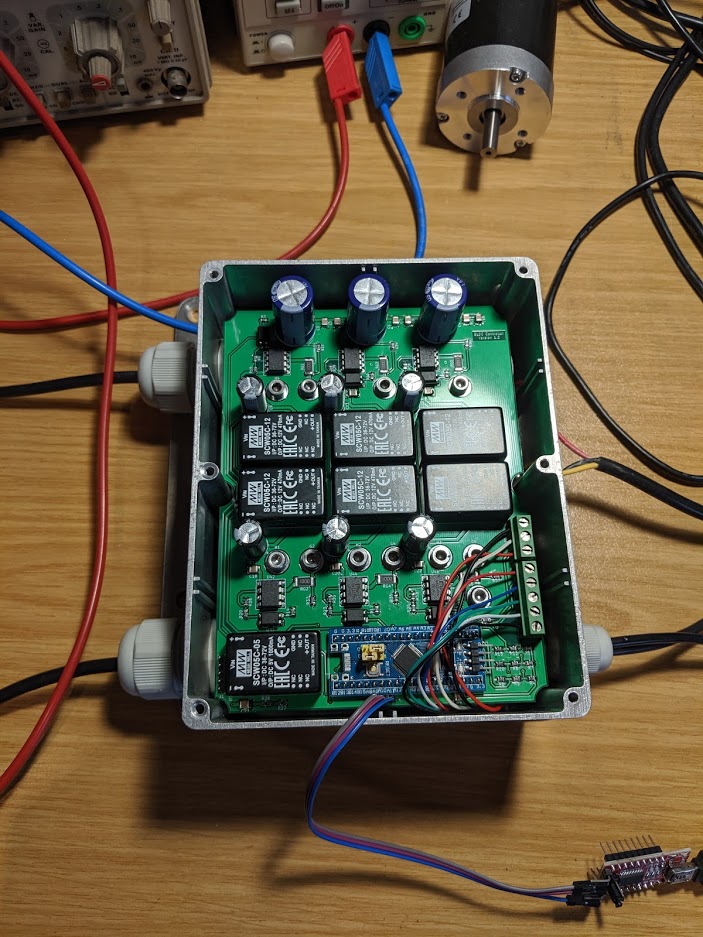
Ich habe für jeden FET in den 3 Halbbrücken einen eigenen DC/DC Wandler
(Ausgang + Eingang von einander Isoliert) macht also insgesamt 6 DC/DC
Wandler für den "Leistungsteil" und noch einen 5V DC/DC Wandler für den
Mikrocontroller etc. Die FET Treiber werden über Optokoppler vom
Mikrocontroller angesteuert.
Fet´s sind:
https://www.tme.eu/de/details/ixfn360n10t/mosfet-transistormodule/ixys/
Vielleicht könnt Ihr mir sagen ob das theorethisch überhaupt
funktionieren würde. Ich bin nur kleiner Azubi und habe nicht so das
riesen Wissen wie vielleicht andere.
Danke und viele Grüße
Peter
Anbei noch mein Code. Ist noch nicht fertig und muss dazu sagen, dass
ich noch nie das Programmieren so richtig gelernt habe.
Peter H. schrieb:> Hall01 = digitalRead(PA4);> Hall02 = digitalRead(PA3);> Hall03 = digitalRead(PA2);> if (Hall01 == 0 && Hall02 == 1 && Hall03 == 1)> {analogWrite(PWM3, 5000);> analogWrite(PWM6, 5000);> Hall01 = digitalRead(PA4);> Hall02 = digitalRead(PA3);> Hall03 = digitalRead(PA2);}
* Du musst nur einmal pro Durchlauf die Sensoren lesen und danach die
Endstufen setzen. Es hat keinen Sinn, das bei jedem Schritt wieder zu
tun.
Ich würde den Hallsektor vermutlich in eine Zahl verwandeln, und die als
Zeiger in eine kleine Tabelle tun, in der die Bestromung der Spulen
festgelegt wird.
* Wo schaltest du denn die PWM für die im Moment nicht bestromten Spulen
ab? Ich bin nicht so ein Arduinist, aber wenn der MC wirklich 6 PWMs am
Stück kann, die sich auch nicht überlappen, dann laufen die so lange
weiter, bis man sie wieder auf 0 setzt.
Ich empfehle dir, mal die Application Note AVR447 (heute Microchip
AN_8010) zu studieren. Da wird beschrieben, wie man mit 3 Timern eines
Mega168 6 sich nicht überlappende, komplementäre Signale für 3 Phasen
(aka Halbbrücken) erzeugt.
https://www.microchip.com/wwwAppNotes/AppNotes.aspx?appnote=en591447
Können deine Optokoppler genügend Gatespannung erzeugen? Die dicken
MOSFet werden sicher mehr als 5V Ugs benötigen, um sauber
durchzusteuern. Schaltungsauszug kann also nicht schaden, zumal du nicht
schreibst, wieviel Spannung die 6 DC/DC Wandler nun erzeugen.
Hmm weiss gerade selber nicht wie man das am besten macht. Ich habe beim
Programmieren selber nicht so den Durchblick.
Also anscheinend geht das so wie ich das gedacht habe nicht.
Dann muss ich das ganze wohl doch versuchen anders zu lösen. Puh :-/
Den Link von Dir kuck ich mir mal an, Danke!
Die Optokoppler werden am Eingang vom Mikrocontroller angesteuert und
steuern am Ausgang die Gate Treiber an. Die wiederum schalten die FET´s.
Die 6 DC/DC Wandler liefern 12V und 470 mA.
Würde das Ganze den "Hardware-technisch" überhaupt funktionieren?
Danke und viele Grüße
Peter
Peter H. schrieb:> Würde das Ganze den "Hardware-technisch" überhaupt funktionieren?
Zeig doch bitte mal den Schaltplan für (mindestens) eine Halbbrücke vom
MC bis zu den MOSFet.
Oh, sorry, habe ich glatt übersehen :-O
Das sieht alles recht hochohmig um den Optokoppler aus. Was für eine PWM
Frequenz benutzt der MC? Bei den insgesamt etwa 16k als Arbeitwiderstand
ist da recht wenig Strom und niedrige Grenzfrequenz zu erwarten - zumal
der PC817 kein Geschwindigkeitswunder ist.
Wenn du Optokoppler benutzen willst, schau dir mal die Endstufen in
meinem FU an:
https://www.mikrocontroller.net/articles/3-Phasen_Frequenzumrichter_mit_AVR
Vorsicht - bei deiner Schaltung gibt es keine Verriegelung gegen einen
'Shoot-Through', also das gleichzeitige Leiten des oberen und des
unteren MOSFet der Halbbrücke. Dein Programm darf also keinesfalls die
Halbbrücke beidseitig anschalten, sonst knallts.
Kann mir jemand die Theorie zu den ganzen DC/DC Wandlern erklären?
Versorgst du eine Motorphase jeweils aus zwei Wandlern? Benötigst du
keine Stromregelung?
Schau dir mal an wie das in Appnotes gelöst wurde, oder z.B. beim
Odrive.
Hi,
Waren die Abfragen wirklich so gedacht?
> if (Hall01 == 0 && Hall02 == 1 && Hall03 == 1)> {analogWrite(PWM3, 5000);> analogWrite(PWM6, 5000);> Hall01 = digitalRead(PA4);> Hall02 = digitalRead(PA3);> Hall03 = digitalRead(PA2);}> if (Hall01 == 0 && Hall02 == 1 && Hall03 == 1)> {analogWrite(PWM3, 5000);> analogWrite(PWM2, 5000);
bestimmt ein Schreibfehler.
Mit was wolltst du denn die Drehzahl festlegen?
Die PWMs können maximal die Bestromung einer Wicklung festlegen.
Die vorgesehenen OK sind dafür aber komplett ungeeignet weil zu langsam.
470mA für 1 Fet. Naja da sind verschiedene Typen unterwegs.
Für einen fetten ist es sehr knapp. Für die 3 Treiber auf der GND-Seite
brauchst du keine separate Stromversorgung, die kannste alle auf eine
hängen.
(Schaden tut es aber auch nicht direkt)
Wie schon von anderen geschrieben, ein gesetzte PWM bleibt gesetzt wenn
sie nicht abgeschaltet wird.
Ich sehe im Hintergrund ein Oszi, du hast also gute Möglichkeiten das zu
testen was du erreichen möchtest.
Viel erfolg, Uwe
Andre schrieb:> Kann mir jemand die Theorie zu den ganzen DC/DC Wandlern erklären?> Versorgst du eine Motorphase jeweils aus zwei Wandlern?
Wenn man sich auf DC/DC Wandler statt Ladungspumpen festlegt, dann ist
es schon richtig, das die Highside für jede Halbbrücke einen eigenen
DC/DC Wandler benötigt. Wie Uwe schon schrieb, kann die Lowside aus
einem einzigen gespeist werden oder ganz ohne auskommen.
Es ist schon ein wenig schade, das die Platine super aussieht, aber
vorher kein Rat eingeholt wurde.
Okay danke euch.
Den Code schmeiss ich dann erstmal in den Muell und denk mir was neues
aus.
Die Spannungsteiler am Ausgang von den OPV's werde ich dann noch etwas
anpassen.
Reichen die 470mA echt nicht? Ich hab ja noch einen dicken 1000uF Elko
am Ausgang(sorry ist im Schaltplan falsch beschriftet)
Danke und viele Grüße
Peter
Ich kenne die Arduino Funktion jetzt nicht genau aber ich bezweifle dass
die ein komplementäres PWM mit Dead Time erzeugt demnach schließt du
vermutlich einfach deine Versorgungsleitung kurz.
So also Motor dreht sich :-)
Leider noch nicht so richtig.
Beim anlaufen muss man ihm kurz helfen, denke das liegt aber an meinen
Netzteilen.
Das größte Problem jetzt ist, dass der Motor extrem Langsam läuft.
Ich weiss nicht zu 100% an was das liegt, aber ich vermute, dass die PWM
Frequenz, die der Mikrocontroller ausgibt mit 500Hz noch deutlich zu
niedrig ist.
Wenn ich das noch hinbekommen würde, dann wäre das optimal.
Anbei noch mein Code, ich musste in den if-conditions die anderen PWM
Ausgänge nur wieder auf 0 Schalten, das war denke ich der Fehler.
Peter H. schrieb:> Serial.println(Hall01);> Serial.println(Hall02);> Serial.println(Hall03);> Serial.println();
Das schluckt den Löwenanteil deiner Schleifenzeit und deshalb dreht der
Motor auch so langsam. Die serielle Ausgabe ist hier fehlplaziert, denn
es handelt sich um eine blockierende Routine, die so lange wartet, bis
auch das letzte Zeichen auf dem Weg ist.
Mit der PWM Frequenz hat das nur ganz am Rande zu tun, z.B., wenn die
Periode der PWM länger ist als das Durchlaufen eines Sektors.
Sinnvoll wäre es, die Hallsensoren einen Interrupt auslösen zulassen,
der die Bestromung der Endstufen einstellt.
Peter H. schrieb:> Meinst du external interrupts ?
Ja. Du benutzt da STM32, der für sowas prima geeignet ist, wo es aber
sein kann, das du dich vom Arduino Zeug zumindest teilweise lösen
solltest.
Mein altes BLDC Projekt mit STM32F100RB (VLDiscovery Board) und SPL
initialisiert das z.B. folgendermassen:
Damit ist der EXTI Interrupt so konfiguriert, das jeder Flankenwechsel
an einem der Hallsensoren die ISR auslöst.
In dieser wird der Sektor gelesen und dann die neue Bestromung
festgelegt. Die Sache ist etwas komplizierter, weil ich Sinusmodulation
benutze, aber das Prinzip bleibt das gleiche.
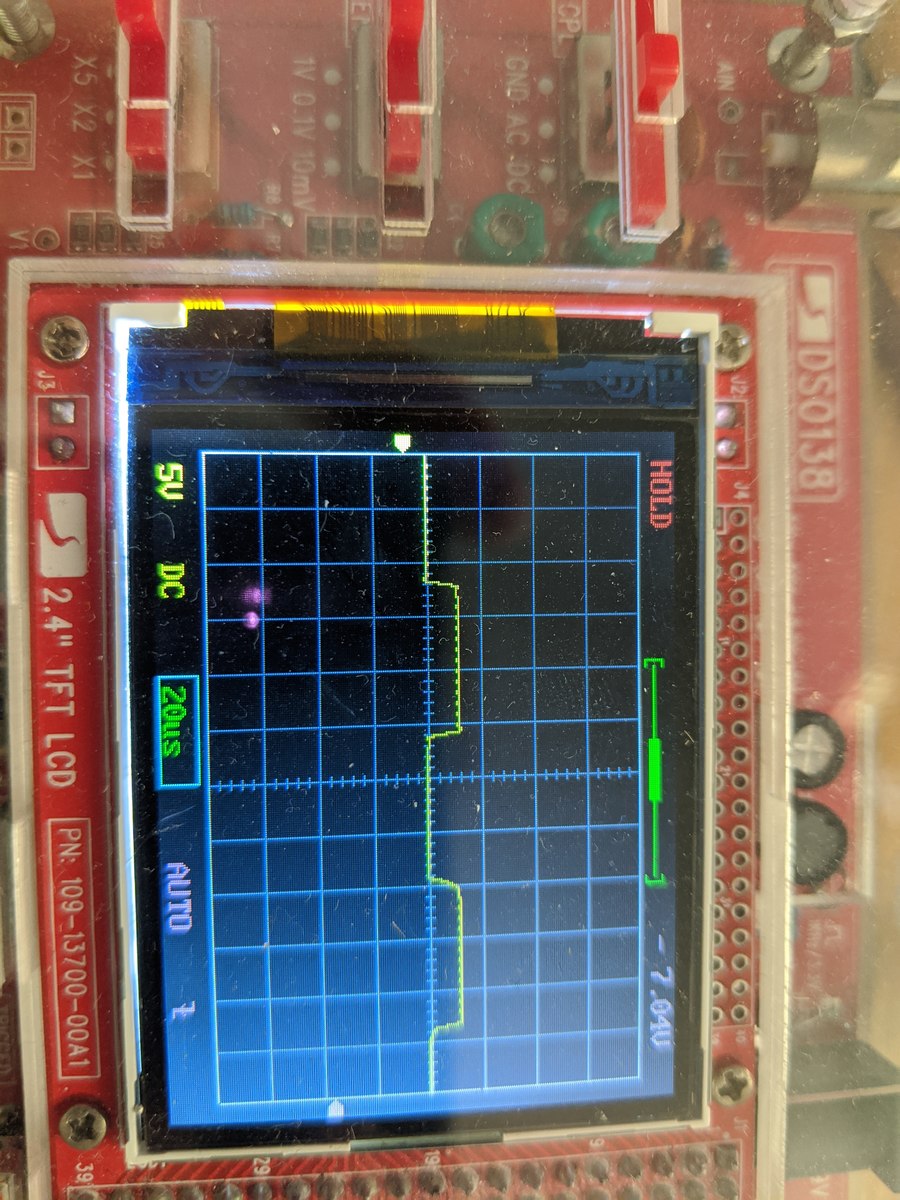
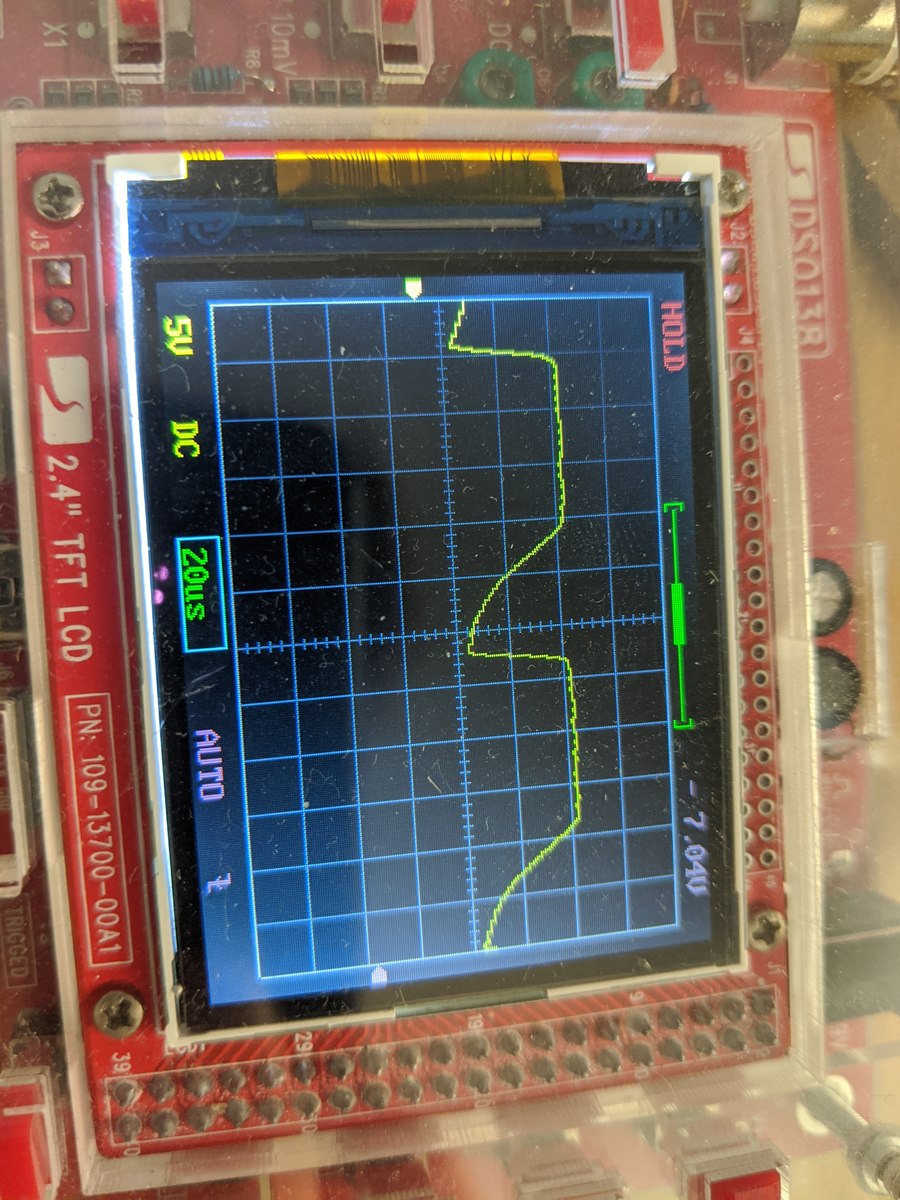
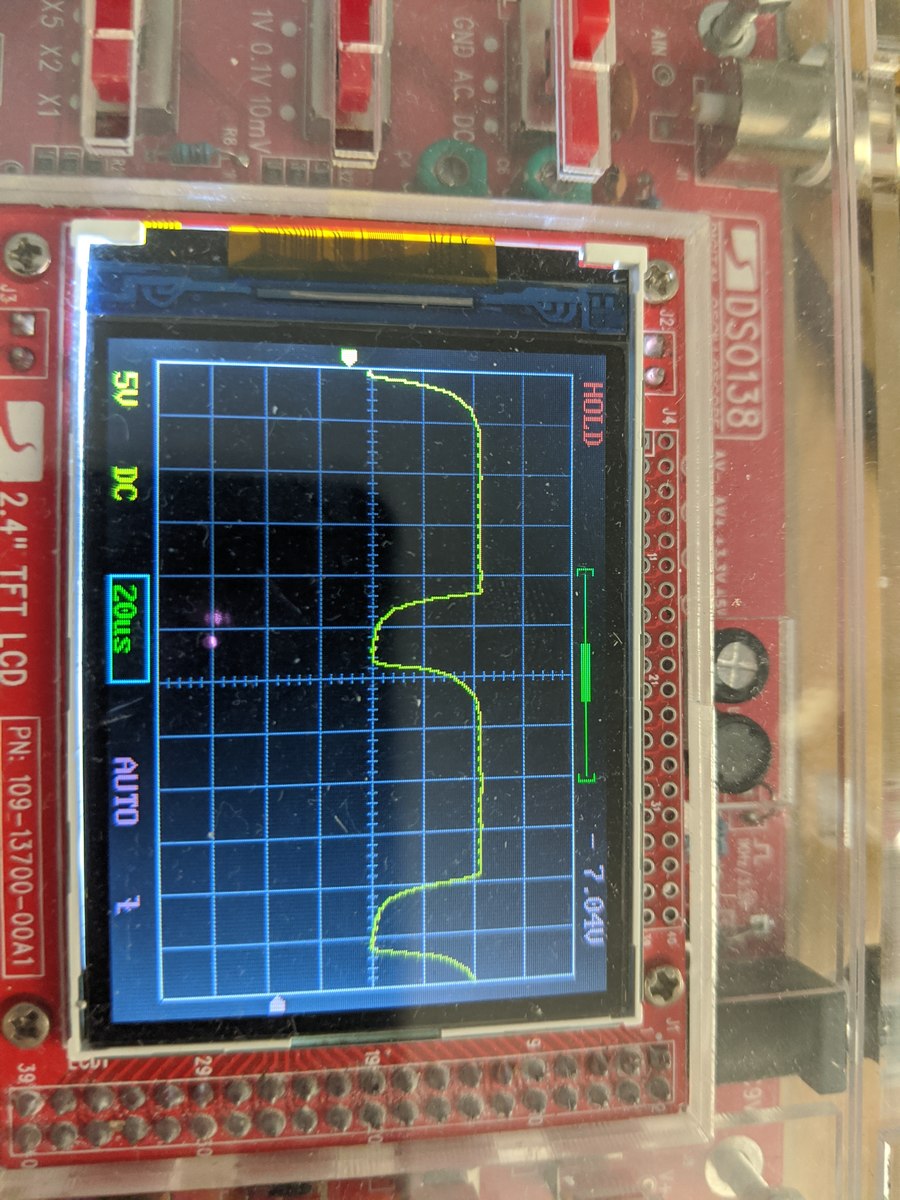
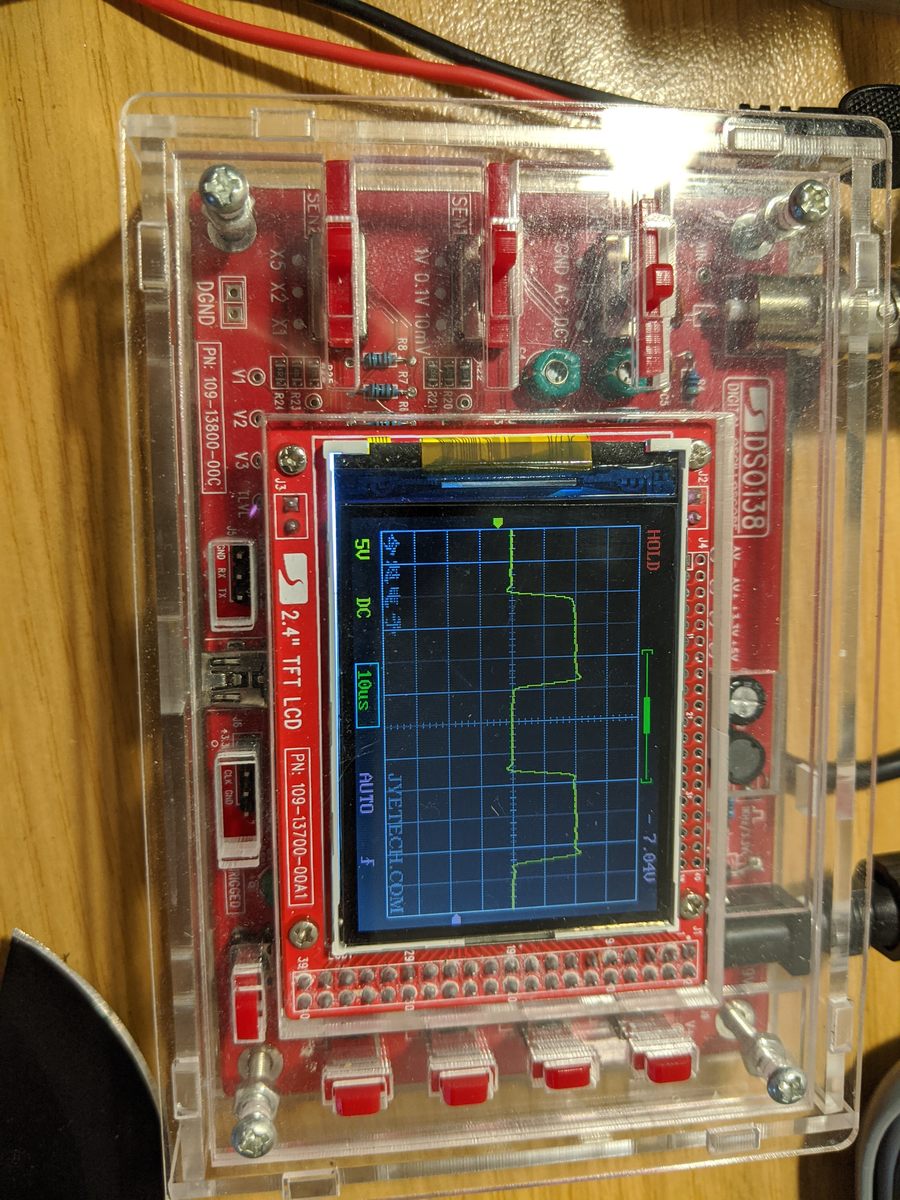
Hi, ich habs jetzt einigermaßen, dass der µ-Controller höhere Frequenzen
ausspuckt, jetzt aber das Problem wie das schon erwartet wurde, dass die
Signale ziemlich stark verzerrt sind.
Bild 1 ist direkt am Mikrocontroller, Bild 2 am Ausgang des Optokopplers
und Bild 3 am Gate des Fets.
Reicht es einfach den Spannungsteiler auszutauschen oder brauche ich
auch einen anderen Optokoppler?
Auf welche Werte soll ich den Spannungsteiler anpassen, momentan sind es
ja noch 16.8k?
Danke und viele Grüße
Peter
Habe jetzt mal bisschen die Widerstände ausgetauscht.
Am Eingang 220 Ohm + IR-Diode vom Optokoppler.
Auf der anderen Seite den Kollektor des Optokopplers an 12V und am
Emitter 1k und 2k in Reihe.
Das Signal bleibt aber immer noch ziemlich stark verzerrt.
Das Ganze geht nur bis 3-4 kHz gut, danach ist so ziemlich Schluss.
Kennt jemand evlt. einen "schnelleren" Optokoppler, am besten auch
DIP-4, wenn es sowas überhaupt gibt.
Viele Grüße
Peter
Peter H. schrieb:> Kennt jemand evlt. einen "schnelleren" Optokoppler, am besten auch> DIP-4, wenn es sowas überhaupt gibt.6N137 (DIP8) ist schon nicht schlecht, auch HCPL2630, der hat 2 OK in
einem DIP-8 Gehäuse.
ich hatte mich auch zuerst mit den Hall Sensoren bei "meinem" Motor
rumgequaelt, und dann einfach mal die Zero Crossing Back EMF Schaltung
aus
https://simple-circuit.com/arduino-sensorless-bldc-motor-controller-esc/
nachgebaut.
Ich kann zumindest sagen, dass sowohl Software als auch Schaltung besser
laufen als der Kram, den ich vorher ausprobiert hatte :)
Vielleicht hilft es dir ja auch...
Hi,
ich habe mir jetzt mal Optokoppler mit Schmitt Trigger gekauft und
getestet.
https://www.tme.eu/de/details/tlp2355-e-t/optokoppler-digitalausgang/toshiba/tlp2355-e-t/
Ich glaube soetwas ist auch der HCPL3120 in dem weiter oben verlinkten
FU.
Ein klein wenig verzerrt ist das PWM Signal am Ausgang leider immer
noch. Und das schon bei ~16 kHz. Ist aber auch denke ich gut möglich,
dass das an meinem momentanen Steckbrett - Aufbau liegt. Oder dass mein
super 12€ Oszi Mist baut.
Beschalten ist der Optokoppler wie im Datenblatt angegeben mit dem 100nF
Kondensator zwischen VCC und GND und ca. 4 mA If an der Diode.
Oder ist das Signal schon gut genug?
Danke und viele Grüße
Peter
Peter H. schrieb:> Anbei noch mein Code, ich musste in den if-conditions die anderen PWM> Ausgänge nur wieder auf 0 Schalten, das war denke ich der Fehler.
Solche lange if/else-Kaskaden mit sich immer wiederholenden Statements
schreien förmlich danach optimiert zu werden. z.B. so:
Peter H. schrieb:> Oder ist das Signal schon gut genug?
Dein kleines DSO wird eine niedrige Grenzfrequenz haben, deswegen kann
man die Steilheit der Flanken nur schlecht beurteilen. Aber gegenüber
den alten Screenies sieht das schon deutlich besser aus.
Eric zeigt dir auch sehr gut, wie man mit einfachen Tabellenkonstrukten
und Definitionen die Software deutlich vereinfachen kann. Mach das.
Wobei die SerialPrints hier so nicht funktionieren, da sie die Schleife
wieder ausbremsen. Besser ist es, die ganze Kommutiererei in Interrupts
zu verlegen.
Ich habe für meinen BLDC/3 Phasen Motor damals diesen Code genutzt und
er funktionierte sehr gut. Vielleicht kannst Du ja daraus etwas
gebrauchen:
https://github.com/cmasenas/3-Phase-Sine-Arduino
Habe dafür damals den DRV8313 genutzt.
Danke Euch schonmal!
Ich werde den Code dann noch mal anpassen, wenn ich neue Platinen da
habe.
Ich hatte heute schon versucht nach dem Optokoppler mit integriertem
Schmitt Trigger versucht noch einen Komparator hinten anzuhängen, der
das Signal noch mehr verzerrt hat. Ich weiss nicht an was das gelegen
hat, evtl. war hier der OPV den ich verwendet hatte (LM358) auch wieder
zu langsam.
Ich denke ich bleibe jetzt nur bei den Optokopplern mit Schmitt Trigger,
16kHz müssten ja eigentlich reichen.
Danke und viele Grüße
Peter
Peter H. schrieb:> war hier der OPV den ich verwendet hatte (LM358) auch wieder> zu langsam.
Der LM358 mag ja für einige Leute immer noch das Nonplusultra bei OpAmps
sein, aber für den Zweck ist er einfach nicht geeignet. Generell hat ein
OpAmp da hinten nichts zu schaffen.
Peter H. schrieb:> ich bleibe jetzt nur bei den Optokopplern mit Schmitt Trigger
Jo, besser is' das.
Hi, also ich habe mal ein wenig versucht den Code anzupassen mit den
External Interrupts. Ich weiss nicht ob der Code jetzt überhaupt Sinn
macht oder einen Vorteil bringt. Das von Eric habe ich leider nicht so
ganz verstanden :-/.
Was mich auch noch ein bisschen wundert ist, dass der 500W China Motor
noch nicht von alleine anläuft, auch wenn meine Netzteile nur 50V / 3A
können. Also die gehen am Anfang nur den Bruchteil von einer Sekunde in
den Constant Current Modus, dann fließen nur 30 mA, erst wenn ich
anschubse fängt alles an und der Strom fließt je nach PWM verhältnis.
Bei einem Verhältnis von 50/50 sind es dann ungefähr 1.5A.
Vielleicht wisst Ihr ja was man noch besser machen kann.
Danke und viele Grüße
Peter
Peter H. schrieb:> lso die gehen am Anfang nur den Bruchteil von einer Sekunde in> den Constant Current Modus, dann fließen nur 30 mA, erst wenn ich> anschubse fängt alles an und der Strom fließt je nach PWM verhältnis.
Dein Bestromungsschema scheint nicht zu stimmen. Die Sektornummer der
drei Sensoren muss so ausgewertet werden, das die Spulen den Motor in
den nächsten Sektor ziehen. Gibst du also nur ganz wenig PWM, solltest
du beim Drehen merken, wie der Motor immer weiter ziehen will. Gibt es
da Aussetzer, stimmt das Spulenschema nicht.
Mach es dir einfacher, indem du aus den drei Sensoren direkt eine Zahl
formst, die als Zeiger in eine Tabelle zeigt. Das spart dir den ganzen
if-then-switch Kram. In der Tabelle steht das Spulenschema.
Das kann aus 0 und 1 bestehen. Für die PWM multiplizierst du dann diese
Zahl mit 0 bis 255 und schickst sie aufs Register.
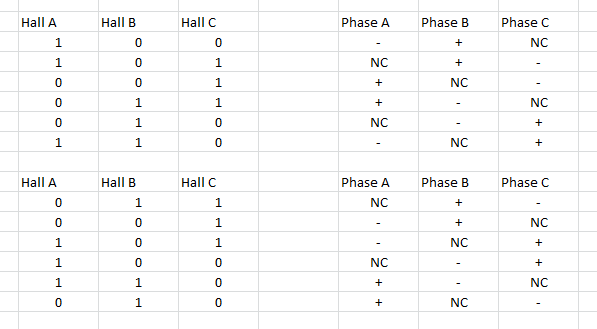
Also ich habe jetzt noch andere Bestromungen durchprobiert, leider
scheinen die auch nicht so ganz zu passen.
Eigentlich sollten doch von der Bestromung her alle BLDC Motoren gleich
funktionieren oder nicht? Oder unterscheiden die sich in der Anordnung
der Hall Sensoren etc.?
Anbei noch 2 von den Bestromungstabellen, die ich probiert habe.
Die beiden lassen z.B. den Motor drehen, man kann ihn aber leicht
anhalten und er läuft nicht wieder von alleine an (Beide lassen den
Motor im Uhrzeigersinn drehen).
Im Internet finde ich gefühlt 100 verschiedene Tabellen.
Muss ich die alle durchprobieren oder gibt es eine "richtige" Tabelle?
Danke und viele Grüße
Peter
Peter H. schrieb:> Oder unterscheiden die sich in der Anordnung> der Hall Sensoren etc.?
Aber klar. Da es keinerlei Standard gibt (und das betrifft sowohl
Sensoranschluss als auch Motorwicklungen), muss das bei jedem Motor
angepasst werden.
Wir hatten sogar schon E-Antriebe fürs Schiff komplett mit Controller,
bei denen uns der Hersteller nicht sagen konnte, welche Leitung des
Motors auf welchen Phasenausgang gehört. Der Typ schlug mir genau die
Testmethode vor, die ich oben gepostet hatte:
> Gibst du also nur ganz wenig PWM, solltest> du beim Drehen merken, wie der Motor immer weiter ziehen will.
Mir ist gerade noch eingefallen, dass ich ja den A200S aus dem VESC
Projekt hier rumliegen habe.
Der Controller stellt über seine Software ein, welchen Phase bei welchem
Hall Sensor am besten passt.
Kann man das irgendwie ausnutzen und das irgendwie nach verfolgen?
Ich habe zur Zeit leider nur dieses 12€ Oszi vom Aliexpress, mein
anderes Hameg mag zur Zeit nicht.
Oder braucht man da etwas anderes dafür?