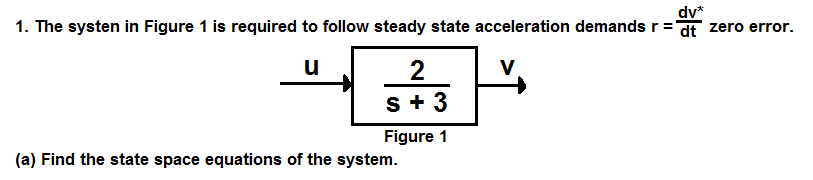
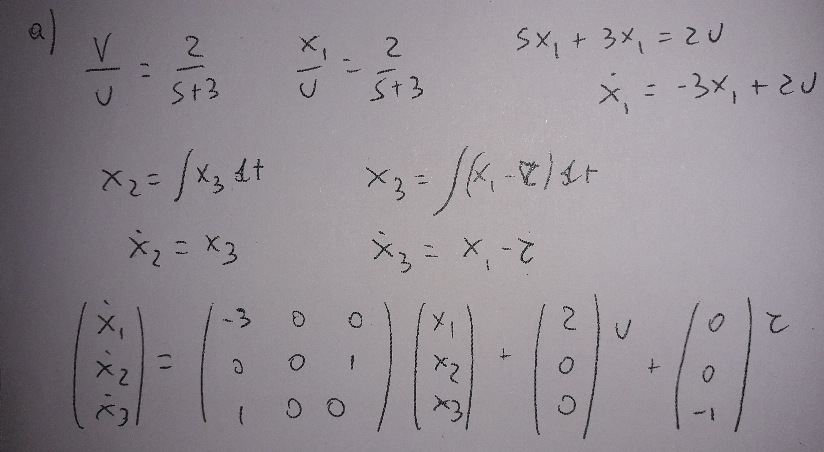
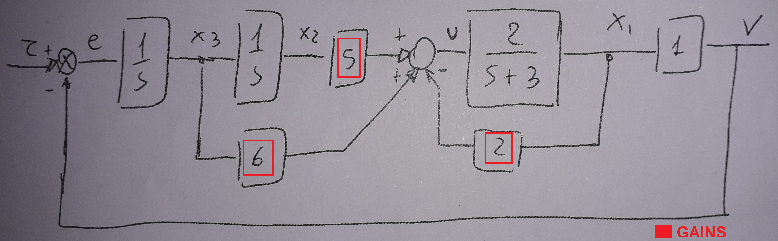
Hallo zusammen. Ich habe hier eine Aufgabe einer Altkausur aus Regelungstechnik 2 und auch die Lösung dazu, allerdings kann ich die Aufgabe nicht nachvollziehen. Die Beschreibung des Systems ist mir einfach zu knapp. Die Aufgabe und Lösung befindet sich in den angehängten Bildern, das Blockdiagramm ist Teil der Lösung einer nachfolgenden Teilaufgabe, ich habe es aber zum Verständnis auch noch dazugepackt. Meine Frage ist: Wie komme ich von der Aufgabenstellung dazu die Systemgleichungen (für diese Aufgabe) aufzustellen? Ich kann die Fragestellung nicht nachvollziehen. "r" steht bei uns immer für Referenz, genau so wird eine Referenz mit einem * angedeutet. Also bedeutet r = dv* / dt wohl dass die Ableitung von dem Zustand v die Referenz ist. Aber wie kommt man durch diesen Hinweis zu einer 3x3 Systemmatrix? Ich hoffe mir kann da jemand weiterhelfen :)
Angehängte Dateien:
-

aufgabe.png
4,1 KB -

loesung.png
460 KB -

blockdiagramm.png
260 KB
Und du bist sicher in der Vorlesung alles verstanden zu haben ? Warst du ueberhaupt in der Vorlesung ?
Joggel E. schrieb: > Und du bist sicher in der Vorlesung alles verstanden zu haben ? "Alles" habe ich in jeder Vorlesung vermutlich tatsächlich nicht verstanden. :) Aber mit allen anderen Altkausuraufgaben komme ich zumindest gut zurecht. Wie gesagt, das Verständnisproblem liegt in der Aufgabenstellung. Wenn das Blockdiagramm erstmal steht ist es natürlich kein Problem die Zustandsgleichungen aufzustellen und in das Zustandsmodell für erweiterte Zustandsmodelle x' = A'x' + B'u + Gr umzuformen. Auch die nachfolgenden Teilaufgaben (Gains berechnen usw.) sind kein Problem. Joggel E. schrieb: > Warst du ueberhaupt in der Vorlesung ? Ja, ich war in jeder Vorlesung. So interpretiere ich die Lösung: Wenn dv/dt die Referenz ist, dann muss sie einmal integriert werden (um den Zustand v zu erreichen) und einmal integriert werden (um zero steady state error) zu gewährleisten. Also gibt es zwei zusätzliche erweiterte Integralzustände. Aber warum geht dann v (-) auf r = dv/dt (+) zurück? Klar, der Ausgang bildet zusammen mit dem Eingang die Rückkopplung (Fehler) der dann vom Regler auf null gesetzt werden soll. Aber müssen dafür die Referenz und der Ausgang nicht die gleiche "Größe" sein? Also entweder beide r = v und Ausgang = v oder r = dv/dt und Ausgang = dv / dt?
Tobias S. schrieb: > Auch die > nachfolgenden Teilaufgaben (Gains berechnen usw.) sind kein Problem. Aus der Aufgabenstellung a) kann man die beiden Integrierer nicht herleiten, imho. Einen ja wg. 'steady state zero error', aber wieso der zweite? Die Aufgabenstellung ist vllt. nicht vollständig (wieder-)gegeben. Cheers Detlef
Detlef _. schrieb: > Tobias S. schrieb: >> Auch die >> nachfolgenden Teilaufgaben (Gains berechnen usw.) sind kein Problem. > > Aus der Aufgabenstellung a) kann man die beiden Integrierer nicht > herleiten, imho. Einen ja wg. 'steady state zero error', aber wieso der > zweite? Die Aufgabenstellung ist vllt. nicht vollständig > (wieder-)gegeben. > > Cheers > Detlef Doch die Aufgabenstellung ist vollständig ,habe es exakt wiedergegeben, ok bis auf das fehlerhafte Systen anstatt System :). Genau diese Aufgabe kam heute in der Klausur mit anderen Werten dran. Habe es natürlich hinbekommen, sind ja nur andere Werte, aber so richtig logisch erscheint es mir auch nicht. Also ich verstehe es so: Der Ausgang ist die Geschwindigkeit und die Referenz eine Beschleunigung. Integriert man die Beschleunigung erhält man die Geschwindigkeit, integriert man das dann nochmal erreicht man den zero steady state error. Oder ist das unlogisch?
Mir erschließt sich der Sinn nicht, Fotos als png zu veröffentlichen.
Alf schrieb: > Mir erschließt sich der Sinn nicht, Fotos als png zu > veröffentlichen. Ich habs halt gerne einheitlich
Gucke es mir zu Hause an. Aber schon mal was von Wirkungsplanalgebra gehört? Vereinfache den RK doch zunächst...
Ich finde die Aufgabenstellung ZRM aufstellen ziemlich eindeutig. Dies dauert 3 Minuten. x2 und x3 kann man direkt ablesen. Mit der x1 ist man nicht viel länger beschäftigt. Insgesamt kannst du dir merken hier sind 3 Integratoren daher auch System 3. Ordnung. Als Zusatz hätte man es noch auf Regelungsnormalform bringen können, damit wenigstens etwas Rechnen dabei ist. Was meinst du mit Referenz? Wenn man eine Geschwindigkeit integriert ist man beim Weg, nur mal zur Info. Über solche Klausuraufgaben hätte ich damals gelacht. Bei uns hätte man erstmal auf Steuer- und Beobachtbarkeit prüfen müssen. Generell ging nichts ohne einmal Lapjunov oder Popov Stabilität berechnen zu müssen PS: Du lässt die Gains von vorn außen vor, daher idt deine Gl. für x1d falsch. x1d = k3x3 + k2x2 - k3x3 mit k1=6, k2 =5 und k3 =2 x2d = x3 x3d = u - x1 v =x1
Die Frage war aber afaik wie man das Blockschaltbild erstellt. In der Aufgabenstellung war nur die Strecke gegeben und steady state error.
Ralph schrieb: > Ich finde die Aufgabenstellung ZRM aufstellen ziemlich eindeutig. > Dies > dauert 3 Minuten. x2 und x3 kann man direkt ablesen. Mit der x1 ist man > nicht viel länger beschäftigt. Liest du diese Werte etwa von der LÖSUNG ab? Das Blockdiagramm ist in der Aufgabenstellung nicht gegeben. Ralph schrieb: > Insgesamt kannst du dir merken hier sind > 3 Integratoren daher auch System 3. Ordnung. Als Zusatz hätte man es > noch auf Regelungsnormalform bringen können, damit wenigstens etwas > Rechnen dabei ist. Du "erklärst" hier Dinge, die gar nicht zur Diskussion stehen. Ralph schrieb: > > Was meinst du mit Referenz? Den Sollwert bzw. die Führungsgröße. Ralph schrieb: > Wenn man eine Geschwindigkeit integriert ist man beim Weg, nur mal zur > Info. Denkst du ernsthaft dass ich das nicht weiß? Und worauf willst du damit jetzt hinaus? > Über solche Klausuraufgaben hätte ich damals gelacht. Bei uns > hätte man erstmal auf Steuer- und Beobachtbarkeit prüfen müssen. > Generell ging nichts ohne einmal Lapjunov oder Popov Stabilität > berechnen zu müssen Es handelt sich hierbei nur um eine Teilaufgabe, und zwar auf die erste Teilaufgabe einer größeren Aufgabe. Wie möchtest du denn auf Beobachtbarkeit, Steuerbarkeit oder Stabilität schließen, ohne überhaupt mal das Zustandsmodell aufgestellt zu haben? In anderen Teilaufgaben mussten wir auch auf Steuer- und Beobachtbarkeit schließen. Anhand der MCF, denn hierbei sieht man auch aufgrund von welchem Modus die eventuelle Nicht-Steuerbarkeit oder Nicht-Beobachtbarkeit resultiert. Und auf Lapjunov Stabilität prüfen zu können ist nichts womit man sich jetzt brüsten müsste. Hatten wir in Regelungstechnik 1 auch. Warum sollten wir es in Regelungstechnik 2 nochmal tun? Ralph schrieb: > > PS: Du lässt die Gains von vorn außen vor, daher idt deine Gl. für x1d > falsch. Das ist die Musterlösung, nicht meine Rechnung. Und das Blockschaltbild bezieht sich nicht auf die erste Teilaufgabe, ich habe es nur fürs bessere Verständnis hinzugefügt. Habe ich allerdings oben schon erwähnt. Ist es denn zu viel verlangt erstmal den Text zu lesen? Habt ihr an deiner Uni oder FH kein Textverständnis benötigt? Der Text den du geschrieben hast erweckt den Eindruck, als hättest du dir nur die Bildchen angesehen. Und dazu noch dieser arrogante Unterton. Wenn das ein Trollversuch war, dann war er allerdings nicht mal schlecht und ich wurde getriggert. Jan schrieb: > Die Frage war aber afaik wie man das Blockschaltbild erstellt. In > der > Aufgabenstellung war nur die Strecke gegeben und steady state error. So ist es.
Könntest du denn was auch finden?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.