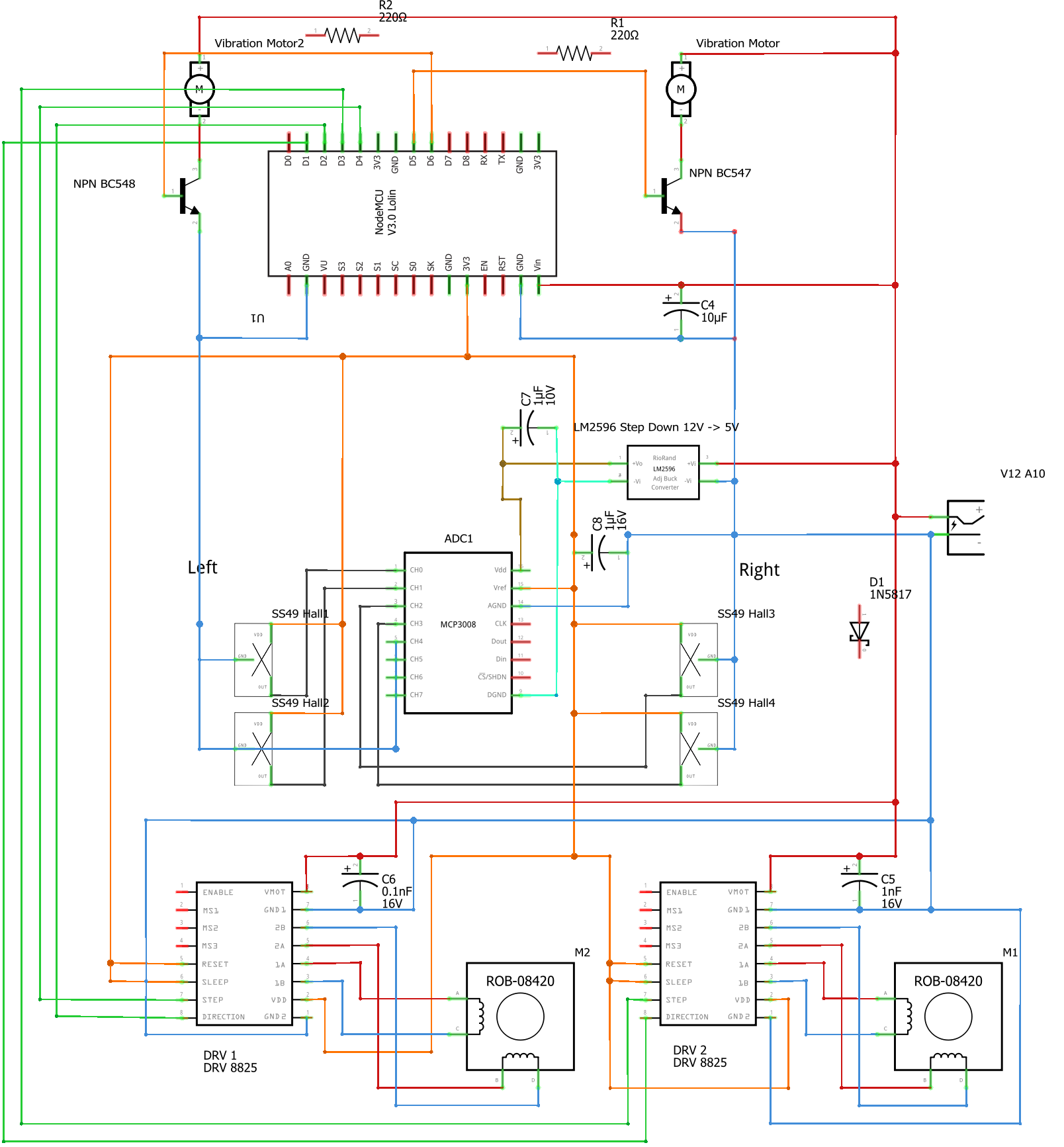
Guten Morgen miteinander. 1. Flyback Diode Motor Die Steppermotoren M1 und M2 werden auf lange Sicht den MCU rösten und möchte flyback Dioden einsetzen um dieses Problem entgegenzusteuern - Sind hierfür 1N5817 geeignet und reicht es jeweils eine Diode neben C5 und C6 einzubauen? - Sollte GND2 von den DRVs lieber direkt an den Ground vom MCU angeschlossen werden? - Ist eine zusätzliche Sperrdiode (siehe D1 neben der Stromquelle) notwendig? 2. Entkopplung der Analog- und Digitalkomponenten Analog und Digitalschaltkreise sollen räumlich getrennt sein, um mögliche Störsignale zu vermeiden. Der LM2596 stellt die Spannung für die Hallsensoren zur Verfügung. Muss hier noch ein weiteres Bauteil (z.b. ein Spannungsregler) eingebaut werden, um die Spannung zu glätten? 3. Weitere Anmerkungen Gibt es noch weitere Anmerkungen Diodden Widerstände die ich in den Schaltplan umsetzen kann? Ich habe mich jetzt mehrere Abende mit der Funktionsweise von Elektrokomponenten und Datenblättern beschäftigt. Dies steht aber leider in keinem Verhältnis zu einem Elektrotechnikstudium oder jahrelanger Erfahrung in der Praxis. Welche Freeware empfiehlt ihr um Schaltungen zu erstellen? Komponenten Microcontroller NodeMCU https://cdn-shop.adafruit.com/product-files/2471/0A-ESP8266__Datasheet__EN_v4.3.pdf UPin_out : 3.3 V - 3.6 V max I_max current draw / pin 12 mA Vin max: 6 - 20 V Vin Recommended: 7 - 12 V ADC1 Analog digital converter : MCP3008 https://www.mouser.de/datasheet/2/268/21295b-72710.pdf *M1 & M2 Bipolar Motor Nema 17 17HS15-1504S-X1* https://www.omc-stepperonline.com/download/17HS15-1504S-X1.pdf IPhase 1.5 A Motor controller DRV8825 http://www.ti.com/lit/ds/symlink/drv8825.pdf https://ecksteinimg.de/Datasheet/Pololu/PO2133.pdf Motor Voltage I: pro Phase max 2.5 A U: 8.2 - 45 V Netzteil 12V 10 A NPN BC547 https://www.mouser.com/datasheet/2/149/BC547-190204.pdf Flyback diode (1N5817): https://www.diodes.com/assets/Datasheets/ds23001.pdf https://www.diodes.com/assets/Datasheets/ds23001.pdf Um R1 und R2 sowie die Vibrationsmotoren kümmere ich mich, sobald der Rest lauffähig ist. Vielen Dank. Gerne auch Antworten zu einzelnen Fragen, alles hilft weiter und mich interessiert das Endergebnis.
Angehängte Dateien:
-

Schaltplan.png
180 KB
Kilian schrieb: > Guten Morgen miteinander. Guten Morgen > 1. Flyback Diode Motor > > Die Steppermotoren M1 und M2 werden auf lange Sicht den MCU rösten und > möchte flyback Dioden einsetzen um dieses Problem entgegenzusteuern Das ist so Falsch. Bei einer Integrierten Vollbrücke brauchst du keine externen Dioden. Die sollten an die Vibrationsmotoren. > - Sind hierfür 1N5817 geeignet und reicht es jeweils eine Diode neben C5 > und C6 einzubauen? völliger schwachsinn da Dioden einzusetzen, aber warum sind C5/6 nur 0.1/1nF groß? da sollten mehrere hundert µF + ca. 100nF Kerko hin. > - Sollte GND2 von den DRVs lieber direkt an den Ground vom MCU > angeschlossen werden? Gnd ja, aber der Leistungs Gnd (an den ISense geht) nicht. > - Ist eine zusätzliche Sperrdiode (siehe D1 neben der Stromquelle) > notwendig? Verpolungsschutz vllt, sonst nicht
Angehängte Dateien:
-

Schaltplan_2.png
180 KB
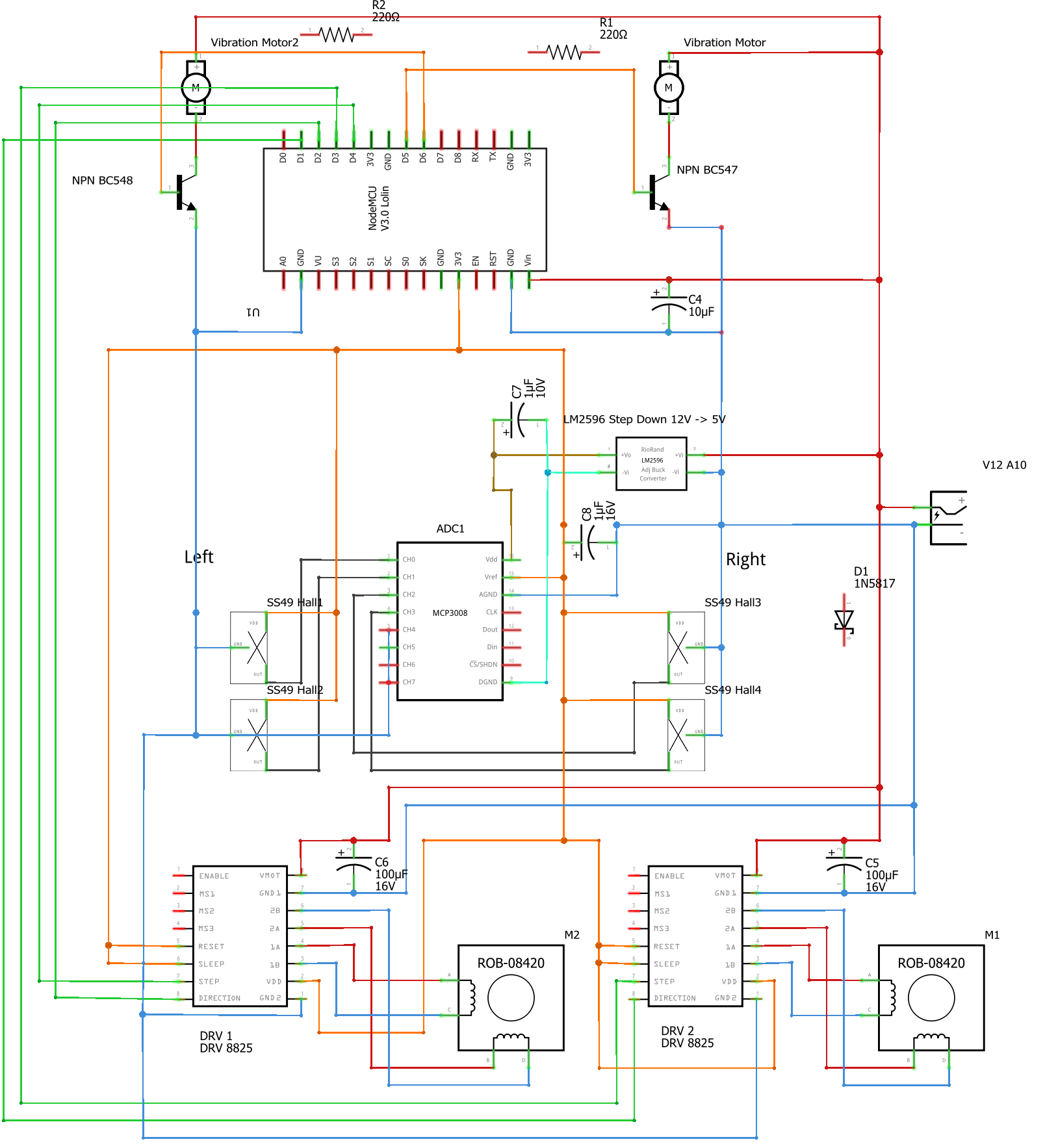
K. S. schrieb: > Guten Morgen > > > völliger schwachsinn da Dioden einzusetzen, aber warum sind C5/6 nur > 0.1/1nF groß? da sollten mehrere hundert µF + ca. 100nF Kerko hin. > >> - Sollte GND2 von den DRVs lieber direkt an den Ground vom MCU >> angeschlossen werden? > Gnd ja, aber der Leistungs Gnd (an den ISense geht) nicht. Vielen Dank. Ich habe die aktualisierte Zeichnung angehängt. Hier habe ich mich tatsächlich in den Einheiten vertan.
Dann nimmst du noch zwei von den Dioden falls du die schon hast (sonst sollte auch was kleines wie eine 1N4148 reichen) als Freilaufdiode über die beiden Vibrationsmotoren. 220 Ohm Basiswiderstand sollten so passen. Fehler am Node MCU: - Du hast Vin und 3V3 verbunden, eine Spannungsversorgung reicht aus. - Du hast 3V3 mit den 5V vom Step Down verbunden. Fehler am ADC: - Du hast Vref mit eienr Spannung aus einem Schaltwandler verbunden, das sollte man auf keinen Fall machen. - Wenn du mehr als eine Handvoll Bit Auflösung möchtest solltest du Analog, Digital und Power GND (und VCC) Sternförmig verlegen und den Analog Teil entweder durch einen Linearregler oder Filter versorgen.
K. S. schrieb: > Dann nimmst du noch zwei von den Dioden falls du die schon hast (sonst > sollte auch was kleines wie eine 1N4148 reichen) als Freilaufdiode über > die beiden Vibrationsmotoren. 220 Ohm Basiswiderstand sollten so passen. Die 1N4148 werde ich morgen bestellen. > Fehler am Node MCU: > - Du hast Vin und 3V3 verbunden, eine Spannungsversorgung reicht aus. > - Du hast 3V3 mit den 5V vom Step Down verbunden. > > Fehler am ADC: > - Du hast Vref mit eienr Spannung aus einem Schaltwandler verbunden, das > sollte man auf keinen Fall machen. > - Wenn du mehr als eine Handvoll Bit Auflösung möchtest solltest du > Analog, Digital und Power GND (und VCC) Sternförmig verlegen und den > Analog Teil entweder durch einen Linearregler oder Filter versorgen. Die 3V3 des MCU fungieren als Output und betreiben die Hallsensoren und sollten im Schaltplan nicht mit den Step Down verbunden sein. Vielleicht ist die Farbgebung unglücklich gewählt. Sternförmig ist notiert. Bei dem Linearregler brauche ich noch einmal deine Hilfe. Diese Bauteile (https://www.conrad.de/de/p/stmicroelectronics-l78s05cv-spannungsregler-linear-typ78-to-220ab-positiv-fest-5-v-2-a-179345.html) scheinen ja nicht zu passen da mindestens eine 8 V Eingangsspannung erwartet wird. Kannst du mir hier bitte eine Typenbezeichnung geben an der ich mich orientieren kann?
Kilian schrieb: > Die 3V3 des MCU fungieren als Output und betreiben die Hallsensoren und > sollten im Schaltplan nicht mit den Step Down verbunden sein. Vielleicht > ist die Farbgebung unglücklich gewählt. Da hab ich wohl eine Verbindung gesehen die es nicht gibt. Kilian schrieb: > scheinen ja nicht zu passen da mindestens eine 8 V Eingangsspannung > erwartet wird. Was ist denn deine Eingangsspannung, am Step down steht 12V-5V. Außer dem ADC versorgt der doch sowieso nichts, aber selbst das könnte Probleme geben, siehe weiter unten. > Kannst du mir hier bitte eine Typenbezeichnung geben an der ich mich > orientieren kann? Fällt eigentlich auch weg da ich mich bei dem Step Down vertan habe. Ein kleiner Filter zu Vref könnte aber nicht schaden, evtl. einige 100µH (z.b. als axial bedrahtete Spule, sieht fast aus wie ein Widerstand) und dahinter einige 100nF nach Gnd. Kannst du aber auch weglassen und erst nachrüsten wenn die Messwerte zu stark schwanken. Das Problem was ich jetzt sehe ist, dass der ADC laut Datenblatt mindestenst 0.7 * Vcc als High Input erwartet. Bei 5V macht das 0.7 * 5V = 3.5V, folglich kannst du den nicht mit 5V versorgen und mit 3.3V ansteuern. Auch weiß ich nicht ob der NodeMCU die 5V vom ADC an seinen Eingängen verträgt. Am besten den ADC auch mit 3.3V Versorgen, der kann doch 2.7V bis 5.5V. Fragen/Anregungen: - Wie willst du das Ganze Aufbauen, Steckbrett, Lochraster, frei verdrahtet oder gleich eine Platine? - Wenn du die 1N5817 schon hast nimm die für die Vibrationsmotoren, die sind auch gut geeignet. - Vertragen die Vibrationsmotoren 12V? - Analog uns Leistungsteil halbwegs getrennt halten reicht völlig aus, am wichtigsten wäre nichts direkt neben die Leitungen vom DRV zum Motor zu legen, sonst ist das relativ unkritisch (ist nur besser es gleich richtig zu machen, aber mach dir nicht zuviel Stress deswegen). - kommen die Hallsensoren mit 3.3V aus? ich habe verschiedene Datenblätter gefunden mit verschiedenen Angaben, welche du genau hast weiß ich natürlich nicht.
K. S. schrieb: > Am besten den ADC auch mit 3.3V Versorgen, der kann doch 2.7V bis 5.5V. Du hast Recht. Die 0.7 Vdd habe ich leider übersehen. Ursprünglich waren die 5V für die höhere Sample Rate angesetzt. 3.3V sollte aber trotzdem reichen. > Fragen/Anregungen: > - Wie willst du das Ganze Aufbauen, Steckbrett, Lochraster, frei > verdrahtet oder gleich eine Platine? Für den Beginn wollte ich alles auf einem Steckbrett aufbauen und dann auf ein Lochraster umsteigen. Da die Breadboards nicht für die Stromstärke ausgelegt sind wird die Stromzufuhr für die Motoren wohl frei verdrahtet werden. Eine Platine ist für die Zukunft angedacht. > - Wenn du die 1N5817 schon hast nimm die für die Vibrationsmotoren, die > sind auch gut geeignet. > - Vertragen die Vibrationsmotoren 12V? Diese beiden Komponenten sind die Einzigen die ich noch nicht bestellt habe. Habe mir aber einen 12V fähigen herausgesucht. > - Analog uns Leistungsteil halbwegs getrennt halten reicht völlig aus, > am wichtigsten wäre nichts direkt neben die Leitungen vom DRV zum Motor > zu legen, sonst ist das relativ unkritisch (ist nur besser es gleich > richtig zu machen, aber mach dir nicht zuviel Stress deswegen). > - kommen die Hallsensoren mit 3.3V aus? ich habe verschiedene > Datenblätter gefunden mit verschiedenen Angaben, welche du genau hast > weiß ich natürlich nicht. Aktuell betreibe ich die Hallsensoren über 3.3V und einem ADS1015 (https://cdn-shop.adafruit.com/datasheets/ads1015.pdf). Die 3.3k Sps im Datenblatt werden aber nur bei einem Sensor im continuose Mode erreicht, wenn mehrere Sensoren sequentiell abgefragt werden reduziert sich dies ganz schnell auf unbrauchbare Geschwindigkeiten. Danke noch einmal für deine Hilfe.
Es gibt Pegelwandler, damit könntest du den ADC bei 5V betreiben. Wenn du sehr viel schnellere brauchst musst du den Chip einzeln kaufen und auf eine Platine setzen (oder eine SMD Adapterplatine im Internet kaufen). Wenns komische Fehler auf dem Breadboard gibt, kontrollier/ wackel an allen Verbindungen, das hilft oft schon. Die BC547 haben als Absolut Maximum Rating 100mA, wenn das nicht reicht such eventuell mal nach Logic level Mesfets, die gibts auch ganz klein in SOT-23 mit einigen Ampere. ich hab z.b. dafür IRLML2502, oder als Motor/Relais Treiber NUD3112 mit integrierter Diode. Sind beide recht billig und z.b. per Mouser Sammelbestellung hier im Forum zu bekommen. Kilian schrieb: > Diese beiden Komponenten sind die Einzigen die ich noch nicht bestellt > habe. Dann nimm die 1N5817, von sowas lohnt es sich auch einige auf Vorrat zu haben (ebeso wie die Transistoren/ Elkos) falls das nicht dein letztes Projekt bleibt. > wenn mehrere Sensoren sequentiell abgefragt werden reduziert sich dies > ganz schnell auf unbrauchbare Geschwindigkeiten. Basiert dein NodeMCU auf einem ESP8266? der hat kein Hardware I2C, das drückt die Geschwindigkeit auch, vor allem da der ADC nichts tut bis der alte Wert ausgelesen und der neue Kanal eingestellt ist. Der MCP3008 hat dagegen SPI und sollte auch über einen Hardware SPI betrieben werden wenns schnell sein soll und einer vorhanden ist. Dann erstmal viel Erfolg und schreib falls du noch Fragen hast.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.