Hallo Leute, ich bin in ein Projekt gelandet in dem ich mit vector CANoe und Matlab arbeiten werde. Ich versuche, eine Kommunikation zwischen den beiden tools herzustellen, aber es gelingt mir nicht. Ist hier jemand, der diese beiden Tools bereits verwendet hat? Grüß Boris
Wie sollen die beiden Programme miteinander kommunizieren? Was/welche Daten soll(en) ausgetauscht werden? CanoOe ist eine Restbussimulation, Matlab (hier wahrscheinlich Simulink?) ist gut für numerische Aufgaben und/oder Systemsimulation. Für mich ist es aktuell die gleiche Frage wie die nach einer Kommunikation zwischen Paint und Outlook.
Hi, mit der Installation der CANoe SW kommt auch ein MatLab Interface mit. In dem Doku Verzeichnis der Vector SW findet sich auch ein Manual. Sobald das Interface installiert ist, kann man auch auf reale Signale und interne Variablen zugreifen. Der Support von Vector ist kostenlos.
Vector bietet sicherlich Trainings an. Bzw support von Vector ist sehr gut. Meist kommt es nicht mehr daran an ob und wie die SW Teile miteinander kommunizieren können, sondern eher ob die Simulation das macht was es machen sollte bzw das Steuergerät darauf so reagiert wie man es erwartet :) Ich vermute, dass dein Matlab simu eine Funktionalität von dem Steuergerät simulieren sollte, und der CANoe halt den Restbus. Damit möchte man am PC alles testen und gucken ob das so tut, bevor jemand das auf ein Steuergerät integriert und dann feststellt, ohh je da kann man den Matlabcode gar nicht richtig debuggen weil die SW lieber weglaufen als in den Spagetti rein zugucken. Und es tut natürlich nicht. Habe ich recht? :)
Das nennt sich real-time or Hardware-In-The-Loop (HIL) simulation mode. Matlab/Simulink simuliert das Fahrzeug, übergibt die Daten an CANoe, das schickt sie zum Steuergerät und empfängt die Ergebnisse, welche dann wieder an Matlab zurückgehen. Im doc-Ordner Deiner CANoe-Installation sollte ein "CANoe AddOn MATLAB® Interface User Guide" liegen, da ist die Vorgehensweise beschrieben.
Beim HiL wird in CanOE eine aus Simulink erzeugte dll eingebunden. Da muss keine Kommunikation aufgebaut werden. Anders wäre es bei Kosimulation, das unterstützt CanOE m.M.n aber nicht. Alles bisherige ist Kaffeesatzleserei. Der TO soll endlich sagen, was für eine Kommunikation er meint!
Angehängte Dateien:
-

forum.PNG
25 KB
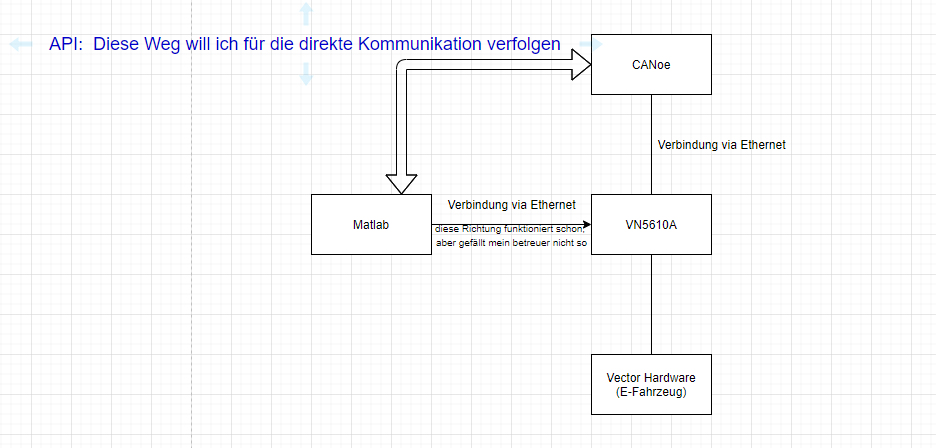
Vielen Dank für eure Beiträge. der erste Ziel meiner Arbeit wäre, dass Matlab/Simulink das Fahrzeug simuliert, dann werden die Daten an CANoe übergeben und das schickt sie zum Steuergerät und empfängt die Ergebnisse, welche dann an Matlab zurückgehen. Das ganze wird nicht mit Simulink gesteuert sondern mit MATLAB-Code. Ich habe schon das CANoe AddOn MATLAB Interface installiert und weißt nicht was ich als nächste machen soll. Danke nochmal für eure Tipps
Eine derartige Kommunikation ist mir nicht bekannt - was nicht heißen soll, dass sie nicht möglich ist. Du kannst den Matlab Code auch als S-Function in Simulink einbetten und dann über den o.g. Weg mit dem Matlab Addon als dll einbinden. Dazu braucht du das Simulink Coder Blockset für den RealTime Workshop. Dann wird alles im CanOE gerechnet. Ist das eine mögliche Lösung für Dich?
Wenn ich es richtig in Erinnerung hab, dann kannst Du mit CANoe über FMI oder FDX Protocol und Localhost IP über TCP/UDP kommunizieren.
Tom schrieb: > Eine derartige Kommunikation ist mir nicht bekannt - was nicht > heißen > soll, dass sie nicht möglich ist. > > Du kannst den Matlab Code auch als S-Function in Simulink einbetten und > dann über den o.g. Weg mit dem Matlab Addon als dll einbinden. Dazu > braucht du das Simulink Coder Blockset für den RealTime Workshop. Dann > wird alles im CanOE gerechnet. > > Ist das eine mögliche Lösung für Dich? Danke für Ihre Rückmeldung. Das ist eine mögliche Lösung. Laut meine Recherche habe ich herausgefunden, dass der CANoe mit Matlab durch DCOM in dem Zustand HIL oder durch der .NET gesteuert werden. Meine Frage jetzt wäre: welche der 3 Methoden * Simulink Coder Blockset für den RealTime * (D)COM * .NET wäre am besten dies zu steuern und was sind die Vor und Nachteile davon? Ich wünsche euch ein schöner Valentinstag und ich würde mich gerne auf eure Rückmeldungen freuen.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.