Hi, bin auf der Suche nach passenden Bauteilen um ein kleines Segelboot (ca. 3m Länge) mithilfe von Servomotoren zu steuern. Es soll einer Art (technisch/soziales) Experiment werden. Also bitte keine Infragestellung von Sinnhaftigkeiten dieses Vorhabens bzw. Umsetzbarkeit aus der Sicht der Segel- Technik/Philosophie. Zunächst wären nur 2 Servos notwendig. Für das Ruder und den Segeltrimm. (Später vielleicht noch ein drittes, für eine Gewichts/Ballast-Verlagerung). Ich kann mich einfach nicht entscheiden, ob Schrittmotor oder Getriebemotor. Die Präzision eines Schrittmotors ist nicht wirklich notwendig. Wobei die Möglichkeit die Anzahl der Schritte vorzugeben verlockend erscheint. Oder eben ein Getriebemotor. Der soll dann einfach so lange in eine Richtung laufen, bis der Sensor die gewünschte Stellung meldet. Es gibt solche 24V Motoren, mit einer Wellendrehzahl von 25 oder 30 U/m. Und 5 - 15 Nm. Für das Ruder würden 5 Nm ausreichend sein. Für Segeltrimm etwas mehr. So ein 15 Nm Teil z. B. https://www.conrad.de/de/p/doga-gleichstrom-getriebemotor-do25837103b00-3028-do-258-3710-3b-00-3028-24-v-5-a-15-nm-25-u-min-wellen-durchmesser-1-198176.html Ich weis es echt nicht. Das ganze würde ich gerne über USB an ein Laptop anschließen, welches sich um die gesamte Steuerung kümmern soll. (Laptop, weil da noch low latence Videostream und sonstiges Zeug weiter verarbeitet werden soll. Ansonsten wären das noch die Nema Schrittmotoren. Haben die Dinger wirklich so viel Drehmoment aus dem Stillstand und ohne Untersetzung?
Fedor K. schrieb: > Für das Ruder würden 5 Nm ausreichend sein. Für Segeltrimm etwas mehr. > So ein 15 Nm Teil z. B. Ich habe keine Vorstellung davon welches Drehmoment die Motoren haben, aber wie wäre es mit Scheibenwischermotoren bzw. Motoren für den Fensterantrieb aus dem Auto?
Fedor K. schrieb: > Haben die Dinger wirklich so viel Drehmoment aus dem Stillstand Bei Schrittmotoren ist es eher umgekehrt. Die haben ein hohes Halte-/Drehmoment im Stillstand und bei höherer Schrittfrequenz nimmt das Drehmoment ab. Das hängt von der Motorspannung ab. Die Drehmomentkurve findet sich gewöhnlich im Datenblatt des Motors.
Nimm sowas: https://www.radiosailing.de/technik/rc-technik/150-2001-leistungsstarke-segelwinden-aus-powerservos-im-eigenbau und bau Dir einen Servotester aus einem Arduino. Den hängst Du an den Laptop.
Fedor K. schrieb: > Nema Schrittmotoren. Eher nicht. Wenn nicht allzu rasante Ruder und Winch-Verstellung nötig ist, würde ich beides mit Scheibenwischermotoren erledigen. Rückmeldung der Ist-Position über Potentiometer, also klassische Moddllbauservoschaltung, nur leistungsfähiger. Man braucht eh eine Seiltrommel. Und einen 12V Akku. Wie jedoch der Laptop überleben soll ist mit schleierhaft, selbst bei Süsswasser.
Danke! Ich schaue mich gerade nach Wischermotoren um. Da wäre doch ein Kontroller (arduino) notwendig + ein Motortreiber? Wie funktioniert das? Also für NICHT Schrittmotor. Da ist doch eine Leistungselektronik notwendig. Was könnte man da nehmen? Noch ein kleines Detail: die Steuerung soll über WebSocket laufen. Direkt aus dem Browser. Und die ganze Elektronik, inkl. Laptop, wollte ich in einer Wasserdichten Metallkiste unterbringen. Metall, weil wärmeleitend.
Fedor K. schrieb: > Und die ganze Elektronik, inkl. Laptop, wollte ich in einer > Wasserdichten Metallkiste unterbringen. Metall, weil wärmeleitend. Fedor K. schrieb: > (Laptop, weil da noch low latence Videostream und sonstiges Zeug weiter > verarbeitet werden soll. Ich hoffe für dich da soll nichts per Funk aus der Metallkiste ungefähr auf Wasserlinie mehr als nen halben meter weit gehen. Fedor K. schrieb: > Das ganze würde ich gerne über USB an ein Laptop > anschließen, welches sich um die gesamte Steuerung kümmern soll. da gibts viele Optionen, nen Arduino/STM/Pic müsstest du selber programmieren, IO-Warrior z.b. wäre fertig mit einfachen digitalen Ein/Ausgängen, aus dem CNC-Bereich gibt es Steuerungsboards für Schrittmotoren inklusive software für den PC. Zum Motorproblem: Was kannst du, Programmiertechnisch als auch mechanisch und wie sieht dein Budget aus? Billig (aber "kompliziert"): Arduino/STM32/Pic... + DC Motor (Mosfet, Diode und fertig ist die Ansteuerung) und Sensor, musst halt alles mehr oder weniger selber programmieren. Wenn du Motoren gebraucht besorgst und deine Arbeitszeit nicht abrechnest kostet dass keine 50€. Einfach aber teuer ist CNC Kontroll Board, Schrittmotortreiber, Schrittmotor und fertig, kann aber schnell ein paar mehr hundert Euro kosten, rechne mal so mit knapp 400-500. Dafür hast du Software auf dem PC, fertige Steuerung und wenn du was von z.b. PoLabs nimmst eine Schnittstelle für eigene Software auf dem PC (bei anderen bestimmt auch).
Direkt aus der Metallkiste sicherlich nicht. Das mit der Funkübertragung werde ich als nächsten Schritt "konzipieren". Zur Not, kommt eine nachgeführte/stabilisierte Patchantenne an die Mastspitze. Das Budget ist im Rahmen der Vernunft unbegrenzt, solange es der Umsetzung zugute kommt. Die paar Hundert EUR würden da keine Rolle spielen. Programmiertechnisch bin ich Hauptberuflich tätig. Das schreckt mich erstmal nicht ab. Also doch Schrittmotor und CNC? Das war etwas, was ich auch favorisiert hatte, nur dass eine Präzision auf dem Niveau von CNC ziemlich übertrieben erscheint, hat ich nachdenklich gemacht. Mit sowas hatte ich nie zutun gehabt.
guck dir mal das hier an: https://www.poscope.com/product/pokeys57cnc/ hat ne eigene Software, eine Bibliothek für eigene Software sowie eine offene Spezifikation des Protokolls. Fedor K. schrieb: > Also doch Schrittmotor und CNC? Das war etwas, was ich auch favorisiert > hatte, nur dass eine Präzision auf dem Niveau von CNC ziemlich > übertrieben erscheint, zwingt dich ja keiner auf den 1/256 Schritt genau zu steuern. Das wäre halt etwas was es fertig gibt, und es ist sehr modular wodurch du Motoren/Treiber tauschen bzw. aufrüsten kannst wenn nötig. Wenns kein <50€ Projekt werden soll erleichtert das halt vieles, da die Hardware steht, sicher funktioniert und Software support hat.
Fedor K. schrieb: > rogrammiertechnisch bin ich Hauptberuflich tätig Erstaunlich, dass es immer Programmierer oder Lehrer sind, die so vollkommen weltfremde Vorstellungen haben. Du möchtest also ein 3m Segelboot (wohl eher eine Jolle, selbst der Optimist ist 2,30m lang) per WebFrontend Fernbedienung nur mit Winsch und Ruder steuern. Kommt dir nicht der leiseste Zweifel, dass das vollkommener Schwachsinn ist ? Du könntest genau so versuchen, ein (Automatik)Auto nur mit Lenkrad und Gaspedal per WebFrontend zu steuern.
Fedor K. schrieb: > Also doch Schrittmotor und CNC? Das war etwas, was ich auch favorisiert > hatte Mal wieder typisch: "Ich warte solange, bis einer genau das sagt was ich hören will. Alle anderen die das Gegenteil sagen ignoriere ich." Aber es ist dein Projekt, also viel Erfolg :-)
MaWin schrieb: > Du möchtest also ein 3m Segelboot (wohl eher eine Jolle, selbst der > Optimist ist 2,30m lang) per WebFrontend Fernbedienung nur mit Winsch > und Ruder steuern. Naja, ein AA (Artificial Arsch) wird ja wohl eingeplant sein, dann geht das schon. Das Teil finde ich viel spannender als die Motoren. Außerdem, was ist mit einem Vorsegel oder wie schaut der Kahn aus?
MaWin schrieb: > Du möchtest also ein 3m Segelboot (wohl eher eine Jolle, selbst der > Optimist ist 2,30m lang) per WebFrontend Fernbedienung nur mit Winsch > und Ruder steuern. Interessant wirds wenn er damit auf einem öffentlichen Gewässer eine Kollision verursacht.
MaWin schrieb: > Du könntest genau so versuchen, ein (Automatik)Auto nur mit Lenkrad und > Gaspedal per WebFrontend zu steuern. Wenn man beim Auto noch die Bremse dazu nimmt dann ist es ja sogar noch einfacher. Nur sollte jemand vor Ort da sein, der das Fahrzeug auftankt, an eine geeignete Stelle platziert und den Motor anlässt. Mit schnellem Fahren wird es sicherlich nichts. Da wäre eine Signalverzögerung von paar Hundert Millisekunden sehr störend. Aber ohne sichtbare Umwelteinflüsse, wäre es doch etwas zu öde. Bauform B. schrieb: > Naja, ein AA (Artificial Arsch) wird ja wohl eingeplant sein, dann geht > das schon. Das Teil finde ich viel spannender als die Motoren. Außerdem, > was ist mit einem Vorsegel oder wie schaut der Kahn aus? Klar wird jemand dabei sein. Falls sich herausstellt dass es auch anderes geht, dann vielleicht auch ohne Besatzung. Es soll aber nicht wie ein Modellboot aussehen. Wenn jemand drauf sitzt, dann kann man sich sicher sein, dass kein Spielzeug ist. ;o) Den Kahn gibt es noch nicht. Das ist praktisch frei wählbar. Mit einem Vorsegel, wollte ich erst mal nichts zutun haben. Ein paar Gedanken über die Umsetzung habe ich mir schon gemacht. Ob das so ein Sportgerät wird wie der Laser o.ä. bin ich mir noch nicht sicher. Für die ersten Versuche wäre etwas schweres, mit kleinem Segel sinnvoll. Um einfach mal alles ohne Stress austesten und optimieren zu können. Etwas zackigeres dann vielleicht später ... Udo S. schrieb: > Interessant wirds wenn er damit auf einem öffentlichen Gewässer eine > Kollision verursacht. Also das wäre ehr das Problem des AA. Und das ganze wird auch nicht in Europa betrieben. Sondern irgendwo wo es hell und warm ist, während es in Europa kalt und dunkel ist.
Fedor K. schrieb: > Also das wäre ehr das Problem des AA. Und das ganze wird auch nicht in > Europa betrieben. Sondern irgendwo wo es hell und warm ist, während es > in Europa kalt und dunkel ist. Solange der Fahrzeugführer nicht in Europa sitzt...
Hier ist endlich mal ein Wischermotor, bei dem eine Drehmomentangabe dabei steht. 40 U/m und 30 Nm ist aber eine Menge für Scheibenwischer. Von den Angaben her, würde es geeignet sein. Ist es etwas brauchbares? https://www.pkwteile.at/bosch/7885828?gclsrc=aw.ds&&gshp=1&gclid=Cj0KCQiAm4TyBRDgARIsAOU75sqSI0ViZzkQE-DyVrjGYl5KKwnOKR0SkM4MAWm_EHhAlfjPVeMeTicaAt5-EALw_wcB
Ist wahrscheinlich auch ein LKW Scheibenwischer. 12V gibts im PKW Bereich ja nicht. IP50 Schutzklasse.. Also kein Schutz gegen Spritzwasser etc. Ansonsten sieht er gut aus. Braucht auch keine LIN-Ansteuerung oder so. Jetzt brauchst noch einen Encoder um den Drehwinkel feststellen zu können, ein Motorsteuerung(H-Brücke) und eine Regelung (Arduino?). Wie soll die Anbindung zu deinem Websocket geschehen? Raspberry Pi?
Das wird wohl Arduino sein. Hatte damit noch nichts Zutun. Zu WebSocket sind ein paar Sachen für Arduino zu finden. Was auch immer das ist. Muss ich mir genauer anschauen. https://shawnhymel.com/1675/arduino-websocket-server-using-an-esp32/ Ob das Boot selbst der WebSocket Server sein sollte, oder auch ein Client, der zum Server verbindet ... mal sehen. Ansonsten würde sowas dazu passen? https://www.reichelt.at/arduino-grove-encoder-grv-encoder-p191181.html?PROVID=2788&gclid=CjwKCAiAvonyBRB7EiwAadauqbBi7l881QI7u-1FEzmEPnSYkvKMMlyl2gEbwDMM3G1o5YKKj5VIKRoCNDIQAvD_BwE&&r=1 MotorDriver: https://www.ebay.de/itm/Dual-Motor-Driver-Module-Board-H-Bridge-DC-MOSFET-IRF3205-3-36V-10A-Peak-30A-/172430164155
Was ist ein Regenerativ Motor Treiber? https://www.robotshop.com/de/de/sabertooth-dual-12a-6v-24v-r-c-regenerativ-motor-treiber.html Aus der Artikelbeschreibung: ... speziell für den Einsatz in ferngesteuerten Fahrzeugen optimiert wurde. Er eignet sich für mittelschwere Roboter, Autos und Boote. PS: Zwei dieser Wischermotoren sind bestellt. Gnade mir Gott ...
Mit Arduino würde ich mich an deiner Stelle anfreunden. Jedenfalls bei deinem Projekt. Was du verlinkt hast ist ein Beispiel wie man mit dem ESP32 µC und der Arduino IDE einen Webserver erstellt. Der ESP32 µC ist zwar von der Hardwareseite aus kein original Arduino, ist aber mittlerweile weit verbreitet und lässt sich mit der Arduino IDE programmieren. Er ist außerdem viel leistungsfähiger als die auf Atmels ATmega µC basierenden Original-Arduinos. Außerdem hat er eben einen Netzwerkstack und WLAN. Für dich also optimal. Den Encoder, den du verlinkt hast ist eigentlich als Eingabe-Encoder gedacht. Je nach Professionalität deines Vorhabens ist der sicher für das proof of concept irgendwie verwendbar, aber ich meinte eigentlich einen Encoder der auf der Welle des Motors sitzt. Musst dich mal umschauen bzw. eine Codierscheibe selbst anfertigen. Die Motor-Dual-H-Brücke, die du verlinkt hast, habe ich auch schon mal eingesetzt. Du wirst bei dieser definitiv noch die MOSFETS beider H-Brücken mit einem Kühlkörper kühlen müssen. Aber Achtung: Du musst den Kühlkröper elektrisch isolieren, da du sonst einen Kurzschluss verursachst, wenn du alle vier MOSFETs an einen Kühlkörper verbindest.
Aha. Dachte ESP32 wäre irgendwas erweiterndes für Arduino. Der ESP32 könnte man also statt dem original Arduino verwenden? WLAN ist weniger nützlich, drahtlose Verbindung mit dem Festland sollte der Hauptrechner übernehmen. Es müsste irgendwas mit Ethernet sein. Sowas hier? https://www.amazon.de/ESP32-POE-Espressif-verdrahtetem-100MBit-Ethernet/dp/B07GD31J3X/ref=asc_df_B07GD31J3X/?tag=googshopde-21&linkCode=df0&hvadid=310491639325&hvpos=1o4&hvnetw=g&hvrand=11758347142859313181&hvpone=&hvptwo=&hvqmt=&hvdev=c&hvdvcmdl=&hvlocint=&hvlocphy=1030974&hvtargid=pla-570983284209&psc=1&th=1&psc=1&tag=&ref=&adgrpid=59900935617&hvpone=&hvptwo=&hvadid=310491639325&hvpos=1o4&hvnetw=g&hvrand=11758347142859313181&hvqmt=&hvdev=c&hvdvcmdl=&hvlocint=&hvlocphy=1030974&hvtargid=pla-570983284209 Welches mit dem hier verwendet werden kann? https://www.amazon.de/AZDelivery-NodeMCU-Development-Nachfolgermodell-ESP8266/dp/B071P98VTG/ref=sr_1_3?__mk_de_DE=%C3%85M%C3%85%C5%BD%C3%95%C3%91&keywords=esp32&qid=1581597152&s=ce-de&sr=1-3
Wäre dieses Netzteil dafür geeignet, die Motoren testweise anzutreiben? https://www.amazon.de/Aluminiumgeh%C3%A4use-LED-Netzteil-Transformator-Treiberadapter-LED-Lampenstreifen-NL300-H1V24/dp/B07HSY4TM9/ref=pd_aw_sbs_60_1/258-8952945-8163853?_encoding=UTF8&pd_rd_i=B07HSY4TM9&pd_rd_r=79eaac04-6aed-4b2f-b7e0-8fa0114cea6d&pd_rd_w=nDk3j&pd_rd_wg=u6Ffd&pf_rd_p=ac232abb-3e3c-4b3b-be24-e4d61fe1b75e&pf_rd_r=4MK6QG47W50YMP2WY4X9&psc=1&refRID=4MK6QG47W50YMP2WY4X9
Fedor K. schrieb: > Aha. Dachte ESP32 wäre irgendwas erweiterndes für Arduino. Der ESP32 > könnte man also statt dem original Arduino verwenden? Nee, der kann zwar auch nur als WLAN-Bridge verwendet werden, um einen Arduino Nano oder so ans Netz zu bringen, aber du kannst den auch direkt so programmieren, dass er direkt deine H-Brücken (und damit deine Motoren) ansteuert. Fedor K. schrieb: > WLAN ist weniger > nützlich, drahtlose Verbindung mit dem Festland sollte der Hauptrechner > übernehmen. Es müsste irgendwas mit Ethernet sein. Ja, kannst den ja z.b. mit deinem Hauptrechner über WLAN verbinden und dein Hauptrechner ist dann über LTE/Satellitenverbindung? mit dem Festland verbunden. Das DevBoard aus dem ersten Link hat den ESP32 doch schon. Da brauchst den doch nicht nochmal (zweiter Link) Wichtig ist nur, dass er genügend IOs hat. Du bruachst ja mindestens 2x PWM + 2x Direction für die H-Brücke und dann noch die Signale von deinen Encodern/Absolutwertgebern (je nachdem wie du die Verdrehung/Winkel von deinen Motoren feststellen willst) Fedor K. schrieb: > Wäre dieses Netzteil dafür geeignet, die Motoren testweise anzutreiben? Keine Ahnung? Auf deinem Segelboot wird es doch kein 230V geben, oder? Oder meinst du nur zum testen? Musst halt schauen ob der Strom ausreicht. bei 300W /24 V also etwas mehr als 12,5A. Ich denke, dass sollte zum Testen ausreichen. Ich weiß aber nicht, was auf deinem Boot später für Drehmomente verlangt werden und wie hoch dementsprechend der Strom durch die Motoren sein wird.
Danke! Ich habe jetzt 4 verschiedene Mikrocontroller bestellt, 3 verschiedene Motortreiber, inkrementale Drehgeber/Encoder usw. Arduino UNO ist auch dabei. Einfach mal zum Kennenlernen. Mal sehen, ob das ESP32-POE-ISO Board die ganze Regelung übernehmen kann, wäre ja optimal. Das Netzteil soll natürlich nur dazu dienen die Motoren im Versuchsaufbau in Betrieb zu nehmen. Habe jetzt einen anderen gefunden, 360 Watt und ist noch günstiger. Auf einen schweren Akku + Ladegerät verzichte ich erstmal. Die Verbindung ans Land wird wohl über Mobilfunk, LTE realisiert. Die Leistung der Antennen auf den Sendemasten könnte man ja hier gut gebrauchen.
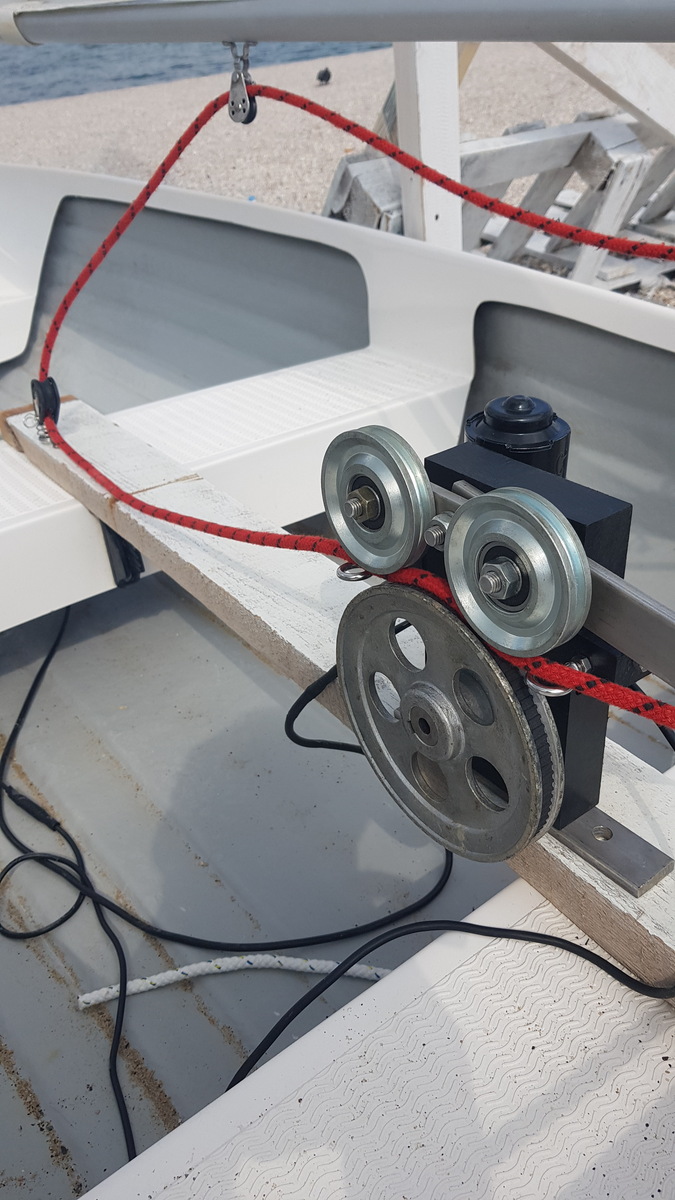
Falls es noch jemanden interessiert ... es sind jetzt genügend Komponenten zusammen gekommen, um den Versuchsaufbau provisorisch in Betrieb zu nehmen. Manches wird direkt aus China versendet, das ist ja schon ein Ding ... die richtigen/schmaleren Zahnriemenscheiben + Zahnriemen sind noch nicht da. Ob die noch ankommen ... Erst dann kann die Servo-Konstruktion vollendet werden. Momentan bestehen die Riemen aus gefaltetem Tesafilm. Das ganze läuft auf dem Mega 2560, da dieser mehr als genug Pins/PWM's/Interrupts für alles bietet. Auf dem Laptop läuft der Websocket-Server unter Java/Spring Boot. Darin wird auch per USB die Verbindung zum Controller aufgebaut um die Steuerkommandos zum Controller weiter zu leiten oder die Telemetrie vom Controller zu empfangen und an den Web-Client weiter zu geben. Der Laptop befindet sich in einer Windscribe-VPN mit statischer IP. Auf dem Laptop ist auch ein Browser-Fenster geöffnet, in dem die Kamera und Mikrofon angezapft werden. Bild und Ton werden über WebRTC an den Web-Client gesendet. Das ist eine Google Firebase App. Die Latenz der Bildübertragung ist überraschend kurz, und das mit LTE. Die Bildqualität ist nicht so herausragend, liegt aber eher an der integrierten Kamera. Wer Lust hat, kann die Steuerung ausprobieren. Ich habe auf die Schnelle, ein Steuerungsinterface zusammengeschustert. Wichtig ist nur, dass die Seite "wiretome.de:16933" vom Client aus erreichbar ist. Das ist der Websocket-Server auf meinem Laptop innerhalb der VPN. Wenn ein OK erscheint, dann sollte es klappen. Unter https://servo.frontlooper.net läuft der Client. Dort müsste der Button zur Anforderung der Kontrolle erscheinen. Dann hat man eine Minute Zeit die beiden Servos zu steuern. Nach 10 Sekunden Nichtaktivität wird die Session vorzeitig gecancelt. Ansonsten, wenn bereits jemand die Servos steuert, erscheint die Wartezeit bis man selbst mit der Steuerung an der Reihe ist. Audio wird ebenfalls übertragen, man kann also das Geräusch der PWM-Signale hören. Die linke Maustaste über dem Steuerungsrechteck gedrückt halten und schieben. Die kurzen roten Linien zeigen die Telemetriedaten des Kontrollers/der Motoren. Das sind die Positionsdaten, die über Websocket, live zurück vom Controller ankommen. Das sollte somit schneller sein, als das Videobild. Es sei denn, es treten irgendwelche Lags auf, was ich gerade noch teste. Ansonsten, danke für die nützlichen Tipps! Jetzt fängt hier an, irgendwas zu funktionieren ...
Ich wollte nur noch darum bitten, falls jemand das hier https://servo.frontlooper.net ausprobiert hat, und irgendwas nicht funktionierte, einfach hier kurz melden. Immerhin handelt es sich hierbei um mehr oder weniger die Funktionsfähigkeit des Kernprinzips der ganzen Idee. Thx!
MaWin schrieb: > Fedor K. schrieb: >> rogrammiertechnisch bin ich Hauptberuflich tätig > > Erstaunlich, dass es immer Programmierer oder Lehrer sind, die so > vollkommen weltfremde Vorstellungen haben. Erstaunlich, dass es immer MaWins sind, die die dümmsten Kommentare ever hier im Forum absondern. > Kommt dir nicht der leiseste Zweifel, dass das vollkommener Schwachsinn > ist ? Warum? Es ist vollkommener Schwachsinn. Warum sollte man das anzweifeln? Mit deinem Deutsch scheint es nicht so weit her zu sein. Oder bist du einfach nur hohl?
Angehängte Dateien:
-

20210904_142036.jpg
240 KB -

20210904_142041.jpg
230 KB

Die Sache wird konkreter ...
Super, da bin ich mal gespannt ... halt uns auf dem Laufenden und nicht demotivieren lassen durch destruktive Kommentare. Viel Glück und cheers
Angehängte Dateien:
-

20210906_124530.jpg
230 KB -

20210909_173243.jpg
240 KB -

20210921_182129.jpg
240 KB -

20210922_172228.jpg
240 KB



Nach und nach kommen die Teile zusammen. Manches war schwerer zu bohren als gedacht. Da musste schweres Gerät ran ;o) https://www.youtube.com/watch?v=rRXIkuUfX5w
Angehängte Dateien:
-

20211002_152605.jpg
240 KB

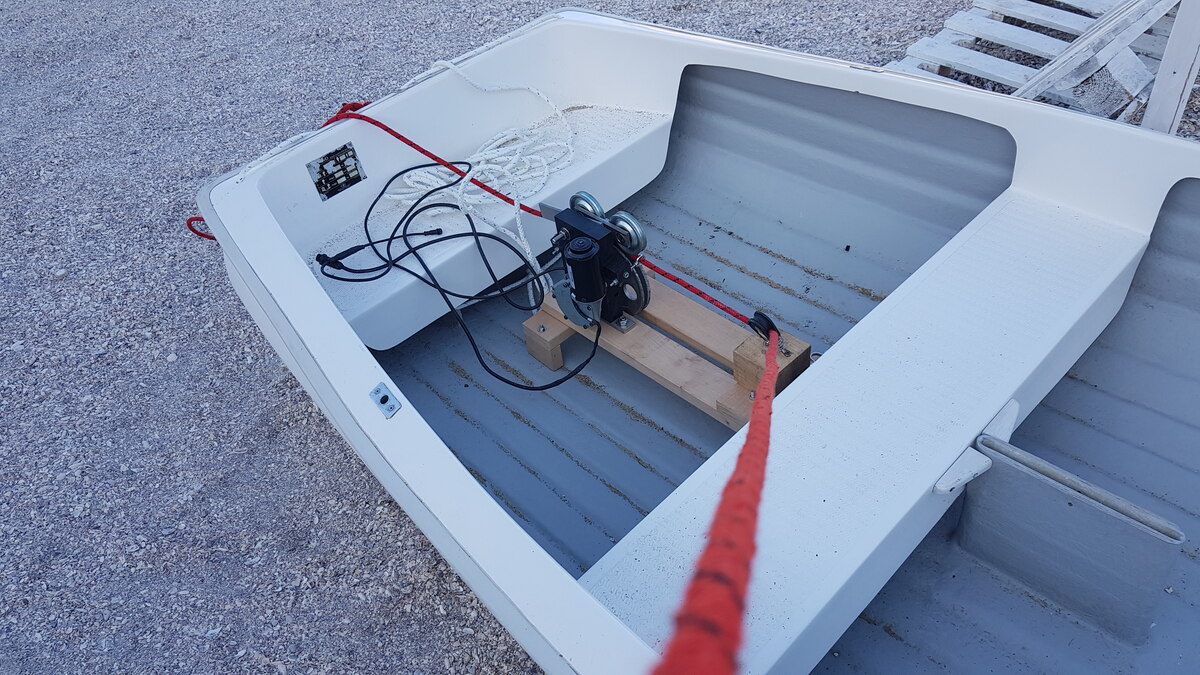
Habe jetzt endlich alles zusammengesteckt. Erstmal provisorisch, außerdem ist geeignetes Wetter für einen realen Einsatz erstmal nicht in Sicht. Meter hohe Wellen für die nächsten Tage. Hier kann man mit dem Ruder und der Schot spielen. Es gibt aber momentan keine Logik für die Reihenfolge der Sessions. Wer als letzter reinkommt, der bekommt die Kontrolle. Der vorherige wird rausgeworfen. So jedenfalls die Theorie ... Take control Button klicken ... https://frontlooper.net
Sebastian schrieb: > Tut nix? > > LG, Sebastian Sollte. Nach dem Klicken des Buttons sollte sich alles bedienen lassen. Links Ruder, rechts Winsch.
Fedor K. schrieb: > Take control Button klicken ... Die Mittenlage des Ruders scheint verstellt zu sein ;-)
Tolles Projekt! Zumal es zumindest auf dem Trocknen ja funktioniert. Gratulation, Rainer
Tja, der eine Strand ist jetzt wohl vermint ... Hoffentlich nicht lange ...
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.