Hi, Habe es gerade geschafft 2 H-Brücken (L298n) in Feuer aufgehen zu lassen, war zwar auch interessant sollte aber nicht mein erstes Projekt mit dem Arduino werden... Hatte eigentlich vor damit 2 schrittmotoren anzutreiben. Zu meinem Aufbau: Habe jeweils die 2 Windungen der Schrittmotoren an die Ausgänge von dem L298n angeschlossen und die In 1-4 an einen Arduino Uno angeschlossen.Gestern Abend hatte ich ein paar Versuche gemacht und das Ganze mit einem Handy Ladegerät (5V max 1 A) betrieben. Hat auch alles halbwegs funktioniert nur haben die Motoren ziemlich gestottert. Jetzt habe ich heute morgen hier im Forum gelesen, das, dass "Netzteil" unterdimensioniert sein könnte. Also habe ich gerade ein Netzteil mit 24 Volt und 15 Ampere direkt an die H Brücke angeschloßen was aber leider innerhalb von Sekunden dazu geführt hat das die komplette Wohnung in Rauch stand /steht. Die Motoren: Sind Nema 23 Hersteller-Teilenummer: 23HS45-4204S * Motortyp: Bipolar * Schrittwinkel: 1.8 Grad. * Haltemoment: 3.0Nm(425oz.in) * Nennstrom/Phase: 4.2A * Phasen-Widerstand: 0.9ohms * Stromspannung: 3.78V * Induktivität: 3.8 mH±20%(1KHz) Die H Brücke : driver ...L298N driver power supply...+5 V to +35 V driver output current (max.) ...2 A logic power output Vss ...+5 V to +7 V (internal supply +5 V) logic current... 0-36 mA controlling level ...low: -0.3 V to 1.5 V, high: 2.3 V-Vss enable signal level ....low: -0.3 V to 1.5 V, high: 2.3 V-Vss max. power...25 W working temperature... -25 °C to +130 °C dimensions ... 69 x 56 x 36 mm Netzteil: Eingangsspannung 100-120VAC und 200-240VAC Eingangsfrequenz 50/60hZ Ausgangsspannung 24V Summenstrom 15A Einstellbereich der Ausgangsspannung 24V±10% Abmessungen 210*115*50mm Gewicht 1100g Ich weiß, daß ich irgendwas ganz gravierend falsch gemacht habe... Also ihr könnt euch gerne über meine Blödheit oder meinen mangelnden Sachverstand lustig machen, würde mich aber trotzdem freuen wenn mir jemand helfen könnte. Meine Frage: Was brauche ich für ein Netzteil? Oder was habe ich am Aufbau falsch gemacht?
Johannes schrieb: > Was brauche ich für ein Netzteil? Jedenfalls sicher nicht ein 360W(!) Netzteil beim zweiten Versuch. Vermutlich hast du da zwei Endstufen überlappend eingeschaltet - deswegen hats beim USB Netzteil geruckelt (Kurzschluss für ein paar ms) und beim dicken Netzteil dann die Treiber dahingerafft. Ich würde übrigens davon ausgehen, das auch die Portpins am AVR Schaden genommen haben. Johannes schrieb: > Oder was habe ich am Aufbau falsch > gemacht? Wie sollen wir das wissen, hier am anderen Ende des Internet? Weder Aufbau noch Software sind ja bekannt.
Johannes schrieb: > Ich weiß, daß ich irgendwas ganz gravierend falsch gemacht habe Natürlich. Der L298 begrenzt nicht von sich aus den Strom. Es fehlt bei dir offenbar der L297 Stromregler und Chopper. Deine Motoren ziehen 4.2Arms schon bei 3.72Vrms, sind also vom L298 mit seinen schwachen 2Apeak (1.4Arms) nicht zu versorgen. Bei 24V fliesst ca. 27A pro Spule, also das 14-fache was der L298 überlebt nur dein Netzteil begrenzt vorher. Dir fehlt es an Grundlagen, und zwar ganz weit vorne. Merke: Wer einen Arduino in der Hand hat, ist noch lange kein Experte. Für 4.2Arms Motore braucht man 6A stromregelnde Mikroschritt-Treiber wie https://www.omc-stepperonline.com/de/dm860s-de.html Dann geht auch dein Netzteil, da ein Motor 4,2*3,72*2 = 31 Watt zieht, der Treiber vielleicht 80% Wirkungsgrad hat also 40W vom Netzteil, das reicht also für 9 Motoren.
MaWin schrieb: > Merke: Wer einen Arduino in der Hand hat, ist noch lange kein Experte. Pruust :-) Der Tag ist gerettet :-P
Angehängte Dateien:
-

aufbau.jpg
300 KB
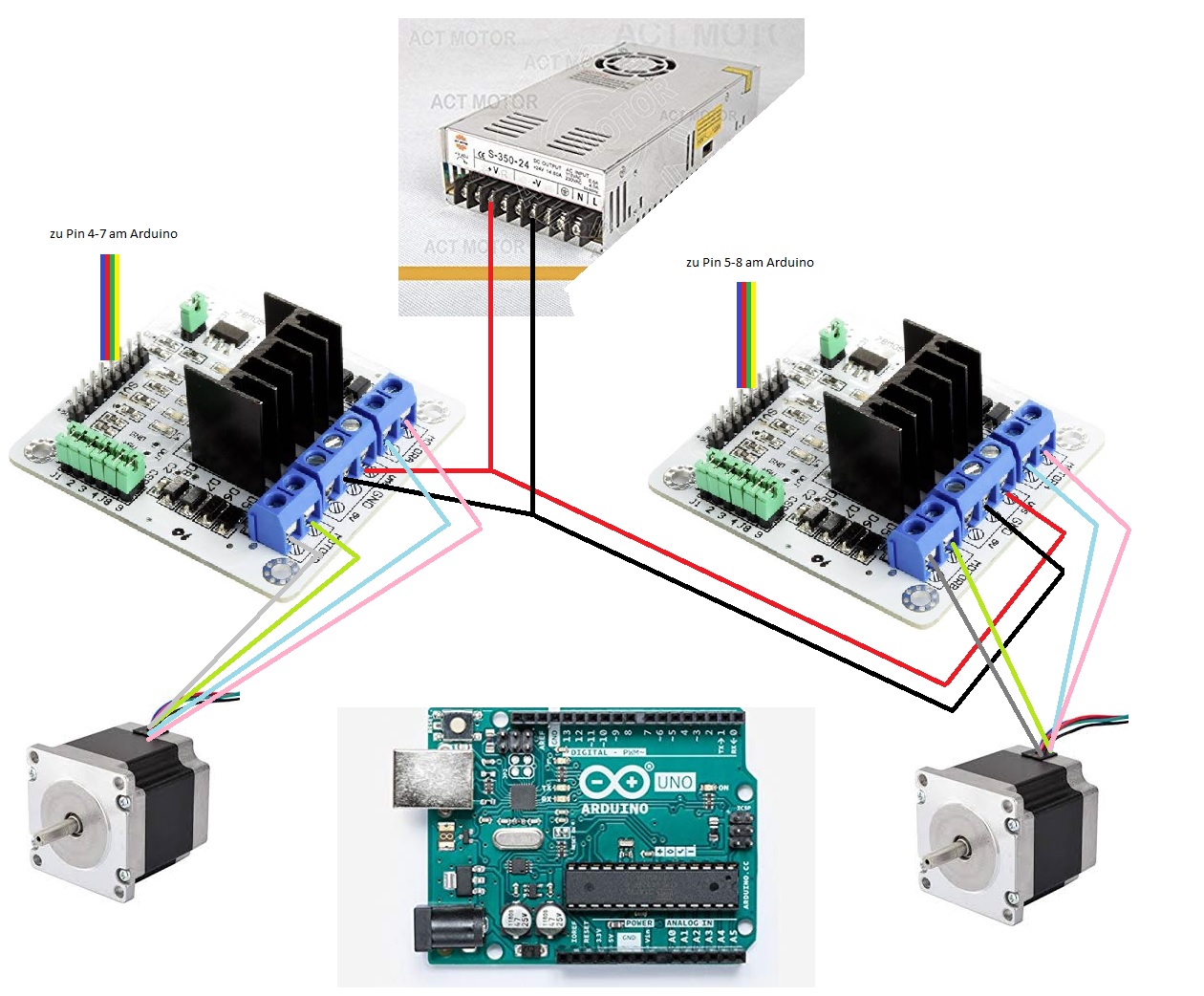
Matthias S. schrieb: > Wie sollen wir das wissen, hier am anderen Ende des Internet? Weder > Aufbau noch Software sind ja bekannt. damit du nicht zu meiner Seite des Internets kommen musst, habe ich meinen Aufbau mal schematisch dargestellt und hier der Code: #include <Stepper.h> const int stepsPerRevolution = 200; // change this to fit the number of steps per revolution // for your motor // initialize the stepper library on pins 8 through 11: Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11); Stepper myStepper2(stepsPerRevolution, 4, 5, 6, 7); void setup() { // set the speed at 60 rpm: myStepper.setSpeed(95); myStepper2.setSpeed(95); // initialize the serial port: Serial.begin(9600); } void loop() { // step one revolution in one direction: Serial.println("clockwise"); myStepper.step(-50); myStepper2.step(400); delay(1000); }
Matthias S. schrieb: >> Merke: Wer einen Arduino in der Hand hat, ist noch lange kein Experte. Ach was soll der Geiz... das Dingen ist so teuer wie ne Schachtel Marlboro... Aber danke für deine Hilfe, ich weiß das ich überhaupt keine Ahnung von dieser Materie habe, finde diese Technik trotzdem super interessant. Habe mich gestern Abend richtig gefreut, als sich die Motoren, nach bestimmt 5 Stunden arbeit so gedreht haben wie ich wollte... Werde gleich nocheinmal eine schematische Zeichnung machen, wie ich deinen Beitrag verstanden habe. Würde mich freuen wenn du dir das dann nochmal angucken könntest...
Ich behaupte mal die 5V neben den 24V vergessen anzuschließen. Da machen die Treiber sofort einen Abflug.
Hi Stephan, das habe ich nicht ganz verstanden, könntest du dir eventuell oben die Zeichnung nochmal angucken und mir sagen was du damit meintest? hatte das bei diesem Treiber so verstanden, das es 2 Möglickeiten gibt den Treiber mit strom zu versorgen entweder über den VMS anschluss mit dem Jumper 5V_En eingesteckt oder direkt über die 5 Volt..
Stephan schrieb: > Heist im Datenblatt vom L298 Vs. Vss! > Die MUSS vor den 24V anliegen! > Sonst > Baddabumm. Davon steht im Datenblatt nichts.
Johannes schrieb: > finde diese Technik trotzdem super interessant Dann bilde dich weiter: http://www.dse-faq.elektronik-kompendium.de/dse-faq.htm#F.10
Matthias S. schrieb: > Vermutlich hast du da zwei Endstufen überlappend eingeschaltet - Das kann man nicht. Ein Eingang ist für die eine Halbbrücke, der andere für die andere. Stephan schrieb: > Ich behaupte mal die 5V neben den 24V vergessen anzuschließen. Da machen > die Treiber sofort einen Abflug. Wer sagt das? Im Dabla steht nichts davon. Stephan schrieb: > Heist im Datenblatt vom L298 Vs. Die MUSS vor den 24V anliegen! Sonst > Baddabumm. Wenn dann Vss, und nein. Johannes schrieb: > 2 Möglickeiten gibt > den Treiber mit strom zu versorgen entweder über den VMS anschluss mit > dem Jumper 5V_En eingesteckt oder direkt über die 5 Volt.. Da musst du den Schaltplan des Moduls und das Dabla des Chips befragen. Mein Tip ist auch: zuviel Strom durch das Modul, da ungeregelter quasikurzschluss. Z.B. auch, weil der Arduino im Stillstand (also während der Wartezeit) die Endstufen aktiv lässt... Und Dioden fehlen evtl., aber dazu reicht ein Blick in den Schaltplan des Moduls. Und noch so einige andere Tips, die hier schon gegeben wurden: Belastbarkeit, Stromchopper, sowas.
Angehängte Dateien:
-

Vs.jpg
140 KB
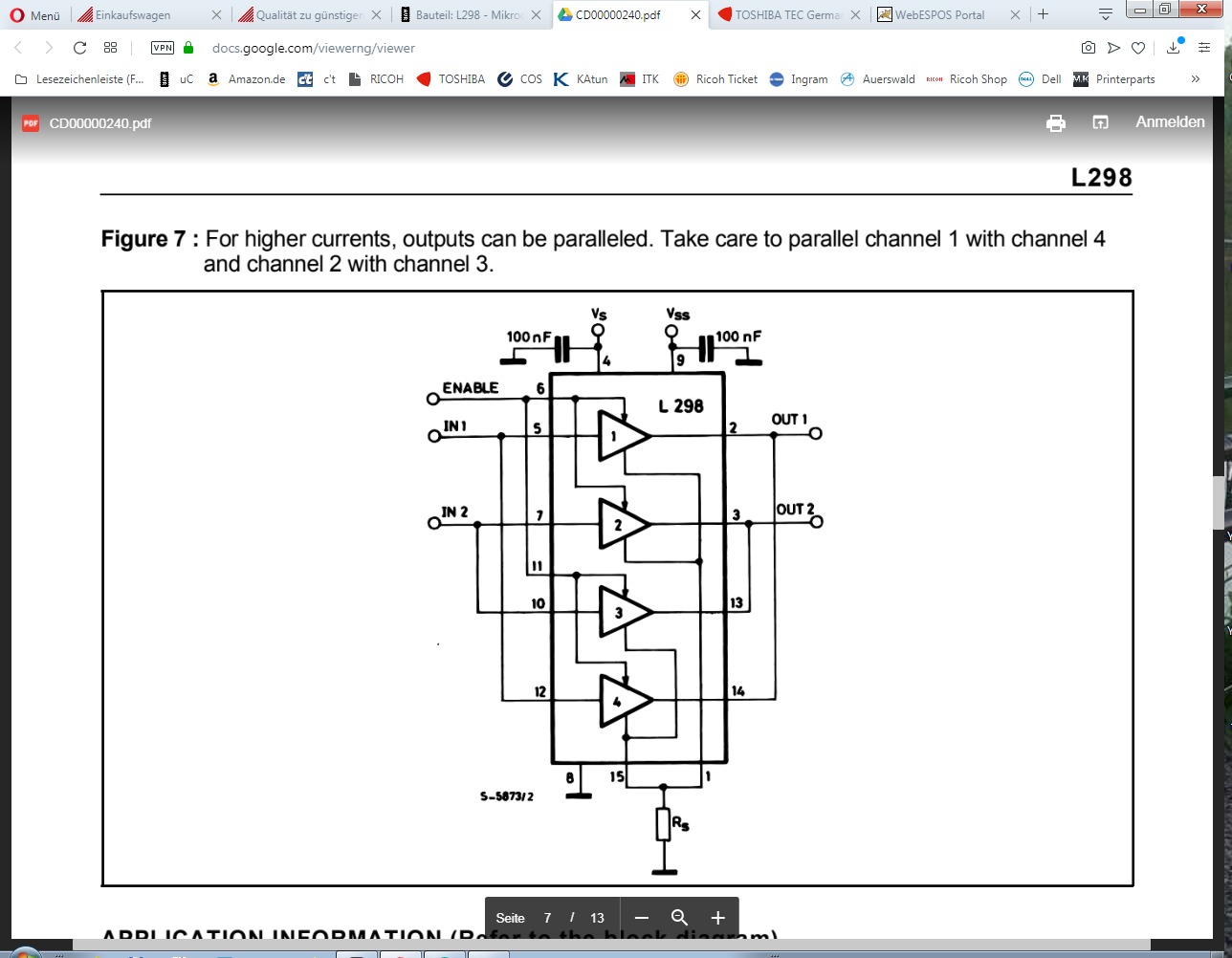
hinz schrieb: > Vss! ja ist im Datenblatt doof dargestellt. Vss ist auf der Leistungsseite dargestellt....mein Fehler.
Johannes schrieb: > 2 H-Brücken (L298n) Kannst du mir den Entscheidungsgrund für diese Brücken verraten?
https://www.conrad.de/de/p/makerfactory-l298n-dual-h-bruecke-schrittmotor-treiber-modul-1612779.html?WT.mc_id=google_pla&WT.srch=1&ef_id=EAIaIQobChMItaTp1sXi5wIVA-WaCh298wdeEAQYBSABEgKKHvD_BwE:G:s&gclid=EAIaIQobChMItaTp1sXi5wIVA-WaCh298wdeEAQYBSABEgKKHvD_BwE&hk=SEM&s_kwcid=AL!222!3!367270211499!!!g!! Die Baugruppe von Conrad. Die Anschlüsse für die Sense Pins sind zwar raus geführt, das war es aber auch. Wie man sowas mit einer solchen Beschreibung verkaufen kann ist mir unklar. Kein Hinweis auf eine nötige Stromregelung oder Begrenzung.
Wenn du einen 8V Schrittmotor mit einer BS von 8V betreibst, geht das schon. Außerdem steht das im Datenblatt. Fig.8 und Fig.10 mit den L297/L6506 sind doch eindeutig.
Nur, weil man es in diesem Schaltplan nicht erkennen kann: ist da die Masse vom Andruiden auch mit der Masse der Leistungsslektronik verbunden? Und wie wird der Andruide versorgt? Ich vermute sehr, dass die 5V-Variante eigentlich schon "funktioniert", aber wegen des fehlenden Massebezugs eben geruckelt hat...
Angehängte Dateien:
-

IMG_20200221_131213.jpg
230 KB -

IMG_20200221_131207.jpg
240 KB
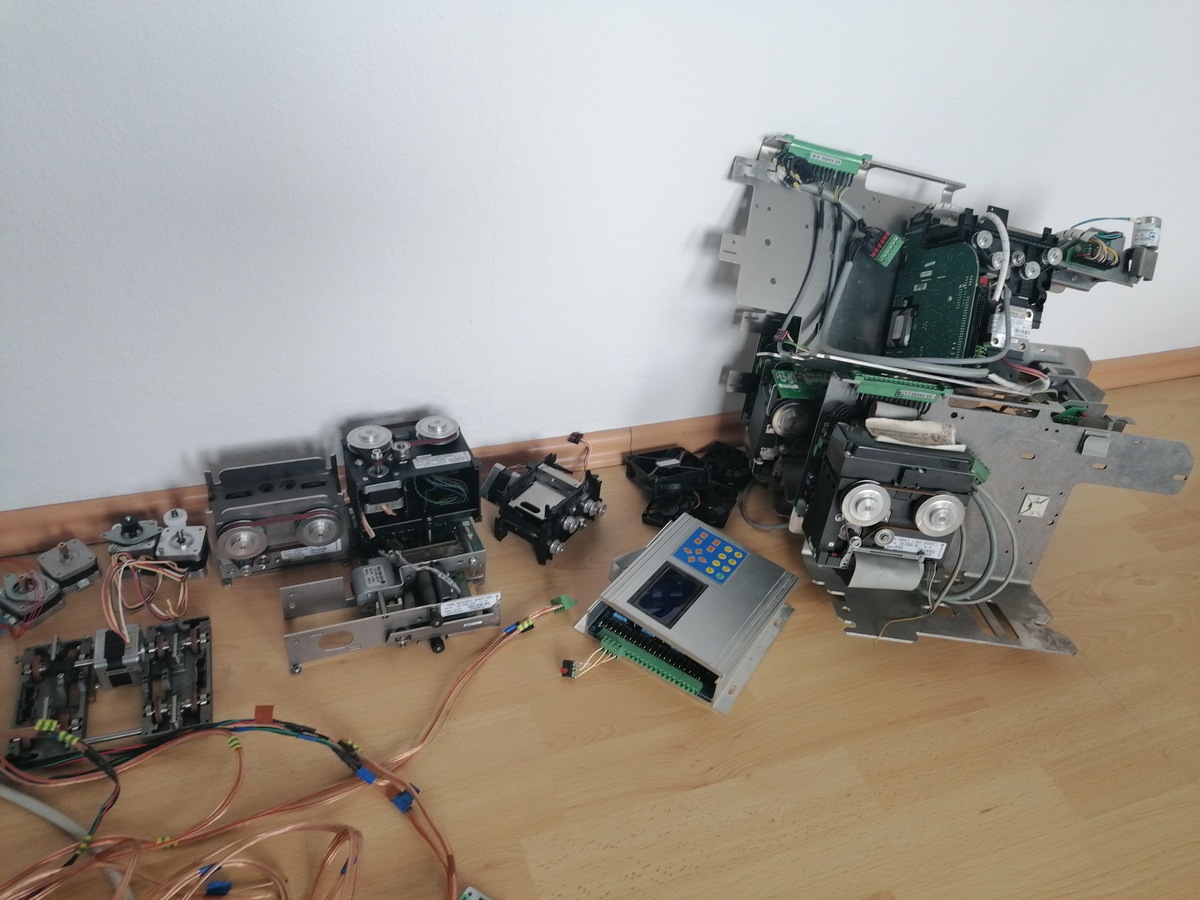

Tany schrieb: > Johannes schrieb: > 2 H-Brücken (L298n) > > Kannst du mir den Entscheidungsgrund für diese Brücken verraten? Hatte ein ganzes Konvolut an Teilen bei ebay Kleinanzeigen gekauft und im gleichen Zug noch 3 ausrangierte Ticketautomaten aus einem Parkhaus. Insgesamt waren das 70€... Nur den arduino Uno musste ich neu kaufen... Habe mich ein bisschen übers Ohr ziehen lassen und mir so ein starter kit andrehen lassen... (im Prinzip nur die Platine ca 8€ und der Rest ist mE Ramsch... Und das für 90 €)
Lothar M. schrieb: > Ich vermute sehr, dass die 5V-Variante eigentlich schon "funktioniert", > aber wegen des fehlenden Massebezugs eben geruckelt hat... Hi Lothar, was meinst du mit fehlendem Massebezug? Hatte den Treiber wie in der Abblidung oben angeschlossen...
Johannes schrieb: > IMG_20200221_131207.jpg Da liegt doch ein scheinbar geeignter Treiberbaustein, wie kommt man dann auf den L298 ? Bloss weil er der allerbilligste Schrott war den man bei irgendeinem Ramschhändler erstehen konnte ?
Da ist ein vernünftiger Treiber dabei, warum den nicht benutzen? Für Schrittmotorsteurung gibt's schon Firmware dazu. https://github.com/gnea/grbl
Johannes schrieb: > Hatte den Treiber wie in der Abblidung oben angeschlossen... Also genau 8 Leitungen zwischen Andruide und Leistungselektronik? Keine Verbingung vom Arduino-GND zum Motortreiber-GND? Was ist auf den restlichen offenen 4 Pins auf der Logikseite der Motortreiber, wenn da an den 8 Pins nur 4 Signale (blaurotgrüngelb) angeschlossen sind?
Angehängte Dateien:
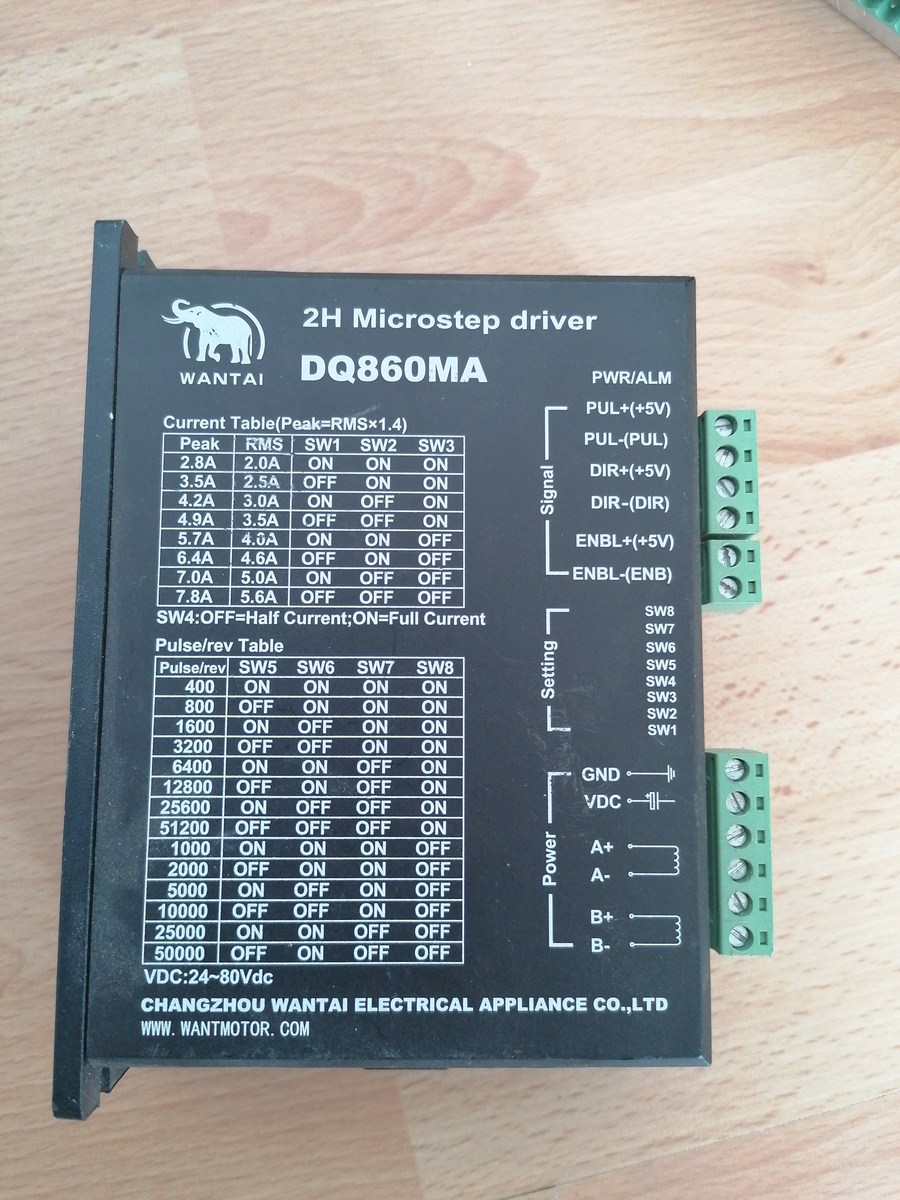
MaWin schrieb: > Für 4.2Arms Motore braucht man 6A stromregelnde Mikroschritt-Treiber wie > https://www.omc-stepperonline.com/de/dm860s-de.html Habe gerade mal nach dem Datenblatt geschaut von dem Treiber den ich zur Verfügung habe DQ 860 MA Treiber: Input voltage. 24-80VDC Input current. < 6A Output current. 2.8A~7.8A Consumption:80W; Internal Insurance:10A Working Temperature -10~45℃; Stocking temperature -40℃~70℃ weight. 600GS Netzteil: Spannung. 60V Spannungstoleranz. +/-1% Nennstrom. 5.85 A Strombereich. 0-5.85A Spannungsspannung. (Max): 240mVp-p Nennleistung. 350 W Nennleistung. 86% Könnte ich den Motor mit diesem Netzteil und diesem Treiber betreiben? Kann ich die Spannung über das Potentiometer (links) runterregulieren?
Angehängte Dateien:
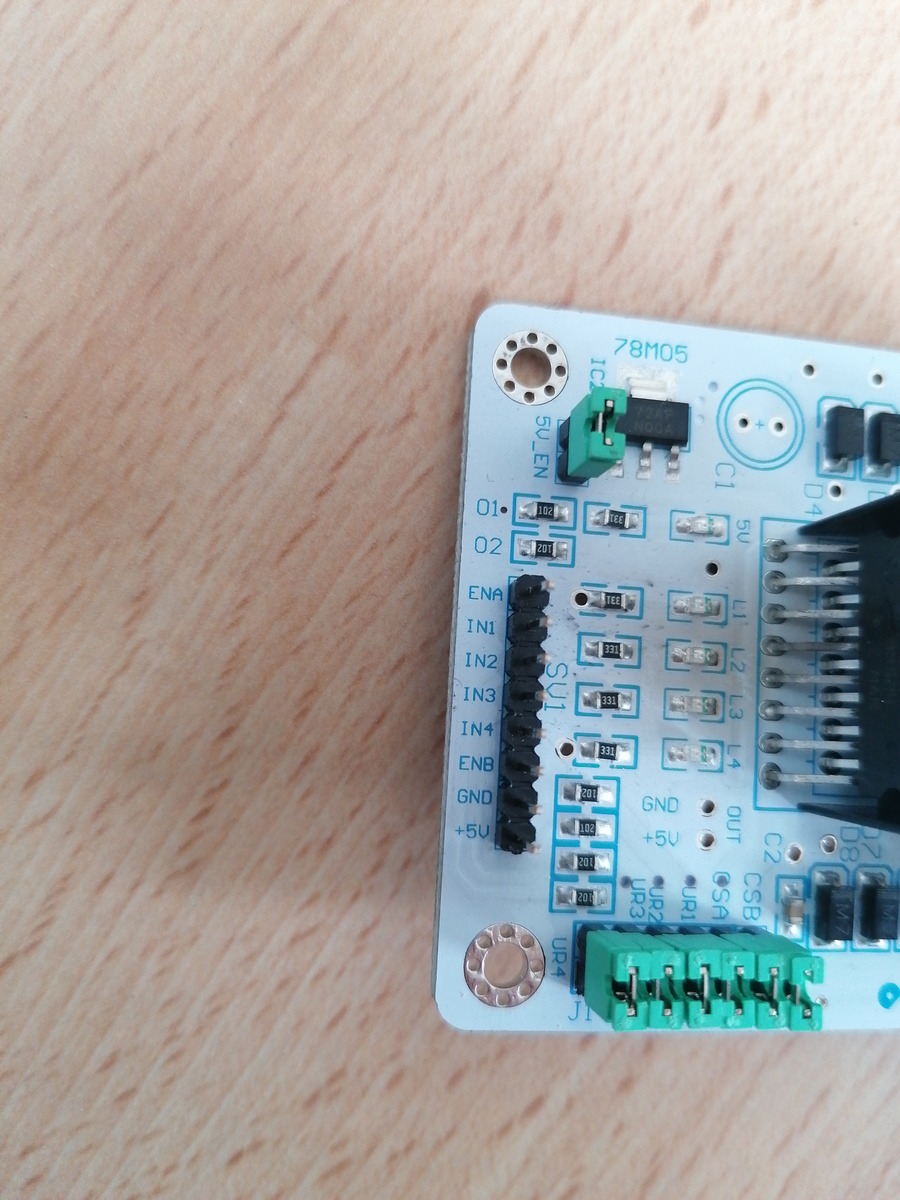
Lothar M. schrieb: > Was ist auf den restlichen offenen 4 Pins auf der Logikseite der > Motortreiber, wenn da an den 8 Pins nur 4 Signale (blaurotgrüngelb) > angeschlossen sind? Meinst du diese?
Johannes schrieb: > Könnte ich den Motor mit diesem Netzteil und diesem Treiber betreiben? Kannst du, aber das 24V NT würde für den Motor ausreichend.
Das sieht doch super aus... Werde das gleich mal ausprobieren. Will nur nicht noch ein Teil abrauchen lassen... Meinst du das Netzteil s.o. Könnte funktionieren?
Tany schrieb: > Johannes schrieb: > Könnte ich den Motor mit diesem Netzteil und diesem Treiber betreiben? > > Kannst du, aber das 24V NT würde für den Motor ausreichend. Perfekt... Danke... Und die 15 A sind kein Problem?
Johannes schrieb: > Meinst du diese? Ja, dort steht GND. Der muss mit dem Arduino-GND verbunden werden. Deinem "Schaltplan" kann man nichts derartiges entnehmen. > Und die 15 A sind kein Problem? Du kannst auch mit einem 500PS Auto Schrittgeschwindigkeit fahren. Du darfst nur nicht so heftig aufs Gas drücken... Johannes schrieb: > Output current. 2.8A~7.8A Stell zum Anfang die SW1..3 auf "on". > Internal Insurance:10A Nett, "Insurance". Ich hätte da eher sowas wie "Fuse" oder "Protection" erwartet... ;-)
Johannes schrieb: > Und die 15 A sind kein Problem? Nein, der Treiber begrenzt den Strom im Gegensatz zu schrottigen L298. Am Treiber kannst du den Strom für den Motor anpassen. Ohne Last würde ich mit kleinem Strom anfangen. Später wenn hohes Drehmoment und hohe Drehzahl benötigt werden, kann man an Strom und Spannung anpassen.
Lothar M. schrieb: > Nett, "Insurance". > Ich hätte da eher sowas wie "Fuse" oder "Protection" erwartet... ;-) Google translate lässt grüßen... Ich danke euch allen, werde mich dann mal ans Werk begeben. Jetzt stellt sich mir nur noch die Frage wie ich den Treiber mit dem Arduino verbinde... Aber werde mir erstmal den Code den Tany verlinkt hatte runterladen und mich selber probieren rein zu denken.
Johannes schrieb: > Habe gerade mal nach dem Datenblatt geschaut von dem Treiber den ich zur > Verfügung habe DQ 860 MA Für einen Schrittmotor reicht er, bringt nicht ganz Nennleistung aber nur knapp drunter (5.6A statt 5.9A) so daß man von guter Ausnutznug reden kann.
Stephan schrieb: > Die Anschlüsse für die Sense Pins sind zwar raus geführt, das war es > aber auch. Wie man sowas mit einer solchen Beschreibung verkaufen kann > ist mir unklar. Kein Hinweis auf eine nötige Stromregelung oder > Begrenzung. Es zwingt einen auch keiner, den Motor oberhalb der Nennspannung zu betreiben. Johannes schrieb: > Stromspannung: 3.78V Was auch immer "Stromspannung" ist, der dahinter stehende Wert zzgl. der U_CE der Transitoren würde einen sicheren Betrieb erlauben, wenn denn der Motorstrom nicht bereits über dem maximal zulässigen Strom des L298 läge.
Hallo MaWin, MaWin schrieb: > Für 4.2Arms Motore braucht man 6A stromregelnde Mikroschritt-Treiber wie > https://www.omc-stepperonline.com/de/dm860s-de.html Soweit so gut... > Dann geht auch dein Netzteil, da ein Motor 4,2*3,72*2 = 31 Watt zieht, > der Treiber vielleicht 80% Wirkungsgrad hat also 40W vom Netzteil, das > reicht also für 9 Motoren. Das wird aber durch ständige Wiederholung auch nicht richtig. Die 31W decken gerade mal die ohmschem Verluste in den beiden Motorwicklungen ab. Die Verluste im Treiber kann man bei modernen Treibern fast vernachlässigen (anders als beim L298), aber wenn der Motor auch noch etwas antreiben soll, muss auch die mechanisch abgegebene Leistung berücksichtigt werden. Schrittmotoren haben zwar nicht den besten Wirkungsgrad, >0 ist er aber schon. ;) Mit freundlichen Grüßen Thorsten Ostermann
Thorsten O. schrieb: > Die Verluste im Treiber kann man bei modernen Treibern fast > vernachlässigen (anders als beim L298), Na, sooo schlimm ist es aber auch nicht. Aber deine Berechnung teile ich nicht. In dem Strom, welcher für den Motor eingestellt wird, sind die abgegebene mech. Leistung wie auch die Verlußte eingerechnet. In der Praxis wird sowas auch selten unter Dauer-Vollast laufen. In einer CNC-Fräse schätze ich mal 25%.
Der uralte L298 zeichnet sich durch das Fehlen jeglicher Schutzschaltungen und durch sehr hohe Verluste (60mA Stromverbrauch, bis zu 4V Spannungsabfall) aus.
Hallo Michael, michael_ schrieb: > Thorsten O. schrieb: >> Die Verluste im Treiber kann man bei modernen Treibern fast >> vernachlässigen (anders als beim L298), > > Na, sooo schlimm ist es aber auch nicht. Dann rechne es für den L298 gerne mal nach. Bei 2A pro Phase gehen da einige Watt verloren. Genau deswegen brauchen die Dinger ja so dicke Kühlkörper. > Aber deine Berechnung teile ich nicht. > > In dem Strom, welcher für den Motor eingestellt wird, sind die > abgegebene mech. Leistung wie auch die Verlußte eingerechnet. Nichts gegen deine Meinung, aber hier geht es um Fakten. Du kannst deine These ja sicherlich mit Argumenten belegen? Vielleicht hilft dir diese Überlegung auf die Sprünge: P(gesamt)=P(elektrisch)+P(mechanisch), wobei in P(elektrisch) auch die Verluste von Treiber und dynamische Wirbelstromverluste enthalten sind. Jetzt lass mal einen Motor unbelastet laufen (also P(mechanisch=0)) und miß Spannung und Stromaufnahme vom Netzteil zum Motortreiber. Damit hast du P(elektrisch). Wenn du jetzt den Motor belastet (z.B. Welle mit dem Finger bremsen), wird zusätzlich mechanische Leistung abgegeben (was du an deinen heißen Fingern spüren kannst). Wo soll diese Leistung auf einmal herkommen, ohne das P(gesamt) ansteigt? Das ohmsche Gesetzt wird ja nicht aufgehoben, d.h. P(elektrisch) verringert sich nicht. Das das so ist kannst du außerdem leicht am höheren Strom vom Netzteil zum Treiber erkennen. Probier es einfach mal aus... ;) > In der Praxis wird sowas auch selten unter Dauer-Vollast laufen. > In einer CNC-Fräse schätze ich mal 25%. In den üblichen Käsefräsen sind die Motoren dermaßen überdimensioniert, dass die mechanisch abgegebene Leistung kaum von anderen Effekten (z.B. Abnahme des Stroms und damit der elektrischen Verluste bei höheren Drehzahlen) zu unterscheiden ist. Mit freundlichen Grüßen Thorsten Ostermann
Thorsten O. schrieb: > Dann rechne es für den L298 gerne mal nach. Bei 2A pro Phase gehen da > einige Watt verloren. Genau deswegen brauchen die Dinger ja so dicke > Kühlkörper. Natürlich ist es schön paar Watt einzusparen. Aber bei einer Bastler-CNC ist das doch Pillepalle! Wenn das Ding 24 Std durchläuft, kann man sich Gedanken machen. Ich teile hier die Energie-Untergangs-Hysterie nicht. Es gibt da ganz andere Baustellen. Seit Jahren habe ich eine EMIS SMC1500. Und bastele an einer CNC herum. Da ist ein NJM3770A verbaut. Ich denke da im Traum nicht daran, diese Steuerung wegen der Energie zu ersetzen. Thorsten O. schrieb: > Jetzt lass mal einen Motor unbelastet laufen (also P(mechanisch=0)) und > miß Spannung und Stromaufnahme vom Netzteil zum Motortreiber. Damit hast > du P(elektrisch). Wenn du jetzt den Motor belastet (z.B. Welle mit dem > Finger bremsen), wird zusätzlich mechanische Leistung abgegeben (was du > an deinen heißen Fingern spüren kannst). Hör doch auf! Die Steuerung begrenzt den Strom. Der eingestellt wird. Und damit die Leistung. Mehr geht nicht. Es geht hier um Schrittmotoren. Aber das weißt du ja.
Hallo Michael, michael_ schrieb: > Thorsten O. schrieb: >> Dann rechne es für den L298 gerne mal nach. Bei 2A pro Phase gehen da >> einige Watt verloren. Genau deswegen brauchen die Dinger ja so dicke >> Kühlkörper. > > Natürlich ist es schön paar Watt einzusparen. > Aber bei einer Bastler-CNC ist das doch Pillepalle! > > Wenn das Ding 24 Std durchläuft, kann man sich Gedanken machen. > Ich teile hier die Energie-Untergangs-Hysterie nicht. > Es gibt da ganz andere Baustellen. Das war auch gar nicht die Fragestellung. Die Frage war, wie man das Netzteil für einen Schrittmotor-Antrieb dimensionieren muss. Und da machst es u.U. schon einen Unterschied, ob im Treiber 1W oder 10W verbraten werden. Gerade bei mehrachsigen Anwendungen. Bei Käsefräsen spielt das keine Rolle, mangels know-how wird da im Zweifelsfall auch das Netzteil 1-2 Nummern größer genommen. > Thorsten O. schrieb: >> Jetzt lass mal einen Motor unbelastet laufen (also P(mechanisch=0)) und >> miß Spannung und Stromaufnahme vom Netzteil zum Motortreiber. Damit hast >> du P(elektrisch). Wenn du jetzt den Motor belastet (z.B. Welle mit dem >> Finger bremsen), wird zusätzlich mechanische Leistung abgegeben (was du >> an deinen heißen Fingern spüren kannst). > > Hör doch auf! > Die Steuerung begrenzt den Strom. Der eingestellt wird. > Und damit die Leistung. Mehr geht nicht. > Es geht hier um Schrittmotoren. > > Aber das weißt du ja. Das musst du mir nicht erkllären, ich beschäftige mich seit >25 Jahren mit Schrittmotoren. Du verstehst meinen Punkt aber offenbar noch nicht. Der Strom in der Motorwicklung wird geregelt, ja. Da bleibt die Spannung als variable Größe (welche im zeitlichen Mittel(!) an der Wicklung anliegt -> Einschaltdauer). Auf der Eingangsseite vom Treiber ist es andersrum, da ist die Spannung konstant, aber der Strom variabel. Der Motortreiber kann die Physik nicht aufheben, die mechanisch abgegebene Leistung muss irgendwo herkommen. Und die ist bei P=I²*R eben noch nicht eingerechnet. Wie gesgt, probier es mal aus. Das hilft meistens mehr für das Verständis als theoretische Diskussionen. Schau dir auch mal das PWM-Signal am Treiberausgang an, wenn du die Last variierst. Du wirst sehen, dass sich die Einschaltdauer ändert. Das ist übrigens einer der Ansätze zur sensorlosen Lastbestimmung bei Schrittmotoren. Mit freundlichen Grüßen Thorsten Ostermann
Thorsten O. schrieb: > probier es mal aus. Warum? Der hat schon jahrelang probiert. Thorsten O. schrieb: > P(gesamt)=P(elektrisch)+P(mechanisch) Mehr braucht man nicht zu sagen oder?
Thorsten O. schrieb: > Das musst du mir nicht erkllären, ich beschäftige mich seit >25 Jahren > mit Schrittmotoren. Weiß ich doch! Thorsten O. schrieb: > Schau dir auch mal das > PWM-Signal am Treiberausgang an, Das ist keine PWM. Wenn man so eine Stufe zur Ansteuerung von einem Gleichstrommotor nimmt, hättest du Recht.
> das Dingen ist so teuer wie ne Schachtel Marlboro...
Was aber nicht heißt, daß man es auch genau so aufrauchen sollte.
Genau: PWM, oder wie würdest du die Stromregelung sonst bezeichnen? Der Takt ist fix, die Einschaltzeit variabel. Aber selbst wenn es keine PWN wäre, sondern mit constant off time arbeiten würde, wäre das Ergebnis das gleiche: Die im zeitlichen Mittel über der Wicklung anliegende Spannung ist nicht konstant. Mit freundlichen Grüßen Thorsten Ostermann
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.