Seit nun einigen Stunden habe ich versucht, mich in die Funktion eines Halbbrückentreibers hineinzulesen, aber komme nicht ganz damit klar. In meiner Ausgangssituation habe ich einen Motor per PWM mit einem low-side FET geschaltet. Ich möchte ihn aber auch bremsen können. Das Mittel der Wahl scheint ein Zweiquadrantensteller zu sein (alternativ könnte ich den Motor mit einem Schütz umschalten, aber in einer reelen Preisklasse findet sich da nix für 24 V DC und 100 A – falls aber jemand was kennt, gerne). Nun habe ich u. a. einige Datenblätter gewälzt, die aber nur mehr Fragen aufwarfen. Rausgepickt habe ich mir erst mal den IRS2011: https://www.infineon.com/dgdl/Infineon-IRS2011-DataSheet-v01_00-EN.pdf?fileId=5546d462533600a401535675c19f2784 Dann habe ich die Application Notes gewälzt: https://www.infineon.com/dgdl/Infineon-HV_Floating_MOS_Gate_Drivers-ApplicationNotes-v01_00-EN.pdf?fileId=5546d4626c1f3dc3016c47de609d140a Es gibt noch eine andere AN, die sich aber wohl primär auf IGBT bezieht. Was mir jetzt Probleme beim Verständnis macht, ist der ganze Bootstrap-Krams. Es geht darum, eine ausreichend hohe Spannung ans Gate des high-side FETs zu liefern, damit er durchschaltet, und wenn er durchschaltet und damit Source annähernd 24 V erreicht, muss die Gatespannung entsprechend höher sein, richtig? Nur warum ist im Datenblatt die Bootstrap-Spannung VB so genau angegeben, wenn sie eigentlich durch die Schaltung mit dem Kondensator vorgegeben ist? Auch die Berechnung des Kondensators bekomme ich nicht hin, da fehlen mir teilweise die Werte. Außerdem soll VB ja einerseits bis 200 V hochgehen können, aber VS darf nur 20 V darunter liegen? Wie soll das gehen, wenn der low-side FET durchschaltet, liegt VS doch annähernd auf Masse, also 24 V unterhalb von VB? Kann ja nur ein Verständnisproblem bei mir sein. Ist es eigentlich egal, ob ich den Motor wie gehabt angeschlossen lasse, oder muss ich in in der Halbbrücke von VS zu Masse schalten? Im Übrigen sollen die FETs nicht im PWM-Takt abwechselnd schalten, sondern ausschließlich, damit ich entweder beschleunigen oder bremsen kann und dazwischen Leerlauf habe. Deshalb ein High/Low-Treiber und kein "echter" Halbbrückentreiber und keine logische Verriegelung (das PWM-Signal wird mit einem Relais umgeschaltet). Lieben Dank für alle hilfreichen Anregungen und Ideen!
ManuM schrieb: > Im Übrigen sollen die FETs nicht im PWM-Takt abwechselnd schalten, > sondern ausschließlich, damit ich entweder beschleunigen oder bremsen > kann und dazwischen Leerlauf habe. > ... > (das PWM-Signal wird mit einem Relais umgeschaltet). In dem Falle baust Du eine diskrete Halbbrücke mit einem n-MOSFET und einem p-Mosfet auf. Dadurch wird kein Bootstrapping benötigt. Zerbrichst Dir also den Kopf umsonst.
Dieter schrieb: > In dem Falle baust Du eine diskrete Halbbrücke mit einem n-MOSFET und > einem p-Mosfet auf. Dadurch wird kein Bootstrapping benötigt. Zerbrichst > Dir also den Kopf umsonst. Hatte ich anfangs auch überlegt, aber es erweist sich als äußerst schwierig, in der passenden Leistungsklasse überhaupt einen p-Kanal-Typ zu finden.
ManuM schrieb: > Nur warum ist im Datenblatt die Bootstrap-Spannung VB so genau > angegeben, wenn sie eigentlich durch die Schaltung mit dem Kondensator > vorgegeben ist? Was meinst du mit "genau angegeben"? Im Datenblatt steht der erlaubte Bereich und der empfohlene Bereich. Daneben gibt es einen Schwellwert, unter dem sich der Treiber abschaltet - der Schwellwert ist natürlich genauer spezifiziert. ManuM schrieb: > Außerdem soll VB ja einerseits bis 200 V hochgehen können, aber VS darf > nur 20 V darunter liegen? Wie soll das gehen, wenn der low-side FET > durchschaltet, liegt VS doch annähernd auf Masse, also 24 V unterhalb > von VB? Kann ja nur ein Verständnisproblem bei mir sein. Ist es wohl. VB bewegt sich beim Schalten mit, wenn sich VS verschiebt. Der Kondensator sorgt dafür, dass die Differenz von VB nach VS halbwegs konstant ist und zum Ansteuern des Highside-FET genutzt werden kann (dessen Bezugspotential ja VS ist). Wenn VS auf 0V liegt, dann wird der Kondensator über die Diode aus VCC aufgeladen. Wenn VS dann ansteigt, steigt VB mit an, so dass Gate-Source-Spannung des Highside-FET mit ca. VCC-0.7V (der Spannungsdifferenz VB-VS) angesteuert werden kann. ManuM schrieb: > Im Übrigen sollen die FETs nicht im PWM-Takt abwechselnd schalten, > sondern ausschließlich, damit ich entweder beschleunigen oder bremsen > kann dann ist der Bootstrapp-Treiber das falsche Konzept: wenn der High-Side FET längere Zeit statisch durchschalten soll, sinkt irgendwann doch die Spannungsdifferenz zwischen VB und VS (weil der Kondensator sich langsam entlädt). VS muss regelmäßig wieder auf 0V liegen (PWM-Ansteuerung), damit der Kondensator immer wieder aufgeladen werden kann.
Da gibt es einige Typen zu finden. Zwei parallel zu schalten wäre auch noch eine Lösung, wenn man dabei ein paar Dinge beachtet. https://www.mouser.de/Semiconductors/Discrete-Semiconductors/Transistors/MOSFET/_/N-ax1sf?Keyword=p-channel&FS=True&Ns=Id%20-%20Continuous%20Drain%20Current|1
Achim S. schrieb: > Was meinst du mit "genau angegeben"? Irgendwie will mir dieses VSmin = VB -20 (bei maximum) bzw. VB = VS+ 20 (bei recommended) nicht verständlich werden. Soll das heißen, VS darf höchstens 20 V unterhalb liegen, oder muss mindestens 20 V niedriger sein? > Ist es wohl. VB bewegt sich beim Schalten mit, wenn sich VS verschiebt. > Der Kondensator sorgt dafür, dass die Differenz von VB nach VS halbwegs > konstant ist und zum Ansteuern des Highside-FET genutzt werden kann > (dessen Bezugspotential ja VS ist). > > Wenn VS auf 0V liegt, dann wird der Kondensator über die Diode aus VCC > aufgeladen. Wenn VS dann ansteigt, steigt VB mit an, so dass > Gate-Source-Spannung des Highside-FET mit ca. VCC-0.7V (der > Spannungsdifferenz VB-VS) angesteuert werden kann. Okay, jetzt macht es langsam klick... > dann ist der Bootstrapp-Treiber das falsche Konzept: wenn der High-Side > FET längere Zeit statisch durchschalten soll, sinkt irgendwann doch die > Spannungsdifferenz zwischen VB und VS (weil der Kondensator sich langsam > entlädt). VS muss regelmäßig wieder auf 0V liegen (PWM-Ansteuerung), > damit der Kondensator immer wieder aufgeladen werden kann. Hmm, verstehe. Das Durchschalten dürfte dann weniger das Problem sein als der Leerlaufbetrieb, wenn VS damit über den Motor auf +24 V geht. Also müsste ich den Motor stattdessen zwischen VS und Masse anschließen, womit der Kondensator im Leerlauf geladen würde? Wäre es denn ansonsten grundsätzlich möglich, VB fix an einen Step-Up-Wandler mit gemeinsamer Masse zu hängen? Dieter schrieb: > Da gibt es einige Typen zu finden. Zwei parallel zu schalten wäre auch > noch eine Lösung, wenn man dabei ein paar Dinge beachtet. Ich vertraue den Teilen in den kleinen Gehäusen nicht, dass sie die angegebene Leistung wirklich schaffen. Allein schon die dünnen Beinchen... Jedenfalls: Wenn ich einen p-FET hätte, bräuchte ich im Prinzip einen normalen Treiber, allerdings mit invertiertem Ausgang, richtig?
ManuM schrieb: > Irgendwie will mir dieses VSmin = VB -20 (bei maximum) bzw. VB = VS+ 20 > (bei recommended) nicht verständlich werden. Soll das heißen, VS darf > höchstens 20 V unterhalb liegen, oder muss mindestens 20 V niedriger > sein? Der Abstand zwischen VB und VS (die Spannung über den Bootstrap-Kondensator) darf maximal 20V betragen. Aus dieser Spannung wird die Gate-Source-Spannung des Highside-FET getrieben, und die darf ja typsich auch nicht größer werden als 20V. ManuM schrieb: > Das Durchschalten dürfte dann weniger das Problem sein > als der Leerlaufbetrieb, wenn VS damit über den Motor auf +24 V geht. > Also müsste ich den Motor stattdessen zwischen VS und Masse anschließen, > womit der Kondensator im Leerlauf geladen würde? Ich kann nicht ganz folgen. Aber das Problem besteht immer dann, wenn der Bootstrap-Kondensator lange nicht aufgeladen wird (also VS lange nicht auf 0V geht). ManuM schrieb: > Wäre es denn ansonsten grundsätzlich möglich, VB fix an einen > Step-Up-Wandler mit gemeinsamer Masse zu hängen? Im Prinzip kannst du VB auch extern versorgen. Aber wenn du es relativ zu GND erzeugst, dann musst du auch dafür sorgen, dass die maximal erlaubte Differenz zwischen VB und VS nicht überschritten wird. Im Prinzip kannst du auch einen galvanisch getrennten DCDC nehmen, dessen Ausgang du zwischen VB und VS einspeist. Damit sind auch beliebig lange ON-Phasen des Highside-Treibers möglich. Es gibt auch einige Treiber, die nach diesem Prinzip oder per Ladungspumpe (oder per Photoeffekt) die Steuerspannung für den Highside-FET erzeugen (also kein Bootstrapping machen und damit auch dauerhaft schalten können). Wenn du den Bootstrapkondensator groß genug wählst, dann kann er auch für lange On-Phasen ausreichen (nur halt nicht für dauerhaftes Einschalten). ManuM schrieb: > Ich vertraue den Teilen in den kleinen Gehäusen nicht, dass sie die > angegebene Leistung wirklich schaffen. Allein schon die dünnen > Beinchen... Du findest pFETs in den identischen Gehäusen wie nFETs - dünne Beinchen sind also kein relevanter Aspekt. Aber natürlich haben pFETs immer einen höheren Widerstand als vergleichbar große nFETs - dafür sorgt einfach die Physik.
Achim S. schrieb: > Der Abstand zwischen VB und VS (die Spannung über den > Bootstrap-Kondensator) darf maximal 20V betragen. Aus dieser Spannung > wird die Gate-Source-Spannung des Highside-FET getrieben, und die darf > ja typsich auch nicht größer werden als 20V. Ok, dann erübrigt sich das mit der externen Quelle. > Ich kann nicht ganz folgen. Aber das Problem besteht immer dann, wenn > der Bootstrap-Kondensator lange nicht aufgeladen wird (also VS lange > nicht auf 0V geht). Bis jetzt hatte ich den Motor zwischen +24 V und dem FET. Demnach müsste ich ihn nun zwischen VS und Masse anklemmen, denn dadurch würde VS ja im Leerlauf (beide FETs sperren) fast auf Masse gezogen. Zum Bremsen dient dann der untere FET, was jederzeit funktioniert, und zum Beschleunigen der obere FET, was spätestens nach einer kurzen Pause (um den Bootstrap-Kondensator über den Motor zu entladen) gehen würde - richtig? Theoretisch dürfte dann der obere FET auch 100% durchschalten, weil der Spannungsabfall über dem Motor kleiner sein müsste als die Versorgungsspannung abzüglich Diodenspannung (hier +12 V). Mein FET ist spätestens bei 5 V voll offen. > Es gibt auch einige > Treiber, die nach diesem Prinzip oder per Ladungspumpe (oder per > Photoeffekt) die Steuerspannung für den Highside-FET erzeugen. Kennst du zufällig einen passenden Typ? Die bei Mouser schienen mir alle mit Bootstrap zu sein. > Du findest pFETs in den identischen Gehäusen wie nFETs - dünne Beinchen > sind also kein relevanter Aspekt. Nicht bei Mouser, da ist das Maximum bei p-Kanal rund 200 A im TO-247 und bei n-Kanal rund 600 A im SOT-227-4. Da hat mir die p-Variante zu wenig Reserven.
ManuM schrieb: > Theoretisch dürfte dann der obere FET auch 100% durchschalten, weil der > Spannungsabfall über dem Motor kleiner sein müsste als die > Versorgungsspannung abzüglich Diodenspannung (hier +12 V). Mein FET ist > spätestens bei 5 V voll offen. Sorry, aber deine Beschreibung wird für mich weiterhin nicht klarer. Um vielleicht mal ein paar Fakten festzuhalten: dein Motor läuft an 24V, und der IRS2011 wird mit 12V versorgt, richtig? Das Problem besteht beim IRS2011 immer, wenn der obere FET 100% der Zeit über "längere Zeitdauern" durchschalten soll. Ob der Motor dabei beschleunigt oder gebremst wird, ist egal. Ab wann die Zeitdauer zu lange wird hängt davon ab, wie der Bootstrapkondensator dimensioniert ist. Im statischen Schaltzustand wird er mit ein paar hundert µA entladen (I_QBS im Datenblatt). 100µA bedeuten, dass z.B. 100µF in 1s um 1V entladen werden. ManuM schrieb: > Demnach müsstet > ich ihn nun zwischen VS und Masse anklemmen, denn dadurch würde VS ja im > Leerlauf (beide FETs sperren) fast auf Masse gezogen. Wenn du ein Ende des Motors fest auf Masse legst und das andere über die Halbbrücke ansteuerst, dann wird dein Motor beschleunigt, wenn du den High-Side einschaltest. Wenn du daach beide FETs ausschaltest, dann zieht der (induktive) Motor den Anschluss der Halbbrücke so weit ins negative, dass die Substratdiode des Lowside-FETs zu leiten beginnt. Damit liegt VS auf ca. -1V und der Bootstrap-Kondensator wird wieder aufgeladen. Das würde aber genau so passieren, wenn du dann den Lowside-FET anschaltest. Der Unterschied wäre, dass du mit aktiven Lowside-FET weniger Verluste am Lowside-FET hättest. Bei einem PWM-Betrieb wäre das ein aktiver Freilauf. Wenn der Motor dauerhaft steht und beide FETs sind ausgeschaltet, dann zieht der Motor VS auf 0V und der Bootstrap-Kondensator wird von VCC=12V über die Diode aufgeladen. ManuM schrieb: > Kennst du zufällig einen passenden Typ? Die bei Mouser schienen mir alle > mit Bootstrap zu sein. Hier ein Beispiel für einen isolierten Gate-Treiber mittels Photoeffekt: http://www.ixysic.com/home/pdfs.nsf/www/FDA217.pdf/$file/FDA217.pdf Achtung: das Teil schaltet schnarchlangsam ein. Der Treiberstrom fürs Gate liegt im µA Bereich, die Schaltzeiten im ms-Bereich. Für eine PWM viel zu lahm. Aber um einen Highside-FET dauerhaft durchzuschalten kann man ihn ggf. nutzen. Hier ein Beispiel für einen isolierten Gatetreiber mit integriertem DCDC-Wandler: https://www.analog.com/media/en/technical-documentation/data-sheets/ADuM6132.pdf Für deine Zwecke sicher nutzbar, kostet halt ein paar Euro.
Angehängte Dateien:
-

Laststromkreis_v2a.jpg
220 KB -

Laststromkreis_v2n.jpg
240 KB
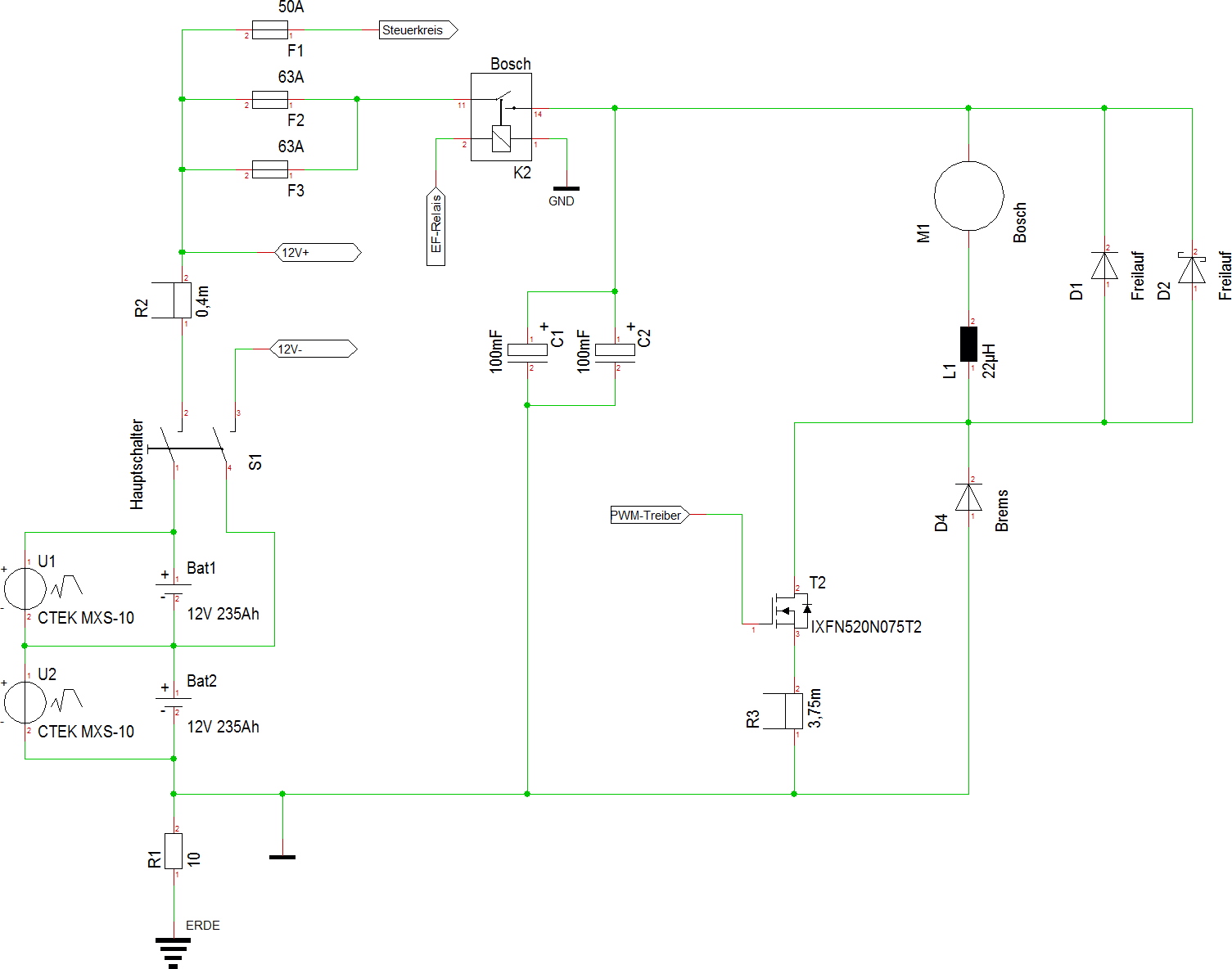
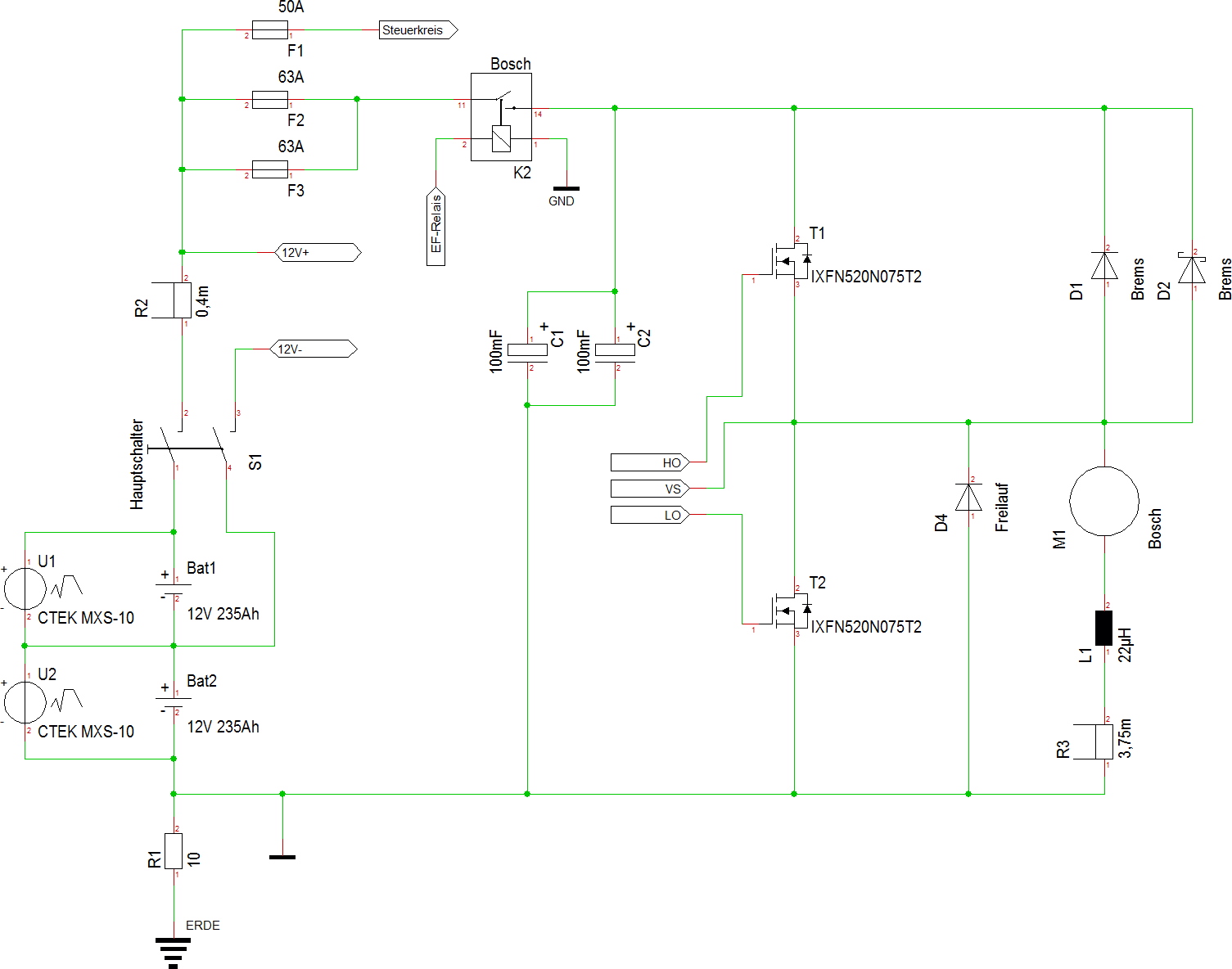
Danke für deine Geduld :-) Achim S. schrieb: > Um vielleicht mal ein paar Fakten festzuhalten: dein Motor läuft an 24V, > und der IRS2011 wird mit 12V versorgt, richtig? Jepp! Habe die aktuelle und geplante Schaltung mal angehängt. > Das Problem besteht beim IRS2011 immer, wenn der obere FET 100% der Zeit > über "längere Zeitdauern" durchschalten soll. Ob der Motor dabei > beschleunigt oder gebremst wird, ist egal. Ok, ich habe einen Denkfehler gemacht. Das ist dann in jedem Fall ein Problem. > Der > Unterschied wäre, dass du mit aktiven Lowside-FET weniger Verluste am > Lowside-FET hättest. Bei einem PWM-Betrieb wäre das ein aktiver > Freilauf. Das würde aber bedeuten, wenn der Motor gerade schneller ist als der Tastgrad vorgibt, dann würde er aktiv bremsen? Das war nämlich überhaupt erst Anlass, meine Schaltung auf Halbbrücke zu erweitern: Der Motor sollte aktiv bremsen können, aber nicht im Beschleunigungsbetrieb, wenn der Tastgrad niedrig ist. Das Problem war bislang, dass er einfach nie gebremst hat, selbst wenn das Erregerfeld voll hochgefahren war. > Hier ein Beispiel für einen isolierten Gatetreiber mit integriertem > DCDC-Wandler: > https://www.analog.com/media/en/technical-documentation/data-sheets/ADuM6132.pdf > Für deine Zwecke sicher nutzbar, kostet halt ein paar Euro. Na, hauptsache im einstelligen Bereich. Das ist als Einzelstück völlig okay, ein guter Tipp. Hat dennoch kleine Nachteile: SMD, also kein Sockel für leichtes Tauschen bei Defekt*, und ich muss die Spannungsversorgung auch des Eingangssignals (kommt von einem HCPL-2231) auf 5 V runterschrauben. Beides aber kein Ausschlusskriterium. *: Bei den allerersten Tests hatte ich statt dem großen mehrere kleinere FETs parallel geschaltet. Davon waren mehrere gestorben (nicht auf einmal), das hat auch mal den Treiber mit in den Tod gerissen :-/
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.