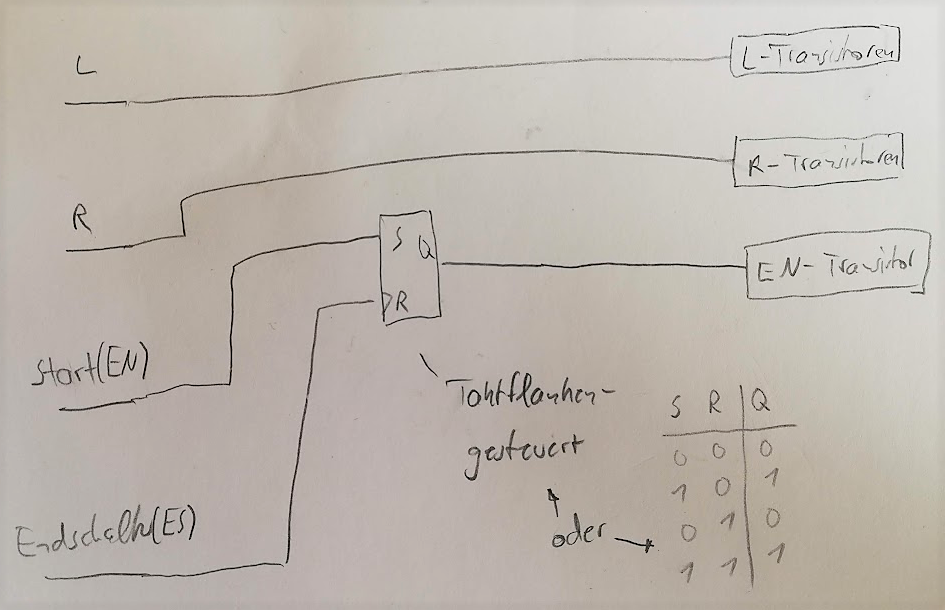
Ein Motor soll über eine H Brücke Links und Rechts drehen. Die H-Brücke verfügt zusätzlich über einen Enable Eingang. Wird ein Endschalter erreicht soll der Motor stoppen. Und dann wenn vom Microcontroller wieder ein enable Signal kommt, trotz gedrücktem Endschalter, wieder starten. Erstmal ist die Idee ein RS-Flip-Flop einzusetzen dessen Setzeingang vom Enable-Ausgang des µControllers kommt und das Signal des Endschalters kann das Flip-Flop rücksetzen (Siehe Anhang). Jedoch ist an der Schaltung das Problem, das ein RS Flip Flop im Zustand S=1 / R=1 den Ausgang auf Q=0 schaltet. Ein Taktflankengesteuertes RS-Flip-Flop könnte das Problem beheben, da der Endschalter das FlipFlop nur beim Erreichen der Endschalterposition resettet und dann trotz gedrücktem Endschalter bei Enable wieder setzt. Leider habe ich kein Taktflankengesteuertes RS-Flip Flop und überwiegend nur JK Flip Flops mit clock Eingang gefunden. Hat eventuell jemand eine Idee wie dies umgesetzt werden kann? Noch sind auch alle anderen Komponenten wie die H-Brücke offen. Jedoch können vom µController nur Signale ausgegeben und nicht gelesen werden.
Angehängte Dateien:
-

rs.png
330 KB
Florian P. schrieb: > Jedoch können vom > µController nur Signale ausgegeben und nicht gelesen werden. Uups? Warum soll das nicht gehen? Dann bleibt dir evtl. nur, dem MC bei Erreichen des Endschalters ein Reset zu geben, damit er die Finger vom Enable Signal lässt. Sinnvoll ist es dann, den Endschalter vorher über ein Monoflop zu schicken und dann damit MC und RS Flipflop zurückzusetzen. Allerdings wäre es viel einfacher, dem MC doch das Endschalter Signal einzufüttern - dann entfällt jegliche externe Logik.
Habe vereinfacht von Microcontroller gesprochen. Es wird über eine Antennenleitung ein DISEQC IC angesprochen, der leider nur vier digitale Ausgänge zur verfügung hat.
Florian P. schrieb: > Hat eventuell jemand eine Idee wie dies umgesetzt werden kann? Ich habe zwar deinen gewünschten Ablauf nicht vollständig verstanden und ein taktflankengesteuertes RS ist mir auch nicht bekannt (dann ist es kein RS-FF), aber ich würde die gewünschte Funktion einfach in einen kleinen Tiny packen. Da kannst du beliebige Zustandsfolgen abfahren ... Das ist auf jeden Fall weniger aufwändig (sofern man die Infrastruktur für die µC-Programmierung zur Verfügung hat) als FF, ggf. Monoflop und ähnliches.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.