Hallo bin auch neu hier . Ich möchte einen 12v Scheibenwischermotor mit einen Drehstufenschalter in 12 Stufen ansteuern . Dieser ist mit einen gleichen Stufenschalter im Abtrieb verbunden. Jetzt soll aber , wenn z.B. das System in Stellung 2 steht und der Betätigungsschalter auf Stellung 11 gestellt wird ,der kürzeste Weg also Linkslauf gesteuert werden. Gibt es vielleicht eine fertige Steuereinheit . Würde mich sehr über Vorschläge freuen. Viele Grüße
Der hier ist ein Servocontroller für Potentiometer: https://electromen.com/en/products/item/motor-controllers/positioning-controllers/EM-165 Wenn du am Motor ein Poti statt Stufenschalter anbringen kannst, am Steuerschalter dann eine Reihe von Widerständen die den Positionen entsprechen, dann läuft das.
Bernd R. schrieb: > Jetzt soll aber , wenn z.B. das System in Stellung 2 steht und der > Betätigungsschalter auf Stellung 11 gestellt wird ,der kürzeste Weg > also Linkslauf gesteuert werden. Ist doch gedanklicher Humbug. Der Drehschalter kann nur von der aktuellen Position auf die nächstkleinere oder nächstgrössere gedreht werden. So bald das passiert, läuft der Motor natürlich in die Richtung los, in die gedreht wurde, denn das ist die nachstliegende. Also dreht der Motor immer in dieselbe Richtung, in die der Knopf gedrdht wird. Wenn man eine weiter weg liegende Stellung ansteuern will, dann müsste der Motor erst mal auf die Einstellung warten und z.B. 1 Sekunde gar nicht reagieren. Davon schreibst du aber nichts. Offenbar zu kurz gedacht.
Das ergibt aber eine nette Prüfungsaufgabe für die Digitaltechniker. Humbug ist ja bekanntermassen am schwersten zu realisieren.
Hallo , vielen Dank zu dem Hinweis auf den EM-165 POSITIONING . Ich muß also ein Pot verwenden von 1-100kohm . Das würde aber auch bedeuten , das ich auch nicht von einer Nullstellung gegen den Uhrzeigersinn von 1 auf 100 kohm schalten kann. Wenn ich einen Drehschalter mit angeschlossenen Widerständen verwenden würde ,führt dann nicht der Null Ohmwert , zwischen den Übergang von einen Kontakt zum anderen Kontakt , zum Abbruch des Steuerungsverlauf.!? Ich habe auch bei den Beispielen der Anwendung immer nur eine Verwendung im Bereich zwischen 0-360 Grad gesehen wie Inclinometer Bosch 0280 zur Drosselklappensteuerung . Vielleicht hat schon jemand den EM 165 schon mal verwendet.
Bernd R. schrieb: > Wenn ich einen Drehschalter mit angeschlossenen Widerständen verwenden > würde ,führt dann nicht der Null Ohmwert , zwischen den Übergang von > einen Kontakt zum anderen Kontakt , zum Abbruch des > Steuerungsverlauf.!? Eigenartig viele Interpunktionszeichen am Satzende. Welches gilt? > zum Abbruch des Steuerungsverlauf.!? Kommt auf den Drehschalter an. Wenn der "Make-Before-Break" ist, dann gibt es keinen "Abbruch". > Ich muß also ein Pot verwenden von 1-100kohm . Das würde aber auch > bedeuten , das ich auch nicht von einer Nullstellung gegen den > Uhrzeigersinn von 1 auf 100 kohm schalten kann. Nimm Spindelpotis mit mehreren Umdrehungen. Oder mach ein Getriebe sowohl zwischen Drehgriff und Poti wie auch zwischen Motor und dessen Poti (ein Mehrgangpoti/Spindelpoti hat so ein Getriebe eingebaut). > Ich habe auch bei den Beispielen der Anwendung immer nur eine Verwendung > im Bereich zwischen 0-360 Grad gesehen wie Inclinometer Bosch 0280 > zur Drosselklappensteuerung . Du musst diesen 360° Bereich einfach nur mit einer Übersetzung auf 720° aufweiten. Oder brauchst du statt der simplen 360°-Positionierbarkeit eine Möglichkeit, den Drehgriff endlos "durchzudrehen"? > Ich muß also ein Pot verwenden Du musst nochmal ausführlich über dein Problem nachdenken. Oder doch noch sagen, wofür du das brauchst.
Bernd R. schrieb: > Ich muß also ein Pot verwenden von 1-100kohm . Das würde aber auch > bedeuten , das ich auch nicht von einer Nullstellung gegen den > Uhrzeigersinn von 1 auf 100 kohm schalten kann. Wozu brauchst du überhaupt das Poti oder den Schalter? Reicht nicht einfach ein gewöhnlicher Endlos-Drehencoder? Daran kannst du drehen, soviel du lustig bist, ohne dass du mit irgendeiner 0°-360° Grenze kämpfen musst. Was ist dein eigentliches Problem?
Soll es eine illegale Auspufklappensteuerung werden? Dann hätt ich auch gern eine.!?
Hallo , an die anderen Hinweisgeber. Mein Problem bei der Steuerung des Stellmotors ist ein Zeitproblem von den Steuerungsverlauf von z.B. Position 1 in 12. Zur Info . Mit dem Stellmotor soll ein Zykloiden Bootsantrieb angesteuert werden. Hierbei ist es wichtig , das eine Richtungsänderung des Bootes sehr schnell erfolgen muß ,denn sonst ist es nicht möglich einen sauberen Kurswechsel durchzuführen ,denn in der Drehphase des Antriebs macht der Antrieb noch Schub auch wenn man den Motorantrieb ( Diesel-Elektomotor) entkoppelt kann . Das macht auch Probleme bei Verwendung eines 14kW DC Antriebsmotors bei Drehrichtungsänderung .
Drehwurm. schrieb: > Bernd R. schrieb: >> Ich muß also ein Pot verwenden von 1-100kohm . Das würde aber auch >> bedeuten , das ich auch nicht von einer Nullstellung gegen den >> Uhrzeigersinn von 1 auf 100 kohm schalten kann. > Nimm Spindelpotis mit mehreren Umdrehungen. > Oder mach ein Getriebe sowohl zwischen Drehgriff und Poti wie auch > zwischen Motor und dessen Poti (ein Mehrgangpoti/Spindelpoti hat so ein > Getriebe eingebaut). Besser: es sind Potis erhältlich, welche Anschlaglos sind (auch nicht nach mehreren Umdrehungen). Der Widerstand ist auf "359" Grad verteilt und es gibt einen winzigen Totbereich, was aber bei nur 12 Schalterstellungen nicht relevant sein wird. Dann gibt es noch Varianten mit 2 um 90 Grad versetzten Abgriffen, um eben nicht ohne Wert über den Totbereich hinwegzukommen. Dürfte aber in/über dem Preisbereich von Stufenschaltern liegen.. > (ein Mehrgangpoti/Spindelpoti hat so ein Getriebe eingebaut). Da bin ich aber auf ein Bild eines solchen Getriebes IN Mehrgangpoti gespannt. Ausser "Feintrieb 3:1" an alten Drehkos habe ich sowas noch nie gesehen.
Bernd R. schrieb: > Mit dem Stellmotor soll ein Zykloiden Bootsantrieb > angesteuert werden. Hierbei ist es wichtig , das eine Richtungsänderung > des Bootes sehr schnell erfolgen muß ,denn sonst ist es nicht möglich > einen sauberen Kurswechsel durchzuführen ,denn in der Drehphase des > Antriebs macht der Antrieb noch Schub auch wenn man den Motorantrieb ( > Diesel-Elektomotor) > entkoppelt kann . Das macht auch Probleme bei Verwendung eines 14kW DC > Antriebsmotors bei Drehrichtungsänderung Das klingt alles etwas konfus. Meinst du so einen Antrieb? https://de.wikipedia.org/wiki/Voith-Schneider-Antrieb Und was soll da gestellt werden?
Bernd R. schrieb: > Zur Info . Mit dem Stellmotor soll ein Zykloiden Bootsantrieb > angesteuert werden. Hierbei ist es wichtig , das eine Richtungsänderung > des Bootes sehr schnell erfolgen muß ,denn sonst ist es nicht möglich > einen sauberen Kurswechsel durchzuführen ,denn in der Drehphase des > Antriebs macht der Antrieb noch Schub auch wenn man den Motorantrieb ( > Diesel-Elektomotor) > entkoppelt kann . Da würde ich noch überlegen ob es dem Aggregat zu liebe nicht sicherer ist, zwischen jeder Änderung "durch nulll" (nicht Schalterstellung!) zu gehen. > Das macht auch Probleme bei Verwendung eines 14kW DC > Antriebsmotors bei Drehrichtungsänderung . Ist der Vorteil von "Zykloiden" nicht gerade dass eben KEINE Drehrichtungsänderung vorkommt? (vgl. Hubschrauber ok?) Sonst verstehe ich "Zykloiden Bootsantrieb" nicht. Weiss sonst auch nur vom verlinkten VSA.
Mein Antrieb basiert auf dem Vioth- Schneider ist aber eine Weiterentwicklung für kleinere Boote . Hierbei wird die Drehrichtungsänderung über ein zentrales mechanisch Stellrad (Zahnrad) das über einen Stellmotor angesteuert wird .
Bernd R. schrieb: > Mein Antrieb basiert auf dem Vioth- Schneider ist aber eine > Weiterentwicklung für kleinere Boote . Hierbei wird die > Drehrichtungsänderung über ein zentrales mechanisch Stellrad (Zahnrad) > das über einen Stellmotor angesteuert wird . Was will man da mit einem 12-Stufen Schalter ? Kann es sich wirklich 25 mal um sich selber um 360 Gead drehen ? Kein Anschlag, nie reisst ein Kabel ab ?
Das Ganze ist also ein 12Stufiges Steuerrad!? Wobei die Ruderblatt (Darf man das bei diesem Antriebstype so bezeichnen?) Steuerung wesentlich langsamer ist, als das man damit vernünftig ein Boot steuern könnte?! Das ist ein gewaltiges Konzeptionelles Problem! Du bräuchtest ein Heuristisches-System das in die Zukunft sehen kann! Wenn nicht, hast du ein System, das so gut funktioniert wie ein Computer ohne entprellter Tastatur....
Drehwurm schrieb: > Sonst verstehe ich "Zykloiden Bootsantrieb" nicht. Weiss sonst auch nur > vom verlinkten VSA. Bei Hubschraubern nennt sich das zyklische Blattverstellung. Im Gegensatz zu dem entsprechenden Schiffsantrieb pendeln dort die Blätter allerdings in der Horizontalen, weil sie auch noch den Auftrieb erzeugen müssen.
Wolfgang schrieb: > Bei Hubschraubern nennt sich das zyklische Blattverstellung. Um das vergleichen zu können, müßte ein Hubschrauber schon mit einem Schaufelrad, also vertikal angetrieben werden. :D
Bernd R. schrieb: > Mein Antrieb basiert auf dem Vioth- Schneider ist aber eine > Weiterentwicklung für kleinere Boote . Hierbei wird die > Drehrichtungsänderung über ein zentrales mechanisch Stellrad (Zahnrad) > das über einen Stellmotor angesteuert wird . "Weiterentwicklung" ist ein großes Wort. Ich hätte da erst mal "eigene Variante" gesagt :-) Wie Wolfgang angemerkt hat ist die Blattverstellung des Antriebs analog zur Rotorblattverstellung beim Hubschrauber. Durch die Verstellung des Leitpunkts vom Mittelpunkt ergibt sich Richtung und Betrag der Antriebskraft. Soweit ich gesehen habe wird das üblicherweise durch X-Y Ansteuerung gemacht, eine Ansteuerung über Polarkoordinaten hat den Charme, dass man den Betrag über den Abstand von Leitpunkt und Mittelpunkt und die Richtung über den Richtungswinkel der Geraden durch Mittel und Leitpunkt direkt hat. Du hats also ein Stellrad dessen Winkel du einstellen willst. Nun, das ist jetzt keine so große Sache. Du musst die Absolutposition des Rads erfassen über einen Absolutdrehgeber. Den könnte man sich für 4 Bit fast selbst bauen (z.B. Reflexlichtschranken und eine 4 zeilige Gray-Code Scheibe. Damit hätte man 16 Schritte). Jetzt brauchst du nur eine etwas intelligente Steuerung, die aus der gewünschten und aktuellen Position berechnet ob links oder rechts herum kürzer ist und den Motor so lange drehen lässt bis die Position erreicht ist. Aber man könnte genauso eine X-Y Ansteuerung mit einem µC und zwei Servos oder Spindelantrieben machen.
Udo S. schrieb: > Jetzt brauchst du nur eine etwas intelligente Steuerung, die aus der > gewünschten und aktuellen Position berechnet ob links oder rechts herum > kürzer ist und den Motor so lange drehen lässt bis die Position erreicht > ist. Das läßt sich aber erst entscheiden, nachdem die Einstellung beendet ist! Nur, wann ist sie beendet?!
Teo D. schrieb: > Das Ganze ist also ein 12Stufiges Steuerrad!? Wobei die Ruderblatt > (Darf man das bei diesem Antriebstype so bezeichnen?) Steuerung > wesentlich langsamer ist, als das man damit vernünftig ein Boot steuern > könnte?! Teo D. schrieb: > Das läßt sich aber erst entscheiden, nachdem die Einstellung beendet > ist! Nur, wann ist sie beendet?! Den Punkt verstehe ich jetzt nicht? Siehe Wikipedia: https://de.wikipedia.org/wiki/Voith-Schneider-Antrieb#/media/Datei:Voith_03.tif
Teo D. schrieb: > Um das vergleichen zu können, müßte ein Hubschrauber schon mit einem > Schaufelrad, also vertikal angetrieben werden. :D Nein, ein Voith-Schneider-Antrieb nutzt nicht den Strömungswiderstand, wie ein Schaufelrad, dafür müssten die "Flügel" auf 90°-Stellung quer zur Strömung/Fahrtvektor stehen, tun sie aber nicht.
Von mir erst mal ein Dankeschön an den TO Bernd R. Ich kannte den Voith Schneider Antrieb noch gar nicht und habe auf jeden Fall was gelernt. Wolfgang und Teo, ich denke ihr redet aneinander vorbei. Wenn man sich die Funktionsweise auf den wirklich schön gemachten Wiki Bildern anschaut, sieht man ziemlich gut dass der Richtungsvektor von Leitpunkt zum Mittelpunkt der Anstellung der Taumelscheibe eines Hubschrauber-Rotors entspricht, und der Abstand von Leitpunkt zum Mittelpunkt der kollektiven Blattverstellung. zur ursprünglichen Frage des TO : Bernd R. schrieb: > Gibt es vielleicht eine fertige Steuereinheit Im Prinzip wäre ein Antennenrotor samt Ansteuerung das was du grob suchst.
Udo S. schrieb: > Teo D. schrieb: >> Das läßt sich aber erst entscheiden, nachdem die Einstellung beendet >> ist! Nur, wann ist sie beendet?! > > Den Punkt verstehe ich jetzt nicht? Versetze dich mal in die Lage eines Skippers, der sein Boot steuert. Wann kann die Steuerung wissen, das du den gewünschten Winkel erreicht hast und was der kürzere Weg für die Propellerstellung ist?
Angehängte Dateien:
-

Antennenrotor.jpg
140 KB -

Funktionsvidio_Zykl_008.JPG
220 KB
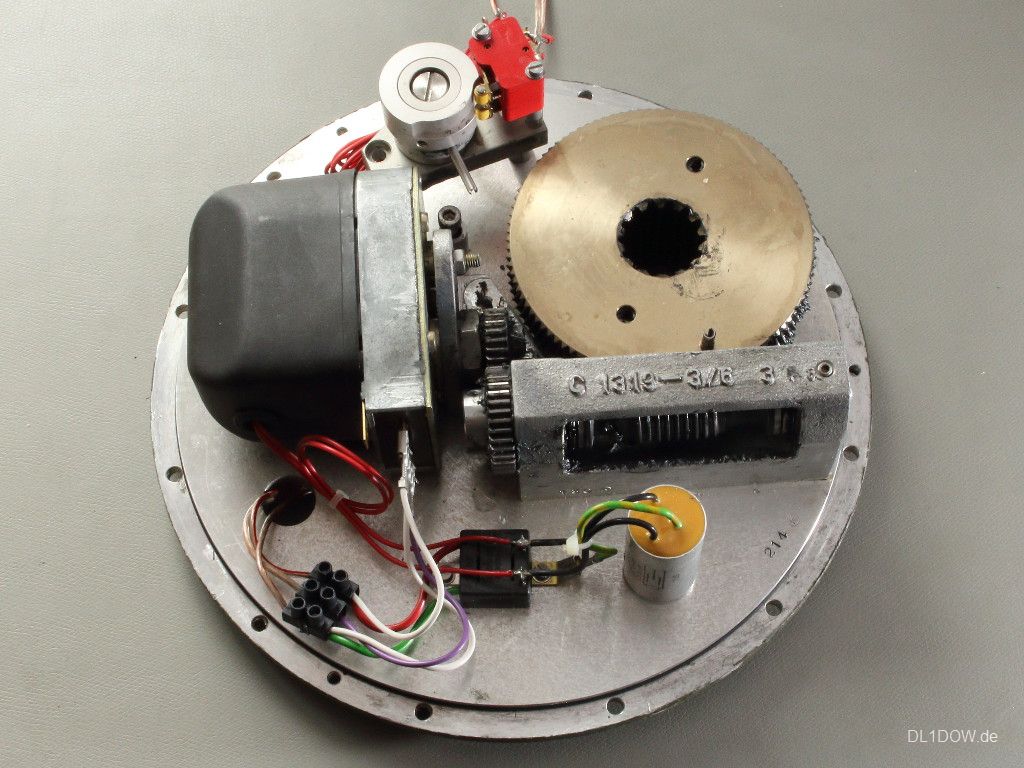

Hallo , also nochmal zum Antrieb .Mein Antrieb hat nur 2 Paddel . Die Wirkungsweise kann man sich ganz einfach so vorstellen als wenn man mit einem Handpaddel senkrecht ins Wasser taucht und einen Vorschub macht. Ja , im Prinzip ist es wie bei einer Antennenrotor Steuerung . Die müßte dann schnell und sicher reagieren. Mein Steuerantrieb sieht fast 100% tig wie auf diesen Bild aus. Jetzt noch ei zweites Bild des Antriebes
Teo D. schrieb: > das du den gewünschten Winkel erreicht hast Du meinst beim Verstellen des Soll-Antriebswinkel z.B. durch einen Poti? Ich glaube ich verstehe, das hat glaube ich auch MaWin schon angedeutet, sobald man mit dem Poti anfängt zu drehen sollte der Antrieb in die gleiche Richtung verstellen.
Udo S. schrieb: > Teo D. schrieb: >> das du den gewünschten Winkel erreicht hast > Du meinst beim Verstellen des Soll-Antriebswinkel z.B. durch einen Poti? Egal.... Kursänderung nach Backbord, wie weit wird das Ruder bewegt? Über 90° oder weniger? Je nach dem muss der Antrieb nach links o. rechts verstellt werden (kürzerer Weg). Ab WANN soll die Steuerung reagieren, nach 50, 100ms o. 1s....???? Ich geh da nicht an Board! Selbst als Spielzeug, macht das keinen Spaß.
Teo D. schrieb: > Udo S. schrieb: > > Egal.... Kursänderung nach Backbord, wie weit wird das Ruder bewegt? > Über 90° oder weniger? Je nach dem muss der Antrieb nach links o. rechts > verstellt werden (kürzerer Weg). Das ist nicht das Problem .Der Antrieb reagiert eigentlich sehr genau und man brauch eigentlich das Stellrad nicht zu beobachten .Das geht schon nach kurzer Übung . Ab WANN soll die Steuerung reagieren, > nach 50, 100ms o. 1s....???? So schnell wie möglich. > Ich geh da nicht an Board! Selbst als Spielzeug, macht das keinen Spaß. Keine Angst ich bin schon tausende Kilometer mit dem Teil gefahren und er kennt auch sehr gut den NO-Kanal oder Non stopp zum Mittelmeer
Bernd R. schrieb: >> Egal.... Kursänderung nach Backbord, wie weit wird das Ruder bewegt? >> Über 90° oder weniger? Je nach dem muss der Antrieb nach links o. rechts >> verstellt werden (kürzerer Weg). > Das ist nicht das Problem .Der Antrieb reagiert eigentlich sehr genau > und man brauch eigentlich das Stellrad nicht zu beobachten .Das geht > schon nach kurzer Übung . Hää... was? Bernd R. schrieb: > Ab WANN soll die Steuerung reagieren, >> nach 50, 100ms o. 1s....???? > So schnell wie möglich. Wann soll die Steuerung entscheiden, das DU fertig bist mit drehen am Stellrad? Vorher reagieren geht ja nicht, sonst währe es ja wieder eine normale Steuerung, also immer in die Richtung verstellen (auch wenns der längere Weg ist) in die du drehst!
Bernd R. schrieb: > Ab WANN soll die Steuerung reagieren, >> nach 50, 100ms o. 1s....???? > So schnell wie möglich. Und in welche Glaskugel soll sie gucken, um zu wissen, in welche Richtung sie loslaufen muss, um den kürzesten Weg zum zukünfigen Ziel der Eingabe zu erwischen. Da hast du ein Kausalitätsproblem. Wenn die Eingabe noch nicht beendet ist, i.e. noch am Knopf gedreht wird, steht das Ziel und damit der kurzeste Weg noch nicht fest. Das ist anders, wenn die Navigationssoftware den neuen Kurs zum nächsten Wegepunkt rüber schickt. Aber darum scheint es ja nicht zu gehen. Und wenn die Kursänderung zu plötzlich kommt, fliegen nur die Tassen.
Ich verstehe Aufgabe so: a) Da gibt es einen motorisierten Antrieb, der ein Zahnrad auf einen bestimmten Winkel drehen soll. Das ganz hat keinen Anschlag, kann im Prinzip endlos weit links und rechts herum drehen. b) Es gibt einen Drehschalter, den man ebenfalls ohne Anschlag in beide Richtungen auf 12 Positionen drehen kann. Dieser gibt die Soll-Position vor. Das motorisierte Zahlrad folgt der Vorgabe des Bedieners verhältnismässig langsam. Wenn der Bediener den Einstellknopf schnell um mehr als 180 Grad dreht, so dass der verbleibende des Zahnrades ebenfalls mehr als 180° beträgt, dann macht es Sinn, den Motor anders herum drehen zu lassen. Beispiel: Ausgangslage: Drehschalter und Motor stehen auf 0 Grad. Jetzt dreht der Benutzer den Schalter rechts herum auf 300 Grad. Anfangs wird der Antrieb rechts herum folgen, zum Beispiel bis 5 Grad. Doch dann merkt die Steuerung, dass anders herum schneller ginge. Darum ändert der Motor nun seine Laufrichtung und dreht um -65 Grad auf die gewünschte Zielposition. Kleine Anmerkung: Die Richtungswechsel kann man wegen der Massenträgheit man nicht abrupt vornehmen. Dafür braucht man signifikant Zeit, die man berücksichtigen sollte.
Stefan ⛄ F. schrieb: > Anfangs wird der Antrieb rechts herum folgen, zum Beispiel bis 5 Grad. > Doch dann merkt die Steuerung, dass anders herum schneller ginge Und wann merke ICH, WIE die Steuerung sich nu entschieden hat? Damit in ne enge Schleuse einfahren? Nein Danke! :) PS: Wenn das Problem erst bei 180° und nicht schon bei 90° auftreten würde, könnte er das doch problemlos der Brain-Steuerung überlassen!
Teo D. schrieb: > Und wann merke ICH, WIE die Steuerung sich nu entschieden hat? Hoffen und beten. Wenn die Eingabe über 12 Taster ginge, könnte die Steuerung sofort wissen, in welche Richtung sie loslaufen muss.
Stefan ⛄ F. schrieb: > Wenn die Eingabe über 12 Taster ginge, könnte die Steuerung sofort > wissen, in welche Richtung sie loslaufen muss. Vorausgesetzt unsere Glaskugeln sind gut geeicht! ;D
Stefan ⛄ F. schrieb: > Anfangs wird der Antrieb rechts herum folgen, zum Beispiel bis 5 Grad. > Doch dann merkt die Steuerung, dass anders herum schneller ginge. Darum > ändert der Motor nun seine Laufrichtung und dreht um -65 Grad auf die > gewünschte Zielposition. Kursänderung nach Stb antäuschen und dann nach Bb drehen - ganz tolle Strategie.
Wolfgang schrieb: > Stefan ⛄ F. schrieb: >> Anfangs wird der Antrieb rechts herum folgen, zum Beispiel bis 5 Grad. >> Doch dann merkt die Steuerung, dass anders herum schneller ginge. Darum >> ändert der Motor nun seine Laufrichtung und dreht um -65 Grad auf die >> gewünschte Zielposition. > > Kursänderung nach Stb antäuschen und dann nach Bb drehen - ganz tolle > Strategie. Stelle ich mir auch "ganz toll" vor. Wenn mein Navi sagt "bitte wenden" tue ich das meistens aus gutem Grund nicht, und schon gar nicht sofort.
Stefan ⛄ F. schrieb: > Ich verstehe Aufgabe so: > > a) Da gibt es einen motorisierten Antrieb, der ein Zahnrad auf einen > bestimmten Winkel drehen soll. Das ganz hat keinen Anschlag, kann im > Prinzip endlos weit links und rechts herum drehen. > > b) Es gibt einen Drehschalter, den man ebenfalls ohne Anschlag in beide > Richtungen auf 12 Positionen drehen kann. Dieser gibt die Soll-Position > vor. > > Das motorisierte Zahlrad folgt der Vorgabe des Bedieners > verhältnismässig langsam. Wenn der Bediener den Einstellknopf schnell um > mehr als 180 Grad dreht, so dass der verbleibende des Zahnrades > ebenfalls mehr als 180° beträgt, dann macht es Sinn, den Motor anders > herum drehen zu lassen. > > Beispiel: > > Ausgangslage: Drehschalter und Motor stehen auf 0 Grad. > > Jetzt dreht der Benutzer den Schalter rechts herum auf 300 Grad. Die Aufgabe wurde von Dir richtig dargestellt.! > > Anfangs wird der Antrieb rechts herum folgen, zum Beispiel bis 5 Grad. > Doch dann merkt die Steuerung, dass anders herum schneller ginge. Darum > ändert der Motor nun seine Laufrichtung und dreht um -65 Grad auf die > gewünschte Zielposition. Dieses darf natürlich nicht erfolgen ! > > Kleine Anmerkung: Die Richtungswechsel kann man wegen der Massenträgheit > man nicht abrupt vornehmen. Dafür braucht man signifikant Zeit, die man > berücksichtigen sollte. Das ist nicht richtig, denn auch bei Richtungswechsel wird weiter Schub erzeugt . Bei einer Verwendung mit Dieselmotor kann man die Leistung durch eine Drehzahlreduzierung bei Bedarf auch reduzieren .
Bernd R. schrieb: > Dieses darf natürlich nicht erfolgen ! Dann musst einen Hellseher einbauen, der während des Drehens des Schalters weiß, wo der Benutzer stoppen wird. Ich habe gerade mal bei Conrad und Reichelt geschaut, die haben gerade keine Vorrätig. Muss wohl an der Corona Kriese liegen. Jetzt sind wir wieder ganz am Anfang :-( Könnte das der Grund sein, warum offenbar noch kein Hersteller ein derartiges Produkt zur Marktreife gebracht hat?
Die Antriebsteuerung hat in einen 44` Katamaran zu vollen Zufriedenheit funktioniert !!!!!! Die Steuerung war eine Einzelanfertigung mit Drehschaltern mit 12 Stellungen und ist leider nicht mehr verfügbar. Leider kann auch der Hersteller keinen Ersatz liefern. Deshalb hier meine Frage im Forum an die Spezialisten ob es eine Lösung zu einer fertigen Steuereinheit gibt. Bei der Verwendung von Drehgeber die man endlos drehen kann ,braucht man keine Lösung für die kürzesten Drehwinkel .
>> >> Beispiel: >> >> Ausgangslage: Drehschalter und Motor stehen auf 0 Grad. >> >> Jetzt dreht der Benutzer den Schalter rechts herum auf 300 Grad. > > > Die Aufgabe wurde von Dir richtig dargestellt.! Bis mir nicht erklärt wird was der Sinn einer solchen Benutzereingabe ist, halte ich solch einen Benutzer für Schwachsinnig. (Ungeschult?) Warum erfolgt nicht gleich die Eingabe mit 2 Schritte linksrum von 0 auf 300 Grad? Wenn der Stufenschalter einen Anschlag hat der dies verhindert, ist der Anschlag zu entfernen oder eine Anschlagloser Stufenschalter zu verwenden. >> Kleine Anmerkung: Die Richtungswechsel kann man wegen der Massenträgheit >> man nicht abrupt vornehmen. Dafür braucht man signifikant Zeit, die man >> berücksichtigen sollte. > > Das ist nicht richtig, denn auch bei Richtungswechsel wird weiter Schub > erzeugt . Bei einer Verwendung mit Dieselmotor kann man die Leistung > durch eine Drehzahlreduzierung bei Bedarf auch reduzieren . Ist ein soweit unausgesprochenes (neben-)Ziel, zu schnelle/zu extreme Benutzereingaben zu verhindern? Ist dies etwa auch abhängig von der aktuellen Vortriebsleistung? (bei Drehzahlreduzierung schneller möglich als bei Voller Drehzahl?) Soll die per Foto gezeigte Paddelkonstruktion nicht überlastet werden, etwa durch verhindern einer plötzlichen vollen Schubumkehr? (ja sowas kann ein Manntragender Hubschrauber nicht, VSA von Schubbugsiere aber sehr wohl --> u.a. Hamburger Hafenfest: "tanzaufführung" durch Schubbugsiere. Trotzdem ist die zyklische Blattsteuerung von Helirotor und VSA vom Grundprinzip her gleich)
Mit dem Richtungswechel geht es mit gar nicht um den Schub! Es geht darum, dass man den Antriebsmotor dieses Zahnrades nicht einfach erst links herum und dann ohne Pause rechts herum drehen lassen kann! Das Getriebe würde sich dabei die Zähne heraus brechen (früher oder später). Wer mag, kann das ja mal mit irgendeinem anderen elektrischen Antrieb testen, zum Beispiel einer Seilwinde oder einem Akkuschrauber.
Bernd R. schrieb: > Bei der Verwendung von Drehgeber die man endlos drehen kann ,braucht man > keine Lösung für die kürzesten Drehwinkel . JA BEIM VERIRRTEN LADUNGSTRÄGER NOCHMAL!!! Schreib doch gleich dass die Erstausrüstung MURKS war! Stufendrehschalter ohne Anschlag (endlos drehbar) sind Gang und Gäbe! Ich bin raus...
Stefan ⛄ F. schrieb: Könnte das der Grund sein, > warum offenbar noch kein Hersteller ein derartiges Produkt zur > Marktreife gebracht hat? Nein das nicht .Der Hersteller SPW , hat auch für einen erweitertes Modell (einziehbar) während des "Salon Nautique de Paris" im Innovationswettbewerb der Messegesellschaft den den 1. Preis bekommen. Vielleicht waren es aber die Preisvorstellungen im 5 stelligen DM Bereich .
Bernd R. schrieb: > Der Hersteller SPW , hat auch für einen erweitertes Modell Wie verhält sich das denn, wenn man den Schalterverdreht? Läuft der Motor sofort los? Auch immer in die richtige Richtung, oder nur zu 50% ? Ich meine, 50% Trefferquote sind immerhin besser als immer falsch :-) Wenn du heraus findest, wie sich dieses Ding verhält, dann kannst du das nachbauen. --- Kleiner Spaß am Rande: Wusstet ihr, das man die Wettervorhersage mit einem dreifarbigen Würfel erstellen kann? rot = es wir schlechter gelb = es bleibt ungefähr so grün = es wird schöner Die Trefferquote ist genau so hoch, wie beim offiziellen Wetterbericht. Nur weniger "wissenschaftlich".
Stefan ⛄ F. schrieb: > Mit dem Richtungswechel geht es mit gar nicht um den Schub! > > Es geht darum, dass man den Antriebsmotor dieses Zahnrades nicht einfach > erst links herum und dann ohne Pause rechts herum drehen lassen kann! > Das Getriebe würde sich dabei die Zähne heraus brechen (früher oder > später). > > Wer mag, kann das ja mal mit irgendeinem anderen elektrischen Antrieb > testen, zum Beispiel einer Seilwinde oder einem Akkuschrauber. Aber wie weit dreht sich ein Scheibenwischermotor , dem ein weiteres Schneckengetriebe nachgeschaltet ist ( wie mein erste Bild zeigt )bei Abschaltung der Spannung ?
Warum sollte man denn den Geberschalter statt "richtig" herum einen größeren Winkel in der "falschen" Richtung drehen und einer Steuerung die Korrektur überlassen? Es ist doch viel sinnvoller, gleich den kleineren Winkel in der richtigen Richtung zu drehen.
isr am schalter startet einen timer von ungefähr ner halben sekunde, in dieser halben sekunde passiert nix der Benutzer hat zeit die Schalterposition zu finden danach gilt für einen 12stufigen schalter: istposition plus oder minus fünf (mod12) geben die Richtung vor ist istStellung also sagen wir 5 dann sind 6,7,8,9,10 rechtsherum 4,3,2,1 und 12 linksherum 11 ist ambivalent ist die istStellung sagen wir 8 sind 9,10,11,12,1 rechtsherum und 7,6,5,4,3 linksherum, 2 ist ambivalent und kann rechts wie links angefahren werden
1 | // nach trigger 0.5sek auf schalterendstellung warten |
2 | soll = schalterlesen(); |
3 | int egal = (ist+6)%12; |
4 | if(soll > egal || soll < ist) |
5 | linksherum(soll); |
6 | else |
7 | rechtsherum(soll) |
8 | ist = soll; |
ist doch sooo schwierig nicht, oder? 'sid
sid schrieb: > > > ist istStellung also sagen wir 5 dann sind 6,7,8,9,10 rechtsherum > 4,3,2,1 und 12 linksherum 11 ist ambivalent > ist die istStellung sagen wir 8 sind 9,10,11,12,1 rechtsherum und > 7,6,5,4,3 linksherum, 2 ist ambivalent und kann rechts wie links > angefahren werden > // nach trigger 0.5sek auf schalterendstellung warten > soll = schalterlesen(); > int egal = (ist+6)%12; > if(soll > egal || soll < ist) > linksherum(soll); > else > rechtsherum(soll) > ist = soll; > > ist doch sooo schwierig nicht, oder? > > 'sid Klingt auch für mich überzeugend und welche Steuerung macht sowas ?
So hast du aber 0,5 Sekunden vergeudet. Es sollte doch besonders schnell gehen - habe ich zumindest so verstanden.
Dieter W. schrieb: > Warum sollte man denn den Geberschalter statt "richtig" herum > einen > größeren Winkel in der "falschen" Richtung drehen und einer Steuerung > die Korrektur überlassen? > > Es ist doch viel sinnvoller, gleich den kleineren Winkel in der > richtigen Richtung zu drehen. Es gibt aber auch auf einen Schiff manche gefährliche Notsituation bei Sturm und Gegenverkehr im Kanal wo man die richtige Drehrichtung benötigt.
Mir erschließt sich der Sinn eines Stufenschalters nicht. Wenn das Eingabeelement ein Poti ohne Anschlag ist, und auf der Welle die die Flügel sellt, auch ein "endloses" Poti ist, kann man mitels einfacher Analogschaltung ein Nachstellen erreichen. Der Bediener muss halt wissen in welcher Richtung er den Sollwertgeber bewegt. Ein Ledkranz um den Sollwertgeber meldet den Istwert zurück. Sollte digital mit entsprechenden Encodern ebenso funktionieren. Es muss halt die Reglerkurve richtig eingestellt werden.
Bei dieser Beschreibung des Antriebes und der Aussage das es bereits funktioniert hat, kann ich mir nur vorstellen, das es bei den Schaufelstellung 4 Sektoren gibt, bei der es bei einem Übergang der Sektoren darauf ankommt, aus welcher Richtung dies geschieht. Es sich also nur um eine Richtungsumkehr des Stellantriebes, bei JEDEM Sektorübergang handelt. Das wäre relativ simpel, ohne Prozessoren oder sonstigen komplizierten Scheiß zu realisieren (nur kurz Bremsen, siehe Stefans Hinweis) . Das Verhalten wäre auch immer das Gleiche, ohne Überraschungen. Mir deucht auch, das dann der Antrieb immer auf der selben Seite erfolgt!?
PID schrieb: > Mir erschließt sich der Sinn eines Stufenschalters nicht. Wenn das > Eingabeelement ein Poti ohne Anschlag ist, und auf der Welle die die > Flügel sellt, auch ein "endloses" Poti ist, kann man mitels einfacher > Analogschaltung ein Nachstellen erreichen. Der Bediener muss halt wissen > in welcher Richtung er den Sollwertgeber bewegt. Ein Ledkranz um den > Sollwertgeber meldet den Istwert zurück. Sollte digital mit > entsprechenden Encodern ebenso funktionieren. Es muss halt die > Reglerkurve richtig eingestellt werden Es soll sich um eine Steuerung handeln die im Handel zu erwerben ist.
Proffessor schrieb: > Humbug ist ja bekanntermassen am schwersten zu realisieren. Naja, das erledigen die Designer von diversen Gimmicks quasi nebenbei in unvorstellbarer Treffsicherheit. Nur Humbug, der genau so humbugig sein soll wie vorgegeben, ist schwierig. wendelsberg
Bernd R. schrieb: > Klingt auch für mich überzeugend und welche Steuerung macht sowas ? Naja jede die einen programmierbaren microcontroller nutzt ;) Stefan ⛄ F. schrieb: > So hast du aber 0,5 Sekunden vergeudet. Es sollte doch besonders schnell > gehen - habe ich zumindest so verstanden. geb ich Dir recht, man kann aber ebenfalls nach jedem isr des Schalters eine deutlich geringere Wartezeit stellen sagen wir 100ms mit reset dann dreht man +1 in 0 (erster auslöser) +2 in sagen wir 6ms (man hat ja schwung) 3 und 4 auch und fünf in 50ms weil man abbremst bisher also 68ms dann wartet das Ding für 100ms und löst aus hat man bisserl was gewonnen.. aber warten solange man dreht muss das Dingen ja eh damit der positionsschalter nicht "zu früh" auslöst. wenn man sich für flink im Handgelenk hält, kann man die Wartezeit ja auch noch kürzer programmieren (50ms pro schritt max zB oder 150 total oder oder oder) Müsste man mal son paar rotationen mit nem testschalter machen um den sweetspot zu finden, geht ja nur um die Idee wie ein Positionsschalter in einer solchen Situation noch Sinn machen kann (eben einzelschritte ignorieren durch kurze Wartezeit vor dem setting) Ich denke "gewöhnliches" incode debouncing alleine sollte fast schon reichen, wenn die schaltstellung sagen wir zehnmal in folge gelesen wird muss man nur so schnell drehen, dass spätestens "neun" einen anderen Wert liefert ;) Man könnte auch (wär aber dusselig IMHO) den Schalter selbst mit einem kapazitiven Sensor ausstatten, solange man das Dingen festhält kann man drehen wie man will, ausgelöst wird erst beim loslassen. Wie auch immer, ich glaube das ist generell machbar, eben in dem man den sich noch bewegenden Schalter ignoriert; Und wenn wir mal ehrlich sind, auf nem Boot ist die Ruderstellung ja eh nur ein gut gemeinter Vorschlag und fernab vom Imperativ eines quer zur Fahrtrichtung stehenden Pneus auf Asphalt. Ich glaub nicht, dass da Bruchteile von Sekunden nennenswerte Unterschiede machen. ob der Kahn n zwanzig oder ein zwanzigkommavier Meter Wendekreis hinlegt ist auf dem Wasser in der Regel nicht relevant (und in der marina ist man eh so langsam unterwegs dass der Unterschied nur kleiner wird) 'sid
hallo , ich bin jetzt wieder an das Stellglied der alten Steuerung gekommen Es ist der Siemens EBE 46-353-3 Dieser decodiert 16 Stellungen .Vielleicht hat schon jemand damit gearbeitet ? Hier mal ein Video des Antriebs in einem Boot. Man sieht auch ein Schema . Zuletzt der große Vorteil des Antriebs beim " einparken" .https://www.youtube.com/watch?v=8wb7TgF4nPU&t=7s
das'n schalter.. was willste denn jetzt wissen? Ob jmd von uns schon mit schaltern gearbeitet hat kann ja kaum die Frage sein. und den geistesschritt von mod5 für 12pos zu mod7 für 16pos trau ich Dir auch alleine zu... Ich versteh nicht was Du uns mit deiner Ergänzung versuchst zu fragen. 'sid
die Vorschläge Potis mit oder ohne feste Stellungen . Die Verwendung des EBE 46-353-3 ist doch einen spezielle duale Steuerungsvariante die hier noch nicht diskutiert wurde .Diese ermöglicht ja auch ein schalten von Stellung 1 linksrum auf 16 .
Bernd R. schrieb: > EBE 46-353-3 ist doch einen spezielle duale Steuerungsvariante die > hier noch nicht diskutiert wurde .Diese ermöglicht ja auch ein schalten > von Stellung 1 linksrum auf 16 . Das ist ein Drehschalter ja den kann man linksrum drehen, wie viele Andere auch.. Steuerung ist das keine, nur n dummer schalter! Und dem code ist egal wierum du den schalter drehst. ich wiederhole: WAS ist Deine Frage? 'sid
Bernd R. schrieb: > das System in Stellung 2 steht und der Betätigungsschalter auf > Stellung 11 gestellt wird ,der kürzeste Weg also Linkslauf gesteuert > werden. Bernd R. schrieb: > Das würde aber auch > bedeuten , das ich auch nicht von einer Nullstellung gegen den > Uhrzeigersinn > von 1 auf 100 kohm schalten kann. Bernd R. schrieb: > Mein Problem bei der Steuerung des Stellmotors ist ein Zeitproblem von > den Steuerungsverlauf von z.B. Position 1 in 12. Bernd R. schrieb: > Stefan ⛄ F. schrieb: >> Ich verstehe Aufgabe so: >> Ausgangslage: Drehschalter und Motor stehen auf 0 Grad. >> Anfangs wird der Antrieb rechts herum folgen, zum Beispiel bis 5 Grad. >> Doch dann merkt die Steuerung, dass anders herum schneller ginge. Darum >> ändert der Motor nun seine Laufrichtung und dreht um -65 Grad auf die >> gewünschte Zielposition. > > Dieses darf natürlich nicht erfolgen ! sid schrieb: > ich wiederhole: > WAS ist Deine Frage? blickt noch einer durch? ich jedenfalls nicht mehr!
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.