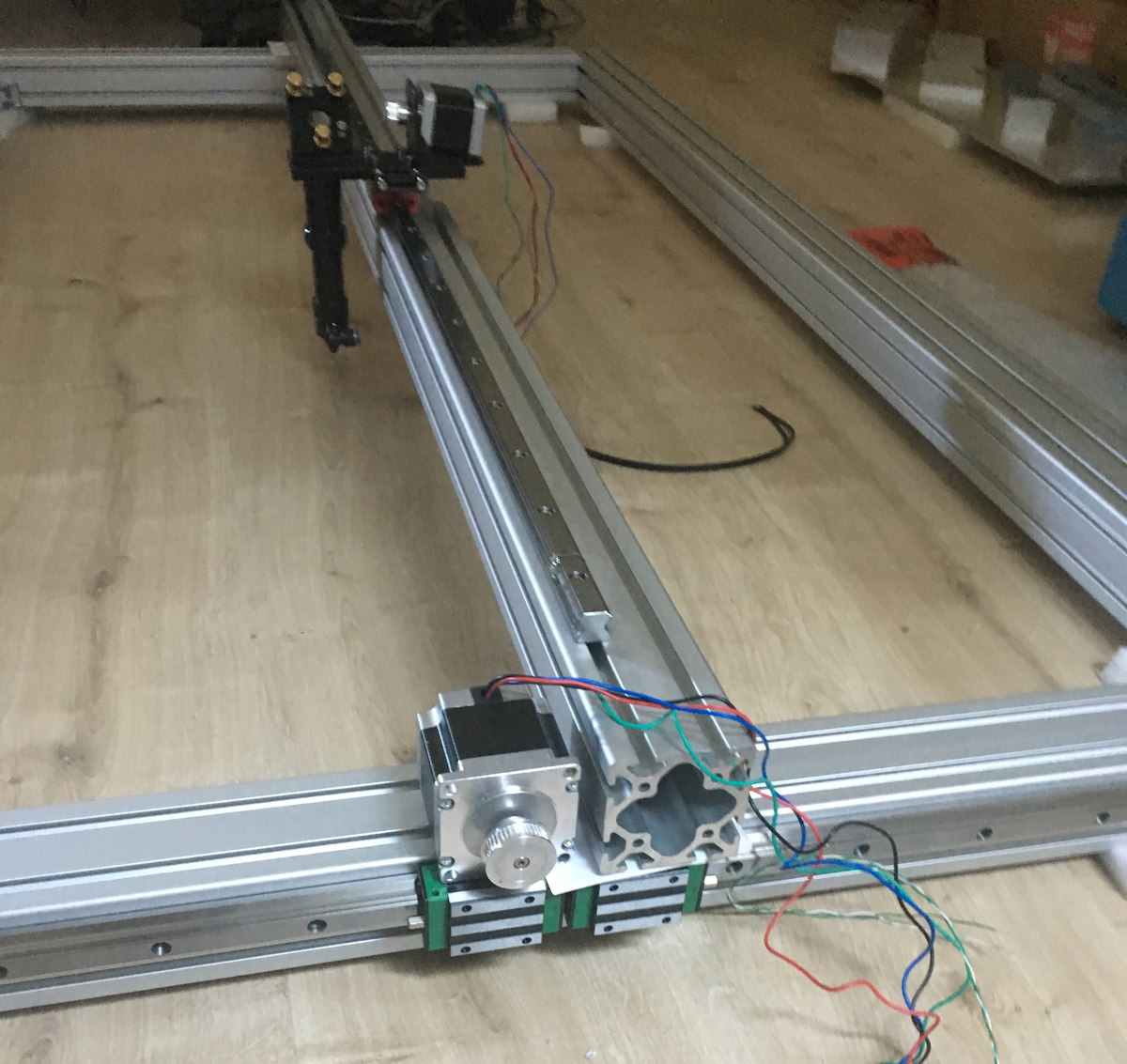
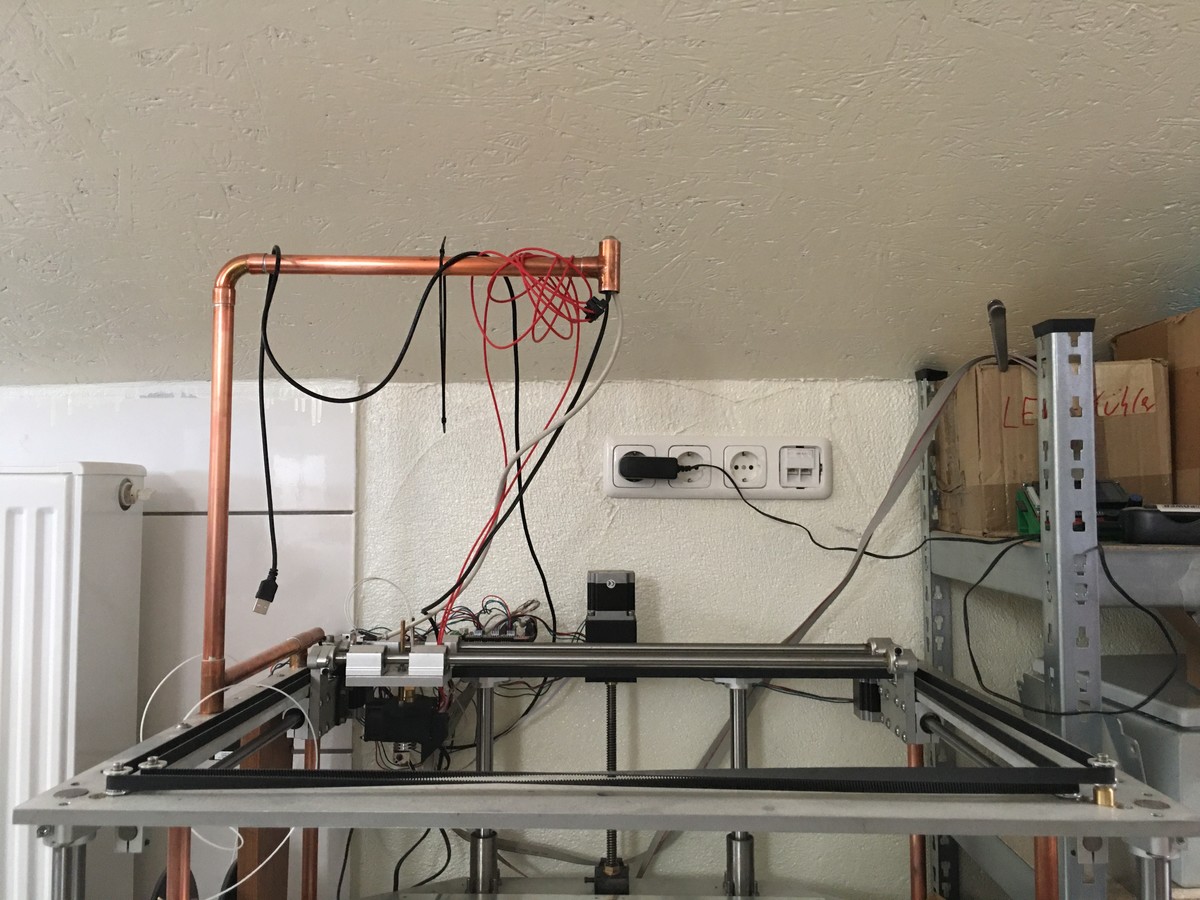
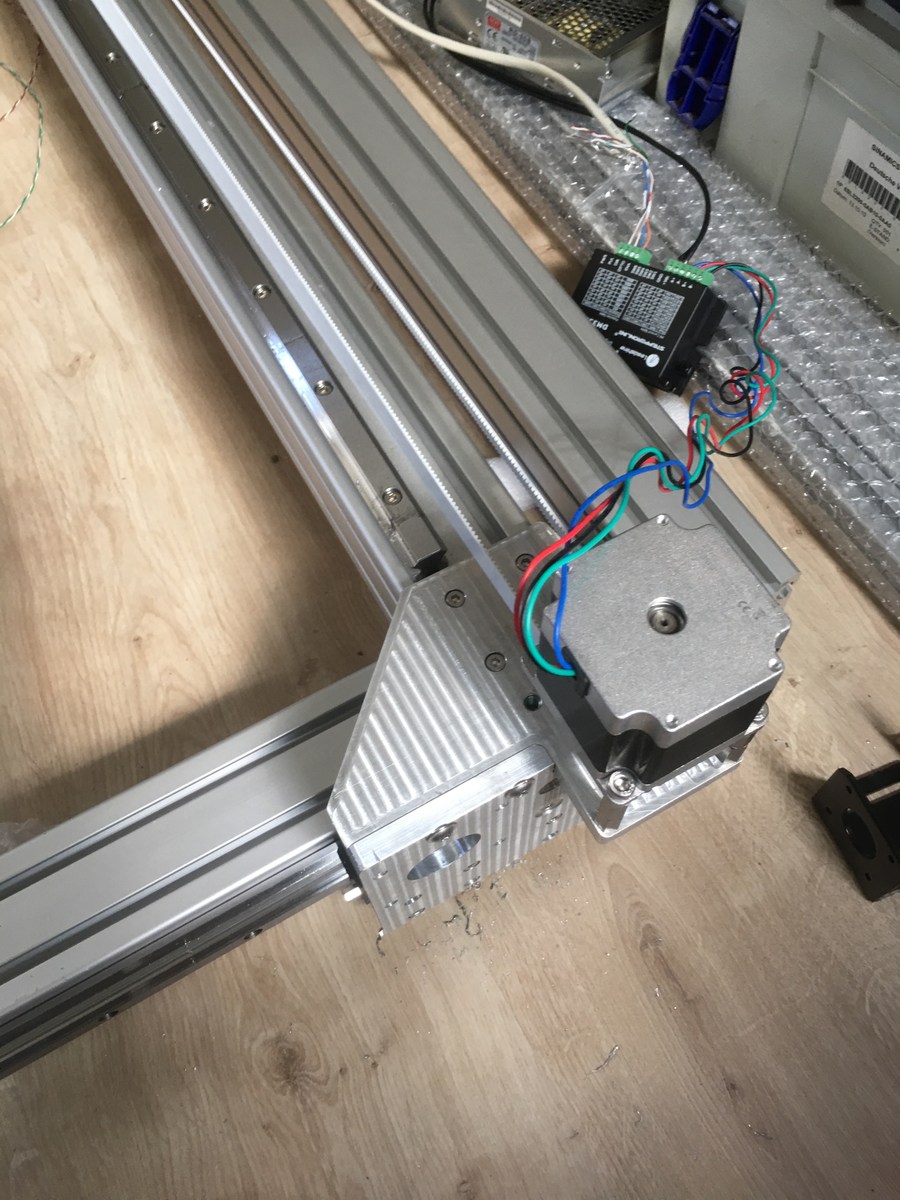
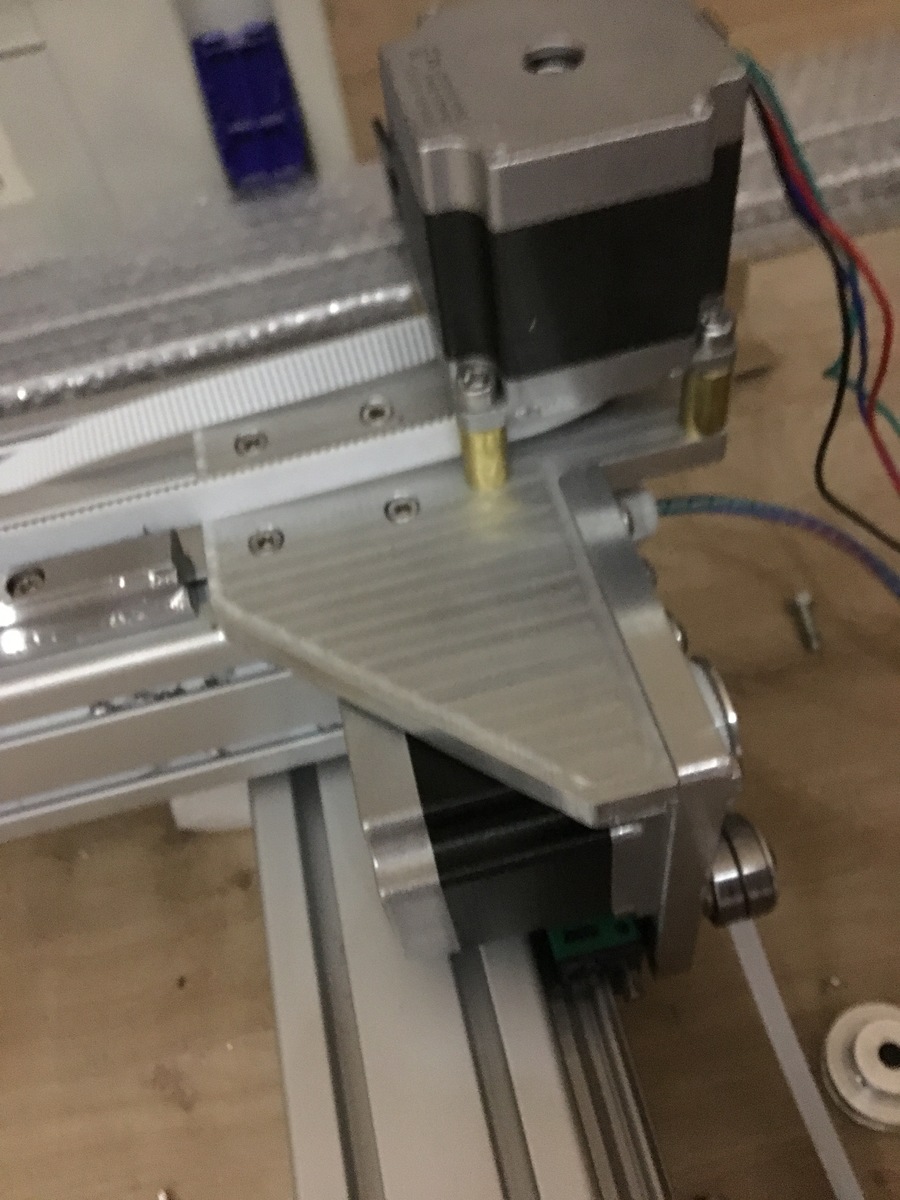
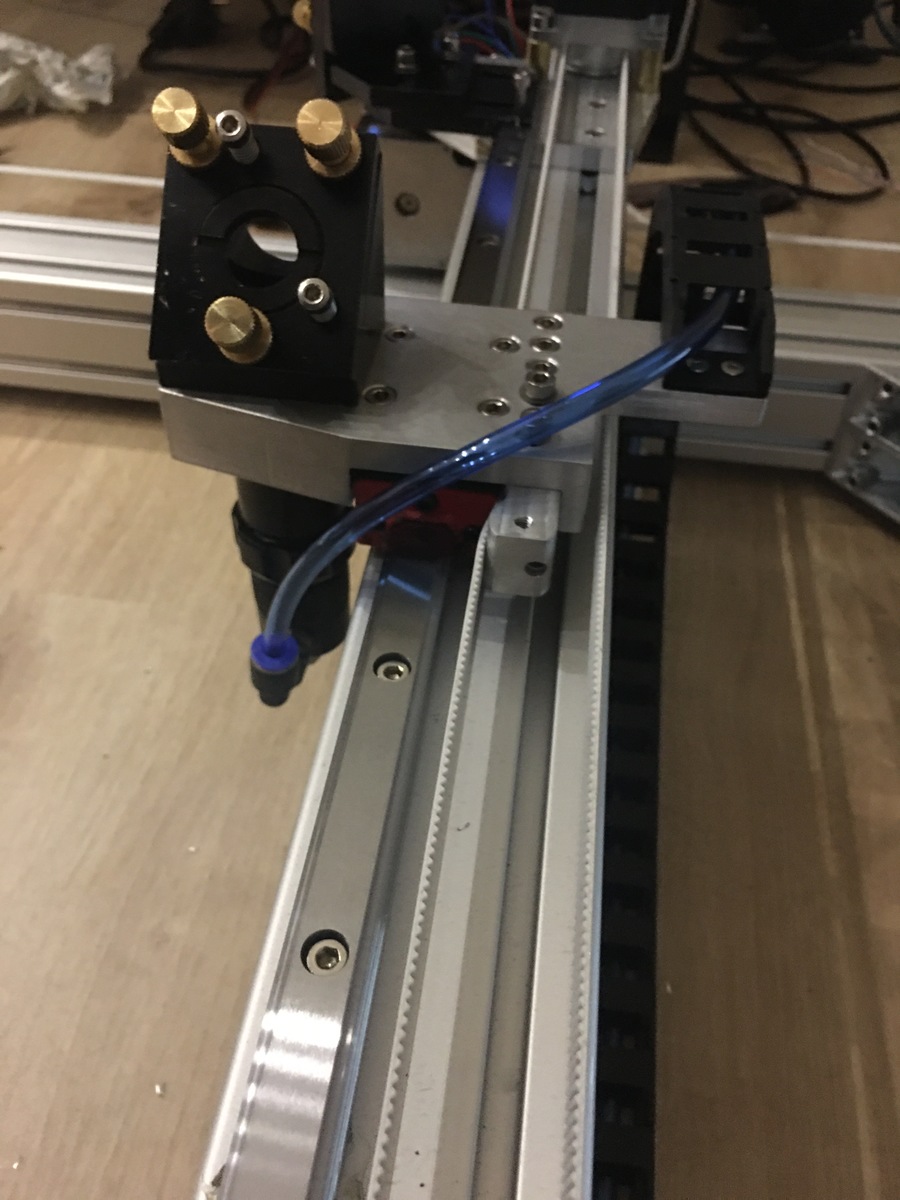
Mahlzeit, bräuchte mal ein paar konstruktive Meinungen. Bin dabei meinen Maschinenpark mit einem Co2-Laser-Cutter zu komplettieren (falls ein Maschinenpark überhaupt jemals "komplett" sein kann ;-) Die grundsätzlichen Abmessungen sind festgelegt und diesmal ist die Konstruktion auch bewusst einfach und kostengünstig gehalten (es kommen gewöhnliche Alu-Profile zum Einsatz, die auch gestern schon angekommen sind, siehe Bild). Gebaut wird zunächst das nackte Portal, Einhausung, Tisch und Absaugung kommen später. Soviel zur bisherigen Planung: Für die kürzere Achse (Y) mit etwas über 620mm Verfahrweg kommen beidseitig Laufkatzen mit Nema23 und gt2 Zahnriemen mit Stahlkern zum Einsatz. Ich möchte nun kurzfristig die Portalwangen fräsen und bin mir bei der langen (X) Achse unschlüssig ob ich hier einen Linearschlitten oder doch eine Laufkatze wählen sollte. Zum Schneiden wäre es sicher unerheblich, aber auf der Achse soll auch für die Rastergravur abgezeilt werden... Die Achse hat einen Verfahrweg von ca. 1450mm. Bei Wahl eines Linearschlittens mit einseitigem Antrieb kann der Lasttrum also über 3m lang werden, das ist mir eigentlich etwas lang, vor allem in Verbindung mit den hohen Beschleunigungswerten. Allerdings ist dies der Standardaufbau bei ähnlichen Anlagen und die entsprechenden Klemmhalter wären am Schlitten sogar schon dran. Bei beidseitigem Antrieb bliebe der Lasttrum halb so lang, dann ist aber wieder doppelt so viel Technik nötig und es stellt sich abermals die Frage welcher Motor springt wohin wenn man einschaltet... dem kann man sicher "entgegenwirken" aber ist zusätzlicher Aufwand. Setze ich auf die Laufkatze, bleibt der Lasttrum ebenfalls kurz und ich brauche nur die hälfte der Technik. Dafür muss ich den Stepper immer mit beschleunigen, macht bei einem gerade passend rumliegenden Nema17 (0.9°/1.7A) gute 400g Masse extra. Lieber wäre mir ohnehin eine Nummer größer (schon allein der dickeren Welle wegen), aber dann sind mindesten 700g fällig, dass dürfte die Performance stark reduzieren. (Energiekette muss ich ohnehin anbringen für die Luftunterstützung) Hat jemand einen ähnlichen Aufbau im Betrieb und kann mich in die richtige Richtung weisen? Gruß Dominik P.S.: Zum Thema Laser und den damit verbundenen Gefahren gibt es hier ausreichend Info: https://www.baua.de/DE/Angebote/Publikationen/Praxis/A37.pdf
Angehängte Dateien:
-

IMG_9715.JPG
230 KB
Der Motor auf dem Schlitten auf dem der Laserkopf sitzt, ist dort falsch platziert. Dort gilt die Devise, so leicht wie möglich, anderseits wir das Rastern später sehr Zäh. Von der Geschwindigkeit am besten 1:2 oder 1:3 Untersetzung, Motor fest an der Seite angebaut. Riemen 9mm breit, dann kann der auch die 1,5m ordentlich gespannt werden ohne das es da Probleme gibt. Ich bin an der Stelle (ähnlichen Laserdimensionen)mit einem NEMA23 gefahren.
Warum denn Überhaupt das Portal über die Lange Achse? Warum nicht über die Kurze...Das spart Gewicht und erhöht die Stabilität, denke du könntest auch einiges an Material beim Profil Sparen.
Sly_marbo schrieb: > Warum denn Überhaupt das Portal über die Lange Achse? Wegen dem Rastern, somit ist die "schnelle" Achse lang, bringt Vorteile bei der Bearbeitung. Bei großen Arbeiten muss nicht oft Abgebremst und Beschleunigt werden. Das Gewicht der Achse Stört nicht, nur der Schlitten auf dem der LAserkopf sitzt, muss leicht und flink sein.
Angehängte Dateien:
-

PortalWangen.jpg
210 KB -

AntriebX.jpg
170 KB
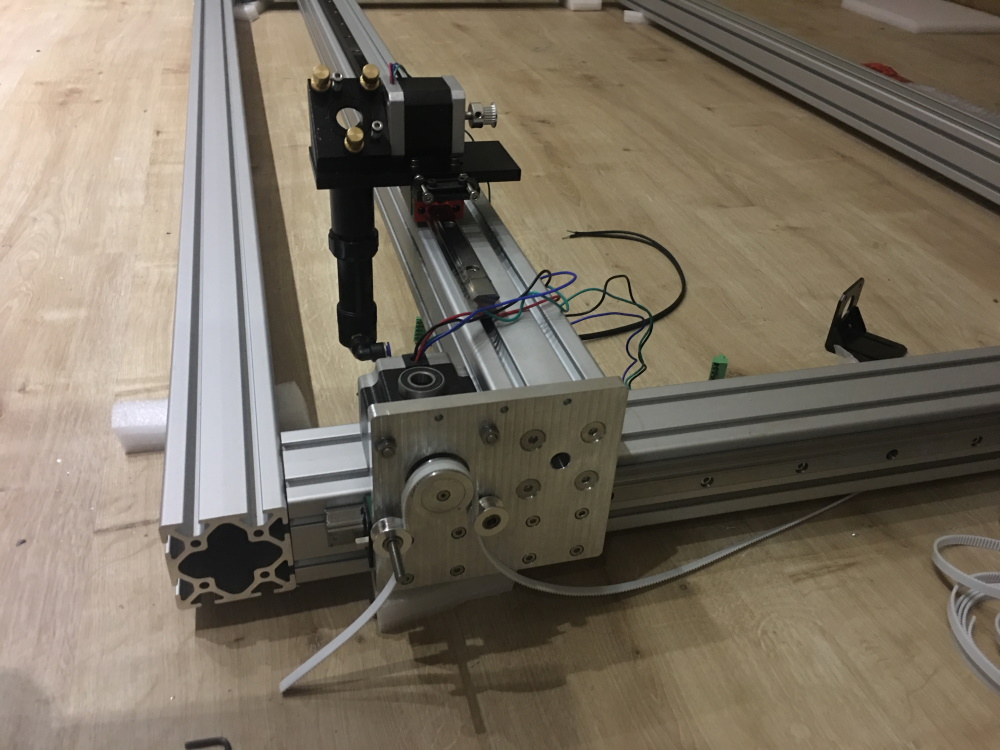
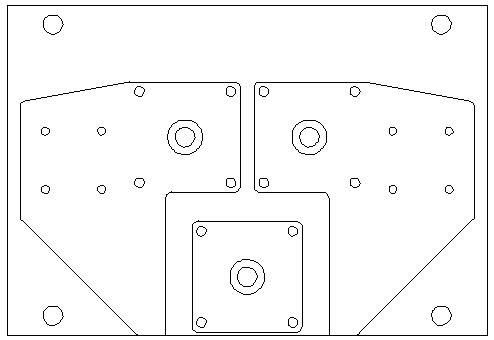
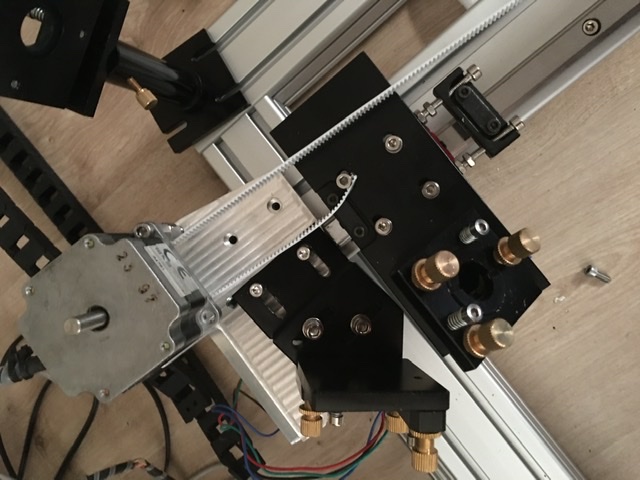
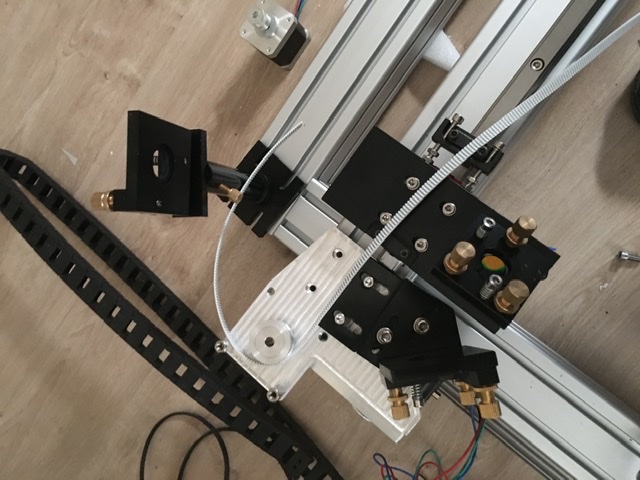
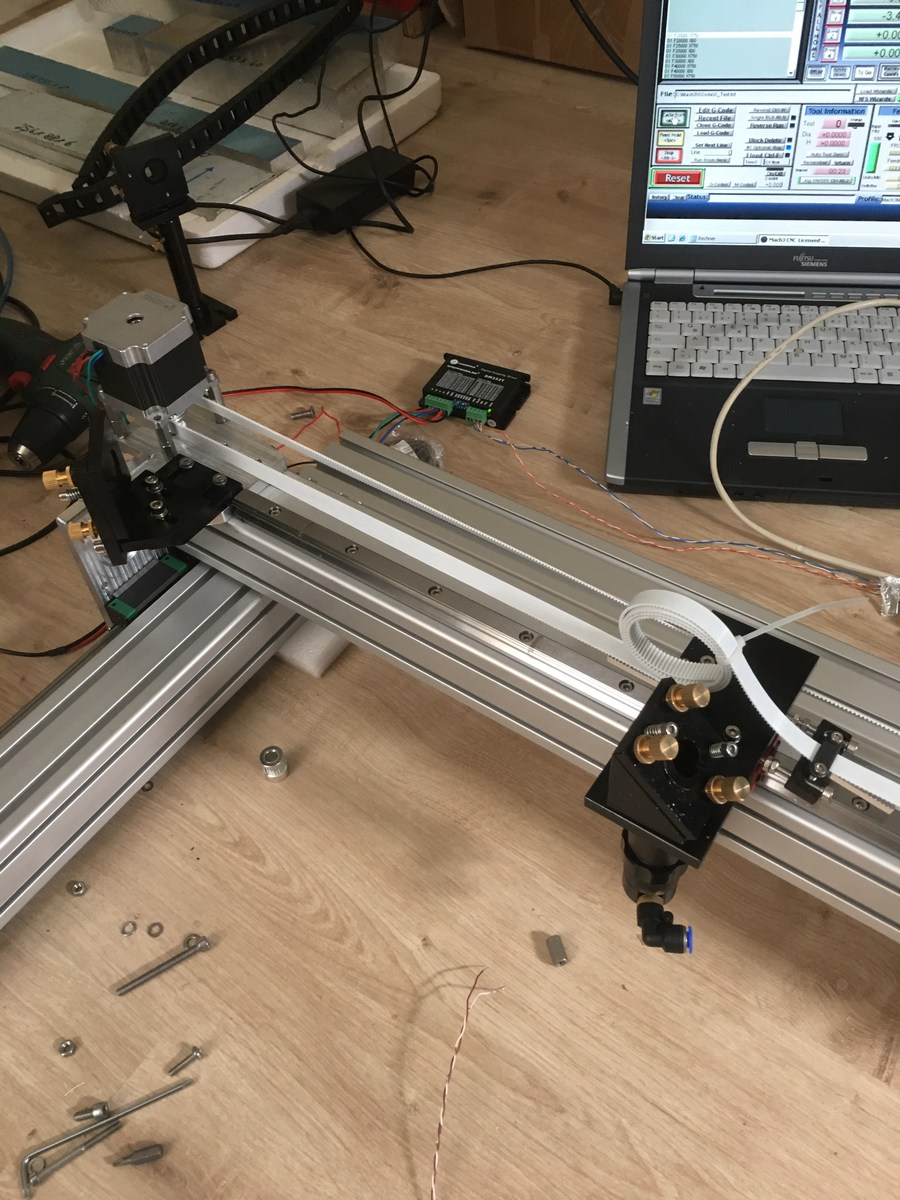
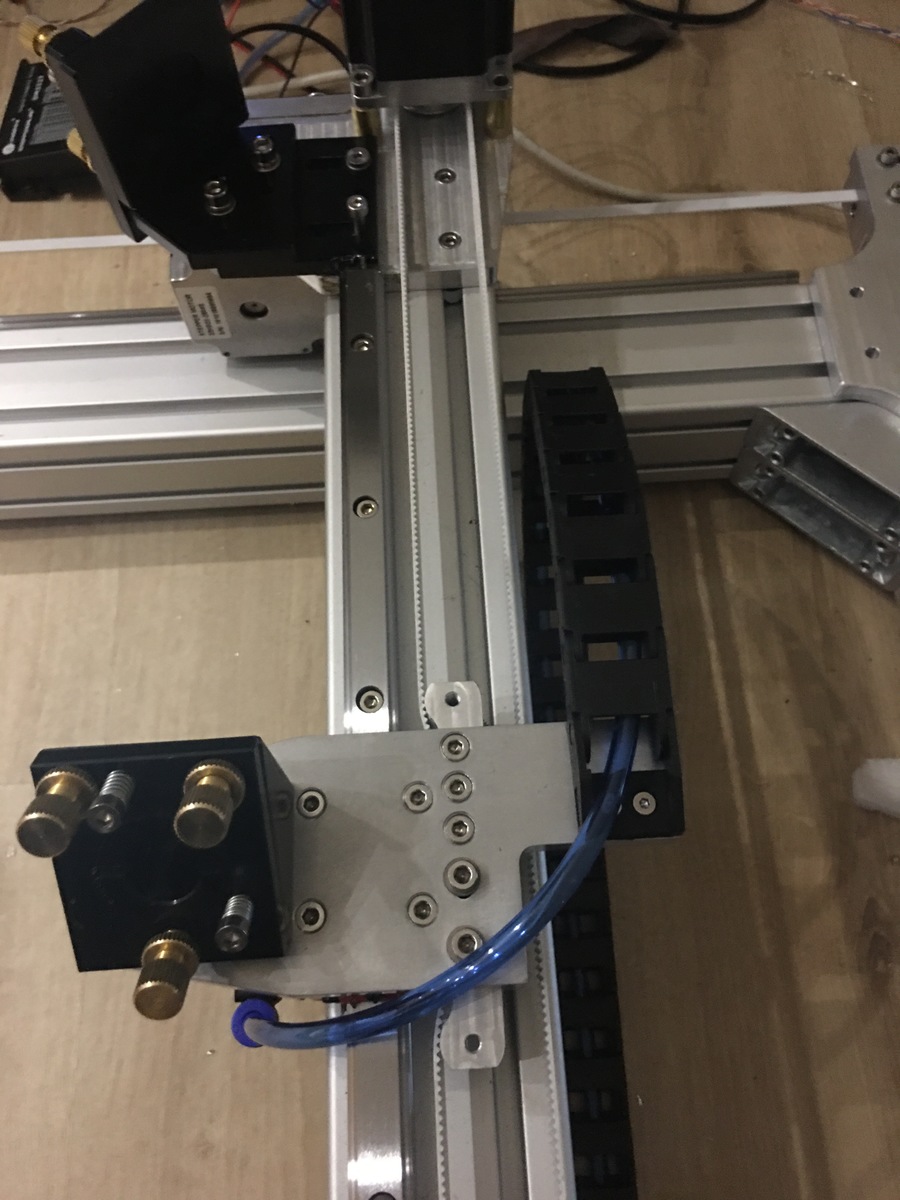
Weihnachtsmann schrieb: > Sly_marbo schrieb: >> Warum denn Überhaupt das Portal über die Lange Achse? > > Wegen dem Rastern, somit ist die "schnelle" Achse lang, bringt Vorteile > bei der Bearbeitung. Bei großen Arbeiten muss nicht oft Abgebremst und > Beschleunigt werden. So auch mein Gedanke, und grundsätzlich geht ja die ganze Fragestellung in diese Richtung. Ganz zu schweigen vom Bauraum, erstmal kommt ne 60W Röhre rein, maximal würde so ne (ungefaltete) 150W Röhre passen. Aber selbst die 60er braucht mit dem ersten Spiegel schon über einen Meter Platz. Weihnachtsmann schrieb: > Das Gewicht der Achse Stört nicht, nur der Schlitten auf dem der > LAserkopf sitzt, muss leicht und flink sein. Habe gestern die Portalwangen gefräst (siehe Anhang, kommen aber Kugellager hin, nicht die Spielzeug-Röllchen) und mir beide Möglichkeiten offen gehalten. Ich denke aber ich gehe auch den Weg mit dem Schlitten. Überlege allerdings ob ich den Antrieb hinter den Portalbalken lege, ist wesentlich einfacher zu konstruieren und ich komme mit dem Strahlengang nicht ins Gehege (2.Anhang, der Nema17 ist nur symbolisch). Nur der Hebel am Schlitten wird dann ziemlich groß wenn ich nicht zusätzliche Umlenkrollen einplane. Du hast nicht zufällig ein Bild von Deinem Aufbau griffbereit? Weihnachtsmann schrieb: > Von der Geschwindigkeit am besten 1:2 oder 1:3 Untersetzung, Motor fest > an der Seite angebaut. Riemen 9mm breit, dann kann der auch die 1,5m > ordentlich gespannt werden ohne das es da Probleme gibt. Ich bin an der > Stelle (ähnlichen Laserdimensionen)mit einem NEMA23 gefahren. Mit gt2 Riemen? (3m gibt's ja glaube standardmäßig gar nicht schmaler). Mir wäre der gt2 ohnehin lieber, die Teilung ist halt sehr schön passend zu den gängigen Schrittmotoren. Gruß Dominik
Angehängte Dateien:
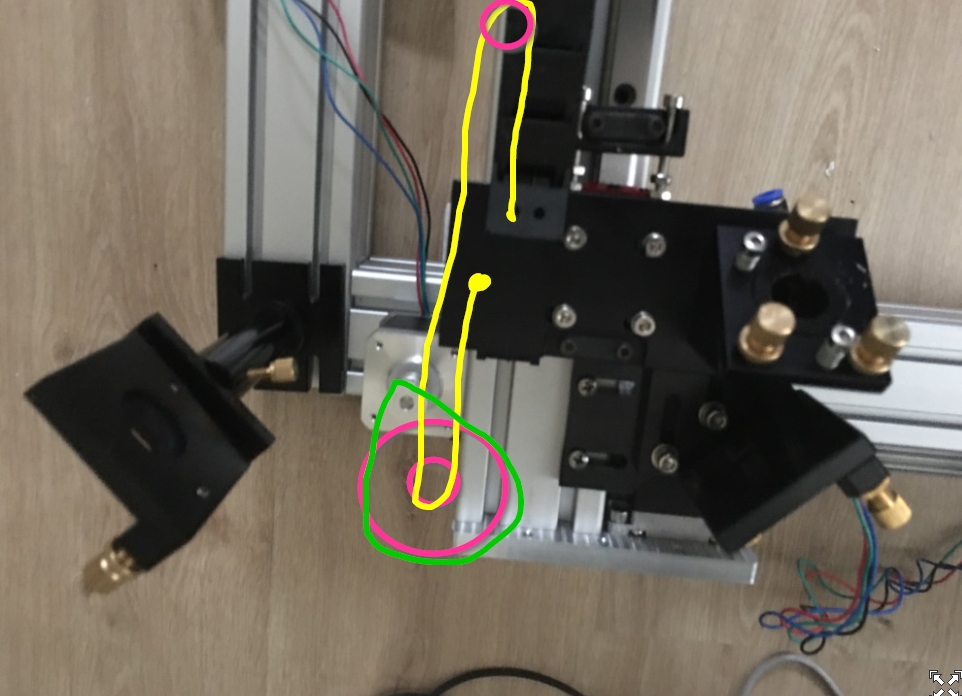
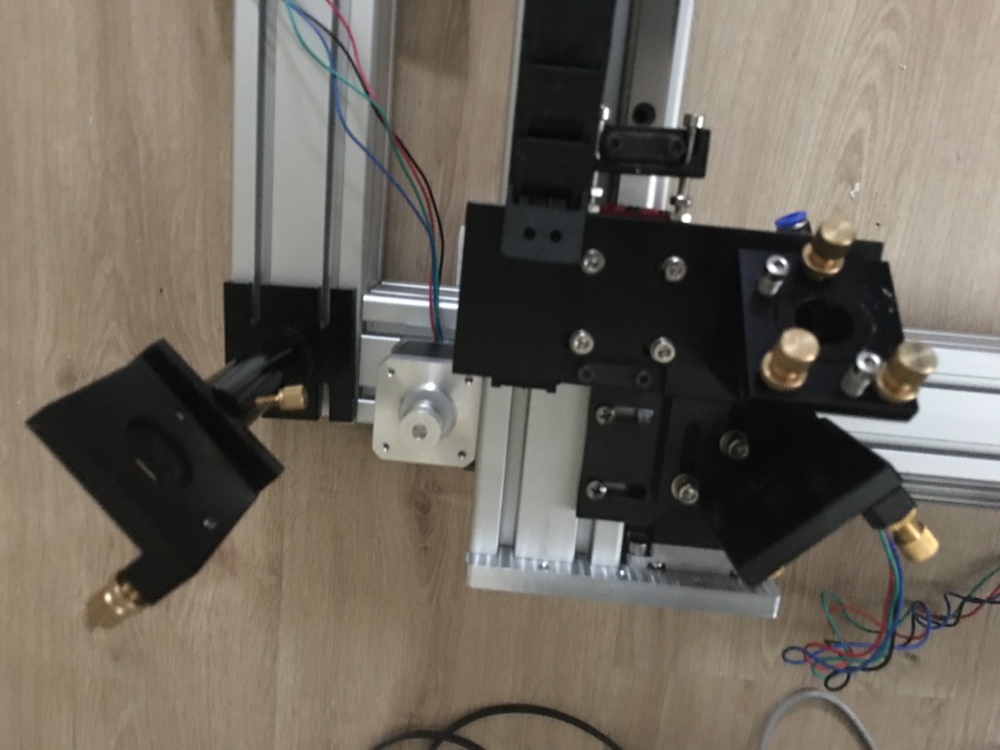
Dominik V. schrieb: > Du hast nicht zufällig ein Bild von > Deinem Aufbau griffbereit? Kann ich heute Abend nachreichen. Ich habe meinen Motor wie auf einem deiner Bilder angeordnet und arbeite mit einem kleinen Riemen. Dem langen (gelben) habe ich direkt am Schlitten angebracht habe, somit ist wenig "Hebel". Dominik V. schrieb: > Mit gt2 Riemen? (3m gibt's ja glaube standardmäßig gar nicht schmaler). > Mir wäre der gt2 ohnehin lieber, die Teilung ist halt sehr schön passend > zu den gängigen Schrittmotoren. Bei mir ist eine 150W Röhre im Einsatz, wollte vermeiden dass der Riemen durchhängt, bin dann auf HDT3 Riemen in 9mm gegangen.
Angehängte Dateien:
-

Laser_X_Drive.jpg
19 KB
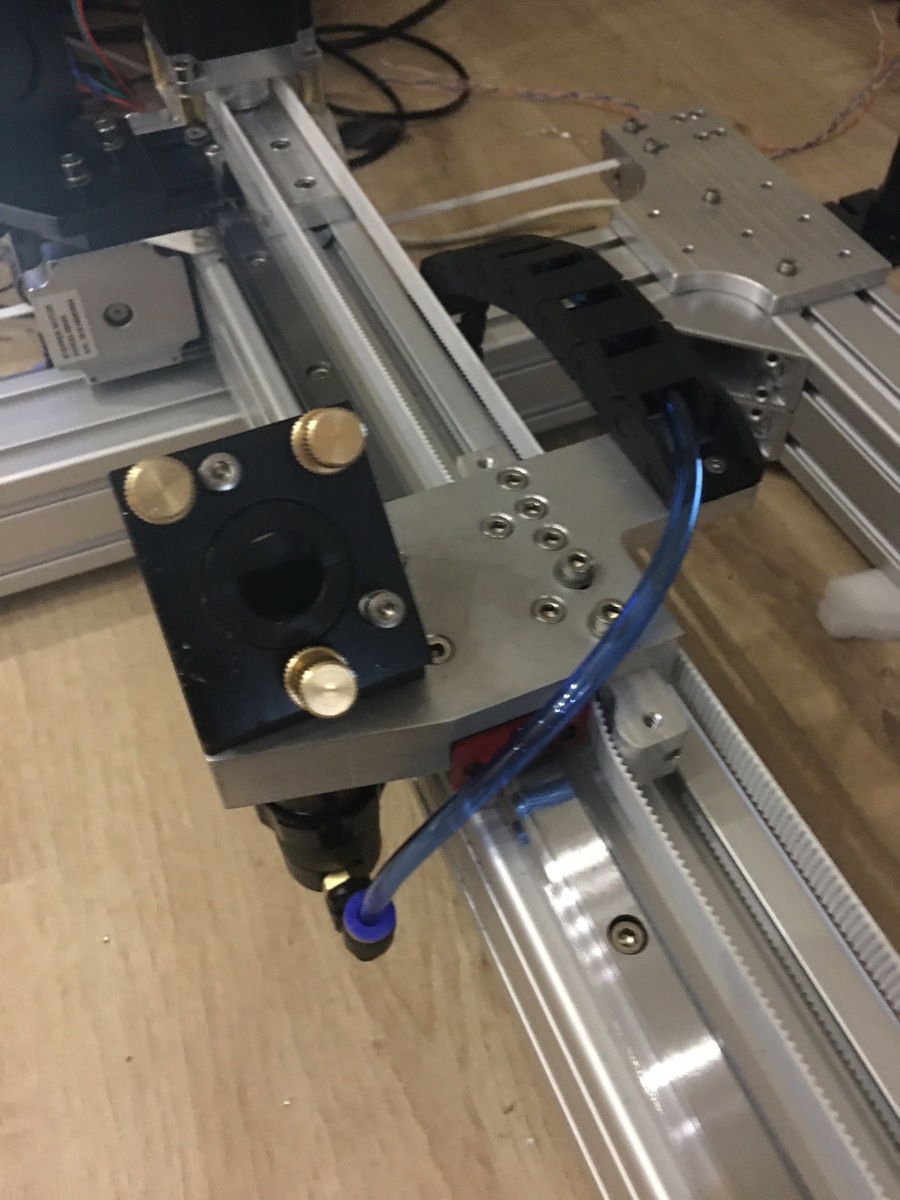
Weihnachtsmann schrieb: > Ich habe meinen Motor wie auf einem deiner Bilder angeordnet und arbeite > mit einem kleinen Riemen. Dem langen (gelben) habe ich direkt am > Schlitten angebracht habe, somit ist wenig "Hebel". Habe mir gerade nochmal den Bauraum angesehen, der Laserkopf ist ja ohnehin schon recht hoch, habe den Motor mal gedanklich auf den Kopf gestellt, dann ist in der Tat wenig "Hebel" wenn man so nah am Schlitten bleibt und die Höhe der Umhausung ändert sich trotzdem nur unwesentlich. Über den Umstand, dass ich die Anschlusskabel dann nicht mehr direkt vom Motor in das Profil einführen kann komme ich sicher weg ;-) Fräse das gleich mal testweise und gucke wie es sich ausgeht. Weihnachtsmann schrieb: > Kann ich heute Abend nachreichen. Das wäre sehr gut. Gruß Dominik
Hast du dir mal aus dem 3D-Drucker bereich die Riemenführung/Bauweise genannt "CoreXY" angeschaut? Damit hält man die Achse leicht, weil man den Schrittmotor nicht mit spazieren fahren muss. LG, Björn
Angehängte Dateien:
-

image.jpg
240 KB
Björn R. schrieb: > Hast du dir mal aus dem 3D-Drucker bereich die Riemenführung/Bauweise > genannt "CoreXY" angeschaut? Hi Björn, ja, habe ich bei dem großen Drucker im Einsatz. Ist nicht schlecht wenn man zwei schnelle Achsen braucht. Allerdings muss ich sagen, dass das verdrehen des Riemens auch bei größeren Spannweiten eher nicht so gut ist. Ich würde es nicht nochmal so machen, dann lieber ordentliche Linearführungen und H-Bot. Aber das ist meine pers. Meinung. Gruß Dominik
Dann danke ich für das Teilen deiner Erfahrungen. Ich habe es nämlich noch nicht in der Realität getestet, hatte es aber in die nähere Auswahl gezogen für einen Drucker-Selbstbau. LG, Björn
Wenn du die Riemen übereinander anordnest, sparst du dir das Verdrehen. Schau dir mal den HEVO an. Hab ich hier stehen, da ist nix verdreht. Bietet sich mit dem Laserkopf ja auch irgendwo an. Viel leichter bekommste den nicht hin.
Angehängte Dateien:
P. W. schrieb: > Wenn du die Riemen übereinander anordnest, sparst du dir das Verdrehen. > Schau dir mal den HEVO an. Hab ich hier stehen, da ist nix verdreht. > > Bietet sich mit dem Laserkopf ja auch irgendwo an. Viel leichter > bekommste den nicht hin. In der Tat, viel besser, vielleicht baue ich den Drucker so um, wenn ich alle anderen Projekte einigermaßen strack habe. Für den Laser bin ich jetzt mit den getrennten Achsen eigentlich schon zu weit. Denke auch hier ist das garnicht so schlecht, bei 60w rechne ich nicht mit so gewaltigen Schnittgeschwindigkeiten, sprich die y-Achse darf ruhig etwas Träger sein, aber fürs Rastern muss die x-Achse schon flitzen ;-) Gruß Dominik
Angehängte Dateien:
Habe heute mal ein paar Versuche mit der X-Achse gemacht. Einseitig angetrieben hat nicht so gut geklappt. (10mm gt2 pu/stahl) Mit je einem Motor an beiden Seiten läuft es bis 63m/min recht passabel. (Mehr kann die Ansteuerung auch nicht) Der Riemen und die Motoren werden natürlich noch ordentlich montiert. https://youtu.be/1-O51COkCD4 Frage an die Profis: welche Geschwindigkeit braucht man, beziehungsweise wie schnell macht Sinn beim Gravieren? 60w Hartholz z.B.? Gruß Dominik
Angehängte Dateien:
Mini-Update: Die Laufkatzen für die Y-Achse und die Motorbefestigungen X sind fertig und montiert. Fehlen noch zwei Stepper, aber sind im Zulauf. Dann kommt der Riemenspanner, den will ich auf den Schlitten setzen? Nach wie vor die Frage: Wie viel m/min sind beim Rastern sinnvoll (hier Holz, 60w)? (Schätze das die PWM hier die Grenze ist...) Generelle Frage an die Besitzer eines Co2 laser, welche software nehmt ihr zur Ansteuerung? Ich überlege gerade Grbl auf nen Atmega1284 zu portieren, damit ich das Vorspannen der x-Achse und Ausrichten der y-Achse unterbekomme oder gibt es da schon was? gruß Dominik
Dominik V. schrieb: > Nach wie vor die Frage: Wie viel m/min sind beim Rastern sinnvoll (hier > Holz, 60w)? (Schätze das die PWM hier die Grenze ist...) Ich kann nur von meinem K40 berichten. Da funktioniert maximal 15 m/min beim Rastern. Mit einer 40W Röhre und 20 % PWM ist das für Weichholz oft zu langsam, für Hartholz aber in Ordnung. Wenn die "langsame" Achse schon mit 63 m/min läuft würde ich mir da keine all zu großen Sorgen machen ;) Grüße, Daniel
Seid ihr sicher das schwere Metall zusammen mit den Motoren bewegen zu muessen ? Die Motore koennen doch auch fest sein... Eigentlich genuegt es doch die Spiegel zu bewegen, den Laser wuerd ich auch fest lassen. Solle eigentlich ueber Differentialriemen gehen. Allenfalls waere der Fokus anzupassen.
Daniel schrieb: > Da funktioniert maximal 15 m/min beim Rastern. Mit einer 40W Röhre und > 20 % PWM ist das für Weichholz oft zu langsam, für Hartholz aber in > Ordnung. Hallo Daniel, das ist ja schonmal ein Anhaltspunkt, werde die Achse dann wohl so fertig stellen und erstmal nicht weiter optimieren. Hab auch nochmal ins Handbuch vom Lasernetzteil gesehen, die Reaktionszeit zwischen Sollwertvorgabe und Output soll <=1ms betragen. Bei 63m/min sind es ja schon 1050mm/sec, damit wäre die garantierte Auflösung schon knapp über einen mm, was sicher für filigrane Arbeiten schon viel zu grob/schnell ist. Auch brauche ich dann eine deutlich schnellere Steuerung um die Daten überhaupt an den Laser senden zu können. Zur Not kann man ja immer noch die Spannung an den Endstufen erhöhen, wenn es dann doch noch etwas schneller gehen muss. Name H. schrieb: > Seid ihr sicher das schwere Metall zusammen mit den Motoren > bewegen zu muessen ? Die Motore koennen doch auch fest sein... > > Eigentlich genuegt es doch die Spiegel zu bewegen, den Laser wuerd ich > auch fest lassen. Im Prinzip werden hier auch nur die Spiegel bewegt, zugegebenermaßen ist die x-Achse recht massiv (wenn man bei Alu-Profilen von massiv sprechen kann). Für den Laser schien mir das passend, weil der Laserkopf selbst zwar sehr leicht ist, aber möglichst stark beschleunigt werden soll. Die entstehenden Kräfte müssen ja irgendwie abgefangen werden. Dass alle Motoren in Y-Richtung mitgeschleppt werden, hätte man sicher anders lösen können, aber ganz so viel Unterschied am Gewicht der Achse hätte das nicht ausgemacht und so sind zumindest die Zahnriemen möglichst kurz. gruß Dominik
Nach kurzer Pause mal ein kleines Statusupdate, habe die Eckverbinder und Riemenspanner für die Y-Achse fertig. Klar ist die Beschleunigung deutlich geringer, auch ist der Aufbau noch provisorisch. Hier der Speedtest Y bis 30m/min (22V auf dem linken, 24V auf dem rechten Antrieb): https://youtu.be/BaB435QwWOY (Und nein, Mach3 wird nicht zum Einsatz kommen, hatte ich nur gerade da zum testen) Morgen sollen die restlichen Nutensteine kommen, wenn alles ordentlich montiert und verkabelt ist teste ich weiter, denke da geht noch was. Denke aber auch mit der Geschwindigkeit ist Schneiden kein Problem. Für die hartgesottenen Späneliebhaber noch die Entstehung der Teile im Zeitraffer: Teil1: https://youtu.be/QLmXLRY-oKE Teil2: https://youtu.be/4FTjuRAhbr0 Gruß Dominik
Mal wegwerfen schrieb: > Cool. Weshalb trocken gefraest ? Fast, Minimalmengenschmierung. Nur bei den 1,2er Nuten für die Riemenspanner habe ich die MMS abgedreht und habe manuell Spiritus drauf gegeben. Grüße
Angehängte Dateien:
-

IMG_4920.JPG
230 KB -

IMG_4925.JPG
210 KB -

IMG_4924.JPG
210 KB -

IMG_4926.JPG
200 KB -

IMG_4921.JPG
230 KB
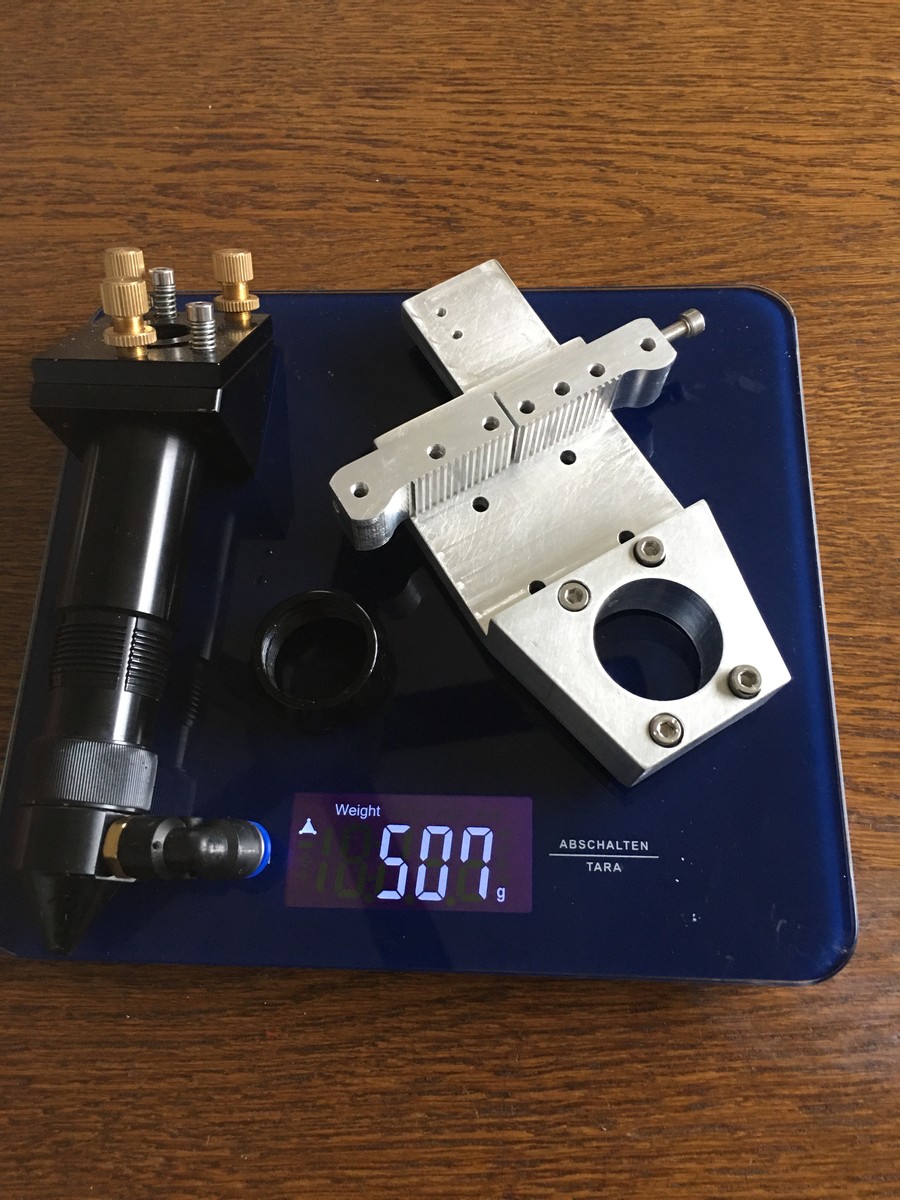

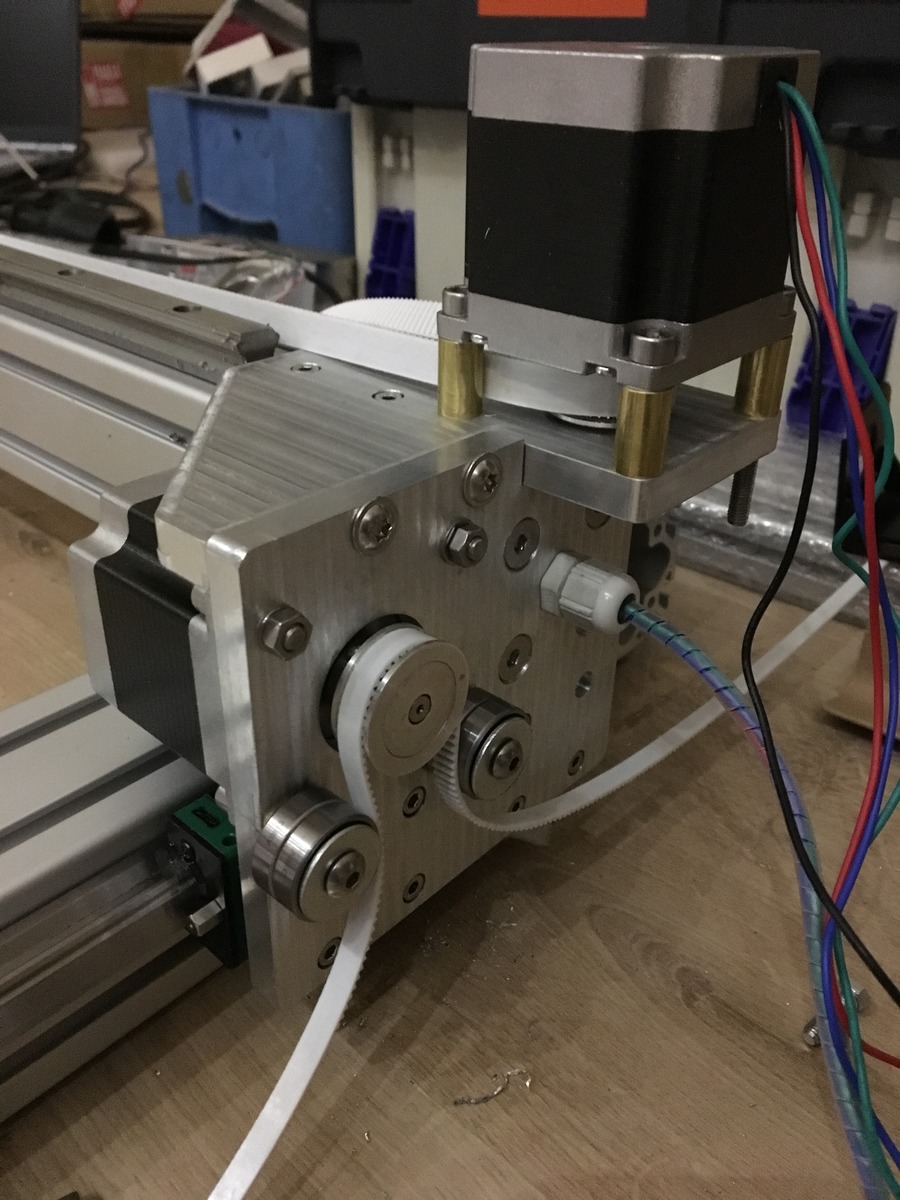
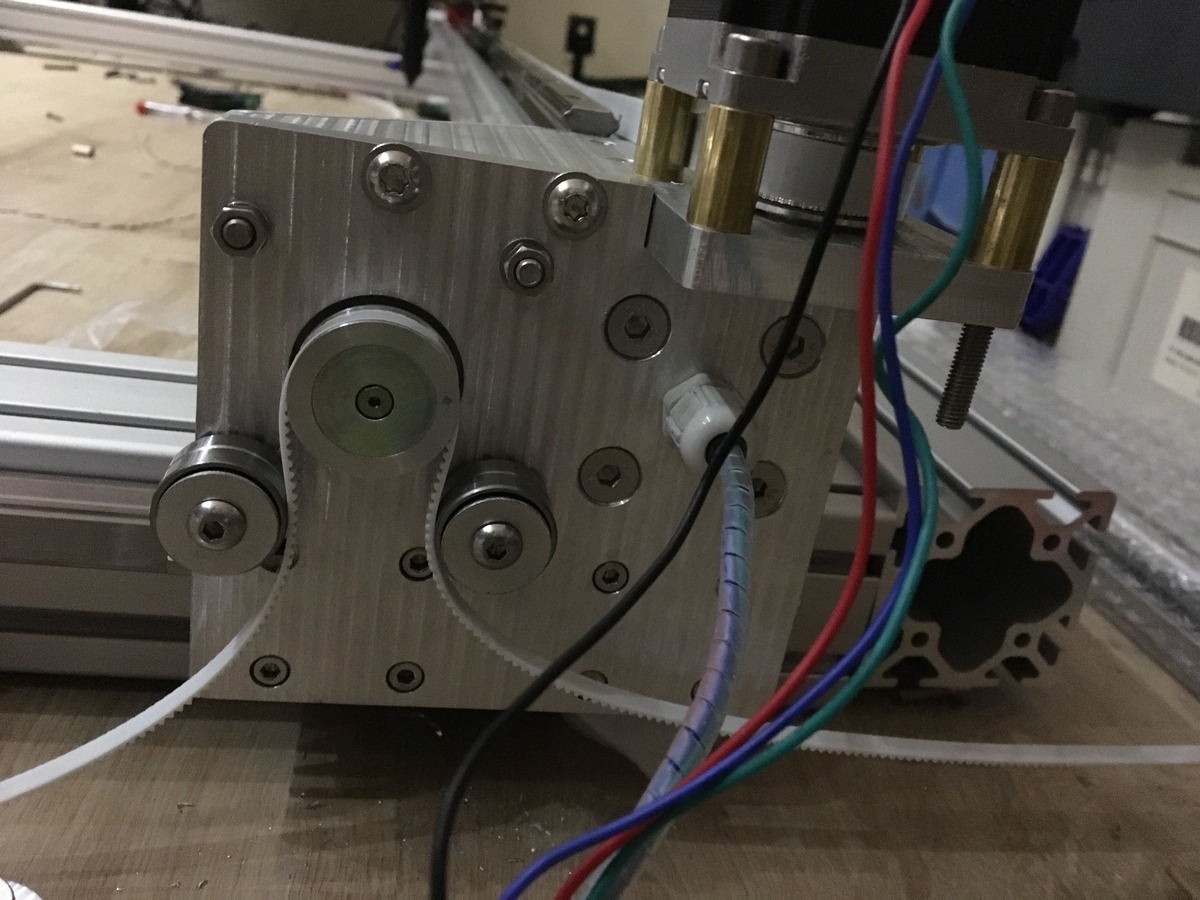
Hallo, die Ursprungsfrage ist damit beantwortet, die X-Achse ist soweit komplett :-) Mit dem "Pull-Pull-Prinzip" fahre ich glaube richtig, zeigt sich aber erst wenn die ersten Schnitte gemacht sind... Ich möchte mich an dieser Stelle noch für alle Tips bedanken. Gerne höre ich auch noch Empfehlungen für die passende Ansteuerung, diese braucht nicht unbedingt die Rektifizierung des Portals oder das Vorspannen des X-Riemens beherrschen, ich denke dass ich dies ohnehin auf einen separaten Controller auslagere und nach erfolgreichem Abschluss der Prozedur via Bus-Umschalter oder Logik-Gatter die Kontrolle an die Steuerung übergebe. Von daher reicht ein 3-oder 4-Achs System vollkommen aus. Gerne auch Stand-Alone. Ich habe, rein zu Testzwecken, mal die Mikroschrittauflösung halbiert, damit erreicht der Test-Controller (Mach3 USB Karte) knapp 128 m/min. Bei 24V sah das dann so aus: https://youtu.be/yhfHpYi-lhI (Hier wird die maximale Geschwindigkeit aber nur kurz erreicht) Bei 36V geht in Sachen Beschleunigung noch etwas mehr: https://youtu.be/1IDtg3dEz54 Erst hatte ich überlegt, da ohnehin 12V für die Röhrenkühlung zur Verfügung stehen, die Schaltnetzteile in Reihe zu schalten, ist aber vermutlich nicht erforderlich, hier noch die Bewegung in XY Richtung bei 30m/min: https://youtu.be/Tnb4p6zF-v0 Dann kann ich die 12V zur Kühlung weiterhin über den Schalteingang des Netzteils schalten und brauche keine Hochstromrelais verbauen. Danke und Gruß Dominik P.S.: Hier noch (für die Späneliebhaber) die Entstehungsgeschichte des Linearschlittens: https://youtu.be/OoU3sV9IJxs
Angehängte Dateien:
-

IMG_4921.JPG
230 KB
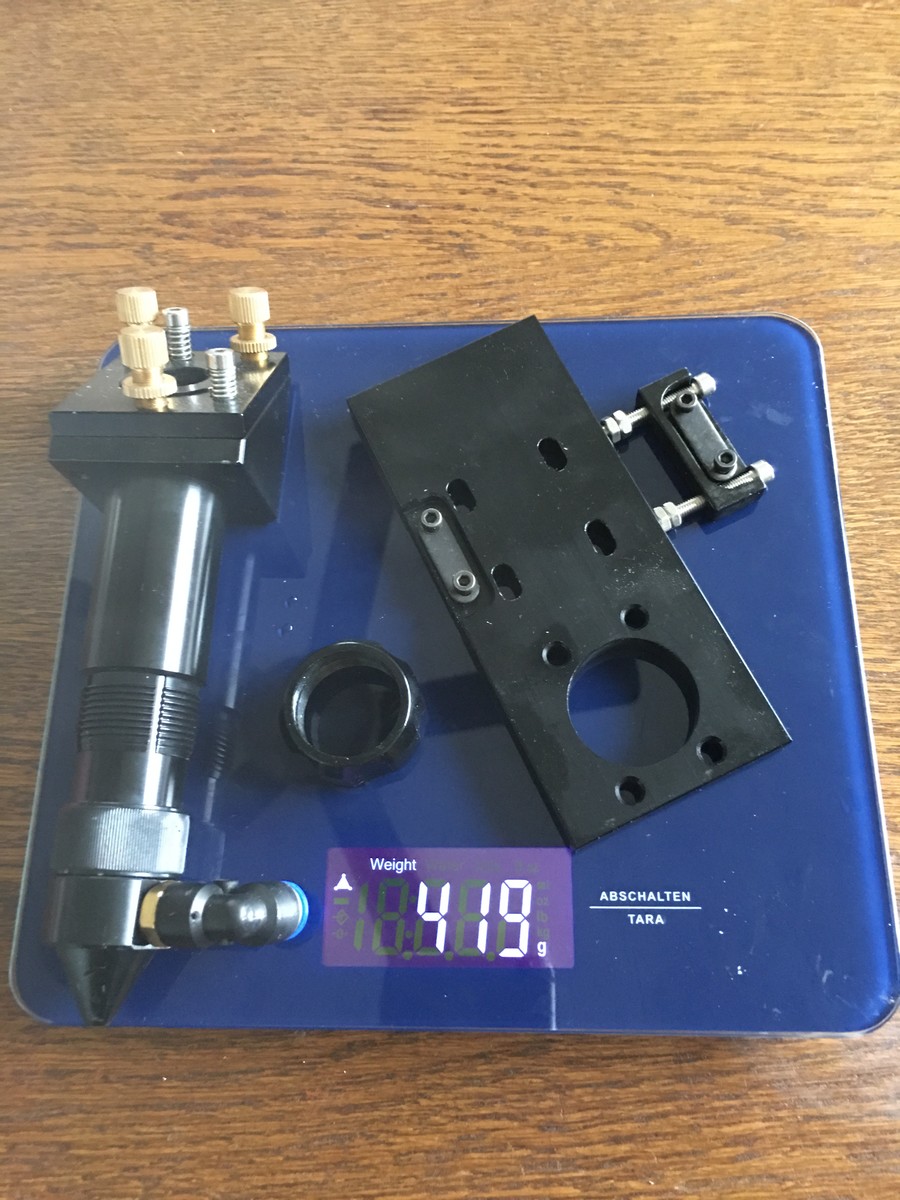
Die Gegenüberstellung zum Original-Schlitten hatte ich noch vergessen anzuhängen, sind also knapp 90g mehr zu beschleunigen. Wäre sicher möglich, das Material noch auszudünnen, aber ich denke das spa(r)ne ich mir...
Verwendest du einen T-Riemen? Die sind nicht besonders Spielfrei. Ansonsten denke doch mal über Servo Motoren nach, die wirken für dein Vorhaben ideal da du mehr Dynamik als Kraft in den Achsen brauchst.
A. B. schrieb: > Verwendest du einen T-Riemen? Die sind nicht besonders Spielfrei. Nein, in der Tat sind es günstige GT2 Riemen, allerdings PU mit Stahlzugstrang. 10mm auf der X-Achse und 2x6mm, je einer pro Seite auf der Y-Achse. A. B. schrieb: > Ansonsten denke doch mal über Servo Motoren nach, die wirken für dein > Vorhaben ideal da du mehr Dynamik als Kraft in den Achsen brauchst. Das wäre sicher eine bessere Variante, aber auch deutlich teurer. Selbst die billigsten Servos sind noch 3x so teuer wie die gewählten Stepper mit den dazugehörigen Endstufen. Ich hätte mir für das gesamte Projekt ca. 1000€/m2 Bearbeitungsflaeche vorgenommen, also jetzt ~900€ limit. Da die Steuerung noch fehlt wird das sicher jetzt schon knapp. Sollte es nachher nicht so laufen, wie gewünscht, bleibt mir natürlich noch der Umstieg auf Servos, gibt’s ja auch in Nema 23, aber dann überschreite ich die 1000€ auf jeden Fall. Gruß Dominik
Die JMC 180W Servos kosten 150€ und lassen sich mit Takt-Richtung ansteuern. Aber die Parametrierung is nicht so der Hit.
A. B. schrieb: > Die JMC 180W Servos kosten 150€ und lassen sich mit Takt-Richtung > ansteuern. Aber die Parametrierung is nicht so der Hit. Die hatte ich für ein anderes Projekt mal im Auge, konnte mich aber dann nicht so recht durchringen, bin nachher mit EM705 und 23HS2442 gut zurecht gekommen. Beim Laser kommen im Moment 4 DM556-Y zusammen mit 23HS22-2804S zum Einsatz. Kostenpunkt für alle vier <200€. Für die Drehachse nehme ich später irgendwas was gerade noch rumliegt. Gruß Dominik
Waren die (eigentlich viel zu wuchtigen) Linearführungen nicht auch teuer?
A. B. schrieb: > Waren die (eigentlich viel zu wuchtigen) Linearführungen nicht auch > teuer? Nein, die gibt’s gelegentlich für einen echt guten Kurs im Online Auktionshaus. Allerdings immer nur dieselbe Länge: 2x1500 mm mit 4 Wagen für zuletzt 116€. Sind Hiwin kompatible 15er. Eine habe ich mittig getrennt und zusätzlich einen weiteren Wagen besorgt. Damit waren die Abmessungen dann auch festgelegt. Kostenpunkt für die Linearfuehrungen also ca. 140€. Ist aber auch die Standardgröße für solche Laser, daher passt auch das Bohrbild des Original Schlitten zum Linearwagen. Mit Netzteil, Röhre, Steppern/Treibern und Aluprofilen liege ich knapp unter 700€. Das hätten vier “günstige” Servos ja schon fast alleine gekostet. Wasserkühlung und Radialluefter lagen noch in der Grabbelkiste. Die bisherigen Frästeile sind alle aus Aluminium-Resten entstanden, die ich für ganz kleines Geld zugekauft habe. Obwohl für das Gehäuse noch Reste an Stahlrohr im Keller schlummern wird es jetzt schon recht eng. Na ja, wäre auch ein Wunder wenn man bei sowas mit dem Budget mal eine Punktlandung hinlegt. Zumal die Steppertreiber mit 120€ ungeplant waren, hatte erst kleinere dm332 eingeplant weil die noch übrig waren. (Rechnet man den Inhalt der Grabbelkiste dazu ist das Budget natürlich schon überreizt) Ich denke ich starte mit einem noch rumliegenden Grbl board und klammere die Steuerung erstmal aus, da kann man ja später immer noch upgraden. Da bin ich übrigens immer noch an Tips für einen Kontroller interessiert. Gruß Dominik
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.