Hallo Zusammen, Ich habe ein Problem mit einem PMSM Motor, der über FOC geregelt wird. Der Motor dreht eigentlich sehr gut und ich kann den Iq und Id Strom gut regeln, jedoch ab einer gewissen Geschwindigkeit ist der Regler in eine Richtung besser als in die andere und ich sehe einfach nicht warum das so ist. Man sieht Störungen auf der Eingangsspannung und auch, dass der Id Strom nicht mehr sauber unterdrückt werden kann. Folgendes habe ich bereits herausgefunden: 1) Der elektrische Winkel ist sauber erfasst, der Motor dreht gleich schnell in beide Richtungen und wenn ich den Winkel um den gemessenen Offset verschiebe, wird die Performance schlechter. Der Encoder kann also nicht der Grund sein 2) Der Motor ist auch nicht schuld, wenn ich zwei Phasen drehe, dann funktioniert die andere Richtung besser. 3)Der Motor hat eine Induktivität von 60uH und einen Innenwiderstand von 0.12Ohm und wird bei 12V betrieben. Die PWM Frequenz ist 24kHz und der NoLoad Strom ist 1A. Daher müsste nach folgender Formel gelten:
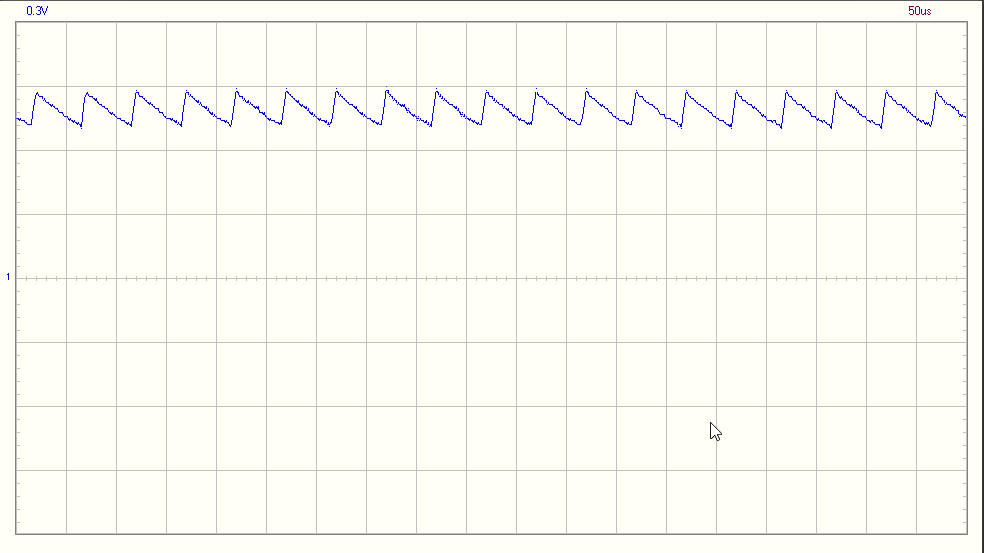
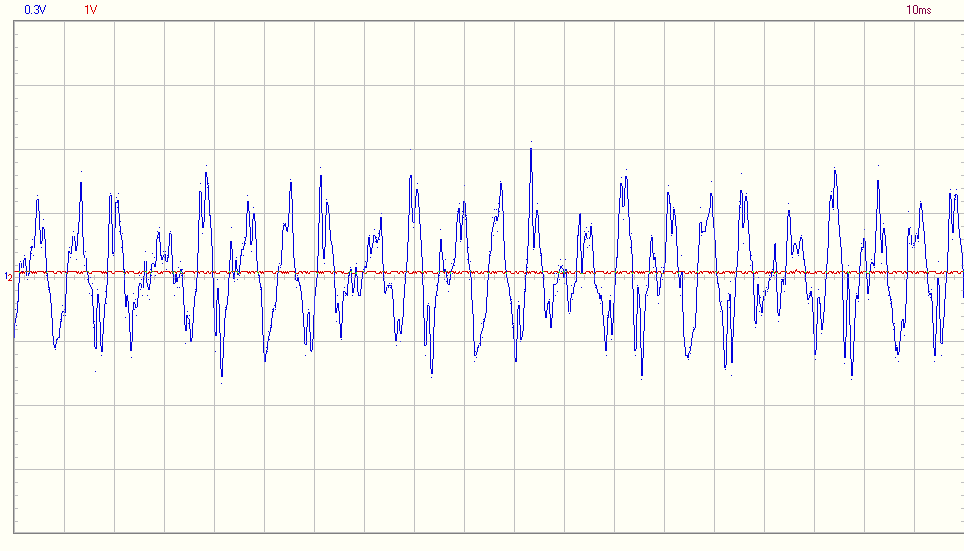
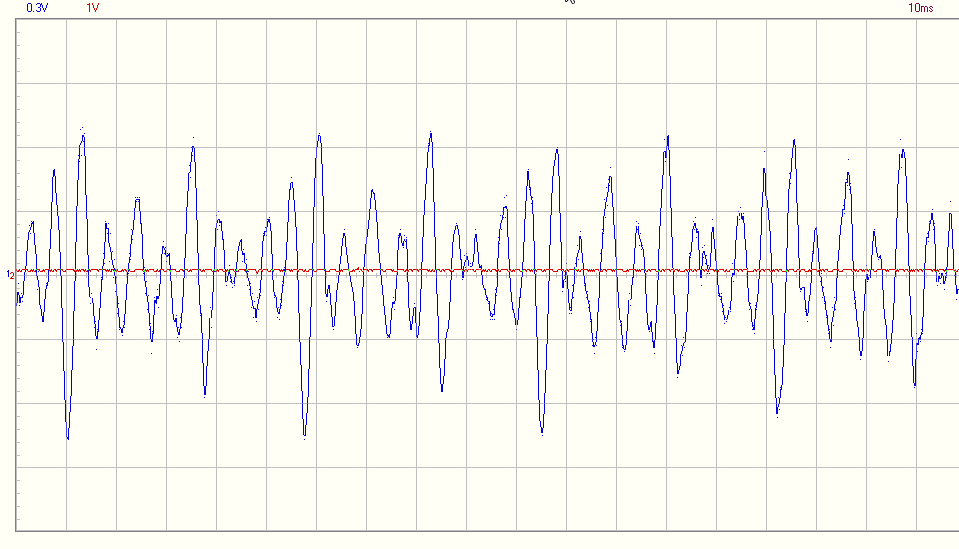
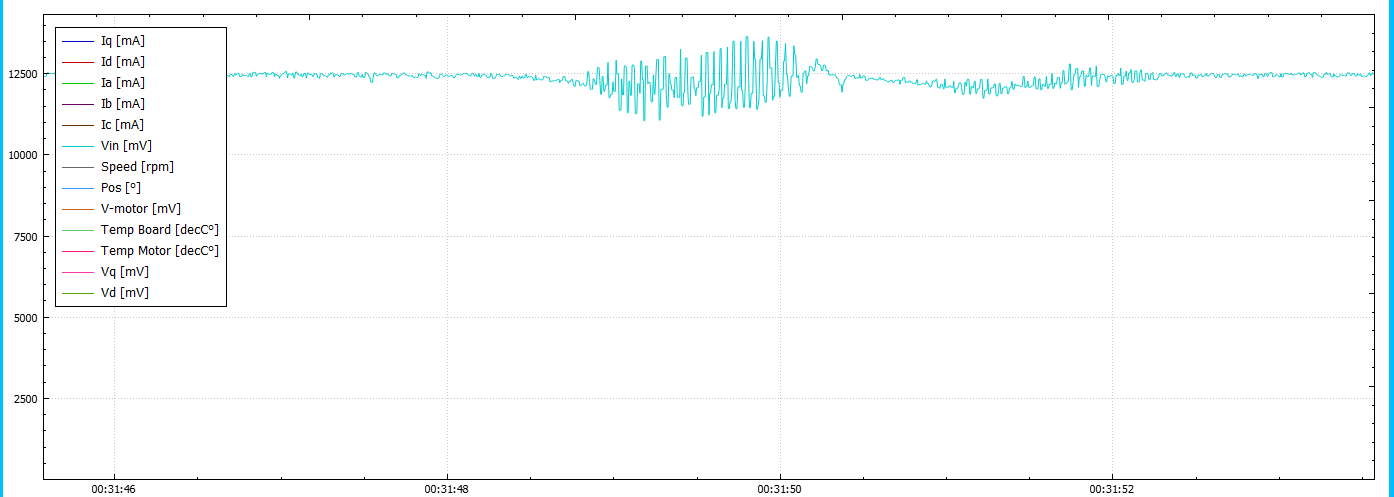
4) Die Strommessung erfolgt über einen INA240 Strommesssensor, daher kann die Strommessung eigentlich nicht falsch sein. Der Ausgang des Strommesssensors hat ein 1uF über einen 100Ohm Widerstand als Filter und es wird mit dem ADC mit 3Cycles bei 25MHz über 30 Messungen gefiltert 5) Wenn der Regler instabil würde aufgrund der zu geringen Induktivität, müsste das doch in beide Richtungen der Fall sein? Im Anhang habe ich mal noch die Strommessungen mit einer Strommesszange, 100mV/A an einer Motorphase. Die schlechte Richtungen zeigt deutlich Instabilität. Weiter sieht man den Strom bei der Positions-Regleung, der gut geregelt werden kann, jedoch der Ripple schon ziemlich groß. Hat jemand eine Idee, was man da noch probieren kann? Ich blicke nicht mehr durch, was noch das Problem sein könnte.