Moin, hat jemand Erfahrung mit der Rekuperationstechnik bei einem sensored BLDC? Mein selbstgebautes e-bike mit Gasgriff rekuperiert - aber nur wenn ich schneller Talwärts fahre als die höchste üblicherweise erreichbare Geschwindigkeit und dabei den Gasgriff voll aufdrehe. Um auch bei langsamem Bergabwärtsfahren zu rekuperieren, müsste man glaube ich, bei der richtigen Hallsensorposition die betreffende Wicklung des BLDC mit einem FET kurzschliessen, je nach gewünschtem Ladestrom im richtigen Moment wieder den FET öffnen. So quasi nach dem step-up Prinzip. Habe schon mit dem selbstgebastelten Controller einige Gate-Treiber und FET's verknallt bis der Controller zuverlässig funktionierte. Möchte nach Möglichkeit nicht wieder so viele Bauteile verheizen beim Experimentieren, wäre deshalb froh um einige Tipps. Freundliche Grüsse Jochen Paul
Jochen-paul S. schrieb: > Um auch bei langsamem Bergabwärtsfahren zu rekuperieren, müsste man > glaube ich, bei der richtigen Hallsensorposition die betreffende > Wicklung des BLDC Einfach negativen q-Strom einregeln, den Rest macht der Modulator-Algorithmus (flat bottom, flat top, SVM, ...) selbst. Die elektrische Position des Motors, nötig für die Park-und Park-Inverse Drehtransformation kann über einen einfachen Observer von den Hallsensoren abgeleitet werden.
Jochen-paul S. schrieb: > Mein selbstgebautes e-bike mit Gasgriff rekuperiert - aber nur > wenn ich schneller Talwärts fahre als die höchste üblicherweise > erreichbare Geschwindigkeit und dabei den Gasgriff voll aufdrehe. Ich bin einmal auf eine E-Messe mit einem solchen Gefährt probegefahren. Da konnte im Menue die Geschwindigkeitsgrenze eingestellt werden. Wenn man dort 15kmh einstellt, dann funktioniert es mit dem Hebel erst ab dieser Geschwindigkeit und kann auf die Schnelle nicht geändert werden und ging auch nicht niedriger einzustellen. Es war ein Pedelec. Dass es bremsen soll, erkennt das Bike daran, dass nicht getreten wird. Ansonsten konnte mit dem Gashebel die Unterstützungsstufe bequem hoch oder runtergeschaltet werden. Glaube es war von Greenmover oder so ähnlich.
Guter Punkt, Dieter, zur zweckmäßigen Bedienung. Die Bremswirkung sollte ähnlich wie die Unterstützung bei der Fahrt anpassbar sein. Jochen-paul, betreibst du deinen BLDC wirklich nur mit Block- oder mit Sinuskommutierung? Bei meinem letzten Post bin ich von Sinuskommutierung ausgegangen, dachte mir dann aber, dass du evtl. kein fein aufgelöstes Winkelsignal hast, weil du ja BLDC sagtest...
Angehängte Dateien:
-

WP_20200524_10_48_51_Smart.jpg
400 KB -

WP_20200524_10_47_33_Smart.jpg
350 KB
Dieter schrieb: > Ich bin einmal auf eine E-Messe mit einem solchen Gefährt probegefahren. > Da konnte im Menue die Geschwindigkeitsgrenze eingestellt werden. Wenn > man dort 15kmh einstellt, dann funktioniert es mit dem Hebel erst ab > dieser Geschwindigkeit und kann auf die Schnelle nicht geändert werden > und ging auch nicht niedriger einzustellen. Es war ein Pedelec. Dass es > bremsen soll, erkennt das Bike daran, dass nicht getreten wird. > Ansonsten konnte mit dem Gashebel die Unterstützungsstufe bequem hoch > oder runtergeschaltet werden. Glaube es war von Greenmover oder so > ähnlich. Danke für die Antwort. Ich weiss auch, dass z.B. der "Stromer" rekuperieren kann, beim Stromer ST1 kann man zwei Stromstärken zum rekuperieren einstellen. Nur möchte ich dies mit meinem selber hergestellten Controller realisieren. Im Moment betreibe ich mein e-bike mit einem selbstgebauten Controller, das Herz im Controller ist ein dsPIC30f4012, die Firmware von Microchip habe ich für meine Zwecke umgeschrieben. Meine ersten Versuche vor ein paar Jahren war die Steuerung eines umgebauten PKW-Alternators, mit nachträglich eingebauten IR-Sensoren. Für die Rekuperation mit diesem Controller fehlt mir das know how, deshalb suche ich hier nach technischem Rat.
Insider schrieb: > Jochen-paul, betreibst du deinen BLDC wirklich nur mit Block- oder mit > Sinuskommutierung? Bei meinem letzten Post bin ich von Sinuskommutierung > ausgegangen, dachte mir dann aber, dass du evtl. kein fein aufgelöstes > Winkelsignal hast, weil du ja BLDC sagtest... BLDC = brushless direct current. Oder auf deutsch: bürstenloser Gleichstrommotor, also nicht sinusodial gesteuert.
Es gab von einem Modellbauer eine Homepage, da waren die ganzen Verfahren gut beschrieben. Diese Beiträge wurden wegen laufender Angriffe entfernt. Angeblich wäre so viel falsch gewesen und nur abgeschrieben. Das stimmte aber nicht. Seit dem diese Seite weg ist, bin ich dazu übergegangen solche Seiten als pdf-Druck-Datei abzuspeichern (powercroco.de).
Jochen-paul S. schrieb: > BLDC = brushless direct current. Oder auf deutsch: bürstenloser > Gleichstrommotor, also nicht sinusodial gesteuert. Und warum sollte man den nicht Sinuskommutieren können? Dafür brauchst du nichtmal unbedingt einen Resolver o.ä. Es gibt massenhaft Sensorlosverfahren.
Jochen-paul S. schrieb: > hat jemand Erfahrung mit der Rekuperationstechnik bei einem sensored > BLDC? Nicht wirklich. Scheint mir aber auch nicht ganz so trivial zu sein. Wollte mir mal ein fertiges Bike kaufen und hatte den Biactron-Antrieb der Klever-Bikes favorisiert. Die haben den Antrieb recht gut hinbekommen. Bin dann aber davon abgekommen, weil kein Händler Ahnung von dem Antrieb hatte. Wenn da mal 'ne Störung ist, hat man die Arschkarte. Da ist es natürlich von Vorteil, wenn man Controller und Software selber entwickelt hat. Dann ist der Antrieb unkaputtbar. Ich drücke dir die Daumen, dass du es hinbekommst.
Angehängte Dateien:
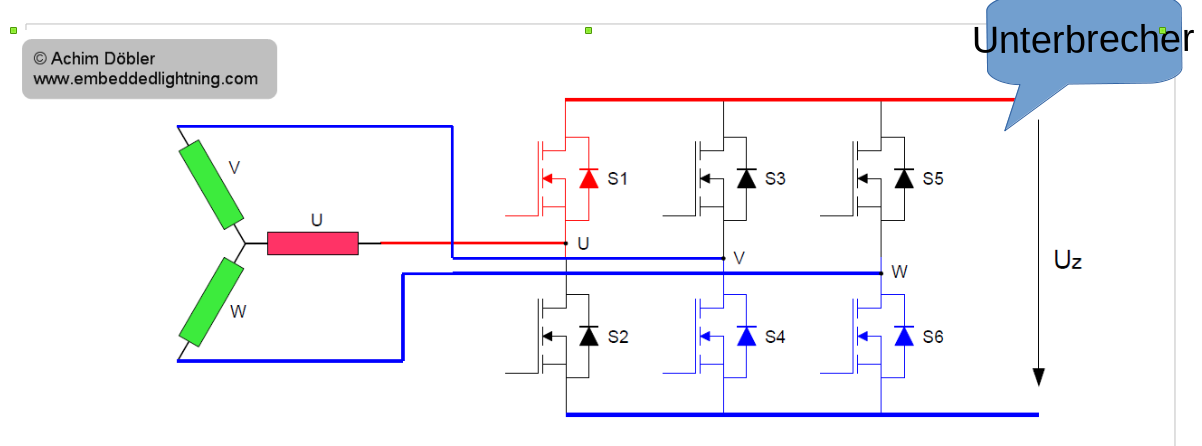
Die Primitivlösung wäre über einen Leistungsmosfet die H-Brücken von der Versorgung zu trennen (dort wo Unterbrecher steht), so dass die Bodydioden der Mosfets als Drehstromgleichrichter wirken. An der Versorgungsschiene kann der gleichgerichtete Strom mittels DCDC-Wandler auf die Akkuladespannung gehoben werden.
Vielen Dank für die Antworten. @Dieter: genau so ist mein BLDC aufgebaut, es geht eigentlich nur um den Zeitpunkt wann welche FET's und wie lange sie geschaltet werden, einen separaten DC-DC Konverter möchte ich nicht betreiben. Gruss Jochen-Paul
Genau bei dem Zustand/Zyklus von dem Bild würde für Antreiben/Fahren Mosfet S1 mit einer PWM beaufschlagt S4 und S6 sind dabei durchgehend eingeschaltet/leitend. Es gibt auch die Variante die Schaltverlust zu verteilen. In dem Falle wäre s1 durchgehend leitend und s4 & s6 würden identisch PWM beaufschlagt. Zum Bremsen würden s4 & s6 durchgehend leitend und s2 würde mit einer PWM beaufschlagt. In dem Falle arbeitet die Schaltung als Aufwärtswandler. Der Flyback fließt dann über die Bodydiode von s1 in die Versorgung zurück als Nutzbremsstrom. Es umgekehrt zu machen, wie beim Antrieb mit s2 durchgehend ein u. s4 & s6 mit PWM beaufschlagt, wäre auch denkbar. Für die anderen Zyklen, bis eine Umdrehung voll ist, musst Du das selbst fortsetzen.
Vergessen habe ich noch, dass Du Dir den Ausgangsspannungsverlauf der Hallsensoren darunter malst. Denke daran, dass der Hallsensor beeinflußt wird von dem Magnetfeld der Magnete und auch noch Rückwirkungen der Wicklungen diesen beeinflussen. Der Scheitelwert und Nullpunkt des Ausgangssignal verschiebt sich dadurch um ein paar Grad. Jochen-paul S. schrieb: > nicht wieder so viele Bauteile verheizen Dann spendiere den mosfets s2,s4,s6 einen Meßshunt oder auch eine Hallsensor zur Strommessung. Wenn der Strom zu groß wird, wird der Ein-Zustand des PWM-Signals vorzeitig beendet.
Dieter schrieb: > Dann spendiere den mosfets s2,s4,s6 einen Meßshunt oder auch eine > Hallsensor zur Strommessung. Wenn der Strom zu groß wird, wird der > Ein-Zustand des PWM-Signals vorzeitig beendet. Wer steuert denn einen Motor an ohne die Phasenströme zu messen...?
Gibt genügend, die messen nur den Gesamtstrom, der zu den drei Halbbrücken geht. Bei sensorless BLDC Motoren geht das natürlich nicht. http://de.ecrimpower.com/resources/better-know-a-bldc-sensorless-brushless-dc-motor-c.html
Dieter schrieb: > Gibt genügend, die messen nur den Gesamtstrom, der zu den drei > Halbbrücken geht. > > Bei sensorless BLDC Motoren geht das natürlich nicht. > http://de.ecrimpower.com/resources/better-know-a-bldc-sensorless-brushless-dc-motor-c.html Vielen Dank, werde mir das in Ruhe durch den Kopf gehen lassen. Gruss Jochen-Paul
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.