Hallo,
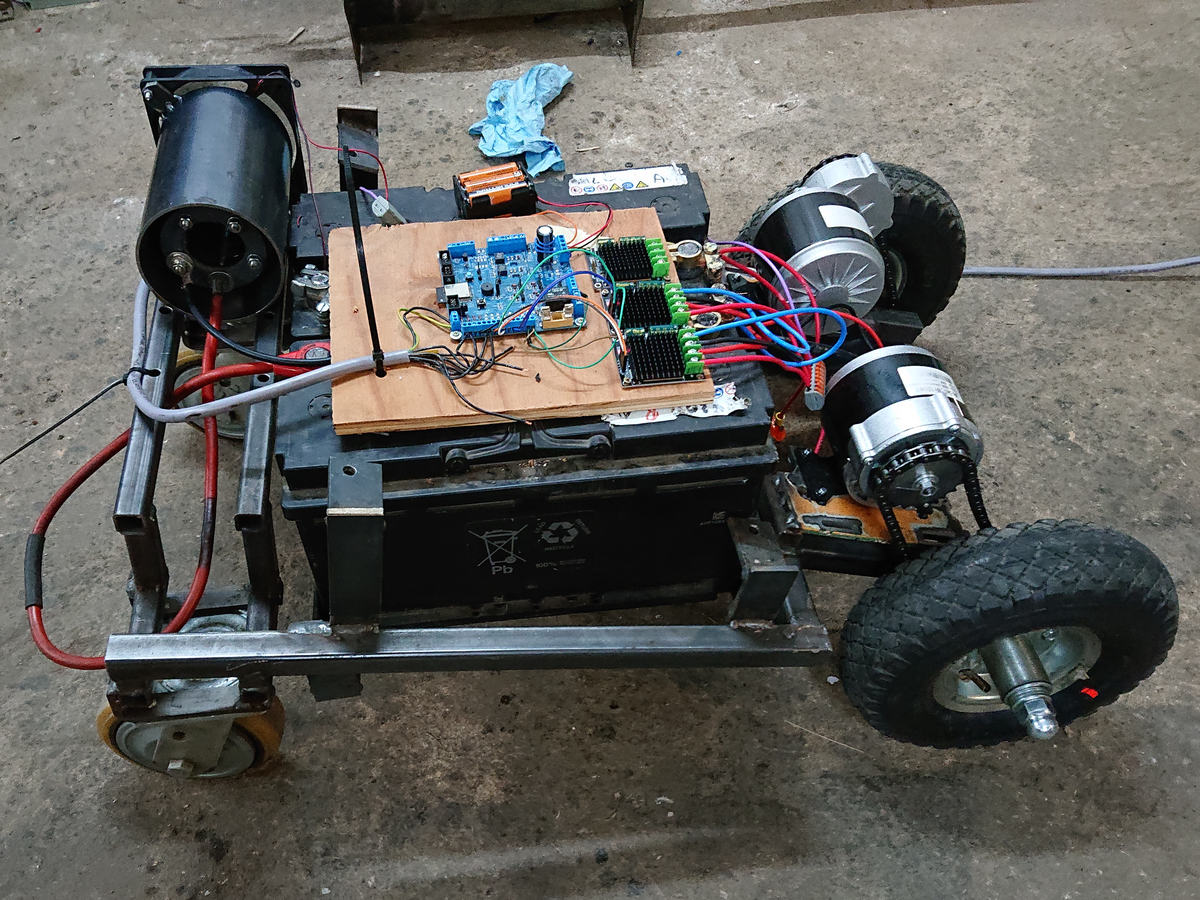
derzeit bastle ich an einem kleinen fahrbaren Untergestell, auf welches
z. B. ein Sitz montiert werden kann (siehe Photo Fahrzeug).
Leider scheitert es an der Ansteuerung der Motoren.
Um den Aufwand zu minimieren, habe ich mich dazu entschieden fertige
H-Brücken Module aus China zu verwenden. Diese steuere ich aktuell mit
10kHz PWM Signalen, welche von einem ESP32 Controller generiert werden,
an.
Die Treiber funktionierten zwar im Versuchsaufbau mit kleineren Motoren
und Labornetzteil einwandfrei, aber beim Setup am eigentlichen Fahrzeug
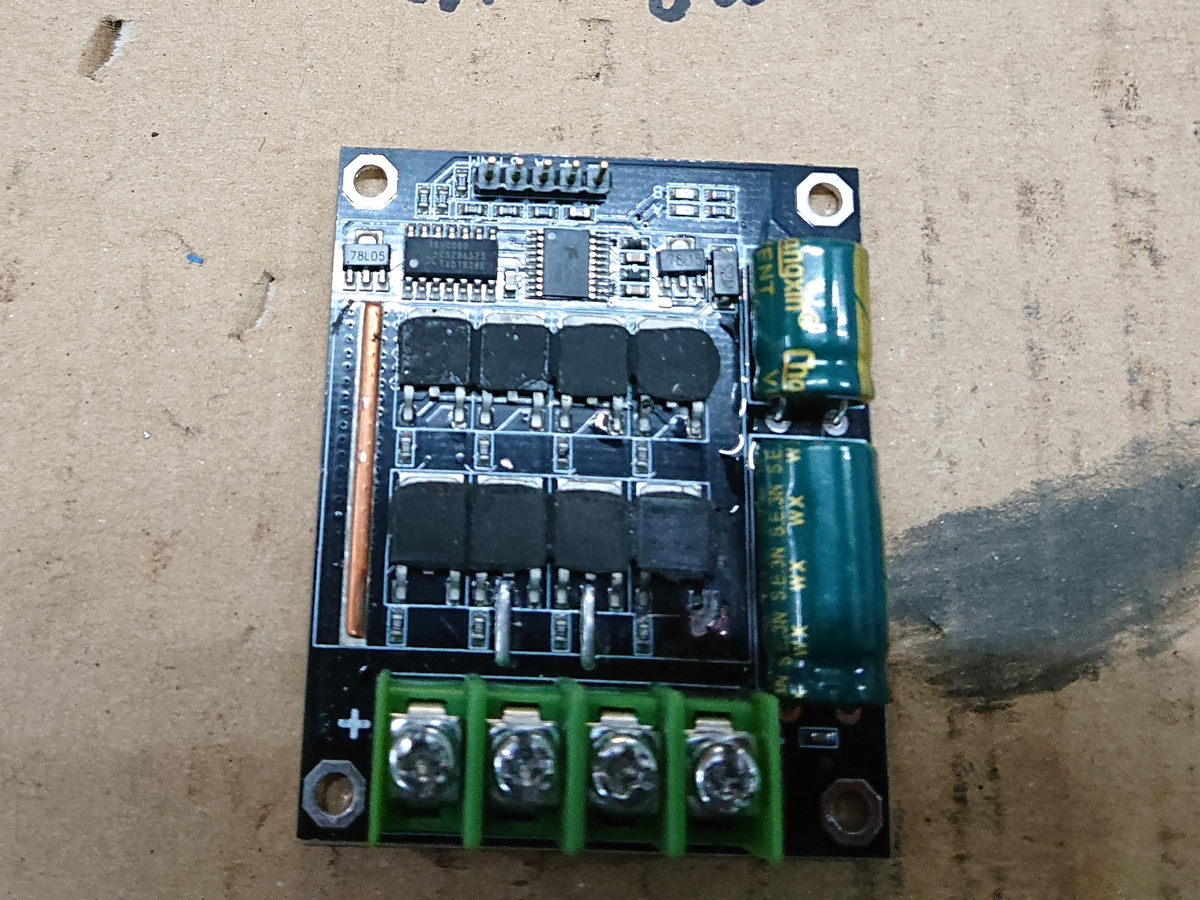
hatte ich weniger Erfolg. Die Module sind immer nach wenigen
Sekunden/Anläufen, beim Starten der Motoren ohne Last, durchgebrannt
(siehe Photo H-Bruecke).
Ich habe bereits mehrere verschiedene Treiber probiert, bei 100A
Maximalstrom dachte ich mir, diese wären völlig ausreichend für die 350W
Motoren bei 24V:
1
Double BTS7960 43A Motor Treiber H-Brücke H-Bridge
100A DC motor drive Module High Power motor speed Control Dual Channel H-bridge
5
https://www.aliexpress.com/item/32707889213.html
6
7
PWM DC Motor Driver Module 9V-30V 100A Single Way High Power H Bridge Drive
8
https://www.aliexpress.com/item/33035141653.html
Verwendete Komponenten:
-Batterie: 2x 12V 1000A 100Ah AGM-Starterbatterie
-Motoren: 2x 350W DC 24V Bürstenmotor mit Getriebe (Suchbegriff: "Motor
fuer E-Scooter")
Mit Multimeter und Zangenamperemeter habe ich folgende Messungen mit
einem Motor an den Batterien gemacht:
1
Motorbetrieb Strom Batteriespannung
2
Aus 0A 25,4V
3
Leerlauf 6A 24,3V
4
Hohe Last 60A 21,5V
5
Blockiert 130A 20,8V
6
(Einschalten 70A)
7
8
Gemessener Widerstand Motor: ~0,2 Ohm
Ich bin mir sicher, dass die "zu starken" Batterien das Problem
verursachen, diese also zu viel Strom zur Verfügung stellen. Für die
H-Brücken reicht wohl ein Überschreiten der 100A im
Millisekundenbereich, um diese zu zerstören.
Außerdem überrascht mich, dass diese 350W Motoren tatsächlich so viel
mehr Leistung aufnehmen können (2700W?! - siehe Messungen).
Andere, die solche Treiber verwenden, haben scheinbar keine Probleme mit
zu hohen Strömen, da vermutlich deren Spannungsquellen den Maximalstrom
einfach ohnehin begrenzen.
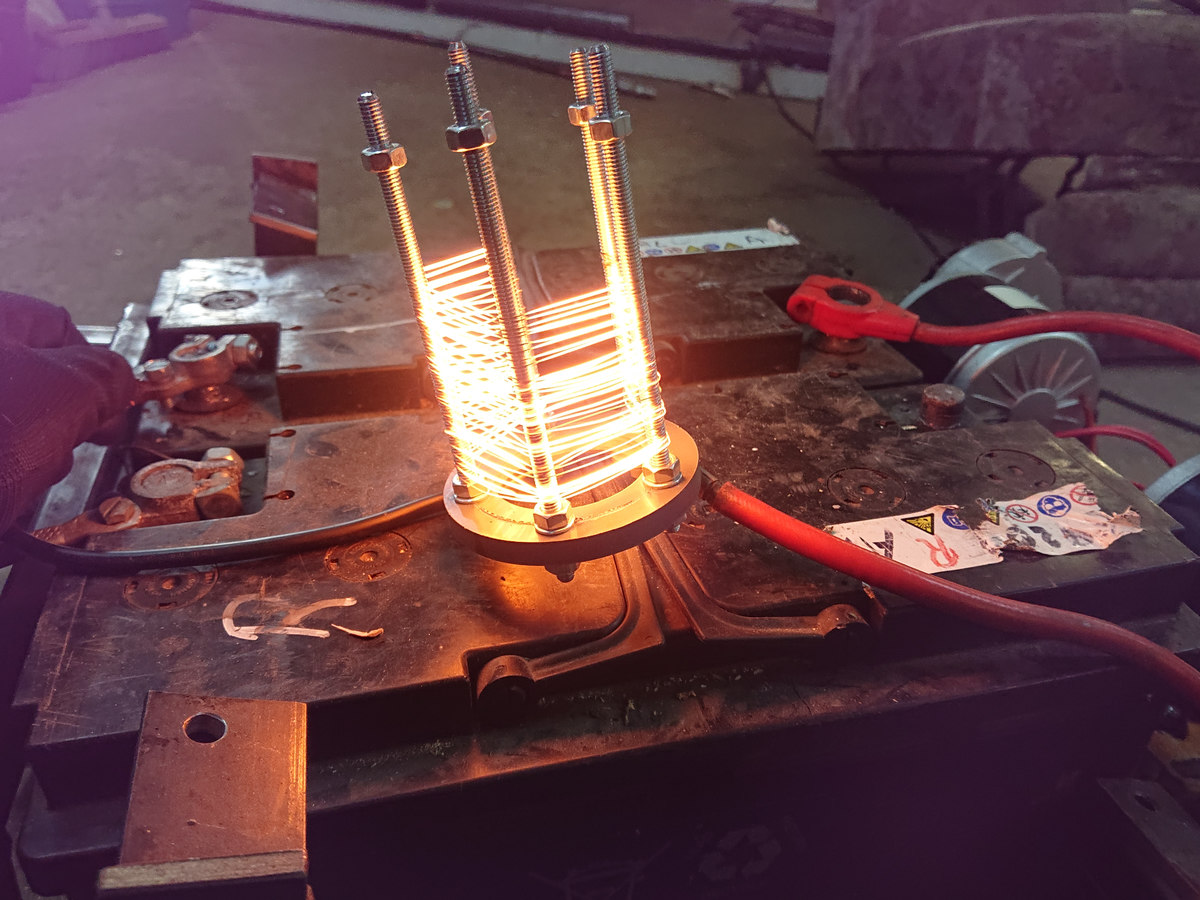
Als Versuch habe ich mir jetzt eine Art Leistungswiderstand aus
Widerstandsdraht gebaut (siehe Photo Widerstandsbaugruppe). Dieser ca.
0,25 Ohm Widerstand ist in Reihe mit den Batterien geschaltet und soll
den maximal möglichen Stromfluss testweise auf 90A begrenzen.
Damit funktioniert es zumindest zuverlässig sowie beim Anlauf als auch
unter Vollast.
Aber es ist wohl nicht Sinn der Sache bis zu 1000W der wertvollen, in
der Batterie gespeicherten, Energie zu verheizen (siehe Photos Tests).
Wobei die Verlustleistung eben quadratisch zum Laststrom ansteigt...
Deshalb suche ich gerade nach einer Möglichkeit den Maximalstrom der
Batterie oder die von den Motoren aufgenommene Stromstärke mit möglichst
wenig Aufwand auf max. 100A zu begrenzen.
Meine bisherigen Ansätze wären:
1. Tatsächlich einen Serienwiderstand verwenden und den Widerstandswert
auf ein Minimum optimieren/anpassen. Zusätzlich diesen dann mit dem
sowieso vorhandenen Controller bei bestimmten "hochstromfreien"
Konditionen mittels Relais oder IGBT überbrücken (z. B. Motorzustand,
PWM-Duty, oder evtl auch Verwendung von Drehzahl und Stromsensoren).
2. Andere Batterie mit geringerem Nenn- / Entladestrom besorgen und
verwenden.
Vielleicht fällt jemanden eine einfachere oder sauberere Lösung ein :)
Jonny S. schrieb:> bei 100A Maximalstrom dachte ich mir, diese wären völlig ausreichend für> die 350W Motoren bei 24V:
Nö.
Jonny S. schrieb:> Blockiert 130A 20,8V
Besorge dir andere Motortreiber, solche die bei Überstrom (schickerweise
sogar einstellbar) den PWM Impuls sofort abschalten bis der Strom wieder
gesunken ist.
Wundere dich nicht, warum die als robust und zuverlässig bekannten
Curtis Motortreiber teurer und aufwändiger sind als deine Platinen.
Hallo Jonny
Ich würde einmal das Über / Untersetzungsverhältnis der Motoren
nachrechnen,
Dabei stellt sich die Frage welche Endgeschwindigkeit planst du damit
?!?.
Ich würde die Motoren abhängig der geplanten Geschwindigkeit soweit wie
möglich untersetzen.
Die nächste Frage die sich stellt ist wie sieht deine Software aus ?
Ich würde entsprechende Anlauframpen bei der Ansteuerung vorsehen um dem
Motor die Möglichkeit zu geben die Massenträgheit zu überwinden.
Wenn du den Motor bei der gegeben Untersetzung ( Beurteilung anhand der
Bilder ) sofort zu 100% zuschaltest , kann das nur schief gehen.
Einen derartigen Serienwiderstand vorzusehen sehe ich nicht als den
richtigen weg an , das ist nur unnötiges verbraten von Energie.
Was ich dir im Nachgang noch empfehlen, wenn das alles Funktioniert, ist
eine
entsprechend dimensionierte Sicherung und einen Batteriehauptschalter
vorzusehen um keine bösen Überraschungen zu überleben.
Grüße,.
MaWin schrieb:> Besorge dir andere Motortreiber, solche die bei Überstrom (schickerweise> sogar einstellbar) den PWM Impuls sofort abschalten bis der Strom wieder> gesunken ist.
Danke für die Erklärung, es wäre wohl echt das Sinnvollste solche
"intelligenten" Treiber zu verwenden.
Leider sind mir diese professionellen Motortreiber etwas zu teuer/schade
für dieses Spaßprojekt. Bin eher auf der Suche nach einer
kostengünstigeren, wenn auch "Pfusch-Lösung".
Ansonsten würde ich mir einfach eine simple H-Brücke aus Relais bauen
(wie bei den ersten Tests mit vier 24V Schütze). Zwar nicht so elegant,
würde aber bei diesem Projekt und vor allem den wenigen Betriebsminuten
ausreichen :)
Schleby N. schrieb:> Ich würde einmal das Über / Untersetzungsverhältnis der Motoren> nachrechnen,> Dabei stellt sich die Frage welche Endgeschwindigkeit planst du damit> ?
Die Übersetzung habe ich sogar anhand der gewünschten Endgeschwindigkeit
berechnet :)
Ja, das Bild täuscht etwas - Die Getriebe am Motor haben bereits ein
Übersetzungsverhältnis von 1:9,78. Das, in Kombination mit den kleinen
Reifen, ergibt aktuell eine Geschwindigkeit von ~8,5km/h bei 2500U/min
Motordrehzahl.
Ich plane gerade tatsächlich die Übersetzung noch weiter zu reduzieren,
habe also schon Kettenräder bestellt um auf eine Geschwindigkeit von 6
oder sogar 3 km/h zu gehen.
Das mit den Rampen ist eine gute Idee, muss ich auf jeden fall
implementieren!
Habe ich bisher immer versucht manuell mit den Potis zu realisieren^^
Das Komische ist aber, dass die Treiber unabhängig von der Last (keine
Kette montiert) bereits durchgebrannt sind :(
10 kHz ist für diesen Motor maßlos übertrieben. Gehe mal auf 200Hz
runter, dann hast du auch viel weniger Schaltverluste in den
Transistoren.
Jonny S. schrieb:> Außerdem überrascht mich, dass diese 350W Motoren tatsächlich so viel> mehr Leistung aufnehmen können (2700W?! - siehe Messungen).
Beim Anlaufen nehmen Elektromotoren typischerweise 5x bis 10x den
Nennstrom auf. Diesen Strom muss der Motorcontroller einige Sekunden
lang aushalten.
Mein ganz gewöhnliches 3 kg Modellauto hat einen Motorcontroller, der
70A verträgt. Die mittlere Stromaufnahme des Motors ist aber nur ca. 5A
(bei 7,4V). Viel mehr würde der Motor auch nicht lange vertragen, wegen
der Wärme.
Hallo Jonny
Ganz Blöde Frage , bitte nicht krumm nehmen , laufen die beiden Motoren
auch mit jeweils entgegen gesetzter Drehrichtung , da sie ja auch nicht
in gleicher Richtung montiert sind.
Sollte dies nicht der Fall sein würde das die extreme Stromaufnahme
ebenfalls erklären , da sie dann gegeneinander arbeiten.
Witzig, ich bau grad ein sehr ähnliches Gefährt mit den gleichen Motoren
und den gleichen Reifen.
Hart einschalten ist bei sowas schlecht. Eine Spannungsquelle mit
praktisch unlimitiertem Strom auch.
Benutz Beschleunigungsrampen und bau einen Sicherungsautomaten 16A an
jeden Motor.
Bis die Software stabil läuft würde ich den Strom per Serienwiderstand
auf 30A begrenzen. (~0.5 Ohm)
Die Motoren sind auf max. 22A ausgelegt, viel mehr solltest du ihnen
auch nicht zumuten, sonst hast du ganz schnell einen Motor gehabt.
Durch das Gehäuse durch siehst du nicht, wenn da drin irgendwas zu
rauchen und glühen anfängt.
Wenn du in der Anwendung nicht sicherstellen kannst, dass die Motoren
nicht zu stark belastet werden, musst du den Strom eben messen und die
PWM gegebenenfalls verringern.
ACS712 in der 30A Version wären passend.
Stefan ⛄ F. schrieb:> 10 kHz ist für diesen Motor maßlos übertrieben. Gehe mal auf 200Hz> runter, dann hast du auch viel weniger Schaltverluste in den> Transistoren.
Das würde ekelhaften Lärm verursachen.
Ja, ich hab das mit genau diesen Motoren ausprobiert.
Stefan ⛄ F. schrieb:> 10 kHz ist für diesen Motor maßlos übertrieben. Gehe mal auf 200Hz> runter
Beim zweiten ausprobierten Treiber (siehe Link erster Post), gab es
keine Möglichkeit einen Freilauf zu realisieren. Also in den aus-Zeiten
der PWM hat der Motor immer gebremst, was ein sehr unangenehmes Geräusch
verursacht hat. Deswegen bin ich mit der Frequenz einfach mal deutlich
höher gegangen.
Werde den Tipp aber umsetzen und wieder deutlich reduzieren. Leider bin
ich ja noch nicht viel zum Testen gekommen...
Die aktuellen Treiber (letzter Link) bieten auch wieder einen Freilauf
(kein Zwangsbremsen im Ruhezustand).
Schleby N. schrieb:> laufen die beiden Motoren> auch mit jeweils entgegen gesetzter Drehrichtung , da sie ja auch nicht> in gleicher Richtung montiert sind.
Ja das habe ich berücksichtigt. Im Normalfall drehen beide Motoren also
entgegen gesetzt und man fährt geradeaus. Zum Wenden nutze ich den von
dir beschriebenen Fall um auf der Stelle im Kreis zu fahren :)
Der hohe Anlaufstrom (welcher die Treiber zerstörte) ist eben auch beim
Starten ohne Last am Motor aufgetreten.
wer schrieb:> Witzig, ich bau grad ein sehr ähnliches Gefährt mit den gleichen Motoren> und den gleichen Reifen.
Haha, was fuer ein Zufall - das ist ja interessant! Danke schon mal für
die Tipps, evtl. kannst du mir noch etwas weiterhelfen :)
Wie steuerst du die Motoren an? (Hardware, PWM Frequenz...)
Welche Spannungsquelle nutzt du? (Maximalstrom)
wer schrieb:> Benutz Beschleunigungsrampen und bau einen Sicherungsautomaten 16A an> jeden Motor
Meinst du, ich kann die Stromspitzen mit solchen Rampen dauerhaft in den
Griff bekommen, ohne weitere Treiber zu zerstören?
wer schrieb:> Bis die Software stabil läuft würde ich den Strom per Serienwiderstand> auf 30A begrenzen. (~0.5 Ohm)
Ja so mache ich es derzeit, aber eher um die Treiber nicht
aufzuarbeiten.
Den Motoren mute ich ehrlich gesagt etwas mehr zu (siehe Messungen), man
sollte es mit der Überlastungsdauer eben nicht übertreiben :P
Den Strom zu überwachen halte ich für sinnvoll, habe vor ein paar Tagen
bereits fertige Module mit diesem IC auf Aliexpress bestellt^^
Jonny S. schrieb:> Wie steuerst du die Motoren an? (Hardware, PWM Frequenz...)
Mit H-Brücken auf auf Basis von BTS7969. Man kriegt die als fertiges
Modul auf eBay, allerdings ist die Kühlung da so schlecht, dass man
nicht mehr als 5A damit erzielen kann.
Also ICs entnommen und auf eine eigene Platine gesetzt.
PWM-Frequenz sind bei mir 20kHz.
Controller eine Arduino Mega.
Jonny S. schrieb:> Meinst du, ich kann die Stromspitzen mit solchen Rampen dauerhaft in den> Griff bekommen, ohne weitere Treiber zu zerstören?
Ja, denn die Rampen verhindern dass der Strom schlagartig ansteigt. Das
gibt dem Microcontroller die Zeit den Strom zu messen und gegebenenfalls
wieder PWM zu verringern.
Jonny S. schrieb:> Welche Spannungsquelle nutzt du? (Maximalstrom)
40Ah 6S Lipo. Also auch einen Akku, der mit Freude etliche kA liefern
könnte. Bei 100A würde das BMS abschalten, ist aber noch nicht passiert,
da eben lange vorher abgeregelt wird.
wer schrieb:> Das würde ekelhaften Lärm verursachen.> Ja, ich hab das mit genau diesen Motoren ausprobiert.
Dann probiere andere niedrige Frequenzen. Ziel sollte sein, die PWM
Frequenz so niedrig wie möglich anzusetzen, um die Schaltverluste zu
reduzieren.
Stefan ⛄ F. schrieb:> Dann probiere andere niedrige Frequenzen.
Mein Hörbereich hat zum Glück keine Lücken (?). Daher kommen nur
Frequenzen über der Hörgrenze infrage, wenn ich nicht will, dass mir
beim Betrieb die Ohren abfallen. Alles darunter (10Hz...15kHz) sorgt für
unterschiedliche Arten von Lärm.
Aus Rücksicht vor Kindern die evtl. auch noch etwas höhere Töne hören
als ich wähle ich daher 20 kHz.
Stefan ⛄ F. schrieb:> Ziel sollte sein, die PWM> Frequenz so niedrig wie möglich anzusetzen, um die Schaltverluste zu> reduzieren.
Richtig. Daher auch 20kHz und nicht 200kHz oder 2MHz.
Positiver Nebeneffekt: Das Signal der Motorstrommessung lässt sich bei
20kHz PWM viel besser (also mit höherer Grenzfrequenz) filtern als bei
niedrigen Frequenzen, was eine schnelle Regelung erlaubt.
> Also in den aus-Zeiten der PWM hat der Motor immer gebremst, was> ein sehr unangenehmes Geräusch verursacht hat.
Dann hast Du den Sinn einer PWM nicht verstanden. Der Motor hat eine
Induktivität, wenn die Brücke einschaltet, steigt der Strom, wenn sie
ausschaltet, sinkt er. Da bremst zunächst nichts. Erst wenn der Strom
rückwärts fließt.
Wie immer die selben Tipps: alle Leitungen so kurz wie es geht, keine
Riesen-Schleifen wie bei Dir links. Leitungspaare mit dem selben Strom
(z.B. die zum Motor) verdrillen.
Abblock-C direkt an die Versorgungs-Klemmen der Treiber.
Ich denke, die Platinen sind weniger wegen Strom, sondern wegen
Überspannung durch Induktion in den Leitungen gestorben.
Man implementiert eine Spannungs- und Stromregelung.
Motorspannung ist proportional zur Drehzahl.
Motorstrom ist proportional zum Drehmoment.
Jonny S. schrieb:> Verwendete Komponenten:> -Batterie: 2x 12V 1000A 100Ah AGM-Starterbatterie> -Motoren: 2x 350W DC 24V Bürstenmotor mit Getriebe (Suchbegriff: "Motor> fuer E-Scooter")
Kannst du für die Motoren bitte einen Link setzen? Würde mich freuen
Stefan ⛄ F. schrieb:> Dann probiere andere niedrige Frequenzen. Ziel sollte sein, die PWM> Frequenz so niedrig wie möglich anzusetzen, um die Schaltverluste zu> reduzieren.
Aber was ist mit dem Motor der hat auch Gefühle :(
Wenn die Frequenz niedriger ist steigen die Verluste dort :/
Jonny S. schrieb:> Deshalb suche ich gerade nach einer Möglichkeit den Maximalstrom der> Batterie oder die von den Motoren aufgenommene Stromstärke mit möglichst> wenig Aufwand auf max. 100A zu begrenzen.
Das macht doch dein Motor für dich....
Die Induktivität des Motors begrenzt den Strom sofern er richtig
angesteuert wird. Hat schon seinen Grund das man bei Motoren einen
Stromregelung macht. Dein Problem ist Überspannung. Die Schaltfrequenz
kann man auch nicht einfach willkürlich wählen, die sollte schon
einigermaßen zur Motor Induktivität passen, Stichwort Stromrippel.
Jonny S. schrieb:> Ich bin mir sicher, dass die "zu starken" Batterien das Problem> verursachen, diese also zu viel Strom zur Verfügung stellen. Für die> H-Brücken reicht wohl ein Überschreiten der 100A im> Millisekundenbereich, um diese zu zerstören.
Was ein quatsch, siehe oben....
Vermutlich killt das Bürstenfeuer der Motoren deine FETs weil keine
Schutzmaßnahmen vorhanden sind.
wer schrieb:> Mit H-Brücken auf auf Basis von BTS7969. Man kriegt die als fertiges> Modul auf eBay, allerdings ist die Kühlung da so schlecht, dass man> nicht mehr als 5A damit erzielen kann.
Danke für die Tipps!!
Genau solche Module habe ich tatsächlich als Erstes probiert (siehe
erster Post, erster Link). Die angebliche Kurzschluss- und
Übertemperaturerkennung haben mich damals überzeugt - haben aber auch
nicht besonders lange durchgehalten. Werde es mit diesen (da noch welche
vorhanden) wohl nochmal genau wie du, mit verbesserter Kühlung und durch
Stromsensoren angepasster Rampenansteuerung nochmal probieren.
Da es bei dir offensichtlich funktioniert, obwohl meiner Meinung nach
der Nennstrom der Treiber von nur 43A nicht wirklich zu meinen Messungen
passt.
Tippgeber schrieb:> Dann hast Du den Sinn einer PWM nicht verstanden. Der Motor hat eine> Induktivität, wenn die Brücke einschaltet, steigt der Strom, wenn sie> ausschaltet, sinkt er. Da bremst zunächst nichts. Erst wenn der Strom> rückwärts fließt.
Danke für die Erklärung und die weiteren Hinweise!
Ja, das habe ich ehrlich gesagt im Detail wirklich nicht ganz verstanden
:)
So ähnlich habe ich das aber auch schon vorgestellt. Wenn ich es richtig
verstehe ist dann die PWM Frequenz sehr entscheidend? Beispielsweise
würde doch bei theoretisch übertrieben niedriger PWM Frequenz (z.B. 5Hz)
trotzdem der Motor immer kurz beschleunigen und durch die sehr lange
Aus-Zeit in jeder Periode wieder bremsen. So habe ich mir das zumindest
ursprünglich vorgestellt und deswegen auf Verdacht die Frequenz erhöht.
Trotzdem finde ich (mit dem aktuellen Verständnis) den Treiber mit
dieser Art von Ansteuerung unpraktisch, da es nicht möglich ist das
Fahrzeug bei 0% PW frei rollen zu lassen (Freilauf) da der Motor immer
gebremst hat.
Obwohl bei der aktuellen, anderen Methode (bei der nur ein Mosfet
dauerhaft an und ausschaltet) der Stromfluss ja immer wieder
unterbrochen wird und somit hohe Induktionsspannungen vom Motor
entstehen?
Tippgeber schrieb:> Ich denke, die Platinen sind weniger wegen Strom, sondern wegen> Überspannung durch Induktion in den Leitungen gestorben.> Man implementiert eine Spannungs- und Stromregelung.
Den Zusammenhang mit Spannung Drehzahl und Strom Drehmoment verstehe
ich, aber wie implementiert man so eine Stromregelung? Durch aktives
Messen des Motorstroms und Drehzahl?
Guest schrieb:> Die Induktivität des Motors begrenzt den Strom sofern er richtig> angesteuert wird. Hat schon seinen Grund das man bei Motoren einen> Stromregelung macht. Dein Problem ist Überspannung. Die Schaltfrequenz> kann man auch nicht einfach willkürlich wählen, die sollte schon> einigermaßen zur Motor Induktivität passen, Stichwort Stromrippel.
Wenn ich also die Ansteuerung (PWM Frequenz, Rampe...) richtig umsetze
kann ich somit auch Stromspitzen im ms Bereich komplett verhindern?
(vgl. Messungen Einschaltstrom)
Interessant, werde mich mal informieren und versuchen den Motor zu
messen und dementsprechend eine geeignete PWM Frequenz zu wählen.
Guest schrieb:> Was ein quatsch, siehe oben....> Vermutlich killt das Bürstenfeuer der Motoren deine FETs weil keine> Schutzmaßnahmen vorhanden sind.
Durch die Strombegrenzung mit dem 0,2 Ohm Widerstand in Serie zu den
Batterien funktioniert es ja eben problemlos, müsste da nicht auch
Überspannung entstehen, oder wird das eben durch die Strombegrenzung
verhindert? Wegen diesem Versuch dachte ich eben, mit schwächeren
Batterien hätte ich das Problem einfach nicht gehabt^^
Wie könnte man solche Schutzmaßnahmen realisieren? Passive
Freilaufdioden sind bei einer H-Brücke ja nicht sinnvoll. Es sollten
wohl eher aktiv gesteuerte auf dem Treiber vorhanden sein, welche diese
billigen wahrscheinlich nicht haben.
Nickel schrieb:> Kannst du für die Motoren bitte einen Link setzen? Würde mich freuen
Wie oben erwähnt, mit Suchbegriffen wie Scooter Motor oder Fahrradmotor
findet man viele Händler die diese Motoren aber auch zu
unterschiedlichsten Preisen verkaufen^^
https://www.ebay.de/itm/24V-350W-Elektromotor-Burstenmotor-Getriebemotor-fur-Elektrofahrrad-E-Bike-Neu/264474969945
Jonny S. schrieb:> Da es bei dir offensichtlich funktioniert, obwohl meiner Meinung nach> der Nennstrom der Treiber von nur 43A nicht wirklich zu meinen Messungen> passt.
Ich weiß nicht was du erwartest... 24V*43A sind über 1000W und du
benutzt 350W Motoren. Dass du bei deinen Messungen die Motoren komplett
überlastet hast und sie das augenscheinlich überlebt haben, heißt nicht,
dass das zielführend ist. Die Motoren sind für ca. 18A continuous und
31A peak spezifiziert. Das ist für ein Fahrzeug in der Gewichts- und
Geschwindigkeitsklasse eines elektrischen Rollstuhls auch deutlich mehr
als ausreichend.
Jonny S. schrieb:> Passive> Freilaufdioden sind bei einer H-Brücke ja nicht sinnvoll.
Die sind in Form von Bodydioden so oder so mit den FETs drin. Auch in
billigen H-Brücken.
Jonny S. schrieb:> Es sollten> wohl eher aktiv gesteuerte auf dem Treiber vorhanden sein, welche diese> billigen wahrscheinlich nicht haben.
Aktiver Freilauf heißt nur, dass man einen FET im Freilauf durschaltet,
wodurch man sich eine Dioden-Vorwärtsspannung spart. Viel macht das
nicht aus, geht auch ohne.
Schau dir mal die verschiedenen Betriebsarten einer H-Brücke an. Wie
Tiefsetzsteller und Hochsetzsteller funktionieren sollte man vorher
lernen, falls nicht bekannt, denn darauf läuft es größtenteils hinaus.
Jonny S. schrieb:> Die Getriebe am Motor haben bereits ein> Übersetzungsverhältnis von 1:9,78. Das, in Kombination mit den kleinen> Reifen, ergibt aktuell eine Geschwindigkeit von ~8,5km/h bei 2500U/min> Motordrehzahl.
Sicher? Denn bei angenommener 1:1 Übersetzung zwischen Getriebeabtrieb
und 25cm Reifen komme ich auf 12km/h.
wer schrieb:> Sicher? Denn bei angenommener 1:1 Übersetzung zwischen Getriebeabtrieb> und 25cm Reifen komme ich auf 12km/h.
Ja, sollte schon passen.
Der Kettentrieb reduziert bei mir mit einem Übersetzungsverhältnis von
1,4 (z=20 auf z=28) auch noch etwas (auf dem Photo schlecht zu
erkennen).
Gerechnet mit einem Reifendurchmesser von 24,5cm bin ich auf 8,43km/h
gekommen.
Wenn die Teile ankommen, werde ich Motorseitig auf z=16 oder z=10 und
Reifenseitig auf z=38 gehen. Also nochmal deutlich langsamer, da 3-5
km/h für diese Anwendung völlig ausreichen, mehr Kontrolle bietet und
mir evtl Ärger mit den Motoren und Treibern erspart :)
wer schrieb:> Ich weiß nicht was du erwartest... 24V*43A sind über 1000W und du> benutzt 350W Motoren.
Das dachte ich mir anfangs auch, mit 20A Motor-Nennstrom sollten diese
ja ausreichen, aber einige aus dem Forum haben mich etwas verunsichert,
dass man man deutlich größer dimensionierte Treiber (Blockierstrom?)
nehmen müsste.
Umso besser, werde es also mal mit dem selben Setup von dir realisieren
:)
Danke für die weiteren Erklärungen!
wer schrieb:> Dass du bei deinen Messungen die Motoren komplett> überlastet hast und sie das augenscheinlich überlebt haben, heißt nicht,> dass das zielführend ist.
Zielführend ist das natürlich nicht, es ging darum eine Vorstellung von
den theoretisch vorkommenden Strömen zu erhalten.
Mit dem Überlasten der Motoren habe ich sogar etwas Erfahrung xD
Da ich einen solchen Motor, vor langem bei einem anderen Projekt ohne
Ansteuerung, mal über lange Zeit hoffnungslos vmtl. bei >60A gequält
habe. Der wurde dann erst richtig heiss, bei erneuter weiterer Belastung
ist dann eines Tages der Spulenlack in Form von weißem Rauch bei den
Kabeln herausgeströmt (siehe Photos).
Damit will ich nur andeuten, dass diese erfahrungsgemäß sogar ganzschön
viel Misshandling mitmachen - was man natürlich absolut vermeiden
sollte!
Also immer möglichst im Nennbereich betreiben^^
Ich will gar nicht weiter vom eigentlichen Thema abschweifen :)
Jonny S. schrieb:> Das dachte ich mir anfangs auch, mit 20A Motor-Nennstrom sollten diese> ja ausreichen, aber einige aus dem Forum haben mich etwas verunsichert,> dass man man deutlich größer dimensionierte Treiber (Blockierstrom?)> nehmen müsste.
Na, der Treiber muss die Ströme verkraften die du fließen lassen
willst. Du musst dafür sorgen, dass der Strom in einem für alle
Bauteile gesunden Bereich bleibt.
Auch im blockierten Zustand fließt nicht magischerweise ein rießen
Strom, der fließt nur, wenn du weiterhin eine hohe Spannung anlegst.
Dein Vorwiderstand ist eine Möglichkeit, aber wie du selbst sagst, eine
absolute Verschwendung von wertvoller Energie.
Den Strom messen und gegebenenfalls über die Spannung (lies: PWM Duty
Cycle) reduzieren ist die schönere Möglichkeit.
Die dritte Möglichkeit wäre das geforderte Drehmoment (und damit den
Strom) in einem gesunden Bereich zu halten. Das wird bei so einem
Hobbyprojekt kaum zu garantieren sein, denn das hieße vorsichtig damit
umgehen und eben nicht Draufsetzen und mit Vollgas losfahren. Wenn du
so Freunde hast wie ich, ist es eine Frage von Minuten bis irgendein
Dödel genau das tut.