Hallo, ich bin ganz neu hier und habe ein Projekt im Kopf, für das ich noch die richtige Ideen benötige. Ich möchte eine Art Messagen realisieren. Diesen Wagen möchte ich in 2 Achsen (X und y) auf bestimmte Positionen fahren können (jeweils 50cm weiter) in der X-Achse brauche ich 5 Positionen in der Y-Achse 12 Positionen. Der Wagen selbst soll in der Y-Achse in U-Profilen mit 4 Rädern fahren Die X-Achse soll auf den Wagen montiert werden, auf welcher das Messgerät in der X-Achse verfahren kann. Folgende Ideen habe ich dazu: Ich möchte an den Wagen 1-2 Schrittmotoren oder DC Motoren anbringen um in den Schienen der Y-Achse zu fahren. An der X-Achse möchte ich ebenfalls einen Schrittmotor oder DC Motor anbringen. Der Wagen hat ca. 20-30 Kg, das Messgerät auf der X-Achse nur wenige hundert Gramm. Für normale DC Antriebe würde ich an den Positionen jeweils Induktive oder kapazitive Sendoren anbringen, bei Stepper Motoren müsste man das eben programmtechnisch realisieren. Was wäre denn für dieses Projekt das vernünftigste?? DC-Motor oder Stepper? Was wäre hierfür Elektrotechnisch das sinnvollste? Arduino, Rasppbery, ...? Da ich mich in den Mikrokontrollern nicht fit bin, müsste ich mich in alles rein knien, also wäre es auch geschickt wenn es relativ einfach wäre. Ich freue mich auf Eure Ideen. Danke Griß Günter
Was willst du damit messen? Guenter S. schrieb: > Da ich mich in den Mikrokontrollern nicht fit bin Das lässt sich ändern.
Guenter S. schrieb: > Der Wagen hat ca. 20-30 Kg, das Messgerät auf der X-Achse nur > wenige hundert Gramm. Wie schnell soll sich das denn Bewegen? Wie genau Positioniert werden? 2,5m Ausladung wird nicht einfach.
Die 2,5 Meter Ausladung ist nicht das Problem. Der Wagen ist mittig und er hat selbst schon fast 1 Meter breite. Ergo stehen auf jeder Seite nur 1,25 Meter raus. Mechanisch ist auch schon alles fertig und funktioniert bereits, allerdings muss man alles manuell schieben. Mir geht es also nur um die automatisierung des Wagens. Von der Geschwindigkeit muss es nicht schnell sein. Die Genauigkeit sollte vielleicht auf 5-10mm genau sein, also ziemlich grob.
Beitrag #6337090 wurde von einem Moderator gelöscht.
TR.0LL schrieb: > Was willst du damit messen? > > Guenter S. schrieb: >> Da ich mich in den Mikrokontrollern nicht fit bin > > Das lässt sich ändern. ...Ja, das möchte ich schon lange ändern, hatte nur noch nicht die Muse dazu. Arduino, raspberry, bread boards Sensoren etc ist alles schon vorhanden.
Guenter S. schrieb: > Was wäre denn für dieses Projekt das vernünftigste?? DC-Motor oder > Stepper? Hängt vom Gewicht und der Geschwindigkeit ab. Klein und leicht: Stepper. Gross und schwer: DC Motoren mit Encoder. Dein Messgerät ist klein und leicht, dein Wagen irrsinnig schwer. Autoakku an Bord ? Guenter S. schrieb: > jeweils Induktive oder kapazitive Sendoren anbringen Eher nicht, sondern Lichtschranke oder Hallsensor, der die Umdrehungen des Motors zählt, der dann per Getriebe auf die Achse reduziert wird. Das wird wohl genau genug bei deinen 50cm Positionen. Guenter S. schrieb: > Da ich mich in den Mikrokontrollern nicht fit bin, müsste ich mich in > alles rein knien, also wäre es auch geschickt wenn es relativ einfach > wäre. Es ist so einfach, es geht notfalls auc ohne uC. Der Schrittmotor läuft immer n Schritte für 50cm. Das kann man per Taktgeber und Zähler lösen. Erzeugt der Zähler einen Überlauf, misst man, dann startet der Zähler neu. Mach 5 Überläufen muss er wieder auf 0 (dafü rgibt es unterschiedliche verienfachende Lösungen, ich würde einen Endtaster vorschlagen), und der Hauptmotor bekommt Strom bis sein Sensor sagt, daß genügend Umdrehugen für 50cm zusammengekommen wird. Nach 12 davon fährt er gegen einen Anschlug und ein Schalter schaltet alles aus. Das ist konventionelle Elektronik kleiner als eine Europakarte. Oder eben ein Arduino mit Motortreibern.
Arduino ist hier ausreichend, und man muß sich nicht noch extra mit einem Betriebssystem auseinander setzen. "Nicht schnell" ist twas unpräzise. Etwas kräftigere Schrittmotoren könnten ausreichen. Bewege doch mal die Achsen mit einer Federwaage.
Angehängte Dateien:
-

Corona_Uhr.jpg
240 KB
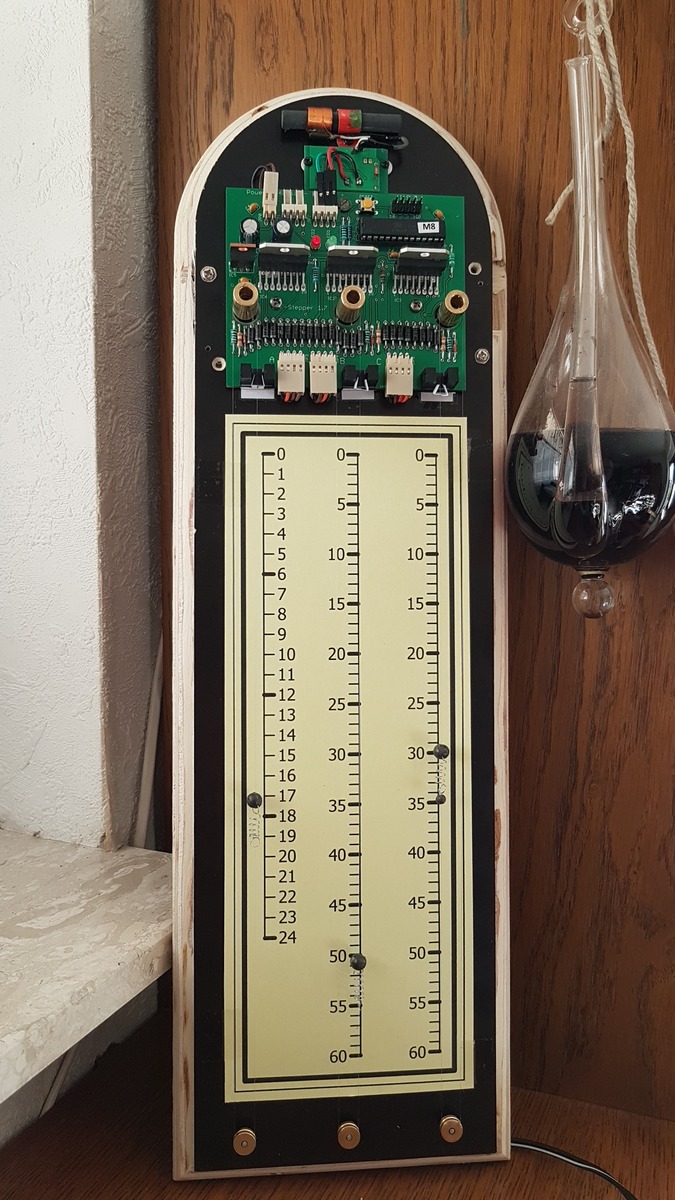
Ich empfehle Schrittmotoren, Zahnriemenantrieb, Schrittmotortreiber und Arduino. Stromversorgung nicht vergessen. Software ist relative einfach machbar. Tastensteuerung und zeitsynchrone Steuerung? Fernbedienung wie beim Fernsehen? Für meine Corona-Uhr habe ich gerade eine Platine mit 3 x L298-Motortreiber gebaut. Hier sind die Schrittmotoren durch Stecker angeschlossen und hinter der Platine untergebracht. Diese Platine würde mit entsprechender Software ausreichen um dein Projekt zu steuern.
Die Y Achse mit dem schweren Wagen könnte man über Löcher in der Schiene und einer Lichtschranke erkennen, falls die Positionen fest sind. Oder durch kleine Magnete und einem induktiven Sensor. Sie leichte X-Achse wie schon gesagt mit Schrittmotor und Schritte zählen.
Udo S. schrieb: > Sie leichte X-Achse wie schon gesagt mit Schrittmotor und Schritte > zählen. Das geht nur so lange gut solange der Stepper keine Schritte verliert
Vielen Dank für die zahlreichen Tipps. Auf die Frage wenn daa eigentliche Messgerät so leicht ist, der Wagen aber so schwer kann ich das wie folgt erklären. Wie erwähnt muss das Messgerät in der X-Achse ca 3 Meter Verfahren, der Wagen selbst muss 6 Meter Verfahren. Das Messgerät muss in 1 Meter Höhe sein. Alles ist mit 40x40 Bosch Profilen erstellt. 4 Räder mit 150mm Durchmesser, da kommen bestimmt 20 kg zusammen.... aaaber. Der Wagen muss ja nicht getragen sondern nur in Bewegung versetzt werden. Die Räder sind kugelgelagert und laufen ziemlich leicht, der komplette Wagen lässt sich ohne Kraftaufwand verschieben da er auf glatten Aluminium Profilen läuft. Wenn das einfach mit stepper realisierbar ist, sehr gut. Wenn das Risiko des Schrittverlust sehr groß ist, wäre eine Lösung mit lichtschranke oder Sensoren besser. Was die Geschwindigkeit angeht, gehe ich mal von Schritt Geschwindigkeit, Ist aber nicht maßgeblich. Ich habe in summe 5X12 Positionen, an denen ich eine Messwert aufnehmen muss. Das wären 60 position en. Wen er 10 Sekunde für 50 cm braucht, wäre das völlig ausreichend.
kenny schrieb: > Das geht nur so lange gut solange der Stepper keine Schritte verliert Wer natürlch Schrittmotore falsch auslegt, zu wenig Strom bereitstellt, keine Beschleunignugsrampe nutzt wenn notwendig, der verliert. Der ist aber als Ingenieur komplett untauglich.
Wolfgang S. schrieb: > Ich empfehle Schrittmotoren, Zahnriemenantrieb, Schrittmotortreiber und > Arduino. Stromversorgung nicht vergessen. > Tastensteuerung und zeitsynchrone Steuerung? > Fernbedienung wie beim Fernsehen? Fernbedienung wäre cool. Muss nicht automatisch ablaufen. Theoretisch würden 4 Taster (x+ x- y+ y-) reichen. Pro Tastendruck zur jeweilig nächsten position (50cm weiter).
> Wer natürlch Schrittmotore falsch auslegt, > zu wenig Strom bereitstellt, keine > Beschleunignugsrampe nutzt wenn notwendig, > der verliert. Deshalb die Fragestellung. Wenn es mit Schritte zählen das einfachste wäre, wäre dann vielleicht auch ein reset (gehe zurück auf los) denkbar? Dann könnte ich sogar mit einem Schrittverlust leben.
Guenter S. schrieb: > Deshalb die Fragestellung. Wenn es mit Schritte zählen das einfachste > wäre, wäre dann vielleicht auch ein reset (gehe zurück auf los) denkbar? > Dann könnte ich sogar mit einem Schrittverlust leben. Ich hatte so etwas mit Schrittmotoren aufgebaut und habe danach, nachdem ich mir das alles angesehen habe und den Code dafür geschrieben habe damit sich alles bewegt ein paar Erleichterungen "einfallen" lassen. Das mit den Schrittmotoren und Schritten hört sich im ersten Moment ja ganz toll an, aber bei dem Motoren des 3D-Druckers hatte jemand aus meiner Uni hier so viele Probleme dass dieser Schrittverlust jedes mal es ihm unmöglich machte dieses Gerät zu nutzen. Im Endeffekt war es für ich besser wenn ich normale Motoren (oder auch BLDC-Motoren) nutze und eine Encoderscheibe an der Achse befestige, durch die ich mittels zweier Lichtschranken die aktuelle Position erkennen kann. Der Energieverbrauch war geringer, das ganze System viel leiser und durch den optischen Encoder (die Encoderscheibe war an sich recht grob) hatte ich ein verschleißfreies Bauteil welches mir die Achsenposition übermittelt hat. Ich hatte eine gewisse Übersetzung drin, also der Motor war über einen Zahnriemen mit der Achse verbunden. Die Teile gab es alles bei einem Händler zu kaufen. (weiß aber nicht mehr wie die Webseite hieß) Erst wollte ich mir die Teile bei eBay bestellen, aber das konnte man echt vergessen, die hatten vieles nicht und sie hätten dann auch bestimmt nicht zueinander gepasst.
Mike J. schrieb: > bei dem Motoren des 3D-Druckers hatte jemand aus > meiner Uni hier so viele Probleme dass dieser Schrittverlust Das übliche Leiden wenn der Motor zu klein für die nötige Kraft ist. Nächstes Problem sind die Endanschläge. Wenn ich heute so ein Gerät erfinden mußte, würde ich mir mal einen Flachplotter genauer ansehen. xy geht auch mit Stahlseilen und Taktscheibe.
Beitrag #6337272 wurde von einem Moderator gelöscht.
> @Threadstarter: Schau dir mal Raspis mit NodeRED an. Kann ziemlich viel > und ist sehr einfach zu bedienen. Keine Programmierkenntnisse nötig (es > sei denn, du willst eigene Nodes schreiben). Hört sich interessant an... Was wären da dann für Motoren nötig?
2,5 x 6 m - Auto einscannen?
Bei Angst vor Schrittverlust und festem Raster könnte an allen Punkten
ein Sensor ansprechen (fahre x Schritte oder bis Sensor oder Timeout).
Bauer 2 schrieb im Beitrag #6337272:
> Bei aktuellen Raspbians
gibt es m.W. nicht mehr, heisst "Raspberry Pi OS"
A. So. schrieb: > 2,5 x 6 m - Auto einscannen? geht nicht um einscannen sondern um an verschiedenen Punkten Messungen der Lichtstärke durchzuführen. > Bei Angst vor Schrittverlust und festem Raster könnte an allen Punkten > ein Sensor ansprechen (fahre x Schritte oder bis Sensor oder Timeout). ...genau an so etwas hatte ich gedacht. Induktivsensor gibts beim Chinamann schon für etwas über einen Euro. Die Frage war ja dann, wie ich das am besten programmieren könnte und was ich für Motoren benötige. Wären in dem Fall mit Sensoren auch Schrittmotoren empfehlenswert oder andere Motoren besser? Die Deluxe Variante wäre wie wieter oben erwähnt 4 Taster (X+ X- Y+ Y-) um immer die nächste oder die letzte Position anzufahren.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.