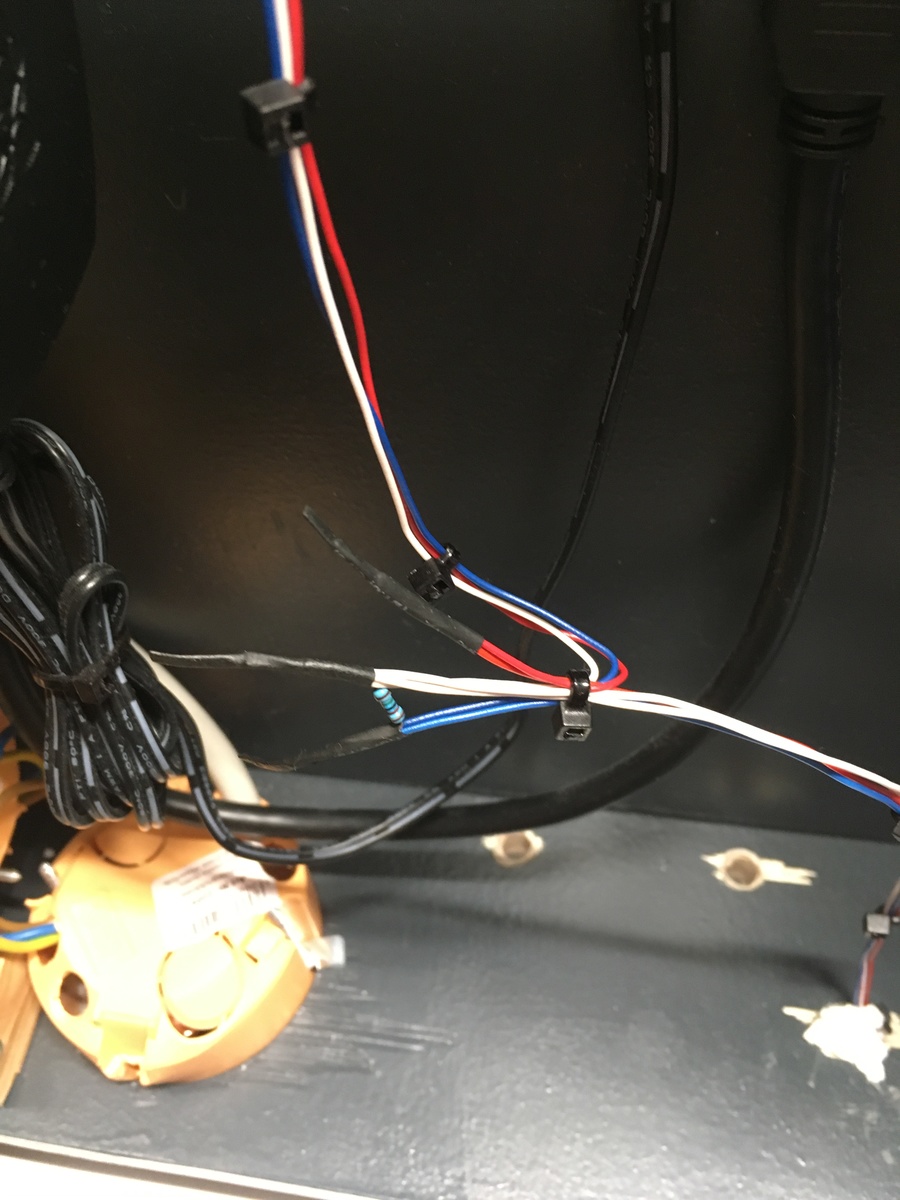

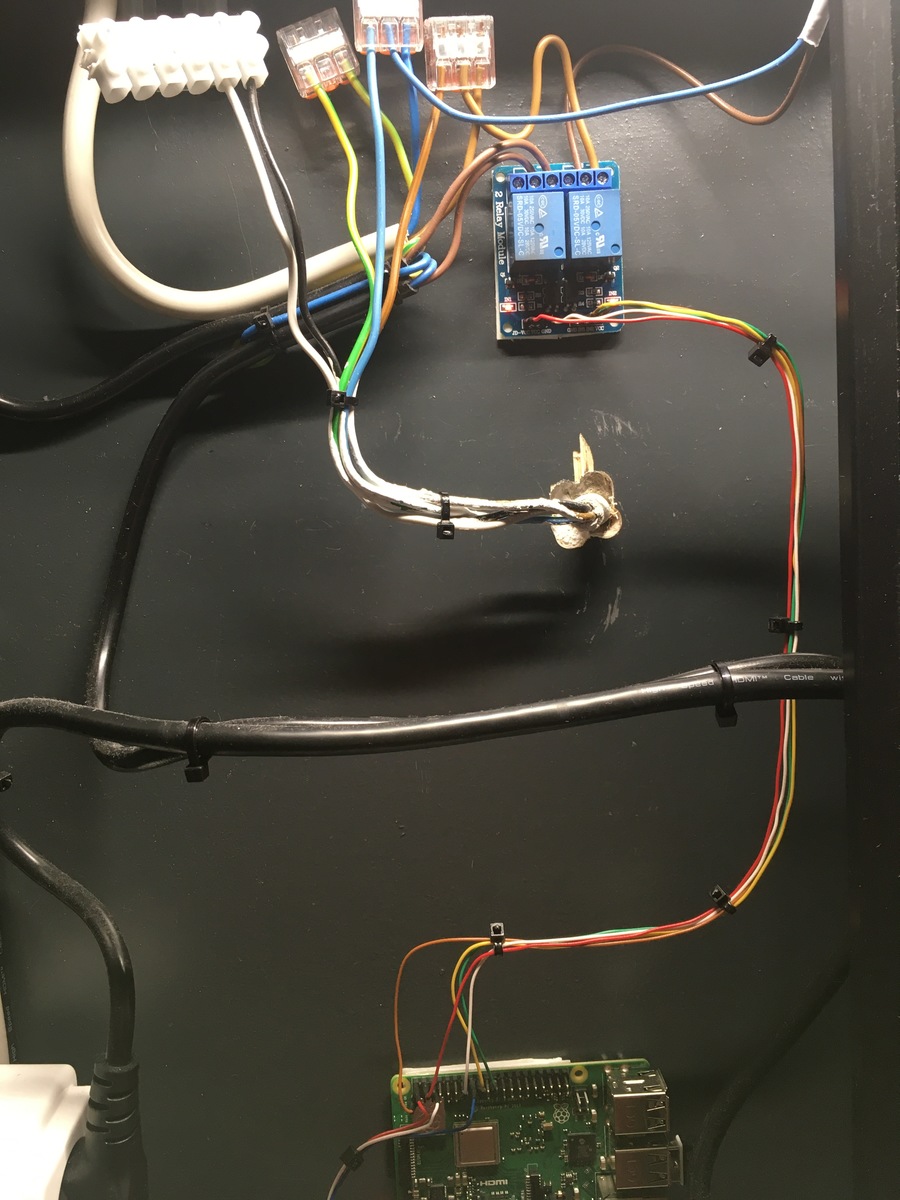
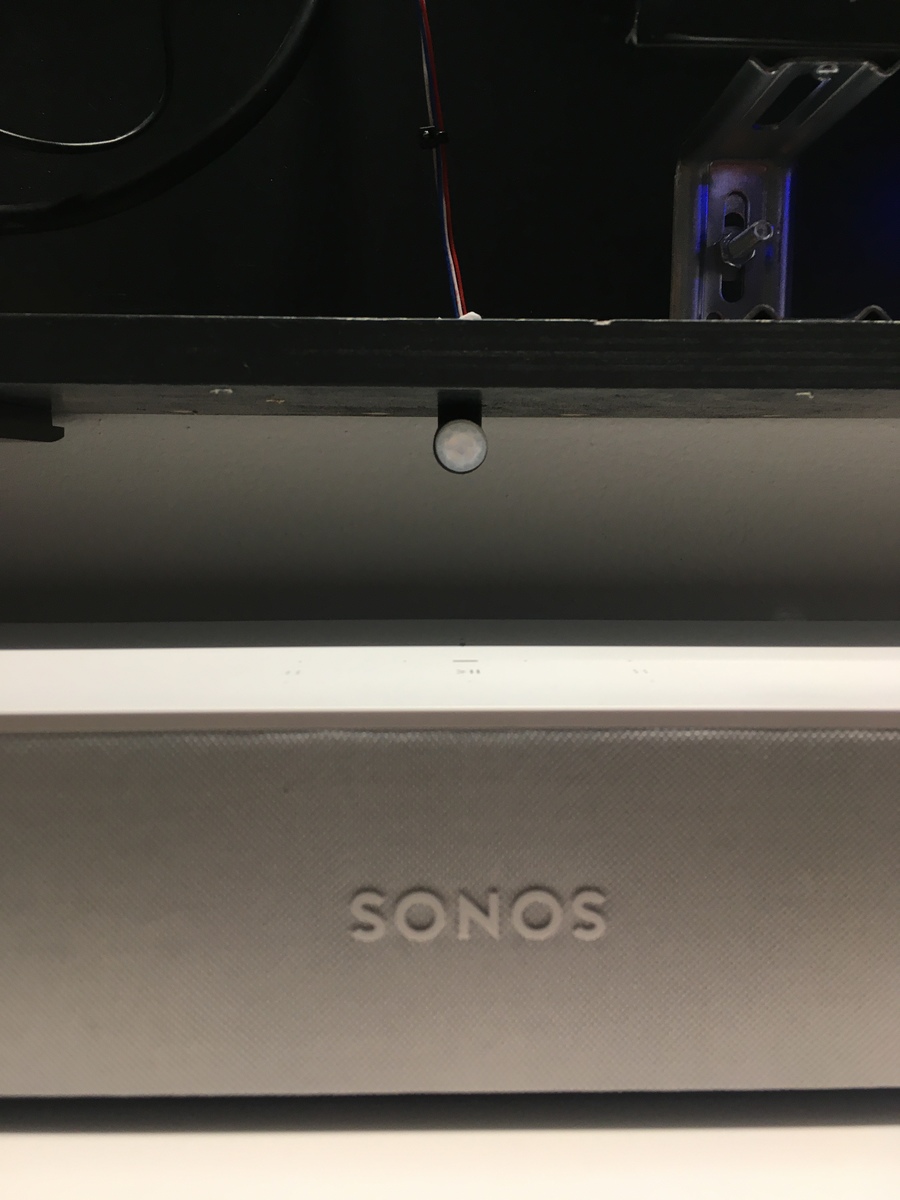

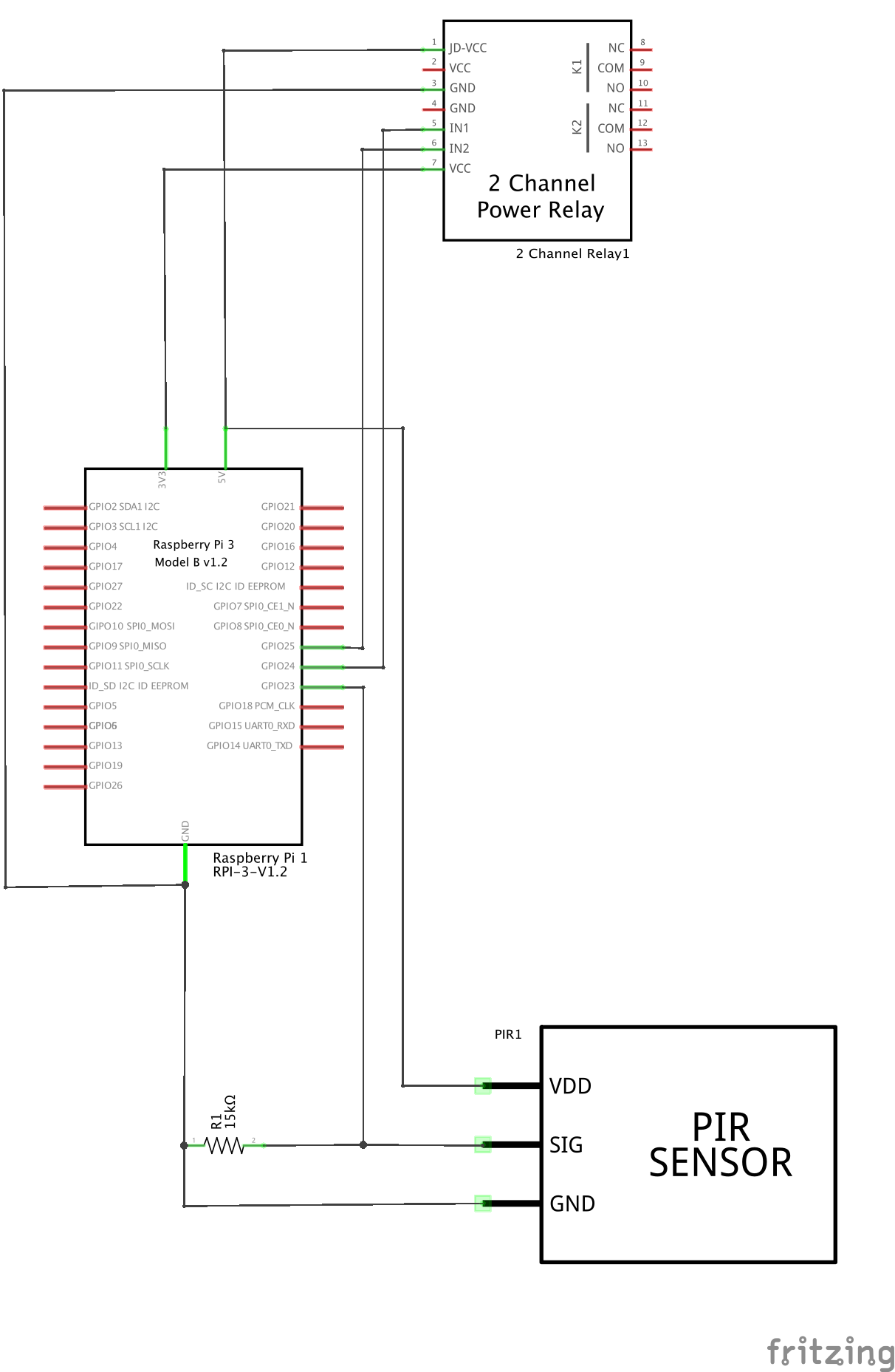
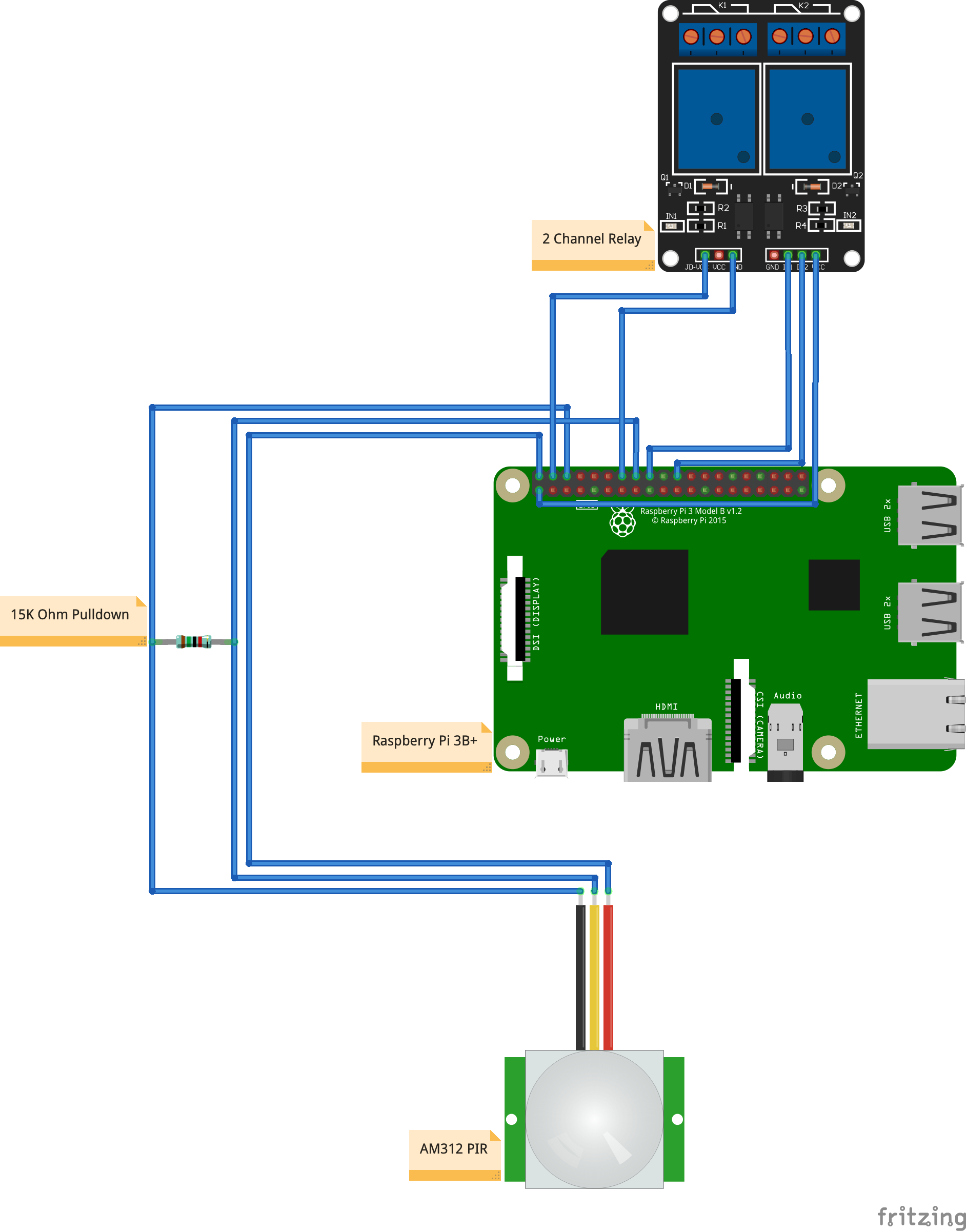
Hallo Community, Ich habe mir einen Smart Mirror gebaut aber leider ein Problem mit einer Schaltung. Auf einem Raspberry Pi 3b+ läuft ein Python Script, dass durch einen AM312 Infrarot Sensor 2 Relais schaltet. Je nach Aufbau der Schaltung habe ich einige Fehltrigger pro Tag bis ein paar pro Stunde, die ich einfach nicht wegbekomme. Unter dem Smart Mirror steht eine Sonos Soundbar. Ist diese eingeschaltet habe ich Fehltrigger. Ist sie ausgeschaltet habe ich keine. Daher bin ich mir eigentlich sicher, dass die Fehltrigger durch WLAN Einstreuungen der Soundbar entstehen und nicht durch Spannungsspitzen oder WLAN Einstreuungen vom Raspberry. Das Relaismodul ist aktiv low, der Bewegungsmelder aktiv high und da das Script bei jedem Trigger vom Bewegungsmelder eine Meldung auf dem Terminal ausspuckt kann ich auch sagen, dass die Fehltrigger vom Bewegungsmelder kommen und das Relaismodul nicht sporadisch schaltet. Ich habe es mit verschiedenen Pulldown Widerständen versucht und bin letztendlich bei 15k gelandet da ich so am wenigsten Fehltrigger hatte und bei 10k überhaupt kein Trigger ankam was wahrscheinlich daran liegt, dass der Bewegungsmelder nicht stark genug ist, um den GPIO dann auf high zu ziehen. Den Sensor in einen Kupferrohrbogen zu setzen, um ihn zu schirmen, brachte auch keine Besserung. Am Rohr ist ein Kabel angelötet, um diesen Schirm mit GND zu verbinden. Aber diesen Schirm mit GND zu verbinden sorgte sogar für mehr Fehltrigger. Mittlerweile habe ich auch alles verlötet, um Kontaktprobleme vom Breadboard auszuschließen. Bevor ich alles verlötet hatte, hatte ich das Signalkabel des Sensors sogar durch 2 Ferritkerne eines VGA Kabels laufen lassen, aber auch das brachte keine Verbesserung. Wenn ich den Sensor abgezogen habe und die Verkabelung unverändert blieb, habe ich keine Fehltrigger gehabt, weswegen ich nicht glaube, dass die Kabel in diesem Fall als Antenne wirken. Im Anhang habe ich einen Schaltplan, eine Grafik und Bilder des Aufbaus. Komischerweise hatte ich keine Fehltrigger als ich den Pulldown im Aufbau auf Bild 1 rausgenommen hatte. Hab es dann ein paar Tage so laufen gelassen, um sicher zu gehen das es wirklich läuft und danach nochmal ordentlich wie auf Bild 5 verkabelt aber jetzt ungefähr jede viertel Stunde einen Fehltrigger. Eventuell hatte ich vorher eine schlechte Lötstelle, die für einen kleinen Widerstand sorgte, was mich auf Idee 4 brachte. Für die Ideen, die ich noch habe, fehlt mir das Wissen oder ich bin mir unsicher ob ich damit einen Defekt der Komponenten riskiere. 1. Den Schirm des Sensors mit dem Schutzleiter der 230v Leitung verbinden, um ihn wirklich zu erden. Ist das überhaupt sicher? 2. Einen Low-pass Filter für die Signal Leitung vom Bewegungsmelder bauen. Welche Bauteile und welche Werte nehme ich da? 3. Den Pulldown an eine andere Stelle setzen. Näher an den Sensor? Näher an den Pi? 4. Einen Widerstand zwischen Output des Sensors und den Pi schalten, um schwache Ströme abzufangen. Welchen Wert? Schon mal danke für jede Hilfe und Zeitinvestition!
Angehängte Dateien:
-

Bild_1.JPG
230 KB -

Bild_2.JPG
230 KB -

Bild_3.JPG
220 KB -

Bild_4.JPG
200 KB -

Bild_5.JPG
240 KB -

Schaltplan.png
120 KB -

Grafik.png
200 KB
Hi In diesen Links https://www.roboter-bausatz.de/media/pdf/64/ea/93/AM312.pdf https://www.komputer.de/wordpress/wp-content/uploads/2019/10/cz-am312.pdf kann ich nichts zu einem PullDown Widerstand finden. Deine Antennen-Konstruktion aus ungeschirmten Kabeln halte ich für gewagt. Ich würde diesen Konstrukt durch geschirmtes Kabel (Schirmung einseitig an Masse) ersetzen. MfG Spess
Marius G. schrieb: > [Bilder] mit vielen langen Drähten (Antennen) > 2. Einen Low-pass Filter für die Signal Leitung vom Bewegungsmelder > bauen. Welche Bauteile und welche Werte nehme ich da? Der AM312 brauch ja nur 15 µA => ~100R(besser einige µH) + 100nF|10µF oder so.
1.) 100µF Kerko (z.B. Mouser 963-JMK325ABJ 107MM-P) direkt beim PIR zwischen Vdd und Ground Anschluss. 2.) RC Tiefpass beim RPI Eingang. Dimensionierung untere Grenzfrequenz soweit die Verzögerung akzeptabel ist. Achtung : die erste Maßnahme ist die wichtigere, denn ein eimal vorhandenes Fehlsignal bringt man schlecht weg!
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.