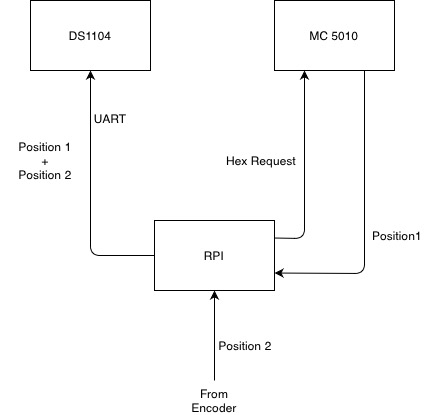
Liebe Forum-Nutzer, seit meiner letzten uC Programmierung sind mittlerweile gute 12 Jahre vergangen. Nun habe ich eine Applikation, die möglichweise am bestens von einem uC gelöst werden kann. Hoffentlich bekomme ich von Euch Tipps, wie ich das Problem am besten lösen kann. Ich habe zwei Encoder, die über RS232 ihre Daten an ein dSPACE DS1104 board schicken. Leider hat ein DS1104 board nur eine einzige PHY-Schnittstelle, deshalb brauche ich eine Art Multiplexer zwischen den Encodern, der die Daten empfängt und sie über eine RS232 ans DS1104 schickt. Dieser Multiplexer muss die Position bei einem Encoder explicit anfragen. Ich dacht erstmal an einen Raspberry Pi (PRI) mit einem zusätzlichen 2-Channel Isolated RS232 Expansion HAT (https://eckstein-shop.de/WaveShare-2-Channel-Isolated-RS232-Expansion-HAT-for-Raspberry-Pi ). Die beiden RS232 sind für die Kommunikation mit dem Encoder besetzt. Daher wird noch eine dritte RS232 Schnittstelle für die Kommunikation mit dem DS1104 benötigt und diese soll mit einem USD-RS232 Adapter gelöst werden. Ein Foto von dem ganzen findet Ihr im Anhang. Irgendwie gefällt mir die Lösung nicht und finde sie einfach viel zu umständlich. Ein Mikrocontroller mit einer RS232 Extension karte soll das Problem auch meistern können. Habt ihr Ideen, Tipps von solcher Hardware? Ich wäre für jede Antwort sehr dankbar! Beste Grüße Jack
Angehängte Dateien:
-

Connnection_Diagram.jpg
15 KB
Ich würde da eins der günstigen Boards mit STM32F103 ("BluePill")
nehmen. Der Controller hat 3 UART Schnittstellen, somit brauchst du nur
noch passende Pegelwandler (MAX2323 o.ä.).
Was genau hast du denn mit dem dSpace-System vor bzw. wie zeitkritisch ist denn die Auswertung der Encoder? Ich Frage, weil ich selbst schon mit solcher Hardware und RS232 gearbeitet habe und das war ein unendliches Gefrickel, was die Programmierung (mit Matlab/Simulink) angeht, vor allem in einem System in dem harte Echtzeit gefordert ist. Grundsätzlich ist RS232 1. "schnarchlangsam" (kommt natürlich auf die Ansprüche an aber RS422 wäre grundsätzlich besser) 2. fehleranfällig, da es keine Fehlererkennung auf Hardwareebene gibt (da wäre z.B. CAN klar im Vorteil) 3. "kompliziert" auszuwerten (zumindest innerhalb eines Simulink-Systems), da wäre eine parallele Schnittstelle - sofern du denn eine frei hättest - zu bevorzugen Aus persönlicher Erfahrung würde ich eine parallele Schnittstelle empfehlen, wenn das irgendwie umzusetzen ist. Der Aufwand im dSpace das auszuwerten ist einfach am geringsten und eine Encoder zu Parallelportumsetzung ist mit einem Mikrocontroller super einfach zu machen. Meine Empfehlung dahingehend: Besorg dir einen Mikrocontroller mit CAN-PHY, einen CAN- sowie RS422-Transceiver und brutzel das alles auf eine Platine. Schau dann womit du am schnellsten zum Ziel kommst. Klingt zwar ein bisschen nach "Bruteforce" (und ist es gewissermaßen ja auch) aber man kann sich da super schnell verschätzen, was die Programmierung von seriellen Schnittstellen innerhalb von Simulink angeht. Das ist halt alles andere als intuitiv und vor allem auch durchaus anders als in C. Das fängt schon damit an, dass es in Simulink nur mit unglaublichen Verrenkungen möglich ist globale Variablen zu erstellen, die dann von mehreren Funktionsblöcken aus zugänglich sind.
Danke Julian und Christopher für Eure Antworten, ich brauche dSPACE für eine Regelung, deren Aktuatoren zwei Motoren sind, die jeweils Position geregelt sind. Dafür brauche ich die Messsignale als Feedback, in dem Fall die zwei Positionen. Mit der dSPACE Bibliothek zur Ein- und Auslesung von den RS232/RS422 ist eine Auswertung natürlich sehr einfach. Wenn man aber an freien digitalen I/Os ohne Bibliothek arbeitet, dann ist die Auswertung bzw. die Kommunikation eine ziemlich schmerzhafte Sache, da gebe ich Dir vollkommen Recht. In dem uC die seriellen Daten einlesen und dann parallel nach dSPACE schicken, scheint womöglich eine gute Lösung zu sein. Doch leider ist der parallel port schon belegt ☹. Ursprünglich dachte ich, dass ein uC beide Positionen einlesen kann und sie dann alternierend an dSPACE schickt. Dort kann man sie auslesen, was mit der dSPACE Bibliothek ziemlich einfach ist und dann die Daten wiederum alternierend extrahieren. Vlt. reicht ein Arduino https://www.arduino.cc/en/Tutorial/MultiSerialMega für diesen Zweck.
Ja D. schrieb: > Dort kann man sie auslesen, was mit der dSPACE Bibliothek ziemlich > einfach ist und dann die Daten wiederum alternierend extrahieren. Ja, es ist durchaus einfach eine Sequenz von Bytes zu empfangen, die das dSpace-System empfängt aber damit ist es leider nicht getan. Du musst ja auch irgendwie die Informationen daraus extrahieren, d.h. welcher Encoder jetzt welchen Wert hat und das heißt eben automatisch, dass du irgendeine Art von Frame benötigst, damit du weißt wo jetzt die Information anfängt und wo sie aufhört. Das wiederum in Matlab bzw. Simulink zu programmieren ist eben meiner Meinung nach durchaus etwas "gewöhnungsbedürftig". Mit der CAN-Schnittstelle habe ich mit dSpace persönlich keine Erfahrung aber zumindest in der Theorie sparst du dir schonmal das framing und die Fehlerkorrektur, weil das vom Protokoll selbst übernommen wird und deine Nutzdaten problemlos in einen Frame passen sollten. Was RS232 angeht musst du mal ins Datenblatt von deinem ds1104 schauen wegen maximaler Baudrate. Wenn ich mich recht erinnere hat das ds1103 mit dem ich gearbeitet hatte max. 115200 Baud/s mit RS232 und max 2Mbaud/s mit RS422. Für Motorregelungen könnten 115200 Baud/s schon ziemlich langsam sein. Geh mal von mindestens 30% (eher 50%) Overhead für Start- und Stoppbit, sowie dein "Protokoll" aus, dann bleiben dir unterm Strich weniger als 10 kByte/s für deine Nutzdaten, d.h. 5 kByte/s pro Kanal. Musst du halt wissen ob das für deine Anwendung reicht.
Ja D. schrieb: > muss die Position bei einem Encoder explicit anfragen. Was bedeutet das? Bei einem anfragen, beim anderen nicht? Wann sendet der andere? Vielleicht reicht ein Oder.
Christopher J. schrieb: > Ja, es ist durchaus einfach eine Sequenz von Bytes zu empfangen, die das > dSpace-System empfängt aber damit ist es leider nicht getan. Du musst ja > auch irgendwie die Informationen daraus extrahieren, d.h. welcher > Encoder jetzt welchen Wert hat und das heißt eben automatisch, dass du > irgendeine Art von Frame benötigst, damit du weißt wo jetzt die > Information anfängt und wo sie aufhört. Das wiederum in Matlab bzw. > Simulink zu programmieren ist eben meiner Meinung nach durchaus etwas > "gewöhnungsbedürftig". Mit der CAN-Schnittstelle habe ich mit dSpace > persönlich keine Erfahrung aber zumindest in der Theorie sparst du dir > schonmal das framing und die Fehlerkorrektur, weil das vom Protokoll > selbst übernommen wird und deine Nutzdaten problemlos in einen Frame > passen sollten. vielen lieben Dank. Ich würde eine Lösung mit CAN in erwägung bringen. Danke nochmal!
A. S. schrieb: > Was bedeutet das? der MC von der Fa. Faulhaber agiert nicht nur als Low-Level Controller sondern auch als Datenlogger. Eine der vielen Daten ist die Position, daher muss man eben diese eine Information anfragen und dies geschieht mit einer Adressierung eines Registers. > Bei einem anfragen, beim anderen nicht? Der andere ist einfach ein Encoder, der keine aktive Senke braucht. Er schickt auch ungefragt die Position. > Wann sendet der andere? Beide Encoder und MC wissen nichts voneinander, daher ist eine Sende-Synchronisierung gar nicht möglich
Ja D. schrieb: > Er schickt auch ungefragt die Position. Ja D. schrieb: > Beide Encoder und MC wissen nichts voneinander, daher ist eine > Sende-Synchronisierung gar nicht möglich Das wird doch trotzdem irgendwo angegeben sein, wann oder wie oft das passiert, oder?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.