Servus, Wie der Titel schon sagt, habe ich momentan ein großes Problem die Steuerung meiner Fräse zum Laufen zu bringen. Diese basiert auf einem Arduino Uno mit CNC shield (Protoneer), mein Problem ist aber eher allgemeiner Frage: Die Steuerung hatte ich getestet an Motoren mit 1A Nennstrom- keine Probleme. Verwendet wurden DRV8825 Treiber auf 0,7V Referenzspannung. Das müsste ungefähr 1,5A liefern. Wenn ich den Nennstrom als maximale Dauerbelastung interpretiere ist das eigentlich schon zu viel, real werden die 1,5A aber nur in gelegentlichen Peaks erreicht. An der Fräse verwende ich aber 2,5A ACT Schrittmotoren, diese bekomme ich nicht zum laufen. Ich verwende dieselbe Steuerung, nichts ist anders. Seit 2 Monaten hänge ich an diesem Problem ich weiß nichtmehr weiter und bin um jede Hilfe dankbar. Im Anhang findet ihr ein Protokoll zu allen durchgeführten Schritten im Detail. Ich hoffe auf einen guten Rat, Grüße, Max
Noch zur Info: Das verwendete shield findet man hier: https://www.elecrow.com/arduino-cnc-shield-v3-51-grbl-v0-9-compatible-uses-pololu-drivers.html
Meine Vermutung: falsche Adern genutzt. Finde die Paare beider Spulen raus und schließe sie jeweils an B1 + B2 und das andere Paar an A1 + A2
Max schrieb: > Wenn ich den Nennstrom als maximale > Dauerbelastung interpretiere ist das eigentlich schon zu viel, real > werden die 1,5A aber nur in gelegentlichen Peaks erreicht. An der Fräse > verwende ich aber 2,5A ACT Schrittmotoren, diese bekomme ich nicht zum > laufen. Eine Schrittmotorsteuerung mit Stromregelung kennt keine Peaks. Solange die Spannung für die Motoren hoch genug ist, wird der eingestellte Strom durchgedrückt. Bei hohen Schrittfrequenzen kann der Strom geringer sein, wenn die Gegeninduktion zu hoch für die verfügbare Spannung ist. Dann bricht das Drehmoment ein.
Max schrieb: > Verwendet wurden DRV8825 Treiber auf 0,7V Referenzspannung. Das müsste > ungefähr 1,5A liefern. Wenn ich den Nennstrom als maximale > Dauerbelastung interpretiere ist das eigentlich schon zu viel, real > werden die 1,5A aber nur in gelegentlichen Peaks erreicht. An der Fräse > verwende ich aber 2,5A ACT Schrittmotoren, Schrittmotoren bekommen immer den Strom, den man am Schrittmotortreiber einstellt. Aber der Schrittmotortreiber nennt den peak-Strom, der Motor hingegen wird mit rms-Strom bezeichnet. Dank Sinus ist peak=1.414*rms. Deine 1.5A passten also zum 1A Motor, er brachte volle Leistung und wurde 10% zu heiss. Was nun mit deinen Protoneer und ACT Motoren ist, wissen wir auch nicht. Zu magere Beschreibung.
Danke für die Antwort. Dann werden die Motoren ja wohl kaum das Problem sein. Irgendwo zwischen shield und Motoren muss aber das Problem liegen. Wie im angehängten PDF zu sehen, konnte ich die 1A Schrittmotoren mit der Steuerung betreiben, das ist das verwirrende. Falls es zur Aufkrung hilft: Als ich die 2,5A Motoren das erste Mal angeschlossen habe, kam ein minimales Signal an. Man hat ein „Surren“ gehört, circa 1s lang- wie wenn eine Welle schnell anläuft und dann wieder abbremst. Die Motorachse hat aber nicht gedreht. Bei den nächsten Versuchen ging nichts mehr. Und das obwohl die gleichen Treiber heute im Test mit den 1A Motoren funktionierten. Ich komme einfach nicht dahinter, wo das Problem sonst liegen kann. Bitte entschuldige diese rein qualitative Beschreibung- ich habe nur ein Multimeter zur Hand.
@tnn85: Das kann ich nicht beeinflussen. Die Motortreiber haben auf dem shield einen festen Steckplatz. Am shield sind die Motoren dann direkt angeschlossen.
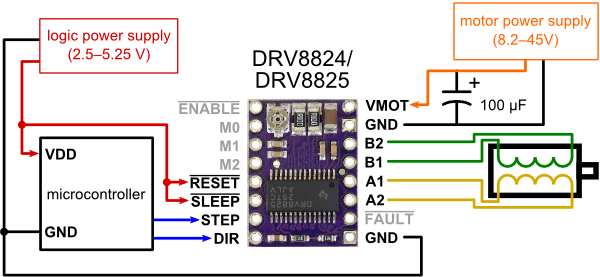
Max schrieb: > Das kann ich nicht beeinflussen. Die Motortreiber haben auf dem shield > einen festen Steckplatz. Am shield sind die Motoren dann direkt > angeschlossen. Doch kannst du. Du kannst die einzelnen Adern des Motor so nebeneinander in den Dupont-Stecker stecken, dass die Adern von jeweils einer Spule nebeneinander liegen. Das kannst du mit dem Multimeter überprüfen (Widerstandsmessung). Die Spulen erkennst du an dem geringen Widerstand (ca. 1-3 Ohm). Mess das mal ob das passt. Vergleiche dieses Bild: https://a.pololu-files.com/picture/0J4232.600.png Grün ist eine Spule, Gelb die andere. Wenn ein Geräusch aus dem Motor kommt, er sich aber nicht bewegt, dann deutet das erstmal darauf hin, dass zumindest eine Spule keinen durchgehenden Kontakt bis zum Treiber hat.
{kind=link}
Hallo! Ich habe ein anderes Problem. Meine Steuerung funktioniert, aber meine Anwendung verwendet lange Ruhepausen (10-30 Min) wenn der Motor nur steht. Leider der Modul mit A4988 hat keine (Standby) Möglichkeit den Ruhestrom zu senken. Ich habe eine Schaltung entwickelt, die in der Pausen den Motorstrom abschaltet. Das ist auch nicht gut, denn ich verliere Schritte. Gibt es dazu irgendeine spezielle Technik, die Motoren nicht zu heizen wenn sie stehen (Z.B. Die Z Achse in 3 D Drucker)? Wie behandelt man die Pausen in diesen einfachen Steuerungen ( in meine CNC Maschine - keine Eigenbau - der Motorstrom sinkt wenn der Motor steht, aber dort sind ganz andere Treibermodule (5A)). Vielen Dank! Eugen
Eugen T. schrieb: > Ich habe ein anderes Problem. Dann mach bitte einen anderen, neuen Thread auf. Du kannst dort dann den Thread hier verlinken, wenn er für dein Problem brauchbare und sinnvolle Informationen enthält.
Danke, bitte meinen Beitrag löschen, ich habe schon einen neuen Thread geöffnet.
Hallo Max, ich hatte an meiner Shapeoko anfangs auch das Protoneer Board verwendet. Ich musste die Reihenfolge der Spulenpins auch anpassen. Wenn diese nicht stimmt, kommt es zu beschriebenem Verhalten. Die eine Spule will einen Schritt links herum machen die andere rechts herum. Der Motor summt dann nur noch und dreht sogesehen zwischen 2 Schritten hin und her. Es reicht also nicht nur die Spulenanschlüsse zu finden, sie müssen auch richtig gepolt angeschlossen werden. MfG EGS
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.