Hi! Ich suche um ein (Dreh-)Ventil zu steuern einen kleinen Antrieb. Anwendung ist der Lockout einer (MTB-)Federgabel. Verstellweg: ca. 45 Grad Drehmoment: leider (noch) unbekannt Verstellszeit: 2s sind noch akzeptabel Bauraum: Zylinder mit 23.3mm Durchmesser, 16mm Höhe. In der Mitte eine Achse von 6mm Durchmesser (nicht entfernbar) Angedachte Lösungen: - DC Getriebemotor (ggf. mit Planetenvorsatz) mit Ritzel/Rahnrad auf vorhandene Welle - leider mit 6mm Durchmesser eher Spielzeug und Getriebe von niedriger Quali, 10mm Motoren zu groß, 8mm Motoren mit Getriebevorsatz gibts quasi nicht - Vielpoliger Brushless Motor als Innenläufer, untersetzt durch Harmonic Drive oder Cycloid Getriebe - unklar ob erforderliche Übersetzung realisierbar und ob der Motor so irgendwo zu bekommen/adaptierbar ist - Limited Angle Torque Motor (LATM), ähnlich dem ANtrieb von Festplattenarmen etc. - eigentlich schönste Lösung, ggf. sogar selber herzustellen, aber unsicher ob erforderliches Drehmoment erreicht werden kann bzw. wie die Auslegung zu erfolgen hat. Habt ihr dazu Ideen?
Wie siehts aus mit Modellbau-Servos? Billig und einfach mit PPM anzusteuern. Drehwinkel und - geschwindigkeit scheinen zu stimmen.
Robert B. schrieb: > Habt ihr dazu Ideen Ohne Drehmoment nutzlos. Ausserdem scheitert es nicht am Bauraum (in meiner Canon Ixus Kamera stecken 2 Motoren im Objektiv, die sind so winzig, die sieht man kaum) sondern an dem was du mechanisch hinbekommst und bezahlen willst. Schaffe also mehr Platz (Motor aussen, greift durch Schlitz im Gehäuse auf Zahnrad an Achse, der 20mm Bauraum reicht gerade für das Zahnrad und dessen Befestigung), und plötzlich gibt es Lösungen auch für dich.
So, muss mich ein wenig korrigieren: Drehwinkel: 120 Grad Drehmoment: 8-12g/10cm -> rund 8-12mNm
Robert B. schrieb: > Drehwinkel: 120 Grad > Drehmoment: 8-12g/10cm -> rund 8-12mNm Mit Bastler-Mitteln wirst du versuchen müssen den Servo raus zu legen, als aufsteckbaren Zusatz. Alles dort rein zu bauen wird sehr schwer. MG90S-Metal-Gear-High-Speed-Micro-Servo-9g https://www.ebay.de/itm/174334216963 Produkt-Modell: MG90S Produktgröße: 22,8 x 12,2 x 28,5 mm Nettogewicht: 13.6g Torsionsmoment: 2kg / cm Reaktionsgeschwindigkeit: 0,11 Sekunden / 60 Grad (4.8V) Betriebstemperatur: 0-55 ℃ Die Totzone Einstellung: 5 Mikrosekunden Stecker Typ: JR, FUTABA Allgemeines Betriebsspannung: 4,8V Strukturelles Material: Aluminiummetallzähne, kernloser Motor, Doppelkugellager Linienlänge: 300 MM Drehwinkel: 180 Grad
Robert B. schrieb: > Habt ihr dazu Ideen? Ich würde da an deiner Stelle mal in einem Forum fragen, wo es nicht primär um Fragen rund um Mikrocontroller und sonstige digitale Elektronik geht. Dein Thema scheint doch eher in den Bereich Mechanik zu passen.
Angehängte Dateien:

Bei der Ladesystemtechnik gibt es unter der Artikelnummer 20032110 für 34 Euro einen Aktuator. Den könnte man evtl. anpassen. Anschlußkabel für etwa 7 Euro nicht vergessen. https://www.ladesystemtechnik.de/ratio-welt/typ-2-steckdose-mit-verriegelung-129?c=20
Angehängte Dateien:
-

femm.png
52 KB
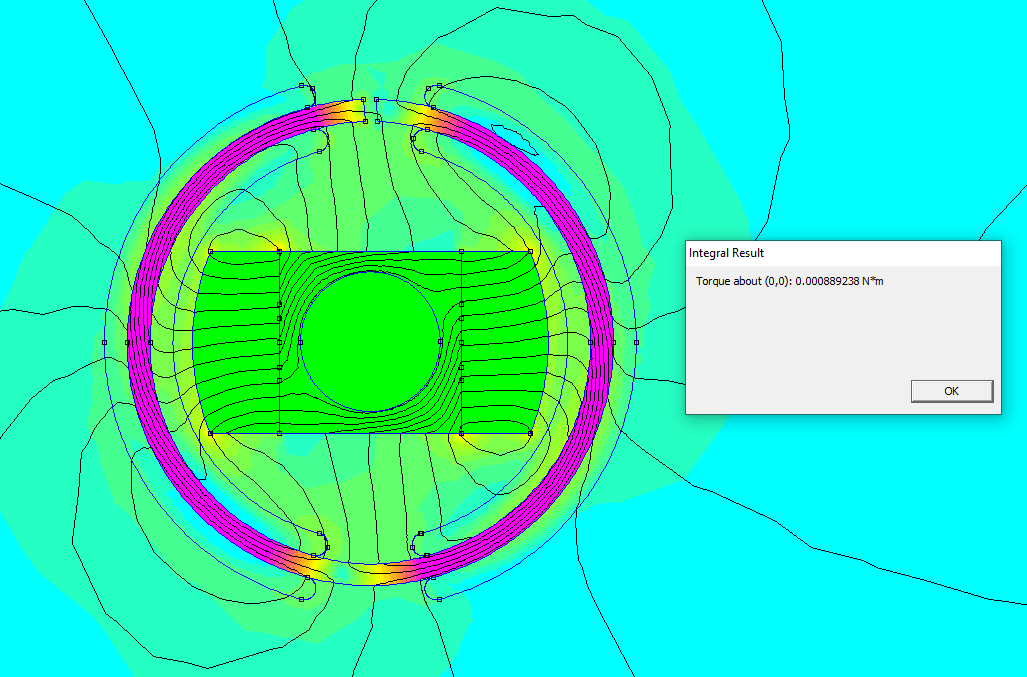
Hallo! Danke für die Anregungen. Der Verriegelungsaktuator passt größentechnisch gar nicht, der Servo bzw. auch andere Ansätze basierend auf Mikromotoren (ggf. mit Planetenvorsatz) wären meine zweite Wahl. Favorit wäre wie gesagt der LATM, da er zumindest mechanisch am einfachsten und robustesten sein sollte, ohne Positionssensorik auskäme (den übersetzten Motor immer in den Endanschlag laufen zu lassen und dann per Überstrom abzuschalten fände ich unglücklich) und auch ein verstellen per Hand erlauben würde (bei den hoch übersetzten Getrieben würde das sicher Bruch geben wenn diese rückwärts angetrieben würden). Ich habe also mal mit dem Magnetfeld-Solver FEMM (http://www.femm.info) losgelegt. Mit Fusion 360 die Abmaße als dxf, dann als planares Problem in FEMM. Tutorial (der Typ flucht wie ein Irrer aber das Tutorial hat alles was es braucht!): https://www.youtube.com/watch?v=2PxzNZb30o0 https://www.youtube.com/watch?v=NZwE-aQRcsw Leider erhalte ich trotz 1000 Windungen 0,125mm Kupferdraht, 1A (ergibt schon unglaubliche 29W!), 10mm Aktorhöhe und N55 Magneten nur 0.8mNm... Da fehlt noch Faktor 10. Evtl. könnte ich die Toleranzen verringern bzw. die Bauteile näher zusammen bringen - aber ob das Faktor 10 rettet... Vielleicht mache ich auch was falsch... Anbei ein Screenshot und die FEMM Dateien... Vielleicht mag wer vom Fach draufschauen.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.