Hallo zusammen,
aktuell befinde ich mich in der Phase der Ideenfindung für die schnelle
Positionierung eines Filterrades für einen optischen Aufbau.
Verschiedene optische Filter (auch Durchgang und Geschlossen) müssen in
einen konvergenten Strahlengang ein- und ausgeschwenkt werden können.
Dabei muss besonders zwischen zwei Positionen ein Wechsel in ca. 50-80
ms erfolgen können. Es gibt leider nur sehr wenig Bauraum, sodass viele
Varianten bereits von vorne herein ausscheiden.
Ich habe bereits eine Implementierung bei der ein Filterrad sich um eine
Achse die orthogonal auf dem Strahlengang steht dreht. Dabei muss ca.
100° zwischen den beiden schnell anzufahrenden Positionen bewegt werden.
Das Filterrad sitzt direkt auf der Achse des Schrittmotors. Ich erreiche
die benötigte Verfahrzeit und kann durch Tuning der Motorparameter auch
nachschwingen fast auf 0 reduzieren. Allderings: Der Einbau ist zum
K**** das kann so nicht bleiben.
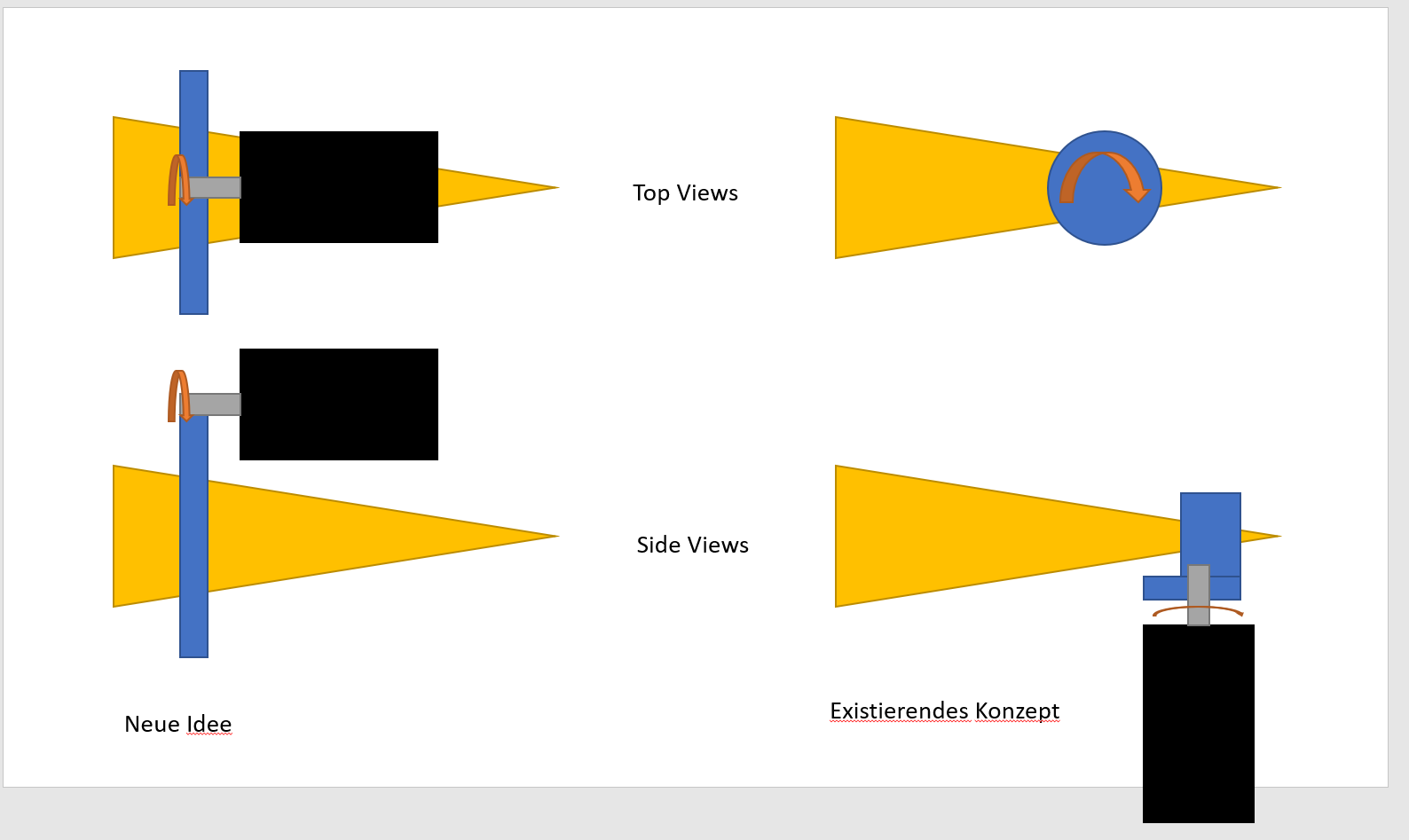
Deshalb folgende Idee:
Großes Kunststofffilterrad mit Achse parallel zur optischen Achse.
Dadurch ist genaues erreichen der Endposition und Vibration am Fahrtende
egal,da diese Bewegungen in einer ebene Orthogonal zum Strahlengang
passieren. Ich müsste ca. 90° zwischen den beiden schnell anzufahrenden
Positionen verfahren.
Das Kunststoffilterrad würde nicht über die Achse sondern über eine
Außenverzahnung angetrieben. Z.B. 1:1 oder 2:1 übersetzt.
Ich bin am überlegen ob ein Schrittmotor hier die richtige Lösung ist
oder ob man damit immer bei der Dynamik im Nachteil ist. Ich hatte
damals einen Schrittmotor ausgesucht, da die Lebensdauer im Bereich von
>2 Jahre Dauerbetrieb liegen muss.
Vielleicht hat ja noch jemand eine Idee wie man das elegant mit hoher
Dynamik lösen könnte.
Angehängte Dateien:
Christoph K. schrieb: > Es gibt leider nur sehr wenig Bauraum Der Ingenieur sagt: Mehr Bauraum schaffen und die optimale Lösung wählen. Form follows Function. Festplatten-Voicecoil-Kopfantriebe sind z.B. schnell. Man kann natürlich auch miniaturisierte Linearmotoren konstruieren und bauen, wenn jemand bereit ist es zu bezahlen, aber da hapert es bei den sich alles Wünschenden meistens.
Wenn es 4 Positionen wären könnte man vieleicht ein Malteserkreuzgetriebe bauen. Siehe https://de.wikipedia.org/wiki/Malteserkreuzgetriebe Dann müsste man den Antriebsmotor nicht exakt positionieren, sondern nur nach ungefähr einer, zwei oder drei Umdrehungen wieder anhalten. Ansonsten klingt das nach einem Servoantrieb. Ob der jetzt einen BLDC oder Bürsten-DC Motor hat ist erst mal zweitrangig. Dazu brauchst du eine Positionserfassung der Scheibe (Istwert), eine Servoregelung, den Motortreiber und den Motor.
MaWin schrieb: > Der Ingenieur sagt: Mehr Bauraum schaffen und die optimale Lösung > wählen. Form follows Function. Bei dieser Sichtweise wären Mobiltelefone immer noch so groß wie damals die A- und B-Netz-Telefone, d.h. die würden den halben Kofferraum eines Autos belegen. Es gäbe hinreichend viele HF-Techniker, die einem erklären, warum ein schuhkartongroßes XYZ-Filter wesentlich bessere Eigenschaften als die mittlerweile gebräuchlicheren Ausführung hätte und man darauf auch nicht verzichten könne. Es schadet also nicht, wenn die Industriedesigner gelegentlich den Ingenieuren etwas Dampf unter dem Hintern machen.
> Bei dieser Sichtweise wären Mobiltelefone immer noch so groß
Mit einem Motorola International 3200 konnte man auch im Wald
noch telefonieren. Mit einem winzig Siemensteil (immerhin mit
ausziehbarer Antenne) tat sich da gar nichts.
Andreas S. schrieb: > Es schadet also nicht, wenn die Industriedesigner gelegentlich den > Ingenieuren etwas Dampf unter dem Hintern machen. Wenn Lebensdauer praktisch egal ist, dann mag das sein. Welches moderne Smartphone inkl. beweglicher Bauteile hält 2 Jahre Dauerbetrieb durch? Keines.
MaWin schrieb: > Der Ingenieur sagt: Mehr Bauraum schaffen und die optimale Lösung > wählen. Form follows Function. Das ist nur die halbe Wahrheit und sagt sich immer so leicht daher. In der Realität gibt es eben noch mehr Randbedingungen die den zur Verfügung stehenden Bauraum diktieren. In diesem Fall sind es Brennweiten und Streulichtunterdrückung. Udo S. schrieb: > Ansonsten klingt das nach einem Servoantrieb. > Ob der jetzt einen BLDC oder Bürsten-DC Motor hat ist erst mal > zweitrangig. > Dazu brauchst du eine Positionserfassung der Scheibe (Istwert), eine > Servoregelung, den Motortreiber und den Motor. Durch die Änderung der Anordnung ist eine Positionierung nur auf ca. 5° genau erforderlich. Man könnte also die Position mit dem Schrittmotor locker durch zählen und mit anderen Motortechnologien durch Gabellichtschranken oder einen Hallsensor erreichen. Ich denke ich brauche hier kein Closed-Loop. Ich glaube das wichtige wäre, und da bräuchte ich eure Hilfe, einen Antrieb zu haben der das Rad schnell beschleunigt und wieder abbremst, sodass ich die 90° in 50...80ms schaffe. Mit der Randbedingung großer Lebensdauer, sodass ein Bürstenmotor vermutlich ausscheidet? Eigentlich war ich der Meinung, dass 90°/50ms -> 5U/s = 300 U/min für einen Stepper noch zu schaffen sein sollten. Weiters hätte ich dann geschaut, dass das Drehmoment bei V=0 Groß genug ist um das Trägheitsmoment zu beschleunigen, dann könnte ich auf eine Rampe verzichten. Wobei auch diese Denkbar wäre. Was mir schwer fällt ist den Wirkungsgrad der Übersetzung zu schätzen.
was schrieb: > Welches moderne Smartphone inkl. beweglicher Bauteile hält 2 Jahre > Dauerbetrieb durch? > Keines. Die Behauptung ist schlichtweg Quatsch. Ich hab mein Xperia nach 6 Jahren in der Ruhestand geschickt. Die Dinger halten schon wenn man sie nicht gerade jeden Tag durch die Gegend schmeißt oder sich drauf setzt weil man das Ding in der A...tasche trägt. Im übrigen hatte ich das Xperia täglich in Gebrauch.
Hallo Christoph, wie groß ist denn der Strahl? Eventuell ein Hubmagnet? Mit so angetriebenen Shuttern (Verschlussvorhangprinzip) hatte ich schon zu tun, der war schnell (und ist ordentlich gegen den Anschlag geklonkt), aber ich weiß nicht wie schnell, das war kein Kriterium bei uns. Auf jeden Fall sollte die bewegte Masse so gering wie Möglich sein. Vielleicht kann man den Verschluss aus einer SLR Kamera recyceln, die sollen angeblich so 100000 Öffnungsvorgänge halten. Gibt es ein festes Strahl an-aus Tastverhältnis? Dann würde ich über ein ständig rotierendes Chopperrad mit entsprechender Geometrie nachdenken, Antrieb mit Servo- oder Steppermotor, erspart das Anfahren und Bremsen.
Angehängte Dateien:
-

Galvo.png
3,5 KB
Christoph K. schrieb: > Eigentlich > war ich der Meinung, dass 90°/50ms -> 5U/s = 300 U/min für einen Stepper > noch zu schaffen sein sollten. Weiters hätte ich dann geschaut, dass das > Drehmoment bei V=0 Groß genug ist um das Trägheitsmoment zu > beschleunigen, dann könnte ich auf eine Rampe verzichten. Ich denke, mit einem Schrittmotor passt das schon. Da du aber nur geringen Bauraum hast muss der möglichst klein sein. Das wiederum impliziert, dass du auf die Rampen eher nicht verzichten kannst. (weil sonst das Drehmoment nicht ausreicht) Es gibt aber mittlerweile verschiedene Treiber, die auch mehr als nur eine Lineare Rampe bauen. Bei fixen Positionen kann man sicher auch mit einem Controller und entsprechender Lookup table arbeiten. Ich hab das hier in der Firma bei einem Galvo mal gemacht. Die Originalschaltung schaltete hart zwischen 3 Spannungswerten (+, 0 -) um. Wir brauchten aber 4 Positionen bei höherer Geschwindigkeit und gleichzeitig weniger Wärmeentwicklung. Ich hab das Biest dann mittels Sinusförmiger Änderung der Werte angesteuert. Effekt: alle 3 Vorgaben wurden erfüllt. Da die harten Start und Bremsmanöver wegfielen wurde die Erwärmung stark reduziert und gleichzeitig wurde das Teil deutlich schneller (mehr als 3 mal so schnell). Die Anzahl der anzufahrenden Positionen ist nun nahezu beliebig Skalierbar. Man brauch halt dann nur eine Lookup table im Excel berechnen, die dem Controller gegeben wird. Der fährt die dann Punkt für Punkt ab. Du brauchst also nur einen Timer dafür und je nachdem, wieviele Stützstellen du brauchst entsprechend viel (oder wenig) Speicher. Ich hab den Speicherbedarf noch reduziert, da ich nur einen Quadranten gespeichert habe. Der Rest wird durch Drehen und Spiegeln dieses Quadranten erreicht. Multipliziert mit dem jeweiligen Offset der Positionen geht das sehr schnell und doch Platzsparend mit relativ hoher Auflösung. p.s.: orange ist der Vorgabewert, welchen der Controller über DAC ausgibt und grün ist die Position, die der Galvo hat. man sieht, dass dieser zwar zeitlich mit einem Offset, aber ohne Überschwingen folgt (wichtig, damit das schnell wird).
Christoph K. schrieb: > Durch die Änderung der Anordnung ist eine Positionierung nur auf ca. 5° > genau erforderlich. Man könnte also die Position mit dem Schrittmotor > locker durch zählen und mit anderen Motortechnologien durch > Gabellichtschranken oder einen Hallsensor erreichen. Ich denke ich > brauche hier kein Closed-Loop. Das klingt für mich irgendwie nach: "Ich will das mit einem Schrittmotor machen und warte darauf, bis jemand sagt mach das so". Wenn du es so machen willst dann mach es. Mit einem Schrittmotor kannst du Schritte zählen wenn du dir sicher bist dass keine verloren gehen. Warum haben Servoantriebe keine Schrittmotoren? Richtig, weil ein DC, BLDC oder Drehstrommotor bei gleicher Größe mehr Leistung hat also eine gegebene Last schneller positionieren kann. Und warum haben die dann eine Regelung? Richtig, weil ohne Schritte zählen man den Istwert erfassen und regeln muss. Und man damit genau positionieren kann, bis hin zur Leistungsgrenze. Dass ein DC Motor nicht lange hält ist eine Mär. Wie oft soll denn der Motor am Tag stellen? Wir hatten früher DC-Motore in Kartenlesern von Geldautomaten. Die haben Jahre gehalten und die Automaten standen an Flughäfen und Bahnhöfen, waren also stark frequentiert. Man sollte halt mal bei Herstellern wie Maxon oder Faulhaber schauen. Die können dir auch was über die Lebensdauer sagen. Ausserdem hatte ich oben geschrieben, dass du auch einen BLDC Motor samt passendem Motortreiber nehmen könntest. Aber ich bin nur Laie und habe selber nicht viel mit Motoren gemacht, vieleicht kommen boch bessere Tipps von den Profis.
Angehängte Dateien:
-

NMB_T16701-01.png
12 KB
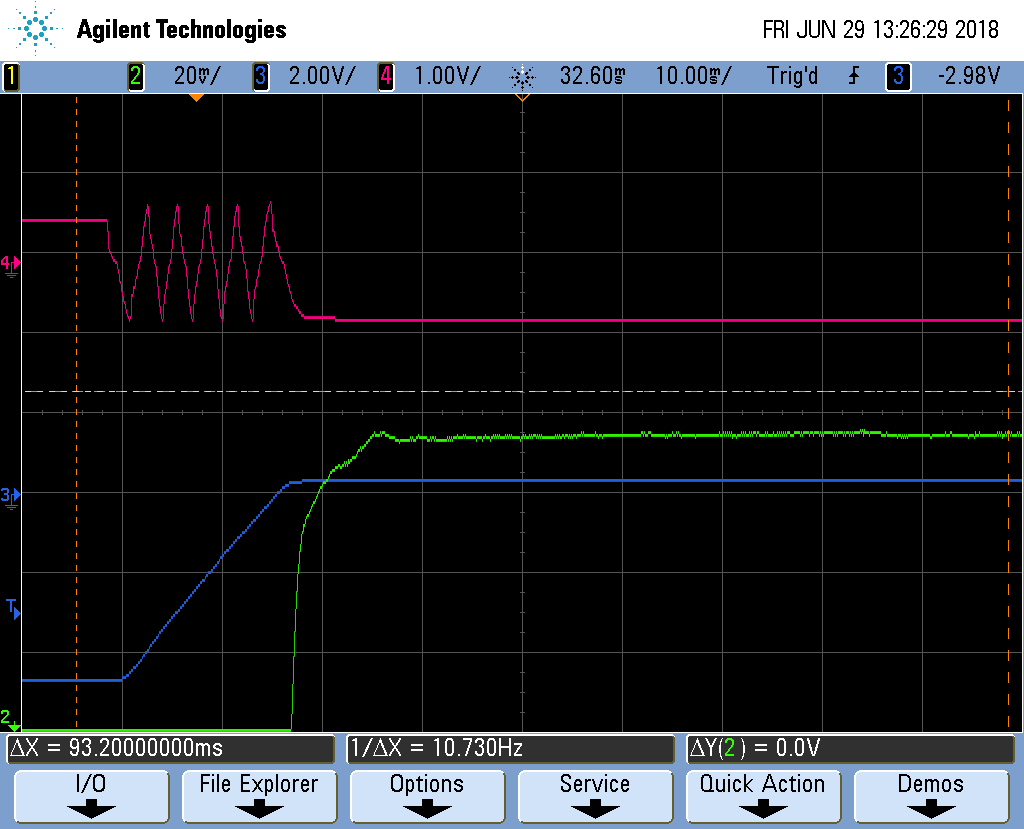
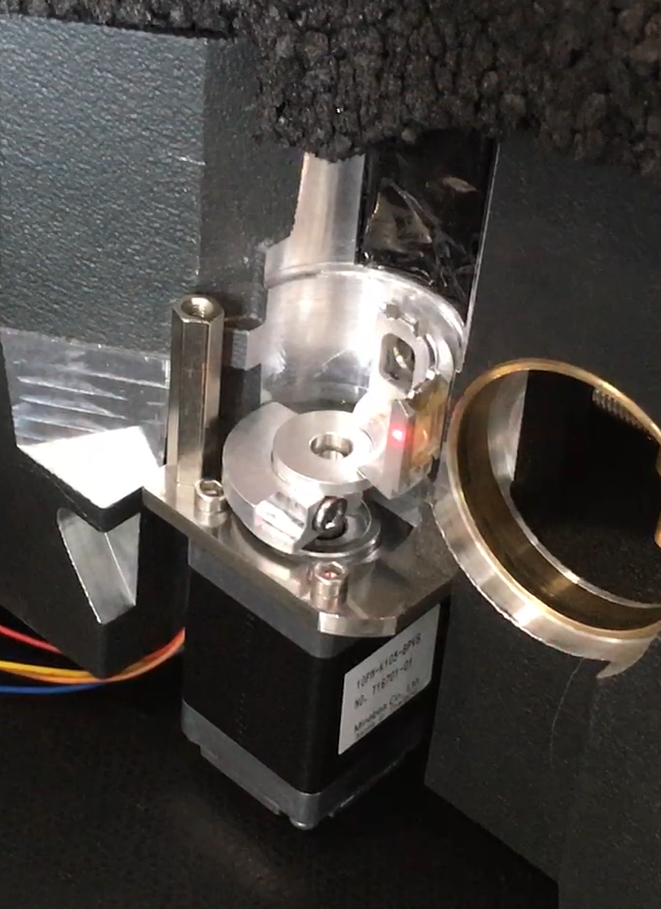
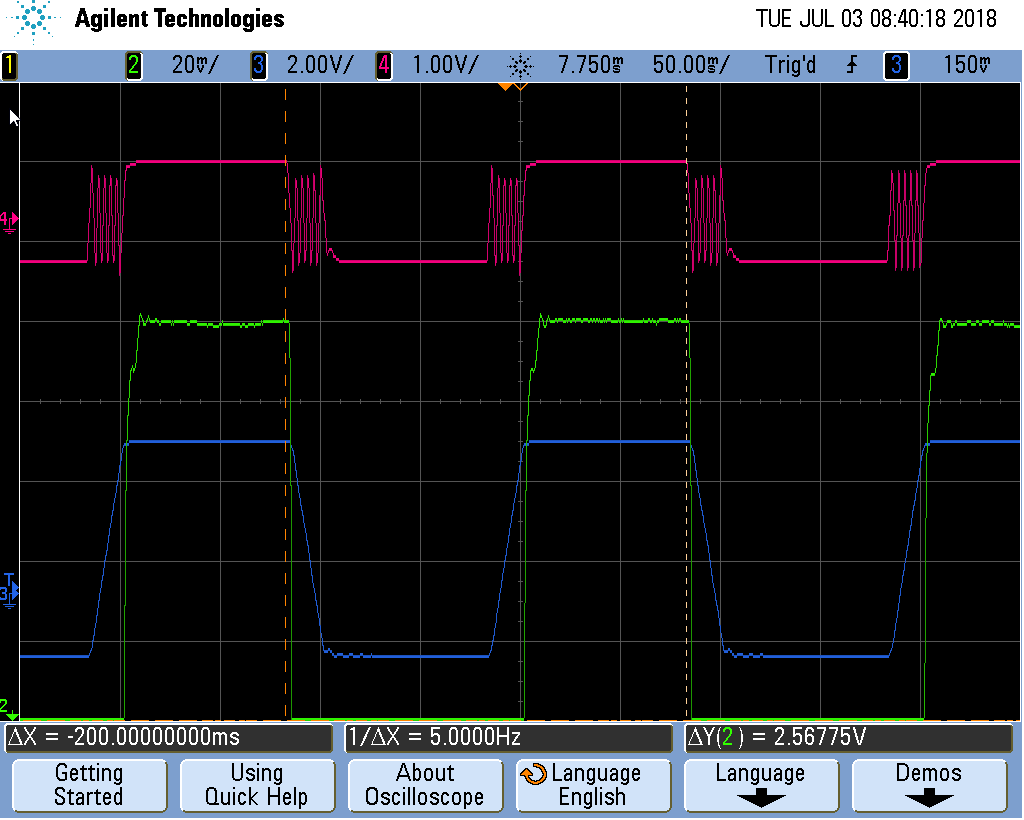
Danke für deinen Beitrag Christian. Ich habe anbei mal ein Bild meiner Lösung. Das ist allerdings eben die Variante mit dem Direktantrieb die ich nicht verwenden möchte. Da ist das Filterrad quasi mit der Achse orthogonal zum Strahl was einige Nachteile optischer Natur und beim Einbau hat. Rot: Current Waveform Blau: Gesamtfahrweg mit Lasertriangulation gemessen Grün: Ende des Fahrwegs, Lasertriangulation mit sehr hoher Auflösung (selbes Signal wie blau, andere Skalierung) Es klappt also super. Ich kann den Stepper über den FPGA mit beliebigen Rampen etc versorgen. Ich habe quasi keine Schwingung bei Erreichen der Position trotz open loop. Ich würde das jetzt allerdings gerne eben über eine Übersetzung auf ein außen verzahntes Filterrad machen. Da fehlt mir ein bisschen der Überblick. Grüße
An den TO: Falls ich es nicht übersehen habe, schreibst Du nichts zu den Abmessungen der ganzen Dinge und dazu, welche Massen da bewegt werden müssen. Das ist bei der geforderten Geschwindigkeit ja nicht ganz unwichtig.
Naja, dann kommt halt noch das Übersetzungsverhältnis und das Umkehrspiel mit hinzu, was ausgeglichen oder zumindest beachtet werden sollte. Ansonsten sehe ich da keine großen Ansteuerprobleme, erst recht nicht, wenn es jetzt schon funktioniert. Der Rest ist dann halt Mechanik.
Udo S. schrieb: > Dass ein DC Motor nicht lange hält ist eine Mär. Wie oft soll denn der > Motor am Tag stellen? Wir hatten früher DC-Motore in Kartenlesern von > Geldautomaten. Die haben Jahre gehalten und die Automaten standen an > Flughäfen und Bahnhöfen, waren also stark frequentiert. Man sollte halt > mal bei Herstellern wie Maxon oder Faulhaber schauen. Die können dir > auch was über die Lebensdauer sagen. > Ausserdem hatte ich oben geschrieben, dass du auch einen BLDC Motor samt > passendem Motortreiber nehmen könntest. Je nach Messung kann es Vorkommen, dass das Filterrad mit 10Hz im Dauerbetrieb läuft. Und das über Jahre. Ich sage nicht, dass ein Schrittmotor ein muss ist. Aber aus Aufwands und Kostengründen möchte ich den Closed Loop weg nur gehen wenn es anders nicht geht. Und das es Open Loop geht habe ich ja schon gezeigt. Ich möchte jetzt nur auf das Getriebe umstellen.
Christoph K. schrieb: > Ich möchte jetzt nur auf das Getriebe umstellen. Ok, bei einem 2:1 Getriebe kannst du bei Zahnrädern soweit ich weiss von einem Wirkungsgrad 0,8 bis 0,9 ausgehen. Kommt halt auch auf das Material/Materialpaarung an. Wenn das 2 Jahre ununterbrochen läuft dann ist allerdings ein DC Motor eher nicht empfehlenswert. Du solltest aber eine Möglichkeit vorsehen, zumindest an einer Stelle des Rads einen Referenzpunkt zu haben damit sich evt. Fehler im Zählen nicht irgendwann doch zu weit aufaddieren.
Udo S. schrieb: > Christoph K. schrieb: >> Ich möchte jetzt nur auf das Getriebe umstellen. > > Ok, bei einem 2:1 Getriebe kannst du bei Zahnrädern soweit ich weiss von > einem Wirkungsgrad 0,8 bis 0,9 ausgehen. Kommt halt auch auf das > Material/Materialpaarung an. > > Wenn das 2 Jahre ununterbrochen läuft dann ist allerdings ein DC Motor > eher nicht empfehlenswert. > Du solltest aber eine Möglichkeit vorsehen, zumindest an einer Stelle > des Rads einen Referenzpunkt zu haben damit sich evt. Fehler im Zählen > nicht irgendwann doch zu weit aufaddieren. Aktuell hatte ich PP geplant und ggf. ein Teflonritzel auf dem Stepper und ein Igus Gleitlager für des Filterrad.
Einen Referenzpunkt brauch man so oder so. Sonst weiß die Maschine ja am Anfang nicht, wo sie gerade steht. ob man den zwischendrin nochmal anfährt ist dann eine Frage der Angst bzw. der Sicherheit. Wir haben auch schon eine Hohlwelle mittels Schrittmotor gedreht. In dieser Hohlwelle ist ein optisches Element. Diese Hohlwelle wird mit einem Magnetencoder abgefragt und liefert einen aktuellen Positionswert, welcher sehr viel höher aufgelöst ist, als der Schrittmotor zu stellen vermag. Damit kann man sich aber das Nullpunkt suchen beim Einschalten sparen und die Einflüsse des Getriebes werden ebenfalls kompensiert. (Passende Sensorchips gibts bei ic-Haus)
Du solltest Dir vielleicht einmal die Closed-Loop-Schrittmotoren von Orientalmotor anschauen. Bei denen funktioniert das Nachregeln der Motorposition ganz ausgezeichnet. Sehr praktisch ist dabei auch, dass man mit dem Konfigurationsprogramm MEXE-02 sowohl an den Parametern herumschrauben als auch verschiedene Diagramme auslesen kann. Damit kann man auch sehr gut Vibrationen, Überschwinger usw. erkennen und dann ggf. die Steilheiten der jeweiligen Rampen anpassen. https://www.orientalmotor.de/Products/Stepper_motors/Closed_loop_stepper_motor_packages/
Christian B. schrieb: > Einen Referenzpunkt brauch man so oder so. Sonst weiß die Maschine ja am > Anfang nicht, wo sie gerade steht. ob man den zwischendrin nochmal > anfährt ist dann eine Frage der Angst bzw. der Sicherheit. Man kann ja immer wieder neu referenzieren wenn man an dem Punkt vorbeikommt.
Angehängte Dateien:
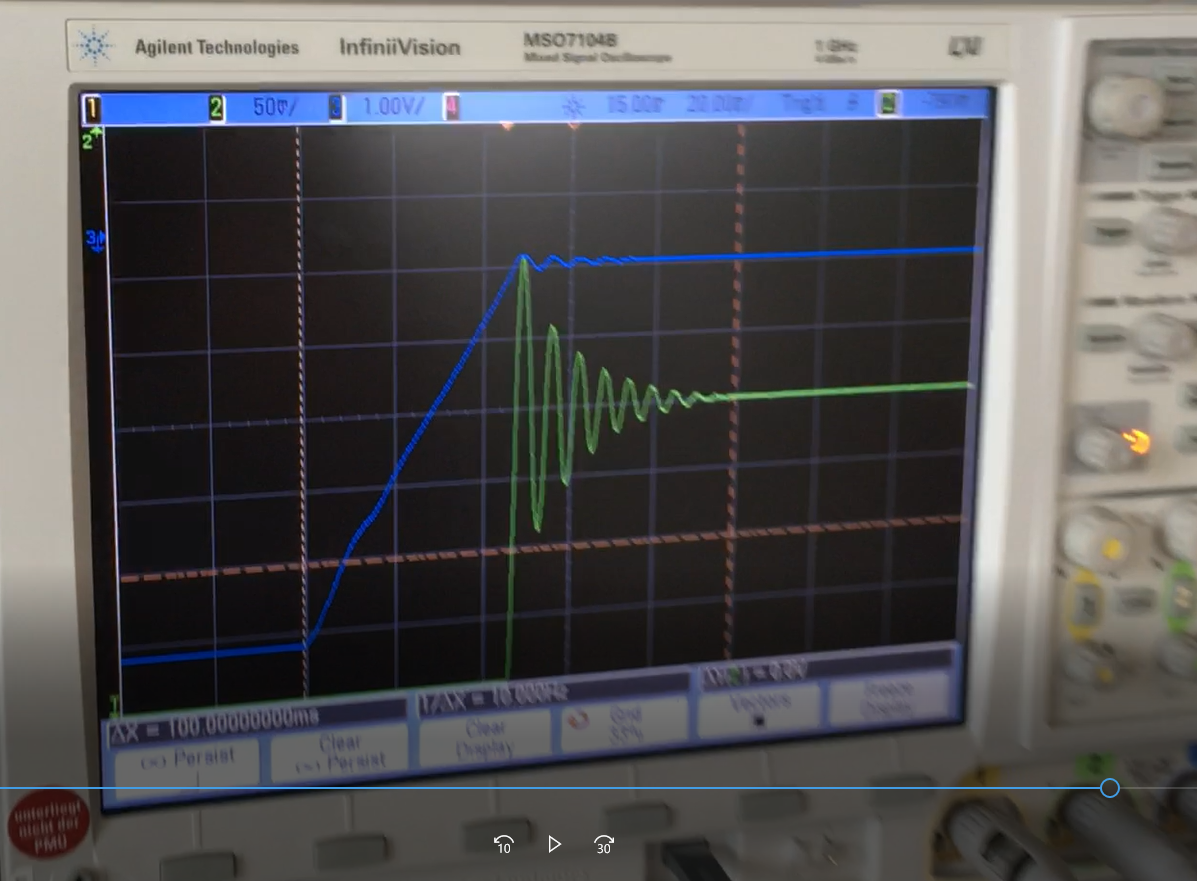
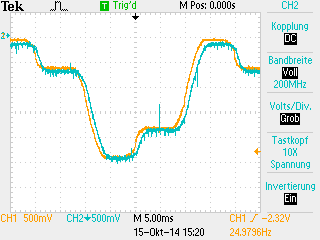
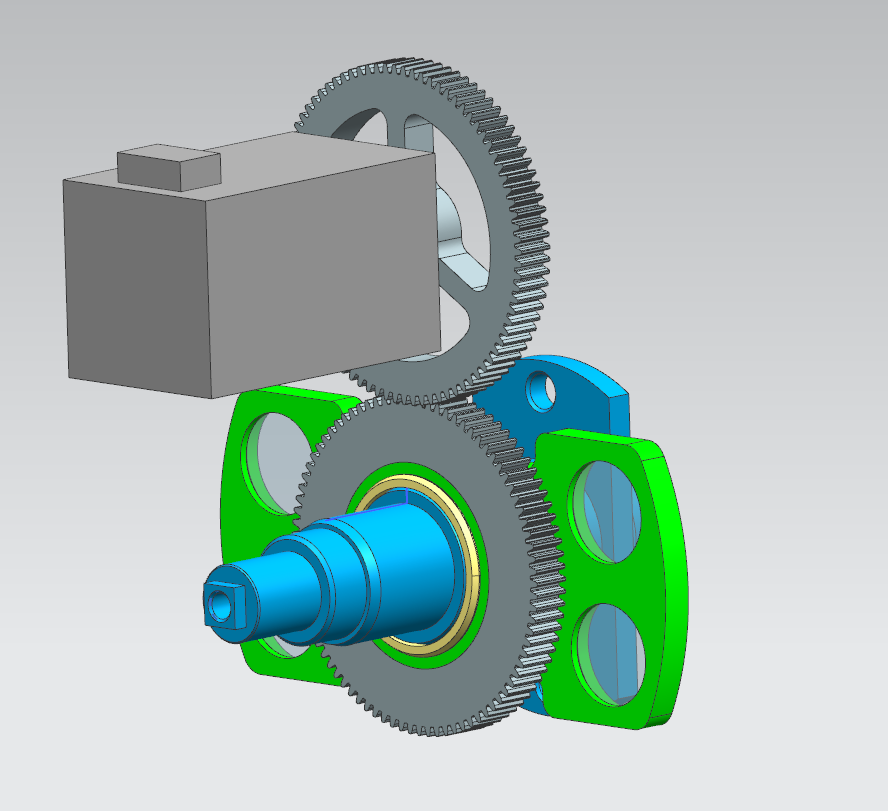
Anbei mal noch eine Überblick über die aktuelle Konstruktion. Ich hoffe dass sich das mit dem selben Motor auf die "Getriebelösung" umstellen lässt. Man sieht bei den beiden Oszi-Bildern schön wie viel das Tuning der Motorparameter bei der Resonanz im Erreichen der Position ausmacht.
Filterrad mit Gleichstrommotor (ggf BL wg Lebensdauer) rotieren lassen und über einen Markerimpuls bei den gewünschten Filtern den Sensor triggern?
Henrik V. schrieb: > Filterrad mit Gleichstrommotor (ggf BL wg Lebensdauer) rotieren lassen > und über einen Markerimpuls bei den gewünschten Filtern den Sensor > triggern? Ist eine nette Idee, wird in einem anderen Fall (Blitzlampe) auch so gemacht. Geht hier aber nicht. Der Wechsel ist zeitlich nicht konstant. Ich muss quasi mit 10Hz frei entscheiden können ob auf oder zu.
Angehängte Dateien:
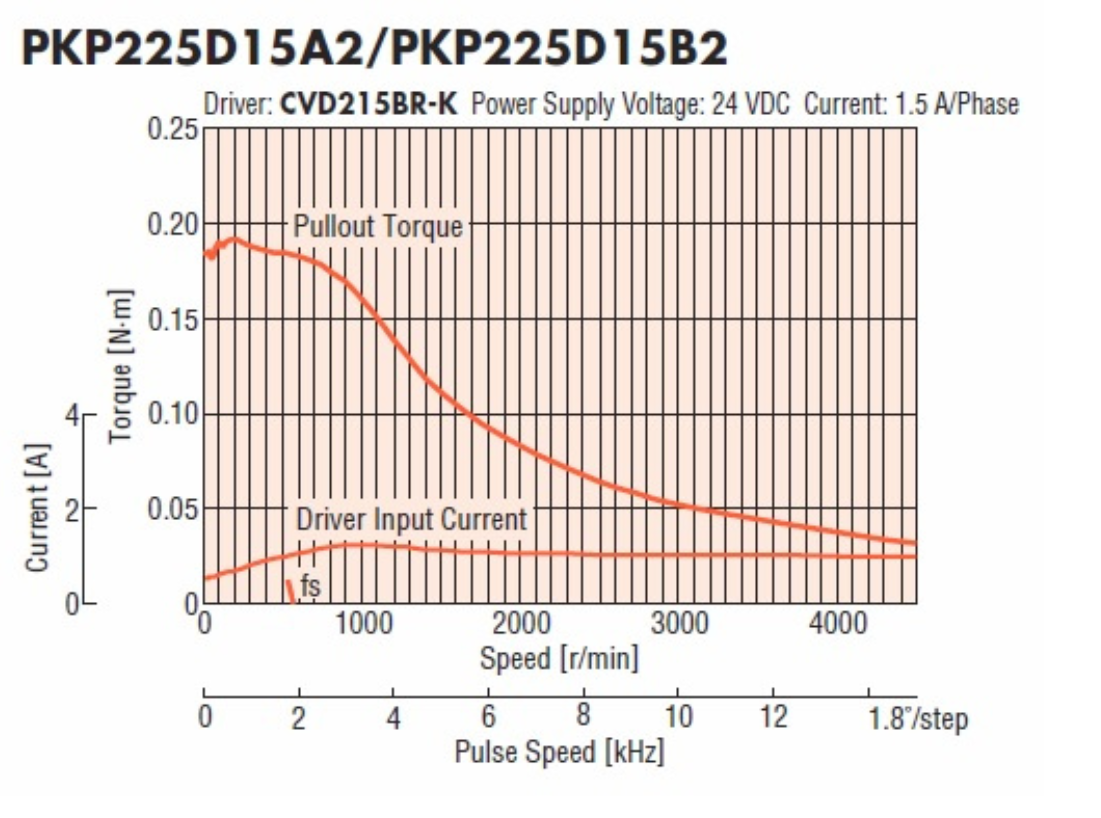
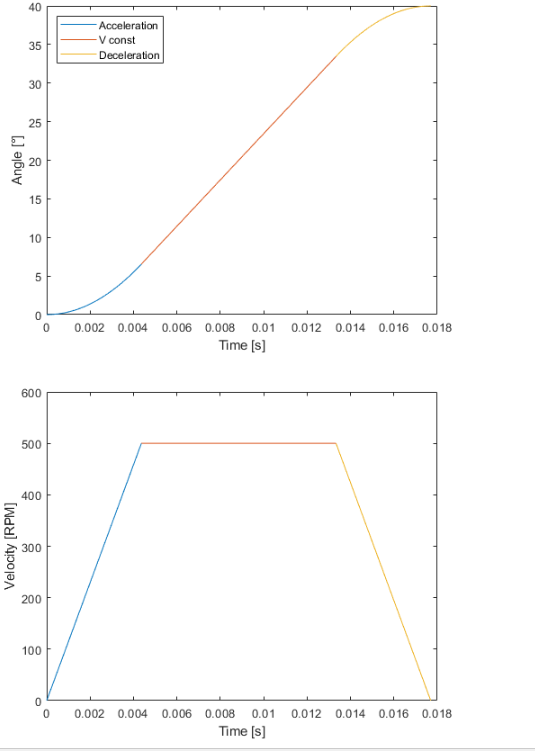
Hallo zusammen, ich habe mal ein kleines Update mit ein paar Fragen angereichert: Die Konstruktion sieht jetzt wie Folgt aus: *2 Pom-Zahnräder Modul 0.5 mit 84 Zähnen *Igus Gleitlager *Aluminium Filterrad Zusammen macht das ~1.417 kgm^2 Trägheitsmoment Der Motor kann laut Graph ca. 0.17 Nm von 0...500rpm -> ich setze Umax auf 500 rpm -> ich teile das maximale Drehmoment durch zwei um einen Worst-Case für Reibung / Getriebewirkungsgrad anzunehmen als Bewegungsprofil nehme ich ein Trapez an mit identischer Beschleunigungs und Bremsphase, dazwischen Uconst = Umax Ich beschleunige mit alpha = 0.5*M / Trägheitsmoment dabei erhalte ich folgendes Ergebnis (siehe Anhang). Ist das realistisch? Ich komme auf ca. 20ms .... Grüße und Danke
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.