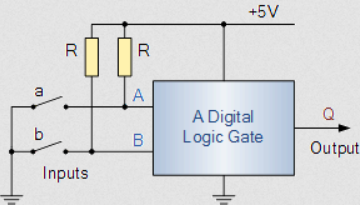
Hallo zusammen, könnt ihr mir bitte erläutern, ... 1) ... wozu ich den Pull-Down Widerstand am Pin OE (Output Enable) benötige? Nach meinem Verständnis dienen Pull-Up und Pull-Down Widerstände der ermeidung eines Kurzschlusses. Anhand des angehängten Bildes Pull_Up_Widerstand.png" (siehe https://www.electronics-tutorials.ws/de/logische/pullup-widerstaende.html) würde dieser auftreten, wenn die Schalter geschlossen werden. Schließe ich den Pin OE direkt an VCC oder GND an, entfällt somit die Notwendigkeit eines Pull-Down Widerstands. Dasselbe gilt, wenn ich den Pin mit Hilfe meines Arduino schalte, der über entsprechende interne Elektronik verfügt. Stimmt das so? 2) ... wie ich den Widerstand auf Basis der Angaben im Datenblatt dimensioniere? Nach meinem Verständnis schwankt die Spannung am Pin OE aufgrund von Ruheströmen im Chip. Angenommen, der OE-Pin soll dauerhaft LOW sein, so müsste der Widerstand derart dimensioniert werden, dass der Ruhestrom bei einer Spannung kleiner der maximalen LOW-Spannung V_IL (Low-level input voltage für OE, 6.3 Recommended Operating Conditions) noch abgeleitet wird. Als Basis würde ich den High impedance state output current I_OZ (6.5 Electrical Characteristics) nehmen. Stimmt das so? 3) ... ob sich das Spannungspegelwandler für SPI-Kommunikation eignet, welche Kenngrößen relevant sind und wie ich die maximale zulässige Übertragungsrate ermittele? Kann ich mich direkt an der Datenrate orientieren, die im Datenblatt angegeben wird: z.B. 60 Mbps (6.9 Timing Requirements: VCCA = 3.3 V ± 0.3 V) oder sind hier noch andere Aspekte zu berücksichtigen? Grüße Jonny
Angehängte Dateien:
-

Pull_Up_Widerstand.png
36 KB
Beitrag #6404113 wurde von einem Moderator gelöscht.
Johnson 3. schrieb: > Nach meinem Verständnis dienen Pull-Up und Pull-Down Widerstände der > ermeidung eines Kurzschlusses. Nö. Pullup oder Pulldown Widerstände ziehen eine Leitung bei Inaktivität auf einen definierten Pegel. Das hat nichts mit Kurzschluss zu tun. In deinem Fall wird OE auf low gezogen, solange der ansteuernde Controller noch keinen definierten Pegel liefert.
Pull Up/Down sind idr. da wenn man immer definierte Zustände will auch wenn beispielsweise der Treibende Pin im Reset State High-Z ist (z.B. µC) oder wenn man open drain/collector Ausgänge hat. Die können im ersten Fall hochohmig sein (10k oder mehr) oder müssen im zweiten Fall je nach Geschwindigkeit dimensioniert werden.
Ok, und warum lasse ich den Widerstand dann nicht weg und schließe direkt an VCC oder GND an?
Wirklich? was meinst du was dein open D/C pin oder dein Push Pull ausgang macht wenn du das machst? Richtig du schließt deine Versorgung kurz.......
Johnson 3. schrieb: > Ok, und warum lasse ich den Widerstand dann nicht weg und schließe > direkt an VCC oder GND an? Weil so ein Pin u.U. eine niederohmige Verbindung, je nach Schaltzustand, zu Vcc oder GND herstellen kann. Dann kann es ganz schön knallen wenn der Pin extern mit Vcc verbunden ist und interne nach GND schaltet ;)
Matthias S. schrieb: > Johnson 3. schrieb: >> Nach meinem Verständnis dienen Pull-Up und Pull-Down Widerstände der >> ermeidung eines Kurzschlusses. > > Nö. Pullup oder Pulldown Widerstände ziehen eine Leitung bei Inaktivität > auf einen definierten Pegel. Guest schrieb: > was meinst du was dein open D/C pin oder dein Push Pull ausgang macht > wenn du das machst? > > Richtig du schließt deine Versorgung kurz ... Also was nun? Bitte berücksichtigt auch die Fragen 2 und 3. Danke ;) Johnson 3. schrieb: > 2) ... wie ich den Widerstand auf Basis der Angaben im Datenblatt > dimensioniere? > > Nach meinem Verständnis schwankt die Spannung am Pin OE aufgrund von > Ruheströmen im Chip. Angenommen, der OE-Pin soll dauerhaft LOW sein, so > müsste der Widerstand derart dimensioniert werden, dass der Ruhestrom > bei einer Spannung kleiner der maximalen LOW-Spannung V_IL (Low-level > input voltage für OE, 6.3 Recommended Operating Conditions) noch > abgeleitet wird. Als Basis würde ich den High impedance state output > current I_OZ (6.5 Electrical Characteristics) nehmen. Stimmt das so? > > 3) ... ob sich das Spannungspegelwandler für SPI-Kommunikation eignet, > welche Kenngrößen relevant sind und wie ich die maximale zulässige > Übertragungsrate ermittele? > > Kann ich mich direkt an der Datenrate orientieren, die im Datenblatt > angegeben wird: z.B. 60 Mbps (6.9 Timing Requirements: VCCA = 3.3 V ± > 0.3 V) oder sind hier noch andere Aspekte zu berücksichtigen?
Weshalb dort ein Pulldown sein muss... Naja. Wenn dein controller noch nichts liefert. 1) Dein controller hat waehrend des Resets einen Tristate Output. 2) Dann gibt es einen Moment wenn der Controller noch nicht programmiert ist. Dann ist der Ausgang Tristate 3) Und dann gibt es auch noch die Programmierphase. Dann ist der Ausgang Tristate Alles klar. Einen Pulldown wuerde ich unbesehen zB 10k nehmen. Falls es um lowpower geht, das Datenblatt studieren, ob allenfalls auch 100k gehen.
Zu dem TXS0108E: Ich habe den schon mehrmals verwendet, auch für schnelles SPI. Ich hatte da weder Pullup noch Pulldown Widerstände an den Leitungen. Der Baustein ist recht pflegeleicht. Du kannst ja mal deine Schaltung hier hochladen, dann gucke ich sie mir an.
Angehängte Dateien:
-

TXS0108E.png
15 KB
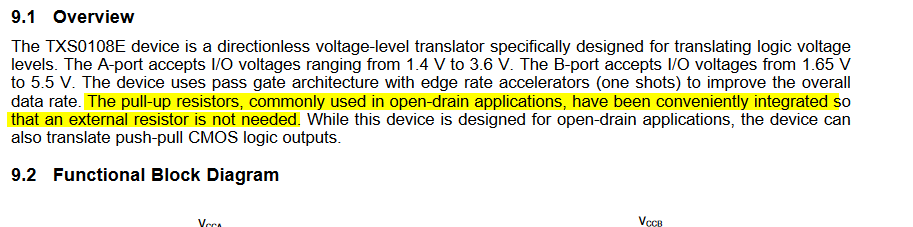
Gustl B. schrieb: > Ich hatte > da weder Pullup noch Pulldown Widerstände an den Leitungen. Pulldown wäre auch eher kontraproduktiv ;) Siehe dabla...
Johnson 3. schrieb: > wozu ich den Pull-Down Widerstand am Pin OE (Output Enable) > benötige? Das Datenblatt sagt: > When the output-enable (OE) input is low, all outputs are placed in the > high-impedance (Hi-Z) state. > > To ensure the Hi-Z state during power-up or power-down periods, tie OE to > GND through a pull-down resistor. Wenn dir der Zustand der I/O-Pins während des Anschaltens egal ist, dann kannst du OE direkt mit VCC verbinden. > wie ich den Widerstand auf Basis der Angaben im Datenblatt > dimensioniere? Der Leckstrom des Eingangs ist nicht I_OZ, sondern I_I. (Also nicht 2 µA, sondern 2 µA. :-) Oder nimm einfach 10 kΩ. > ob sich das Spannungspegelwandler für SPI-Kommunikation eignet Der TXS hat in den Datenleitungen eingebaute Pull-Up-Widerstände, du kannst dort also keine Pull-Downs benutzen. Und wenn du die SPI-Ausgänge deiner Chips nicht aus Versehen als Open-Drain konfiguriest hast, dann ist 60 Mbps korrekt.
Johnson 3. schrieb: > Ok, und warum lasse ich den Widerstand dann nicht weg und schließe > direkt an VCC oder GND an? Wenn du OE ständig auf H halten willst, dann kannst du den natürlich direkt mit Vcc verbinden. Aber der Schaltungsvorschlag aus dem Datenblatt geht davon aus, daß du den OE Pin des TXS0108 mit einem Pin des µC steuerst. Und dann darfst du den natürlich nicht direkt mit Vcc oder GND verbinden. Denn dann könnte der µC den Pegel ja nicht mehr ändern. Direkte Verbindung von OE mit GND ist in jedem Fall sinnlos. Dann wäre der TXS0108 permanent hochohmig und man könnte ihn gleich komplett weglassen. Nochwas. Die beiden Verwendungen von Pullup/Pulldown Widerständen, die du zeigst, sind grundsätzlich unterschiedlich. Denn einmal hängt der Pullup an einem Eingang, das andere Mal ein Pulldown an einem Ausgang. Und zwar sogar an einem Gegentakt-Ausgang. In diesem Fall hat der Pulldown nur einen einzigen Zweck: einen definierten Logikpegel herzustellen, so lange der Ausgang inaktiv ist (hier z.B. wenn der µC im Reset ist).
Clemens L. schrieb: > Der TXS hat in den Datenleitungen eingebaute Pull-Up-Widerstände, du > kannst dort also keine Pull-Downs benutzen. Und wenn du die SPI-Ausgänge > deiner Chips nicht aus Versehen als Open-Drain konfiguriest hast, dann > ist 60 Mbps korrekt. Open-Drain bezeichnet eine Schaltung aus Pull-Up-Widerstand und MOSFET. Was hat das mit der Übertragungsfrequenz meiner SPI Schaltung zu tun? Axel S. schrieb: > Nochwas. Die beiden Verwendungen von Pullup/Pulldown Widerständen, die > du zeigst, sind grundsätzlich unterschiedlich. Denn einmal hängt der > Pullup an einem Eingang, das andere Mal ein Pulldown an einem > Ausgang. Und zwar sogar an einem Gegentakt-Ausgang. In diesem Fall hat > der Pulldown nur einen einzigen Zweck: einen definierten Logikpegel > herzustellen, so lange der Ausgang inaktiv ist (hier z.B. wenn der µC im > Reset ist). Wieso ist der Pin OE ein Gegentakt-Ausgang? Nicht der Chip erzeugt eine Spannung sondern meine Beschaltung. Axel S. schrieb: > Wenn du OE ständig auf H halten willst, dann kannst du den natürlich > direkt mit Vcc verbinden. Aber der Schaltungsvorschlag aus dem > Datenblatt geht davon aus, daß du den OE Pin des TXS0108 mit einem Pin > des µC steuerst. Und dann darfst du den natürlich nicht direkt mit Vcc > oder GND verbinden. Denn dann könnte der µC den Pegel ja nicht mehr > ändern. Verstehe ich auch nicht. Wenn ich den Pegel an OE durch einen uC erzeuge, brauche ich nach meinem Verständnis den Pull-Down nicht mehr. Es sei denn, mein uC liefert kein Signal, weil er im Reset o.ä. ist. Meintest du das?
Johnson 3. schrieb: > Axel S. schrieb: >> Nochwas. Die beiden Verwendungen von Pullup/Pulldown Widerständen, die >> du zeigst, sind grundsätzlich unterschiedlich. Denn einmal hängt der >> Pullup an einem Eingang, das andere Mal ein Pulldown an einem >> Ausgang. Und zwar sogar an einem Gegentakt-Ausgang. In diesem Fall hat >> der Pulldown nur einen einzigen Zweck: einen definierten Logikpegel >> herzustellen, so lange der Ausgang inaktiv ist (hier z.B. wenn der µC im >> Reset ist). > > Wieso ist der Pin OE ein Gegentakt-Ausgang? Der Pulldown hängt nicht nur am OE Pin. Da ist auch noch ein GPIO des µC im Spiel. Und der ist natürlich ein Ausgang, schließlich soll der den TXS0108 freigeben bzw. sperren können. So lange der µC den TXS0108 nicht freigibt (mit einem H-Pegel an OE), macht der gar nichts. >> Wenn du OE ständig auf H halten willst, dann kannst du den natürlich >> direkt mit Vcc verbinden. Aber der Schaltungsvorschlag aus dem >> Datenblatt geht davon aus, daß du den OE Pin des TXS0108 mit einem Pin >> des µC steuerst. Und dann darfst du den natürlich nicht direkt mit Vcc >> oder GND verbinden. Denn dann könnte der µC den Pegel ja nicht mehr >> ändern. > > Verstehe ich auch nicht. Wenn ich den Pegel an OE durch einen uC > erzeuge, brauche ich nach meinem Verständnis den Pull-Down nicht mehr. > Es sei denn, mein uC liefert kein Signal, weil er im Reset o.ä. ist. > Meintest du das? Das meinte ich nicht nur, das schrieb ich auch. Lies die Antworten doch einfach mal komplett
Axel S. schrieb: > Das meinte ich nicht nur, das schrieb ich auch. Lies die Antworten doch > einfach mal komplett Ich habe deine Antwort durchaus komplett gelesen, aber in meiner Erfahrung haben sich Rückfragen bewährt. Gefühlte neunzig Prozent der Antwortgeber ignorieren schlicht die Fragestellung, vereinfachen sie oder formulieren ihre Antworten schlicht unpräzise. Zum Beispiel habe ich eingangs nach der Berechnung des Pull-Down Widerstands gefragt. Außer vielleicht Clemens ist in 10 Antworten nicht einer auf die Frage eingegangen. Die Rückfrage war hier vielleicht überflüssig. Aber ums kurz zu fassen: Danke, ich habe die beiden Punkte verstanden. ;) Wäre noch die Teilfrage offen: Johnson 3. schrieb: > Clemens L. schrieb: > >> Der TXS hat in den Datenleitungen eingebaute Pull-Up-Widerstände, du >> kannst dort also keine Pull-Downs benutzen. Und wenn du die SPI-Ausgänge >> deiner Chips nicht aus Versehen als Open-Drain konfiguriest hast, dann >> ist 60 Mbps korrekt. > > Open-Drain bezeichnet eine Schaltung aus Pull-Up-Widerstand und MOSFET. > Was hat das mit der Übertragungsfrequenz meiner SPI Schaltung zu tun?
Johnson 3. schrieb: > Wäre noch die Teilfrage offen: Erste Seite im Datenblatt aus dem ersten Post hier:
1 | • Maximum data rates |
2 | – 110 Mbps (push pull) |
3 | – 1.2 Mbps (open drain) |
Johnson 3. schrieb: > Verstehe ich auch nicht. Wenn ich den Pegel an OE durch einen uC > erzeuge, brauche ich nach meinem Verständnis den Pull-Down nicht mehr. Im normalen Betrieb (Wenn alles Eingeschaltet und initialisiert ist) hast du recht, da brauchst du in der Schaltung den Pull-Down nicht da ja im normalen Betrieb die Zustände des OE-Pins immer klar definiert sind (Ann.: Das Programm des uC ist fehlerfrei). Der Pull-Down wird z.B. für das Einschalten gebraucht denn in der Initialisierungsphase kann es durchaus sein, dass der OE-Pin „macht was er will“. Der Pull-Down sorgt dafür, dass auch in solchen Betriebszuständen der OE-Pin stets ein definiertes Signal hat und die Schaltung zu jeder Zeit in einem sicheren Betriebszustand ist. Das ist der Sinn und Zweck eines jeden Pull-Downs/Pull-Ups. ;)
Johnson 3. schrieb: > Zum Beispiel habe > ich eingangs nach der Berechnung des Pull-Down Widerstands gefragt. > Außer vielleicht Clemens ist in 10 Antworten nicht einer auf die Frage > eingegangen. Warum sollte man das auch tun? Johnson 3. schrieb: > Ich habe deine Antwort durchaus komplett gelesen, aber in meiner > Erfahrung haben sich Rückfragen bewährt. Gefühlte neunzig Prozent der > Antwortgeber ignorieren schlicht die Fragestellung, vereinfachen sie > oder formulieren ihre Antworten schlicht unpräzise. Ich danke dir für diese Klarstellung. Da war es dann ja richtig hier bisher nicht zu antworten. 90% der Antwortenden ignorieren die Fragen. Der Fragesteller ignoriert 90% der Antworten. So kann man mit viel Glück eine positive Kommunikationsrate von 5% erreichen. Also sind solche Unterhaltungen eher wertlos, bis unangenehm. Energieverschwendung. Und Tschüss...
Gustl B. schrieb: > Erste Seite im Datenblatt aus dem ersten Post hier:• Maximum data rates > – 110 Mbps (push pull) > – 1.2 Mbps (open drain) Peinlich - da habe ich vor lauter Tabellen wohl das offensichtliche übersehen. Allen, die verstehen wollen, warum die Übertragungsraten unterschiedlich sind, kann ich den folgenden Artikel empfehlen: https://www.mikrocontroller.net/articles/Ausgangsstufen_Logik-ICs
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.