Hi, ich hätte mal eine Anfängerfrage zu einem PID-Regelkreis (erst mal egal ob der wirklich diskret aufgebaut oder mittels einer Software in einem DSP implementiert ist): Angeommen, ich habe einen Lautsprecher, der ein Feedbacksignal liefert, d.h. ich kann zu jedem Zeitpunkt feststellen, wie stark dessen Membran wirklich ausgelenkt ist. Dann könnte ich diesen ja prinzipiell mit einem PID-Regelkreis betreiben, um eine möglichst wirklichkeitsnahe Wiedergabe zu erhalten, sprich dass die Trägheit der Lautsprechermembran ausgeglichen wird. Weiterhin angenommen, die Maximalauslenkung dieses Lautsprechers ist bei +3V bzw. -3V Eingangsspannung erreicht (und die Spulen sind ausreichen dimensioniert, so dass diese für meine folgende Frage keine Rolle spielen). Wenn der Lautsprecher jetzt einen Sprung zu einer bestimmten Auslenkung ausführen soll, so dauert das ja eine gewisse Zeit, in der sich die Membran dort hin bewegt und in der die Sollposition ungleich der Istposition ist. Meine Frage: kann ich einen Regelkreis so dimensionieren, dass er für die Dauer des Weges zur Istposition eine höhere Spannung (z.B. 40 V) an die Spule anlegt, diese aber mit Annäherung der Soll- and die Istposition auf die entsprechende Spannung herunterregelt? Also dass der Regelkreis nicht nur mit den maximal +-3V arbeitet, sondern so lange die Membran nicht da ist, wo sie sein soll, mit einer deutlich höheren Spannung und Leistung arbeitet? Danke!
Gerd schrieb: > ...sondern so lange die Membran nicht da ist, wo sie sein soll, mit einer > deutlich höheren Spannung und Leistung arbeitet? Der D-Anteil macht genau das.
Rumms kaputt schrieb: > Deine Vorstellungen sind falsch! Vielen Dank für deine umfangreichen und ausführlichen Ausführungen. Jetzt weiß jeder Bescheid ;-)
Das ist ja der Sinn und Zweck eine PID Reglers. Aber bedenke das die maximale Frequenz der Regelung nicht über der vom Chassis liegen sollte wo die Membran noch keine Partialverzerrungen erzeugt, dann wäre der Vorteil der Regelung für die Katz weil diese Verzerrungen nicht kontrolliert werden könnten. Wenn Du die Trennfrequenz aber tief genug ansetzt hast Du noch Raum nach oben für die Regelung. Bei 40V würde ein krasse Beschleunigung wirken und bei Annäherung an die Sollposition wäre die Membran schnell was entsdprechende Bremskräfte nötig macht => PID Regler. Achte auf die maximal Leistung des Chassis.
Ob das in dem Fall sinnvoll ist, ist eine Frage, aber grundsätzlich ist es genau das, was meine Regelung macht.
Moin, Ist genauso, wie wenn du Nudeln kochen willst: Du stellst das Nudelwasser auf den Herd und gibst Vollgas. Wenns dann kocht, Nudeln rein und den Herd auf deutlich kleiner stellen, sonst gibts Sauerei. Denn du willst ja moeglichst schnell Nudeln essen, also sollte das Wasser idealerweise in einer Art Sprungfunktion von Wasserhahntemperatur auf 100°C sein. Genauso laeufts bei deinem Lautsprecher. Nur sollte der eben die hoehere Leistung vertragen. So wie deine Herdplatte prinzipiell dafuer gebaut ist, mit maximaler Leistung zu laufen. Verbaselst du deinen Herdanschluss, und die Platte haengt zwischen 2 Phasen, dann koennte es zwar sein, dass dein Nudelwasser noch schneller kocht, aber koennte auch gut sein, dass deine Herdplatte einfach an Ueberlastung stirbt. Das sollte bei Nudelwasserkochplatten und Lautsprechern vermieden werden. Gruss WK
Solche Ansätze mit einer Regelung der Membramauslenkung gab es schon vor langer Zeit, d.h. in der 1970er Jahren, aber sie haben sich in den meisten Fällen als nicht vorteilhaft erwiesen. Alle paar Jahre holt zwar irgendjemand dieses Thema wieder aus der Schublade, aber das war es dann auch. Eine Lautsprechermembran ist nicht völlig steif, sondern sie verformt sich bei der Bewegung ganz erheblich, d.h. zu einen durch ihre eigene Massenträgheit und zum anderen durch den Luftwiderstand bzw. die Luftmassenträgheit. Bei der Konstruktion von Lautsprechern gibt es daher zwei gegensätzliche Anätze: 1. maximale Steifheit der Membran 2. maximale Schwingungsdämpfung Die Lösung 1. sieht einfach aus, hat aber den Nachteil, dass es zur Ausbildung von Resonanzen kommen kann. Ein Weinglas klingt beim Anstoßen ja auch wesentlich stärker nach als ein Pappbecher, obwohl sich der Pappbecher deutlich stärker verformt. Lösung 2. hat zwar tolle Dämpfungseigenschaften (Pappbecher), aber auch einen schlechten Wirkungsgrad und eine stark frequenz- und amplitudenabhängige Richtungsabhängigkeit der der Schallabstrahlung. Wenn man nun mit einem einfachen PID-Regler ankommt und versucht, die Position der Lautsprechermembran an welchem Punkt auch immer zu regeln, machen sich die unterschiedlichen Laufzeiten der im Lautsprecher reflektierten Signalanteile deutlich bemerkbar. Das ganze wird dann eher völlig instabil werden. Wesentlich erfolgversprechender sind daher mittlerweile Ansätze mit adaptiven prädiktiven Reglern, die auf historische Abweichungen schauen, um damit ihre Parameter für zukünftige Signale zu optimieren. Letztendlich ist aber die Position der Lautsprechermembran an einem bestimmten Punkt ohnehin nur ein mittelmäßig prächtiges Maß für die "korrekte" Schallabstrahlung. Letzendlich will man ja in den meisten Fällen den Sinneseindruck des Hörers optimieren. Und da liegen eben im wahrsten Sinne des Wortes Welten dazwischen. Ein anderes, durchaus funktionsfähiges Verfahren besteht darin, am vermuteten Aufenthaltsort des späteren Zuhörers einen Kunstkopf zu platzieren und dann mittels geeigneter Testsignale die Systemeigenschaften der ganzen Signalübertragungskette vom Testsignalgenerator bis zum Ohr zu bestimmen und dann entsprechend zu optimieren. Mit PID-Reglern kommt man auf Grund der langen Totzeiten aber auch hier nicht voran.
Alles tolle Theorie, aber im praktischen Beispiel Lautsprecher würden diese "Turboeffekte" das Endprodukt Schall totall verzerren, da das ganze System ja für die bekannte/ungetunte Dynamik ausgelegt ist.
>> ...sondern so lange die Membran nicht da ist, wo sie sein soll, mit einer >> deutlich höheren Spannung und Leistung arbeitet? >Der D-Anteil macht genau das. Nein. Der P Anteil macht das.
Dergute W. schrieb: > Denn du willst ja moeglichst schnell Nudeln essen, also sollte das > Wasser idealerweise in einer Art Sprungfunktion von Wasserhahntemperatur > auf 100°C sein. Nein, das ist ein Trugschluss. Idealerweise sollte das Wasser sofort kochen. Wäre der Luftdruck geringer als bei Normbedingungen, so dass das Wasser z.B. bei 97°C kocht, dann hätte die schlagartige Erwärmung auf 100°C zur Folge, dass der Schmodder überall durch die Gegend fliegt. Spätestens beim Hineinlegen der Nudeln würde der Siedeverzug zu einer schlagartigen Verdampfung führen. Wie schon in meinen Ausführungen zu Lautsprechern dargestellt, ist daher ein einziger fester Surrogatparameter (Wassertemperatur) nur eingeschränkt sinnvoll. Wesentlich sinnvoller wäre daher eine Anleitung wie: "Erhitze das Wasser so lange mit voller Leistung, bis rechnerisch bei bekannter Wassermenge und bekanntem Luftdruck der Siedepunkt knapp erreicht sein kann. Danach heize mit reduzierter Leistung weiter, bis kein Temperaturanstieg mehr erfolgt, also das Wasser siedet. Dann reduziere die Leistung weiter, um das Sieden aufrechtzuerhalten." Wenn die Wassermenge und der Luftdruck nicht bekannt sein sollten, muss ggf. von Anfang an nach der Temperaturanstiegsmethode geregelt werden, so wie es ja auch bei besseren Ladegeräten für NiCd- und NiMH-Akkus gemacht wird.
Andreas S. schrieb: > > Eine Lautsprechermembran ist nicht völlig steif, sondern sie verformt > sich bei der Bewegung ganz erheblich, d.h. zu einen durch ihre eigene > Massenträgheit und zum anderen durch den Luftwiderstand bzw. die > Luftmassenträgheit. Bei der Konstruktion von Lautsprechern gibt es daher > zwei gegensätzliche Anätze: Ein solch mieses Chassis würde ich nichtmal ohne Regelung verbauen. Der nutzbare F-Bereich ist jedoch beschränkt und wenn die membran anfängt nicht mehr Kolbenmässig zu arbeiten ist es Vorbei mit Klang. Jeder LS-Bauer weis das und wählt seine Chassis und Trennfrequenzen/Steilheit entsprechend aus.
Öhm schrieb: > Die Aufgabe des D-Anteils ist es, das System zu dämpfen. Je nachdem von wo aus man guckt. Es kommt darauf an, ob das Differenzierglied im Signalweg, oder in der Gegenkopplung liegt.
Öhm schrieb: > Die Aufgabe des D-Anteils ist es, das System zu dämpfen. Nein, D steht für differenzieren. Der D Anteil ist proportional zur Änderungsgeschwindigkeit der Regeldifferenz. Sprich eine schnelle Sollwertänderung führt zu einem Regelsignal, genauso wie eine schnelle Momentanwertänderung. Dabei ist es erst mal unerheblich ob die schnelle Momentanwertänderung auf eine Änderung des Stellwerts oder auf eine Störgröße zurückzuführen ist. Korrekter wäre die Aussage das D Verhalten wirkt einer schnellen Änderung des Momentanwerts entgegen. Dämpfen ist falsch, denn ein zu starker D Wert macht ein System gerne auch mal instabil, ist dann also das Gegenteil einer Dämpfung.
Angehängte Dateien:
-

Lautsprecher.jpg
230 KB
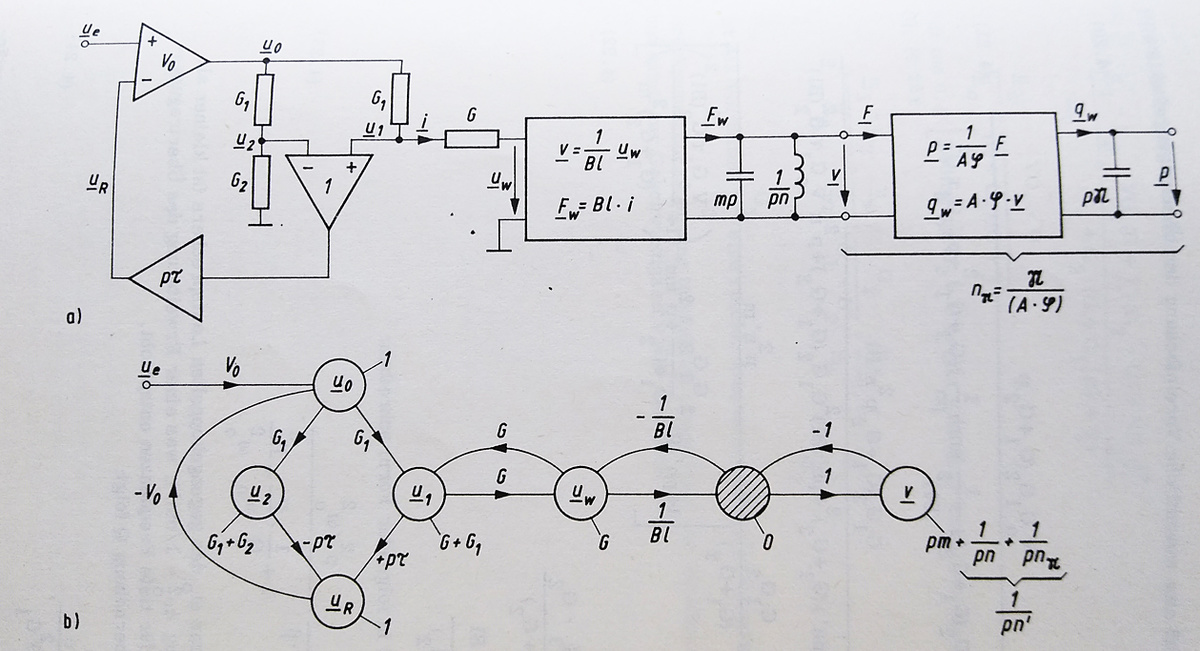
Man beschreibe einen elektrodynamischen Lautsprecher mit (Beschleunigungs)gegenkopplung und berechne sein Verhalten grob (meinetwegen auch mittels Simulation). Somit bekommt man ein Gefühl dafür, was möglich ist. Ein guter Ansatz dafür ist in [1] zu finden. [1] U. Mende: Netzwerkanalyse mit Mason-Graphen
Andreas S. schrieb: > Wesentlich sinnvoller wäre daher eine Anleitung wie: "Erhitze das Wasser > so lange mit voller Leistung, bis rechnerisch bei bekannter Wassermenge > und bekanntem Luftdruck der Siedepunkt knapp erreicht sein kann. OK, erst mal vielen Dank für die umfangreichen Hinweise. Grundsätzlich geht es mir darum, mit dem System ein wenig zu spielen und mich endlich mal in die Regelungstechnick hineinzufuchsen. D.h. auch wenn der Lautsprecher hinterher auf Grund anderer Seiteneffekte schei** klingt, will ich mich doch an so einem System versuchen. Und: ich kann keine Annahmen über das Verhalten des Lautsprechers/des Wassertopfes und den Eigenschaften seiner Umgebung treffen, da ich dessen Verhalten nicht kenne. D.h. es wäre eher meine Idee, diesen (da kommt dann eine DSP-Regelung ins Spiel) auszumessen und die besten PID-Werte mehr oder weniger Automatisch zu ermitteln. Aber das ist eher noch Zukunftsmusik :-)
Öhm schrieb: >>> ...sondern so lange die Membran nicht da ist, wo sie sein soll, mit einer >>> deutlich höheren Spannung und Leistung arbeitet? > >>Der D-Anteil macht genau das. > Nein. Der P Anteil macht das. OK, der P-Anteil ist dann auch genau der, der zu einem Überschwingen führt, wenn er zu groß gewählt wird, richtig? D.h. es muss abhängig vom Verhalten der Membran in der Nähe des Istwertes runtergeregelt/gedämpft werden. Das macht der D-Anteil?
von NichtWichtig schrieb: >Andreas S. schrieb: > >> Eine Lautsprechermembran ist nicht völlig steif, sondern sie verformt >> sich bei der Bewegung ganz erheblich, d.h. zu einen durch ihre eigene >> Massenträgheit und zum anderen durch den Luftwiderstand bzw. die >> Luftmassenträgheit. Bei der Konstruktion von Lautsprechern gibt es daher >> zwei gegensätzliche Anätze: >Ein solch mieses Chassis würde ich nichtmal ohne Regelung verbauen. >Der nutzbare F-Bereich ist jedoch beschränkt und wenn die membran >anfängt nicht mehr Kolbenmässig zu arbeiten ist es Vorbei mit Klang. Ist aber grundsätzlich immer so wie "Andreas S." schrieb, auch beim besten Lautsprecher. bei hohen Frequenzen schwingt nur noch ein kleiner Teil in der Mitte der Membranfläche. Es gibt Lautsprecher die haben deshalb einen Kleinen Hochtonkegel in der Mitte. Das gröste Problem bei Regelkreisen algemein ist, Regelschwingen zu verhindern wenn das Steuern träge ist. Das war auch der Grund, daß der Reaktor in Tschernobyl durchgegangen ist, die Leute hatten schon längst gegengesteuert aber die Temperatur ist trotzdem noch gestiegen. Ein anderes Beispiel, ein Bauer hat mit seinem Trecker eine Kreissäge angetrieben, der Trecker hatte eine Drehzahlregelung. Die Drehzahl lief im Leerlauf immer abwechselnd schnell und langsam, nur beim Sägen, also unter Last hat es sich dann stabilisiert.
Ein PID-Regler kann prinzipiell keine Strecken mit konjugiert komplexen Polen, also schwingungsfähige Systeme, regeln, ausser die Dämpfung ist ausreichend hoch. Es gibt dafür auch ein Kriterium. Schau mal in eines der Bücher von Aström rein. Er hat ein sehr anschauliches Kriterium basierend auf der Impulsantwort des Systems definiert. Eine eingespannte Membran ist mit Sicherheit nicht stark gedämpft, dies widerspräche dem Sinn und Zweck einer Membran, stellt also ein schwach gedämpftes schwingungsfähiges System dar und ist daher nicht mittels eines PID-Reglers regelbar. Aber auch wenn dem nicht so wäre, kann ein PID-Regler keine Dynamik bzw. Trägheit kompensieren. Deine Grundannahme in deinem Eröffnungsbeitrag war also schon falsch.
Gerd schrieb: > Grundsätzlich > geht es mir darum, mit dem System ein wenig zu spielen und mich endlich > mal in die Regelungstechnick hineinzufuchsen. Dann würde ich sagen, such Dir ein anderes Studienobjekt! Hier wurde schon erklärt, wie komplex das Schwingungsverhalten der Membran ist. Aber Du schreibst ja nonchalant: > Angeommen, ich habe einen Lautsprecher, der ein Feedbacksignal liefert, > d.h. ich kann zu jedem Zeitpunkt feststellen, wie stark dessen Membran > wirklich ausgelenkt ist. Hast Du den denn wirklich? Ich kenne verschiedene Prinzipien, wie ein Mikrofon oder Beschleunigungsmesser auf der Membran, aber die haben ja IHRERSEITS auch ein dynamisches Verhalten und geben Dir NICHT die Info, wo sich die Membran gerade befindet! Zumal Du den Begriff Auslenkung (s.o.) eh nicht "eindimensional" betrachten kannst. Da bilden sich die witzigsten Partialschwingungen und damit nichtlineare Verzerrungen.
Günter Lenz schrieb: > von NichtWichtig schrieb: >>Andreas S. schrieb: >> >>> Eine Lautsprechermembran ist nicht völlig steif, sondern sie verformt >>> sich bei der Bewegung ganz erheblich, d.h. zu einen durch ihre eigene >>> Massenträgheit und zum anderen durch den Luftwiderstand bzw. die >>> Luftmassenträgheit. Bei der Konstruktion von Lautsprechern gibt es daher >>> zwei gegensätzliche Anätze: > >>Ein solch mieses Chassis würde ich nichtmal ohne Regelung verbauen. > >>Der nutzbare F-Bereich ist jedoch beschränkt und wenn die membran >>anfängt nicht mehr Kolbenmässig zu arbeiten ist es Vorbei mit Klang. > > Ist aber grundsätzlich immer so wie "Andreas S." schrieb, > auch beim besten Lautsprecher. bei hohen Frequenzen schwingt > nur noch ein kleiner Teil in der Mitte der Membranfläche. > Es gibt Lautsprecher die haben deshalb einen Kleinen > Hochtonkegel in der Mitte. > Natürlich gibt es Breitbänder die das so machen, sogar sehr gute und sehr teure. (z.B. AER https://aer-loudspeakers.com/aer-breitbandchassis-bd/?lang=de) T+A hatte in ihrer A2D optische Sensoren an den Bässen um die Digitalweiche mit der IST-Position der Membran zu füttern, die DSP werden wohl genau das gemacht haben was der TO hier versuchen möchte. https://www.ta-hifi.de/wp-content/uploads/solitaire_a2d_de.pdf Backes&Müller - heute wohl Silbersand - haben aktive Regelungen schon vor Jahrzehnten gemacht. Und es wird sicher noch mehr davon geben. Bei einer Mehrwegebox werden sinnigerweise Chassis insbesondere im Tief- und Mitteltonbereich eingesetzt wo die obere Trennfrequenz so gelegt wird das der Bereich wo das Chassis anfängt zu klirren nicht mehr angeregt wird. Z.B. "Klang+Ton" oder "Hobby HiFi" zeigen bei ihren LS Bauvorschlägen genau das jedesmal auf!
Der Ansatz ist sehr einfach. Mikrophon und Lautsprecher bilden einen Verstaerker. Also das Signal des Lautspreches auf den Pegel des Mikros bringen und dann eine Differenz bilden. Ist sie Null, dann ist alles ok. Mit geeigneten Reglern die Summe zu Null bringen das ist die Aufgabe.
Ich empfehle zum Thema mal bei "Motional Feedback" zu googeln, was ja auch tatsächlich mal durchgeführt wurde und zu kaufen war. Ein anderes Verfahren ist, den Lautsprecher in eine Brückenschaltung einzugliedern und einen Brückenzweig zur Gegenkopplung zu nutzen. Sollte theoretisch dessen Eigenleben wirksam unterdrücken. Kann man als Bastler und Hobbyentwickler gerne mal ausprobieren, am besten mit Ohrenschutz, wenn die Gegenkopplung zu zur Rückkopplung mutiert ... Die besten Ergebnisse bekommt man heute schlicht und ergreifend mit einem normal (durch die Verstärker-Gegenkopplung niederohmig) angeschlossenen Lautsprecher, dessen Frequenzgang und vor allem dessen Raum-Moden im Abhörraum (an der Abhörposition!) mittels DSP optimiert werden. Irgendwelche Gegenkopplungen über ein Mikrofon wird entweder völlig wirkungslos sein oder zu übelstem Pfeifkonzert führen. Grüße, OldUri Nachtrag: ich sehe gerade, dass, seit ich diesen Beitrag begonnen habe, einiges von dem schon ausführlich erwähnt wurde.
NichtWichtig schrieb: > T+A hatte in ihrer A2D optische Sensoren an den Bässen um die > Digitalweiche mit der IST-Position der Membran zu füttern, die DSP > werden wohl genau das gemacht haben was der TO hier versuchen möchte. > https://www.ta-hifi.de/wp-content/uploads/solitaire_a2d_de.pdf In dem Datenblatt steht keineswegs etwas von einem PID-Regler, wie ihn der TE unbedingt verwendet will. Dort wird auch nur allgemein gesagt: "Die Bässe werden opto-elektronisch überwacht.", jedoch ohne einen Hinweis auf eine Positions- und Geschwindigkeitsregelung. Wahrscheinlich hatte der Hersteller so etwas geplant, aber entweder nicht fertiggestellt bekommen, oder es klang kacke. > Backes&Müller - heute wohl Silbersand - haben aktive Regelungen schon > vor Jahrzehnten gemacht. Genau. Vor Jahrzehnten. Wie von mir beschrieben. Und trotzdem hat es sich nicht durchgesetzt, obwohl heutzutage die entsprechende Sensorik um Größenordnungen billiger und kleiner wäre als damals. > Bei einer Mehrwegebox werden sinnigerweise Chassis insbesondere im Tief- > und Mitteltonbereich eingesetzt wo die obere Trennfrequenz so gelegt > wird das der Bereich wo das Chassis anfängt zu klirren nicht mehr > angeregt wird. Du hast offenbar überhaupt nicht ansatzweise die physikalischen Hintergründe von Lautsprechern verstanden. Selbst wenn man einen Breitbandlautsprecher mit idealer Steifigkeit der Membran und idealer Ansteuerung und Auslenkung hätte, käme es dennoch zu Verzerrungen. Die Gründe hierfür liegen zum einen in der amplitudenabhängigen Dopplerverschiebung verschiedener Frequenzen und zum anderen in einer nichtlinearen Dichtemodulation der angeregten Luft. Diese Effekte machen sich bei geringen Lautstärken nicht bemerkbar, sondern nehmen erst mit der Lautstärke bzw. Membrangeschwindigkeit zu. Bei realen Lautsprechern kommen natürlich auch noch andere Effekte hinzu.
Man sollte daher klein anfangen und sich bzw. auf das Basschassis begrenzen. Die bereits angesprochen Membranverzerrungen sollte damit nicht zu standen kommen. Wenn dort ein brauchbares Ergebnis erzielt wurde darf man über den Mitteltöner nachdenken und versuchen das Vorhandene dort hin zu adaptieren. Aber die Praxis zeigt das aktiv geregelte Systeme im Hochpreissegment zu finden sind und durch lange Entwicklungsprozesse liefen. Das ist eher nix für Einsteiger.
>Ein PID-Regler kann prinzipiell keine Strecken mit konjugiert komplexen >Polen, also schwingungsfähige Systeme, regeln, ausser die Dämpfung ist >ausreichend hoch. Was? Ein PID ist der ideale Regler für eine PT2 Strecke. Auch für solche mit Null Dämpfung.
Öhm schrieb: >>Ein PID-Regler kann prinzipiell keine Strecken mit konjugiert komplexen >>Polen, also schwingungsfähige Systeme, regeln, ausser die Dämpfung ist >>ausreichend hoch. > > Was? > Ein PID ist der ideale Regler für eine PT2 Strecke. Auch für solche mit > Null Dämpfung. Dann mach das doch mal und widerlege die Theorie.
Das ist keine Theorie. Ich glaube auch nicht, dass das Buch falsch ist, dass du zitiert. Vermutlich hast du es falsch verstanden. Ich könnte auch sehr gut beweisen/darstellen, weshalb ein PID genau der passende Regler für eine Strecke 2. Ordnung ist. Erfordert aber einige Skizzen. Aber dass man eine eine ungedämpfte Strecke 2. Ordnung mit einem PID oder PD perfekt regeln kann kann man ja mit jedem Simulationsprogramm zeigen. Sogar LT Spice. Sogar ein inverses Pedel kann man gut man mit einem PD regeln. I braucht man da ja nicht :)
>Ich könnte auch sehr gut beweisen/darstellen,
Kurzfassung ohne Skizze: über den Umweg eines Zustandsreglers, den man
dann aber sehr einfach in einen PID überführen kann.
Die PT2 Strecke in der Regelungsnormalform. Die Rückführung der
Zwischengröße zwischen beiden Energiespeichern entspricht der Dämpfung.
Parallel dazu kann man sich den D-Anteil denken, denn die Zwischengröße
kann ich durch den Differentiator beobachten.
Öhm schrieb: > Das ist keine Theorie. Ich glaube auch nicht, dass das Buch falsch ist, > dass du zitiert. Vermutlich hast du es falsch verstanden. > > Ich könnte auch sehr gut beweisen/darstellen, weshalb ein PID genau der > passende Regler für eine Strecke 2. Ordnung ist. Erfordert aber einige > Skizzen. > > Aber dass man eine eine ungedämpfte Strecke 2. Ordnung mit einem PID > oder PD perfekt regeln kann kann man ja mit jedem Simulationsprogramm > zeigen. Sogar LT Spice. > > Sogar ein inverses Pedel kann man gut man mit einem PD regeln. I braucht > man da ja nicht :) Natürlich kann ich mal etwas nicht verstanden haben. Es gibt sogar sehr viel mehr Sachen die ich nicht verstehe, als Dinge die ich verstehe. Das muss ich, leider, trotz der vielen Jahre Berufserfahrung als Regelungstechniker immer wieder feststellen. In diesem Fall allerdings mit hoher Wahrscheinlichkeit nicht. Nach nun schon mehreren Dekaden in Lehre und Forschung und industrieller Entwicklung hätte schon jemand Prof. Aström und mich aufgeklärt. Hast Du schon mal einen Regler entworfen? Mach doch einfach mal und überzeuge mich mit Fakten.
Ist nur im Bassbereich sinnvoll, weil nur da "merklicher Hub", sprich "Wegstrecke". Ziel: Resonanzfrequenz des geschlossenen Gehäusevolumens mit der Federkonstante des Chassis ausbügeln, glatter Frequenzgang. Serienmässig: Philips MFB567 u.a. "Motional Feedback Bass", Piezo-Biegeschwinger als Beschleunigungsaufnehmer. Funktioniert hervorragend.
Angehängte Dateien:
-

PID_PT2.png
37 KB
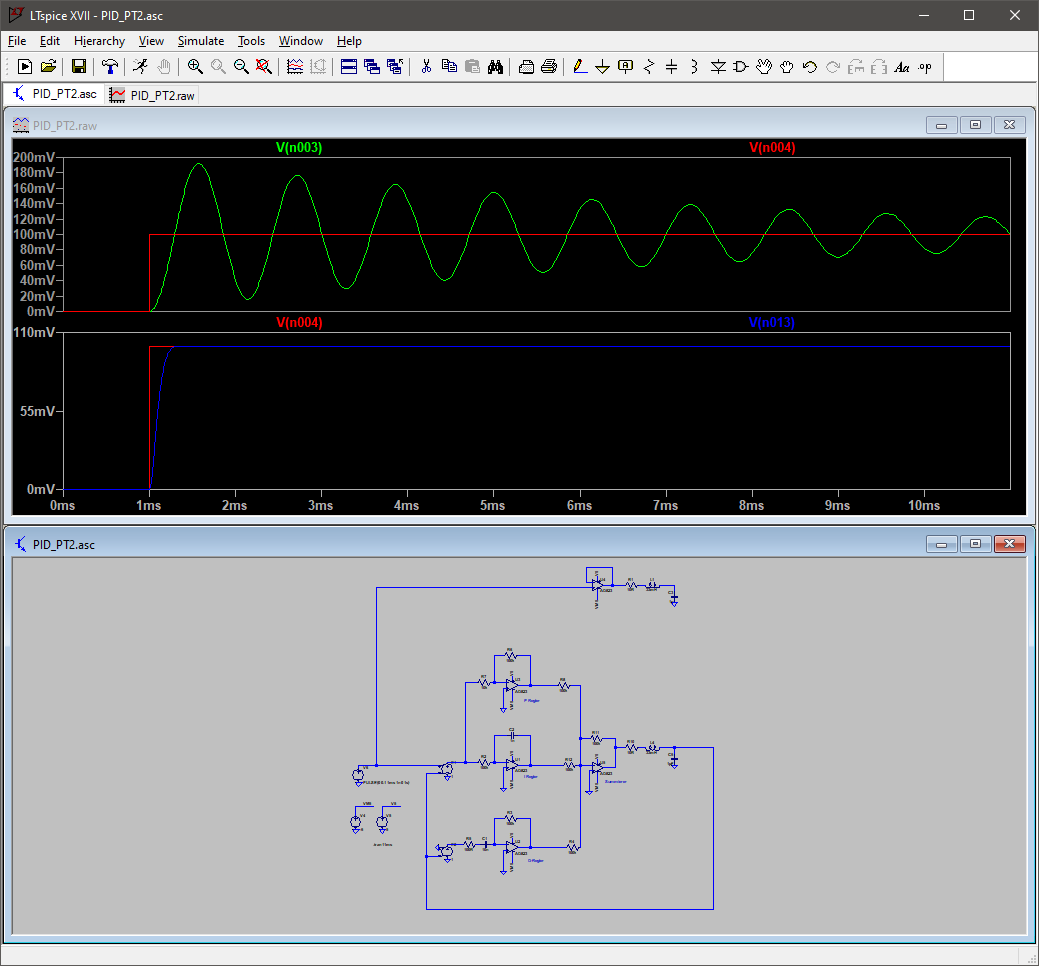
>Mach doch einfach mal und überzeuge mich mit Fakten.
Voila. hier eine PID Regler realisiert mit OPVs.
Strecke ist eine schwach gedämpfter LC Schwingkreis.
Oben (in grün) sieht man die Sprungantwort ohne Regler.
Unten mit PID Regler in blau. Sehr schön zu sehen, wie die Strecke
entdämpft wird.
Anbei auch das LTC Spice ASC File
Gunnar F. schrieb: >> Angeommen, ich habe einen Lautsprecher, der ein Feedbacksignal liefert, >> d.h. ich kann zu jedem Zeitpunkt feststellen, wie stark dessen Membran >> wirklich ausgelenkt ist. > Hast Du den denn wirklich? Ja, habe ich. Das Feedback wird über ein Analogsignal geliefert (Stromfluss proportional zur jeweiligen Auslenkung).
Öhm schrieb: >>Mach doch einfach mal und überzeuge mich mit Fakten. > > Voila. hier eine PID Regler realisiert mit OPVs. > Strecke ist eine schwach gedämpfter LC Schwingkreis. > > Oben (in grün) sieht man die Sprungantwort ohne Regler. > > Unten mit PID Regler in blau. Sehr schön zu sehen, wie die Strecke > entdämpft wird. > > Anbei auch das LTC Spice ASC File Hallo Ühm, zuerst einmal Danke für die Mühe. Find ich wirklich klasse, findet man in diesem Forum nicht so oft. Die Führungsübertragungsfunktion für einen kleinen Sollwertsprung unter idealen Verhältnissen innerhalb einer Simulationsumgebung ohne Rauschen und Störungen sieht überraschend gut aus. Aber wie schaut es mit der Störübertragungsfunktion aus? Und wie mit der Robustheit? Könnte man den Regler so wie Du ihn entworfen hast in der Praxis einsetzen? Kenne mich mit LTSpice nicht so gut aus, ich komme aus der Matlab-Ecke. Es ist mir leider nicht gelungen ein Bode-Diagramm des offenen Kreises zu ermitteln. Es kam immer eine Fehlermeldung: `Matrix is singular`. Du bekommst das sicher schneller hin als ich. Schaue Dir da mal den Amplituden- und Phasenrand an und bewerte die Robustheit des Entwurfs. Aber auch im Zeitbereich kannst Du schon ein Problem Deines Regelkreises erkennen: Gebe mal einen nicht ganz so winzigen Sollwert vor, z. B. 1V, und gebe eine sprungförmige Störung auf den Ausgang der Strecke, z. B. 0.1V. Prinzipiell solltest Du noch Rauschen addieren. Real vorhandenes Messrauschen und auftretende höherfrequente Störungen schränken in der Praxis die Verwendung des D-Anteils stark ein bzw. verhindern ihn sogar (zumindest in mechatronischen Systemen, aus der Ecke komme ich). Schau Dir auch mal das Kriterium nach Aström an: Der Quotient aus dem Integral über die Impulsantwort und dem Integral des Betrages der Impulsantwort muss größer als ca. 0.8 sein (aus dem Gedächtnis, habe die Qualle nicht hier). Ein ungedämpftes PT2 hätte hier als Ergebnis `0`, ein PT2 mit nur reellen Polen ein '1', alles andere liegt dazwischen.
Öhm schrieb: >>Mach doch einfach mal und überzeuge mich mit Fakten. > > Voila. hier eine PID Regler realisiert mit OPVs. Schoen waere es wenn sich die Regler mit Potis von 0 bis 100 % einstellen liessen in der Simulation. > Strecke ist eine schwach gedämpfter LC Schwingkreis. > > Oben (in grün) sieht man die Sprungantwort ohne Regler. > > Unten mit PID Regler in blau. Sehr schön zu sehen, wie die Strecke > entdämpft wird. > Ist es nicht gerade umgekehrt? Ich wuerde vermuten dass das Gegenteil richtig ist. > Anbei auch das LTC Spice ASC File Vielen Dank fuer die Muehe.
Darf ich das mit dem Nudelwasser mal aufgreifen? Sprungantwort: Ich hab tatsächlich nen riesigen(!) Topf mit Gargut, welches auf 62°C gehalten werden soll. Also ohne Regler erstmal Strom auf die Heizplatte und die Zeit stoppen, die es braucht, das Wasser auf Zieltemperatur zu erwärmen. (Ich hab so'n genaues DDR-Laborthermometer) Ist das die Sprungantwort, oder muss ich die Zeit hinzurechnen, die es braucht, das Wasser wieder auf Zimmertemperatur abkühlen zu lassen? Dankeschön, Äxl
Habs im Parallelthread eben gegenlesen können. Aufheizen und abkühlen sind zwei paar Schuhe. (Man, ist das kompliziert, son Topf Wasser auszuregeln - wenn man davon keine Ahnung hat).
Moin, Die Sprungantwort ist ja hoechstwahrscheinlich noch nicht zuende, wenn dein Topf 62° erreicht hat. Wahrscheinlich wuerde dein Topf ja noch waermer, wenn du weiterheizt. Wenns soweit geht, dass die Bruehe in deinem Topf verdampft, wird's auch noch nichtlinear. Ganz bloed... Wenn du deinen Topf eine Zeitlang aufheizt und danach die Heizung komplett abstellst, ist der Temperaturverlauf eine Ueberlagerung von 2 Sprungantworten, wo die 2. um deine Heizzeit spaeter einsetzt und umgekehrtes Vorzeichen gegenueber der ersten hat. Gruss WK
Öhm schrieb: >>> ...sondern so lange die Membran nicht da ist, wo sie sein soll, mit einer >>> deutlich höheren Spannung und Leistung arbeitet? > >>Der D-Anteil macht genau das. > Nein. Der P Anteil macht das. Das ist richtig, der P-Anteil liefert eine der Abweichung proportionale Ausgangsgröße -> wäre das, was gefragt war Öhm schrieb: > Die Aufgabe des D-Anteils ist es, das System zu dämpfen. Das ist meiner Meinung nach Falsch. Der D-Anteil macht alles andere als dämpfen! Ganz im Gegenteil, er reagiert auf jede kleinste (differentielle) Änderung. Er erhöht die Reaktionsgeschwindigkeit, sorgt im Gegenzug aber für steilflankige Signale (Überschwingen). Es gibt in der realen Welt keinen idealen Differenzierer, deshalb wird dieser oftmals zusammen mit einem Verzögerungsglied erster Ordnung (DT1-Glied) modelliert.
Paul S. schrieb: > Das ist meiner Meinung nach Falsch. Der D-Anteil macht alles andere als > dämpfen! Ganz im Gegenteil, er reagiert auf jede kleinste > (differentielle) Änderung. Jein. Der D-Anteil macht zwei Sachen: Ein D-Anteil im Rückführungszweig dämpft, ein D-Anteil im Führungszweig beschleunigt. Im Differenzzweig macht er also beides.
Backes&Müller hat die Geschwindigkeitsgegenkopplung erfolgreich swohl bei Bass als auch bei Mittel und Hochtonchassis seit den 70ger Jahren durchgeführt und verkauft. Mittlerweile sind nach Ablauf des Patentschutzes weitere Hersteller hinzu gekommen. Generell kann man sagen, das weder die Auslenkung noch die Beschleunigung über ein Chassis gegenkoppelbar ist. Beides führt dazu das das System entweder unterhalb der Resonanzfrequenzd des Chassis oder oberhalb des Chassis zu schwingen beginnt, wenn man nennenswerte Gegenkopplungsfaktoren erreichen will. Deswegen nimmt man auch die Geschwindigkeit als Führungsgröße , was einer Dämpfung des schwingungsfähigen Systemes entspricht. Das Verhalten des schwingungsfähigen Lautsprechers wird somit aperiodisch, und folgt direkt dem Eingangssignal. Dazu muss das Signal welches aus der Frequenzweiche kommt integriert werden um einen frequenzunabhängigen Schalldruck zu bekommen. Man kann entweder eine zweite um gegenüber der Treiberspule senkrecht angeordnete Sensorspule nehmen welche sich zwischen den Polen eines eigenen Magneten bewegt ( diese wird einfach der Endstufe am Eingang in Reihe geschaltet ) oder man kann es kapazitiv abgreifen, in dem man die Membran aus Alu herstellt und ihr eine Gegenelektrode hinter der Membran anordnet. Das ganze bildet ein Kondensatormikrofon, bei welcher der Verschiebestrom gemessen wird. Der Strom entspricht ebenfalls der Geschwindigkeit. Die Beschleunigungsgegenkopplung wie es Phillips angewendet hat funktioniert nur bei niedrigen Gegenkopplungsfaktoren, Das heist der schwingungsfähige Lautsprecher ist noch dominierend. Es gibt ein Papier von Backes&Müller wo die theoretischen Grundlagen genau erklärt sind, und wie man die Schwierigkeiten insbesonders was der nutzbare Dynamikbereich im gegengekoppelten System betrifft umschiffen kann. Ralph Berres
Gerd schrieb: > Weiterhin angenommen, die Maximalauslenkung dieses Lautsprechers ist bei > +3V bzw. -3V Eingangsspannung erreicht Eine Lautsprechermembran wird durch einen Elektromagneten ausgelenkt, dessen Kraft wiederum durch den Strom bestimmt wird. Die erforderliche Spannung hängt zusätzlich von Spulentemperatur und Membrangeschwindigkeit ab.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.