Hallo liebe Forenmitglieder, ich stelle mich kurz vor. Ich heiße Jan, bin 23 Jahre alt und habe eine Ausbildung als Elektroniker für Geräte und Systeme gemacht. Ich habe vor einem halben Jahr ein Projekt angefangen, dies hat mit einem selbst gebauten Trainingsgerät angefangen (Mechanik). Die Mechanik ist bald abgeschlossen und jetzt geht es an die Elektronik/Programmierung. Hier ein Video von einer Firma die bereits ein solches Produkt hat. Meine mechanischen Teile bestelle ich erst in 1-2 Wochen. https://www.youtube.com/watch?v=A4D2WGc_iAQ Dort wird die Übung Bizepscurl gezeigt. Zum Verständnis: Diese Plattform besteht aus einer gelagerten Achse, dort steckt eine Metallscheibe drauf. In der Achse ist zentrisch ein Band befestigt und an dem wird gezogen. Die Last kommt durch die Massenträgheit der Scheibe (diese rotiert sich dann) zustande. Das ganze kann man sich vorstellen wie ein JoJo. Man beschleunigt die Scheibe und muss sie dann wieder abbremsen. Mein Idee ist es jetzt zusätzliche Energie mit einem Motor in das System zu bringen, damit man noch bessere Trainingseffekte haben kann und man dann auch seine Leistung die man vollstreckt objektiv sehen kann. Dazu muss ich aber die Geschwindigkeit/Beschleunigung der Achse messen können. Ich bin bereit einiges an Zeit in das Projekt zu stecken, aber möchte evtl gleich mit der geeigneten Programmiersprache/Hardware starten. Deshalb habe ich mir gedacht ich frage erfahrene Elektroniker/Software Experten damit ich mir etwas Zeit sparen kann, da es bestimmt 1 Jahr dauert bis etwas dabei rauskommt. Ich habe seit ein paar Tagen auch bereits einen Kurs für Python angefangen. Die Messergebnisse sollten dann später auf PC/Android/IOS App ausgegeben werden. (Vlt als Webapp) Mir ist bewusst das es bestimmt sehr viel Zeit in anspruch nimmt, aber die habe ich gerade zur Verfügung. Meine Gedanken zur Hardware: Da ich schon mal eine Achse mit einem Arduino ausgewertet habe (interrupt) und die Erfahrung gemacht habe, dass es besser ist einen Absolutdrehgeber zu benutzen, würde ich solch einen nehmen. Zur Verarbeitung einen Raspberry Pi 4 und vlt die Programmiersprache Python. So wie ich das verstanden habe, ist aber der Raspberry nicht geeignet für solch eine Auswertung der Signale eines Encoders. Muss ich dann da ein extra Modul davor schalten? Der Raspberry soll das anscheinend nicht können, da er nicht Echtzeit Auswertungen machen kann. Ich bin für alle Gedanken/Hilfe sehr froh und offen für andere Ansätze! Wenn euch irgendwelche Informationen fehlen gerne schreiben :) Hoffentlich bin ich nicht komplett falsch in diesem Forum/Themengebiet gelandet. Sonst verschiebt es einfach in das passende :) Freundliche Grüße Jan
Ich kann mir nicht vorstellen, welchen Sinn bei diesem Ding ein
Absolutdrehgeber haben könnte.
Die Umdrehungen der Scheibe kannst du gut mit einer Reflex-Lichtschranke
erfassen, und einer (oder mehr) Markierung auf der Scheibe.
Was da ein Motor soll, musst du auch noch mal erklären. Motoren treiben
etwas an. Zum Beispiel die Fahrräder von Leuten, die ihre Muskeln
entlasten wollen.
> Muss ich dann da ein extra Modul davor schalten?
Kommt auf die konkreten Bauteile an. Wir können hier jetzt nicht einen
allgemeinen Rundumschlag über alle in Frage kommenden Sensoren und
Mikrocontroller machen.
PS: Die offen rotierende Scheibe halte ich für äußerst gefährlich.
Da reicht ein normaler optischer drehgeber mit Impulsen, also zum Beispiel mit 100 Impulsen alle 3° ein Impuls. Ein absoluter Drehgeber gibt ja nur immer wieder 1-360° aus, daher nennt man diesen auch Winkelgeber. Oder ist das wichtig wo die Scheibe stehen bleibt?
Hallo Stefan! Wow so eine schnelle Antwort! Ich geb nochmal ein Beispiel: Bei der Aufwärtsbewegung gebe ich nur mit meinen Muskeln eine bestimmte Kraft (Beschleunigung/Geschwindigkeit der Scheiben/Achse) und dann soll das System bei der Abwärtsbewegung auf die Geschwindigkeit die ich selber erbracht habe z.B. 10% mehr Geschwindigkeit draufsetzten. Das nennt sich dann Exzentrische Überladung des Muskels und hat erwiesener Maßen sehr große Effekte auf Muskel und Kraftzuwächse. Dazu ist es auch praktisch die erbrachte Kraft und Wiederholungen messen zu lassen. Aufwärtsbewegung ist die Konzentrische Abwärtsbewegung ist die Exzentrische Siehe wie in diesem Video: https://www.youtube.com/watch?v=Zv7edkvQzHE Okay ich werde mich mal einlesen in das Thema Reflex-Lichtschranke :)
Hallo Philipp, ich denke es ist von Vorteil wenn man relativ genau weiß wie weit der Gurt ausgewickelt ist. Damit der Motor später weiß wann er dann Gas geben soll. Danke für deine Beteiligung :)
Jan B. schrieb: > Bei der Aufwärtsbewegung gebe ich nur mit meinen Muskeln eine bestimmte > Kraft (Beschleunigung/Geschwindigkeit der Scheiben/Achse) und dann soll > das System bei der Abwärtsbewegung auf die Geschwindigkeit die ich > selber erbracht habe z.B. 10% mehr Geschwindigkeit draufsetzten. > Das nennt sich dann Exzentrische Überladung des Muskels und hat > erwiesener Maßen sehr große Effekte auf Muskel und Kraftzuwächse. > Dazu ist es auch praktisch die erbrachte Kraft und Wiederholungen messen > zu lassen. Und wenn man eine Umlenkrolle verwendet, kann man daran problemlos die Wickelrichtung feststellen (siehe Video mit den Kniebeugen) Dazu braucht man keinen Absoltgeber. Willst du deinen Gurt millimetergenau ausmessen? In dem Moment, wo sich die Umlenkrolle in die andere Richtung bewegt, wird ja ader Gurt aufgewickelt. Dann kann deinn Motor Gas geben.
STK500-Besitzer schrieb: > Jan B. schrieb: >> Bei der Aufwärtsbewegung gebe ich nur mit meinen Muskeln eine bestimmte >> Kraft (Beschleunigung/Geschwindigkeit der Scheiben/Achse) und dann soll >> das System bei der Abwärtsbewegung auf die Geschwindigkeit die ich >> selber erbracht habe z.B. 10% mehr Geschwindigkeit draufsetzten. >> Das nennt sich dann Exzentrische Überladung des Muskels und hat >> erwiesener Maßen sehr große Effekte auf Muskel und Kraftzuwächse. >> Dazu ist es auch praktisch die erbrachte Kraft und Wiederholungen messen >> zu lassen. > > Und wenn man eine Umlenkrolle verwendet, kann man daran problemlos die > Wickelrichtung feststellen (siehe Video mit den Kniebeugen) > Dazu braucht man keinen Absoltgeber. > Willst du deinen Gurt millimetergenau ausmessen? > > In dem Moment, wo sich die Umlenkrolle in die andere Richtung bewegt, > wird ja ader Gurt aufgewickelt. Dann kann deinn Motor Gas geben. Also würdest du das auch wie Stefan mit einer Reflex-Lichtschranke umsetzen?
> Also würdest du das auch wie Stefan mit einer Reflex-Lichtschranke > umsetzen? Wenn du einen Motor ankoppeln willst dann koenntest du im Prinzip auch einen Motor nehmen der selbst einen Encoder an seiner Achse hat. Ansonsten wuerde ich auch ueber so eine Lichtschranke nachdenken. Was du da vor hast ist im Prinzip alles ziemlich einfach bis du zur Ansteuerung und Regelung des Motor kommst. Ich frage mich uebrigens gerade ob man nicht zum bremsen des Systems einen Schrittmotor verwenden koennte der gleichzeitig auch noch die Information ueber seine Drehzahl liefert. Olaf
Jan B. schrieb: > Also würdest du das auch wie Stefan mit einer Reflex-Lichtschranke > umsetzen? Ja.
STK500-Besitzer schrieb: > Jan B. schrieb: >> Also würdest du das auch wie Stefan mit einer Reflex-Lichtschranke >> umsetzen? > > Ja. nicht mit nur einer. Man muss auch die Drehrichtung bestimmen. Dazu braucht man zwei Lichtschranken - siehe Scollrad einer Maus.
STK500-Besitzer schrieb: > Man muss auch die Drehrichtung bestimmen. Die liefert der Motor im Generatorbetrieb.
Jan0497 schrieb: > Ich bin für alle Gedanken/Hilfe sehr froh und offen für andere Ansätze! > Wenn euch irgendwelche Informationen fehlen gerne schreiben :) Ich hatte in der Firma auch mal die Aufgabe, den Winkel einer Welle zu erfassen. All die Lösungen mit Lichtschranken schieden aus, Gründe dafür, Verschmutzung, Alterung, zu Ungenau, umständliches Händling. Die Lösung war ein Drehwinkel Sensor aus Österreich. Siehe hier, der kam dann zum Einsatz. https://ams.com/documents/20143/36005/AS5601_DS000395_3-00.pdf Ist sehr Preiswert, " wir hatten Stückzahlen > 20K " Ist Zuverlässig, wird z.B. auch oft in Autos verbaut. Schau Dir einfach mal den an. Es gibt von dem Hersteller einiges. Nur der war für meine Anwendung Gut geeignet.
Habt ihr schonmal gesehen was passiert, wenn so ein Motorcontroller durcheinander kommt? Also ich weiß nicht ob ich da meinen Arm reinstecken wollen würde.
Die Drehzahl kannst du über verschieden Verfahren erfassen, Selber nehme ich gern Hall Sensoren. Die können auch die Richtung erfassen, brauchen aber einen Magneten oder einen Zahnkranz. Jan0497 schrieb: > Da ich schon mal eine Achse mit einem Arduino ausgewertet habe > (interrupt) und die Erfahrung gemacht habe, dass es besser ist einen > Absolutdrehgeber zu benutzen, würde ich solch einen nehmen. Absolutgeber brauchst du nur wenn du wissen willst in welcher Stellung deine Achse ist. > Zur Verarbeitung einen Raspberry Pi 4 und vlt die Programmiersprache > Python. Da ist meist Linux drauf, was sog. Echtzeitprobleme erzeugt. Du weißt nie ob dein Programm gerade dann aufgerufen wird wenn ein dein Drehimpuls ankommt. Arduino ist da viel besser geeignet, würde ich für die Versuche bei bleiben. Später weißt du auch viel besser was du brauchst.
Kampenwand schrieb: > Die Lösung war ein Drehwinkel Sensor aus Österreich. So gut das Teil sein mag, für einen Anfänger jenseits von Gut und Böse. Da musst du z.B. I2C abfragen um eine Positionserkennung zu machen die hier unnötig ist. Der TE kann Lochscheibe und Gabellichtschranken nehmen. Das ist für Versuche ausreichend. Die Scheibe und Halter sind im 3D Druck auch schnell gemacht wenn man keine Standardteile nehmen will oder kann.
M. K. schrieb: > Habt ihr schonmal gesehen was passiert, wenn so ein Motorcontroller > durcheinander kommt? Eigensicher muss so was eh sein. Also z.B abschalten wenn die Last zu groß wird. Da würde ich auch keinen Motor nehmen der den Probanden im Fehlerfall in das Motorgehäuse zieht ;-).
So liebe Leute, ich bin bereits sehr Dankbar das ihr soviel zu diesem Projekt beitragt. Da ich es übersichtlicher für euch und mich gestalten wollte, habe ich mal eine Art Lasten/Pflichtenheft erstellt. Die erste Phase ist mir am wichtigsten, wollte aber alles schon so auslegen, dass die Motorgeschichte auch möglich ist. Ich habe in Google Drive eine Tabelle gemacht. https://docs.google.com/document/d/1b2TGYwxE8JyrwBIcYnTVA2zKgGVppaJOw_q_IcRkyGw/edit?usp=sharing
Ohne mir jetzt das Video anzusehen (weil ich keine Lust hab mich die nächsten Wochen mit daraus resultierenden Vorschlägen von yt rumärgern zu müssen) Im Grunde willst Du wissen mit welchem Drehmoment sich die Hantelcheibe im Bezug auf die Stange dreht; richtig? Dabei kann schon ein winziger Motor helfen (die Dinger die in wegwerf elektrorasierern/Zahnbürsten stecken, in Minidrohnen, vielen Spielzeugen und alten Handys (Vibrationsmotor)) Den lässt Du X-mal pro Hantelscheibenumdrehung mitdrehen (Getriebe übersetzung) und hängst an den Zuleitungen eine Last an (ein Widerstand mit 10Ohm oder so) Jetzt ist Experimentieren angesagt fürchte ich; Du misst (bei identischer Übersetzung) welche Spannung der Motor bei einer bestimmten Drehgeschwindigkeit erzeugt, zB indem Du ihn mit einem Anderen Motor antreibst. (die Tabelle musst Du dann speichern falls die WErte nichtlinear sind sehr genau, falls sie weitestgehend linear sind reichen wenige Kennzahlen.) Am Trainingsgerät kannst Du dann Zeit und Geschwindigkeit messen, daraus resultiert die Geschwindigkeitsänderung pro Zeitintervall aka Beschleunigung. bei bekannter Schwungmasse (Hantelscheibe) ergibt sich daraus der Drehmoment. Über den Widerstand der als "Bremse" dient (von lächerlich kleiner Wirkung) kannst Du den Spannungsabfall messen und damit die Stromstärke ablesen, die hilft dann den Drehmomentswert zu plausibilisieren. Derartige Messung ist niemals perfekt aber sie ist in der Regel konstant. also selbst wenn der absolute Wert des Drehmoments nicht hundertprozentig korrekt ist, so ist das Trainingsniveau (Änderung des Drehmoments nach XYZ Trainings) dennoch relativ gut abzulesen (solange der Motor mitmacht und nicht durchbrennt natürlich nur) So arbeiten viele Dynamometer im RC Bau (und das Recht zuverlässig) so zuverlässig sogar dass dasselbe Prinzip auch bei Vollwertigen Auto-Dynamometern (in durchaus anderem Massstab) zur Verwendung kommt. Am Ende kannst Du geleistete Arbeit (in Watt und damit Joule) und zB benötigte Kalorien ausgeben/speichern/etc. 'sid PS und es ist billig zu produzieren, leicht zu beschaffen -selbst in Kleinstmengen- und doch bei vernünftigem Aufbau verblüffend akkurat.
Jan B. schrieb: > habe ich mal eine Art Lasten/Pflichtenheft erstellt. Schreib das nach Möglichkeit so das es auch verständlich ist. Ein Pflichtenheft erklärt/definiert auch. Such dir mal Vorlagen. Je mehr du in diese Planung investierst desto einfacher wird es später. Dann gibt min. 2 Ebenen. Eine ist die Funktion die beschreibt was passieren soll, die 2. die technische Umsetzung und deren möglichen Varianten. Hilfreich ist es die Anforderungen in Teile zu zerlegen und diese dann technisch zu lösen Wenn du z.B. eine %uale Kraft addieren möchtest dann muss diese Kraft auch gemessen werden. Das ist gar nicht so einfach und dann ist es individuell verschieden. Einfacher ist der Anwender stellt Sie einfach ein z.B. per Poti über einen Trainingsplan. Das würde eine Menge Mess- und Regelaufwand einsparen. Das einfachste daran ist die Wegmessung. Wenn von zwei Seiten an dem ganzen gezogen wird dann werden Algorithmen, Meß-/ Visualisierungsaufwand und Versuchsreihen mit verschiedenen Probanden schnell komplex. Das würde ich mit einem PC entwickeln und später das Zielsystem aussuchen. Wenn man weiß was man braucht, als one shot wird das eh nicht zu designen sein.
Ich habe mir mal die Mühe gemacht alles zusammen zu schreiben. Falls euch das Projekt im Detail interessiert. Wenn euch nur die konkrete Ziele/Umsetzung zur Elektronik interessiert, geht es ab Kapitel 3 los. Ich hoffe mit diesem Input könnt ihr mir mit meinem Anliegen besser helfen. Bei Fragen einfach schreiben :) https://docs.google.com/document/d/1y1Ps2lGMBlGfHp_X861jGAQr7EngHwYD4h-WHcQWqrM/edit?usp=sharing
Die Dynamik des Systems erfasst man über die Masse der Scheibe und deren Durchmesser, sowie den zugehörigen Beschleunigungsprofilen. Da die Hauptkomponenten "Konstanten" sind, bleiben nur noch die Beschleunigung bzw. die Drehzahl zu messen. Alles kann man aber aus der aktuellen Drehzahl ableiten. Die Zeiten kann Dir jede Prozessoruhr dazu liefern. Notfalls eine RTC, wenn es die Kunden mit Datum und Uhrzeit haben wollen. Also ist alles, was Du brauchst, sind ein paar Markierungen auf dem Schwungrad (mit möglichst gleichem Abstand) und eine Reflexlichtschranke. Im Übrigen: Die Anzahl der Markierungen bestimmen die Auflösung der Geschwindigkeits-/Beschleunigungsprofile. Zwecks Organisation könnten noch ein Taster/Schalter nötig werden, um dem Grübler zu sagen: Jetzt geht es rund und die Pause dazwischen ist Ruhezeit und nicht der Benutzerwechsel bzw. Standzeit. In der Luxusausführung können noch ein Display und ein paar Eingabemöglichkeiten anfallen. Es wird kein Hochleistungsrechner benötigt, da das Abfragen einer Lichtschranke, einen Rechner kaum belastet und alles andere von Konstanten abgeleitet werden kann. Falls Du auf Salami stehst: Du willst das Gerät auch noch von Grönland aus steuern. Dann wird das volle Programm aus Ethernit, Bildverarbeitung und sonstigem fällig. Eventuell auch eine Schnittstelle zu einer "Kundendatenbank" plus Druckerei und Abrechnungsterminal.
Sebastian S. schrieb: > Du willst das Gerät auch noch von Grönland aus steuern. > Dann wird das volle Programm aus Ethernit, Bildverarbeitung > und sonstigem fällig. Eventuell auch eine Schnittstelle zu einer > "Kundendatenbank" plus Druckerei und Abrechnungsterminal. Oh bitte, bringe ihn nicht auf solche Ideen. Ich finde schon schlimm genug, dass es Zahnbürsten und Kochtöpfe mit Internet gibt.
Ach so, bevor es unter den Tisch plumpst! Eine vernünftige Teilung, auf einem bestehenden System ist ganz einfach: Mit einem einfachen Zeichenprogramm einen Kreis, der etwas kleiner ist als Deine Scheibe, zeichnen. Auf diesem Kreis/Radius die Markierungen, in gewünschtem Abstand, zeichnen. Der Abstand bestimmt die spätere Auflösung. Aber Achtung: Werden die "Striche" zu schmal, so leidet der Kontrast und Reflexlichtschranken haben keine beliebig feine Auflösung. Den Kreis ausschneiden und ein ordentliches Loch lassen. Je nach Konstruktion halbieren (wegen der Störenden Teile). Jetzt das Ganze auf die Rückseite der Scheibe kleben. War der Kreis nur minimal kleiner wie die Scheibe, ist die Zentrierung auch relativ einfach. Hinten ist das Teil ist sogar geschützt. Außerdem kann, am Gerät, hinter der Scheibe, die Lichtschranke montiert werden und ist somit auch aus dem Weg. Oder so.
Noch was! Falls Du das Teil belasten bzw. bremsen willst, rede mal mit Eddy Wirbelstrom. Eine einfache Scheibe und ein definierter Strom durch eine Spule könnten dabei ganz hilfreich sein.
Sebastian S. schrieb: > Falls Du das Teil belasten bzw. bremsen willst Ich habe ihn so verstanden, dass er darüber hinaus in die entgegen gesetzte Richtung beschleunigen will.
Angehängte Dateien:
-

Lochscheibe.PNG
490 KB
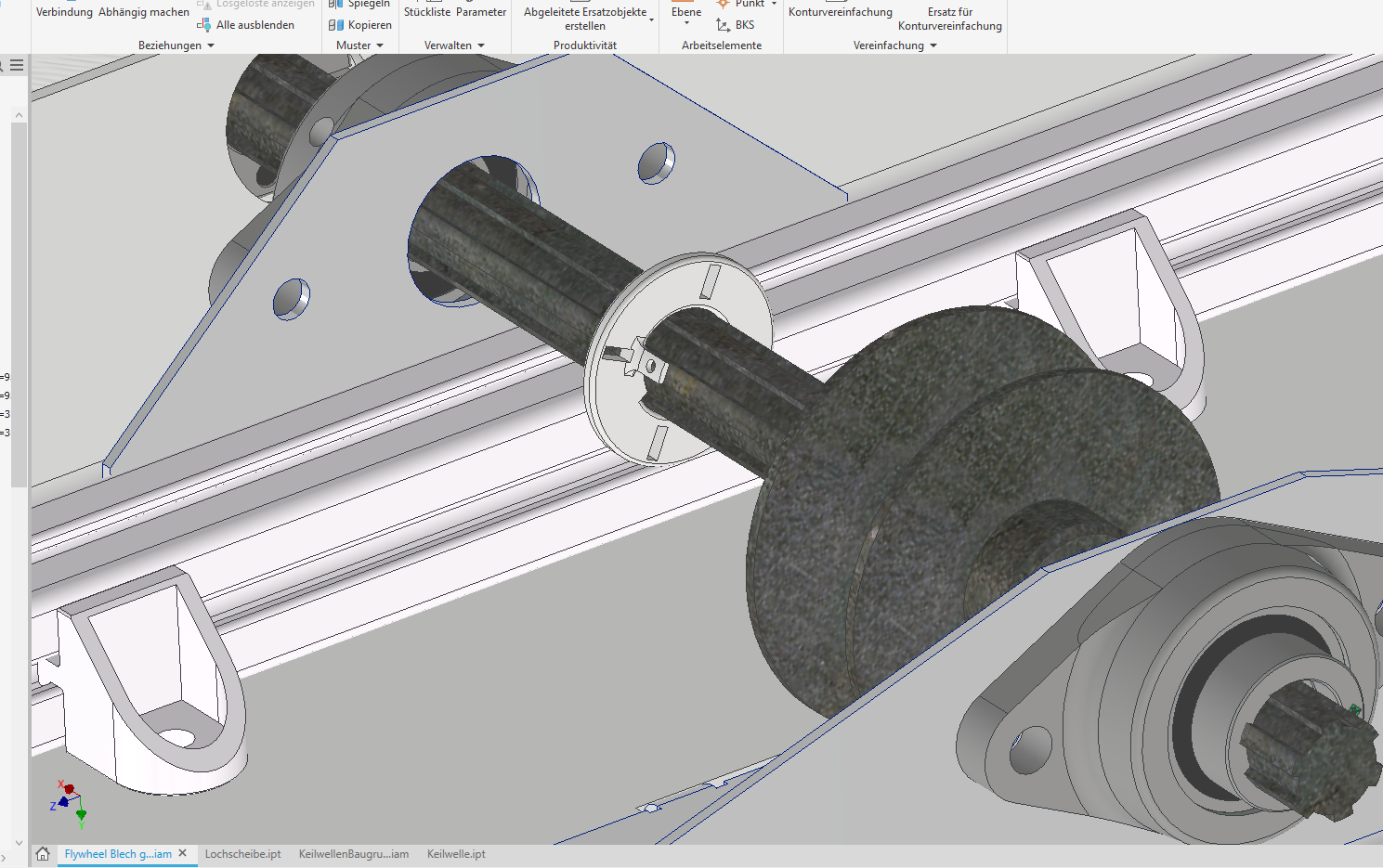
Die Messungen sollten im ersten Schritt auf ein Display dargestellt werden. Ich habe vorhin schon mal zwei Lichtschranken gekauft. Den JOY-IT Speedsensor LM393. Ich hoffe die taugen etwas. Eine Lochscheibe habe ich mir gerade gezeichnet. Die werde ich nachher mal mit meinem 3D-Drucker drucken. Das ganze sieht dann folgend (siehe Anhang) montiert aus. Ich habe mal eine Auflösung von vier pro Umdrehung eingezeichnet. Ja ich möchte in der letzten Phase einen Motor zur extra Kraft in der exzentrischen Phase benutzen, damit es für den Trainierenden extra schwer wird.
Stefan ⛄ F. schrieb: > Sebastian S. schrieb: >> Falls Du das Teil belasten bzw. bremsen willst > > Ich habe ihn so verstanden, dass er darüber hinaus in die entgegen > gesetzte Richtung beschleunigen will. genau Stefan! Ich messe die Energie mit Hilfe der Sensorik die der Trainierende hineinsteckt und möchte dann noch das der Motor in der anderen Hälfte der Bewegung noch mehr Energie hinzufügt.
@Stefan >Ich habe ihn so verstanden, dass er darüber hinaus in die entgegen >gesetzte Richtung beschleunigen will. Das bedeutet aber: Einen genau definiert, regelbaren Motor, mit zugehöriger Energieversorgung. Ist auch sensorisch (Torsion) und Sicherheitstechnisch, nicht ganz ohne. Zieht der dann im falschen Moment, so verlässt der Kombattant eventuell den Raum auf einer Trage und lernt den nächsten Orthopäden intensivst kennen. Ist das nicht gewollt, so ist das sehr unangenehm. Eine Wirbelstrombremse ist dabei viel genügsamer.
Sebastian S. schrieb: > @Stefan >>Ich habe ihn so verstanden, dass er darüber hinaus in die entgegen >>gesetzte Richtung beschleunigen will. > > Das bedeutet aber: Einen genau definiert, regelbaren Motor, mit > zugehöriger Energieversorgung. Ist auch sensorisch (Torsion) und > Sicherheitstechnisch, nicht ganz ohne. Zieht der dann im falschen > Moment, so verlässt der Kombattant eventuell den Raum auf einer Trage > und lernt den nächsten Orthopäden intensivst kennen. Ist das nicht > gewollt, so ist das sehr unangenehm. > Eine Wirbelstrombremse ist dabei viel genügsamer. Ja das ganze ist ohne weitere Sicherheitsüberlegungen bei z.B. der Kniebeuge nicht umsetzbar. Allerdings gibt es auch Übungen bei der man selbst sehr schnell aussteigen kann. Bei einem Bizepscurl kann man einfach den Griff los lassen. Was genau meinst du mit einer Wirbelstrombremse? Falls etwas schief läuft, dass das System bremst?
Stefan ⛄ F. schrieb: > Sebastian S. schrieb: >> Du willst das Gerät auch noch von Grönland aus steuern. >> Dann wird das volle Programm aus Ethernit, Bildverarbeitung >> und sonstigem fällig. Eventuell auch eine Schnittstelle zu einer >> "Kundendatenbank" plus Druckerei und Abrechnungsterminal. Das lustige ist, dass sowas heute jedes Skriptkiddie mit Arduino/RPI umsetzen kann wärend die alten Hasen hier im Forum mit Assembler und C auf dem AVR über ein LCD-Display nicht hinaus kommen.
Wenn man den Sicherheitsgedanken außer acht lässt kann man das schon machen. Ein kleiner synchron Motor und ein Frequenzumrichter. Drehmoment und Geschwindigkeit auf ein allgemeines Maximum begrenzt. Dann müsste man die 2 Endlagen teachen. Ein kleines Anwendungsprogramm zieht dann mit dem angegebenen Drehmoment bis zur unteren Lage. Der Anwender braucht also mehr Kraft als das eingestellte Drehmoment um die Stange bis in die obere Lage zu ziehen. Über die Strecke unten nach oben müsste man das Drehmoment dann vielleicht etwas verschleifen um einen schönen Übergang zu bekommen. Aber was ist da der genaue Unterschied zu einer Stange die mit Terra Bänder am Boden festgebunden ist?
Ein großer Vorteil von einem Massenträgheits Gerät ist das man die exzentrische Phase überladen kann. Das kann man mit Bändern nicht wirklich machen und mit Bändern ernsthaft trainieren macht kein Spaß. Man kann exzentrisches Training auch mit Langhanteln machen. Ist aber praktisch zu umständlich, da man unten das Gewicht verringern muss, damit man es wieder hoch bekommt und dann oben wieder mehr Gewicht auf die Stange laden. Das halt nach jeder Wiederholung zu machen ist unrealistisch. Der Muskel ist stärker in der Phase nach unten, als in der Phase nach oben. Diese Variante hätte aber viele Vorteile für Muskel-Kraftwachstum und dies ist mit einem Flywheel besser umzusetzen.
Das Drehmoment das zusätzlich auf die Kraft die der Trainierende selbst erzeugt, sollte auch nicht mehr als 10-25% sein. Also das kann man schon mal begrenzen.
Jan B. schrieb: > Ich habe mir mal die Mühe gemacht alles zusammen zu schreiben. > Falls euch das Projekt im Detail interessiert. Das sieht gut aus, was mir fehlt ist ein Diagramm für die Kräfte und die Motorunterstützung. Nur der Text ist für Laien wie mich zu wenig. Was ich nicht machen würde ist die Lager nur mit den Schrauben zu halten. Da hast due eine starke Wechsellast auf den Bolzen. Das löst und verkantet schnell. Evtl die Lager in Aussparungen setzen und mit den Schrauben nur fixieren. > Ja ich möchte in der letzten Phase einen Motor zur extra Kraft in der > exzentrischen Phase benutzen, damit es für den Trainierenden extra > schwer wird. Darum scheint es zu gehen, erst mal zur Funktion bringen und testen. Sicherheitsapekte kommen später. Karl schrieb: > Das lustige ist, dass sowas heute jedes Skriptkiddie mit Arduino/RPI > umsetzen kann wärend Eine typische Nullaussage, so hilfreich wie Sand im Kaffee. Arduino ist übrigens C ähnlich.
Toby P. schrieb: > Das sieht gut aus, was mir fehlt ist ein Diagramm für die Kräfte und die > Motorunterstützung. Nur der Text ist für Laien wie mich zu wenig. > > Was ich nicht machen würde ist die Lager nur mit den Schrauben zu > halten. Da hast due eine starke Wechsellast auf den Bolzen. Das löst und > verkantet schnell. Evtl die Lager in Aussparungen setzen und mit den > Schrauben nur fixieren. > >> Ja ich möchte in der letzten Phase einen Motor zur extra Kraft in der >> exzentrischen Phase benutzen, damit es für den Trainierenden extra >> schwer wird. > Ich habe mal noch ein Bild der Plattform und ein Trainierenden eingezeichnet. Dort habe ich auch die wichtigen Komponenten eingezeichnet und die wirkenden Kräfte. Das ganze ist im Kapitel 2. Funktionsbeschreibungen--> Erklärung der wirkenden Kräfte/Phasen Zu der Befestigung der Lager habe ich keine bedenken, da ich das ganze schon bei anderen Produkten gesehen habe und ich ja schon daheim eins gebaut hab. Das funktioniert einwandfrei.
Jan B. schrieb: > Ich habe mal noch ein Bild der Plattform und ein Trainierenden > eingezeichnet. Dort habe ich auch die wichtigen Komponenten > eingezeichnet und die wirkenden Kräfte. Das verstehe ich besser, evtl. noch ein Kraft Zeit Diagramm dazu. Gelenkposition/Muskelkontraktion wären auch sinnvoll. Vielleicht auch den link noch mal reinstellen, sonst ist der zu weit weg. > Zu der Befestigung der Lager habe ich keine bedenken, da ich das ganze > schon bei anderen Produkten gesehen habe und ich ja schon daheim eins > gebaut hab. Das funktioniert einwandfrei. As you like, wenn's läuft. Meine denke ist aus dem Maschinenbau, da wirken halt andere Kräfte.
Karl schrieb: > Jan B. schrieb: >> Angehängte Dateien: > > Mit was für einem Programm ist das gezeichnet? Autodesk Inventor Toby P. schrieb: > Jan B. schrieb: >> Ich habe mal noch ein Bild der Plattform und ein Trainierenden >> eingezeichnet. Dort habe ich auch die wichtigen Komponenten >> eingezeichnet und die wirkenden Kräfte. > > Das verstehe ich besser, evtl. noch ein Kraft Zeit Diagramm dazu. > Gelenkposition/Muskelkontraktion wären auch sinnvoll. > > Vielleicht auch den link noch mal reinstellen, sonst ist der zu weit > weg. > >> Zu der Befestigung der Lager habe ich keine bedenken, da ich das ganze >> schon bei anderen Produkten gesehen habe und ich ja schon daheim eins >> gebaut hab. Das funktioniert einwandfrei. > > As you like, wenn's läuft. Meine denke ist aus dem Maschinenbau, da > wirken halt andere Kräfte. Link: https://docs.google.com/document/d/1y1Ps2lGMBlGfHp_X861jGAQr7EngHwYD4h-WHcQWqrM/edit?usp=sharing Gelenkposition und Muskelkontraktion ist halt bei jeder Übung verschieden. Das ist nichts spezielles von diesem Gerät. Ich habe das ganze meinem Vater gezeigt, der ist Maschinenbauingenieur und er meinte das reicht bei der Belastung. Wenn nicht ist das auch schnell behoben, aber bin da eigentlich zuversichtlich, dass es bei dem neuen Gerät auch hält. Morgen kommen die beiden Gabellichtschranken. Werde mir diese Woche noch ein Oszilloskop bestellen damit ich auch etwas messen kann :D
Bin gerade am überlegen und suchen nach einem Drehzahlsensor der Geschwindigkeit/Pulse und Drehrichtung in einem Gehäuse hat. Falls ihr Tipps habt wäre ich dankbar. Vielleicht kann ich dadurch schon kommende Schwierigkeiten beim Signal verhindern. Mein Oszi/Labornetzteil/Generator kommt die Tage dann kann ich die Signal usw. auch richtig anschauen.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.