Hallo zusammen, ich versuche momentan mit matlab aus Sensordaten den Winkelverlauf für die Drehung um die Z-Achse herauszubekommen. Ich habe folgende Sensorinformationen: - Zeit: t - Beschleunigungsdaten: ax, ay und az - Drehraten: qw, qx, qy, qz Mein bisheriges Programm sieht gekürzt folgendermaßen aus: % Einlesen der Daten xxx %% Quaternion bilden quat = quaternion(qw,qx,qy,qz); Q = compact(quat); % als Nx4 Matrix %% Drehung um die Z-Achse drehax = [0, 0, 1]; vec = quatrotate(quatinv(Q), drehax); vec = atan2d(vec(:,1), vec(:,2)); plot(t, vec) Außerdem habe ich eine Simulation erstellt, die die Bewegung sehr gut abbildet. (Siehe Anhang) Dabei habe ich nur die Drehraten genutzt. Jetzt bin ich mir bei der Auswertung der Dateien allerdings nicht mehr sicher, ob es der richtige Weg ist, um die Drehung um die Z-Achse darzustellen, weil das Ergebnis der Plots nicht dem entspricht was ich mir im vorhinein erhofft hatte. Reichen die Quaternionen aus oder benötige ich dafür noch die Beschleunigungsdaten und weitere Integrationen? über einen Tipp würde ich mich sehr freuen! Viele Grüsse Sven
Wenn Du aus einer Drehrate eine Drehung berechnen willst - egal ob Quaternionen, Eulerwinkel oder natürliche Koordinaten ( = direction cosinus) - wirst Du in irgendeiner Form integrieren müssen. Dabei entsteht auch eine unvermeidbare Drift. Am einfachsten geht das Integrieren in natürlichen Koordinaten. Sven schrieb: > vec = quatrotate(quatinv(Q), drehax); Damit drehst Du das Koordinatensytem um Körper um die Z-Achse. Damit hast Du nicht den Drehwinkel. Du brauchst die Projektion der Drehung auf die Z-Achse. Beim konkreten Matlab-Problem kann ich nichts sagen. Ich habe nie die aerospace-Toolbox besessen oder genutzt. Ich nehme an, dass "quad2angle" oder "quad2dcm" Deine Freunde sind.
Angehängte Dateien:
-

Test.png
20 KB -

Originaldaten.png
33 KB
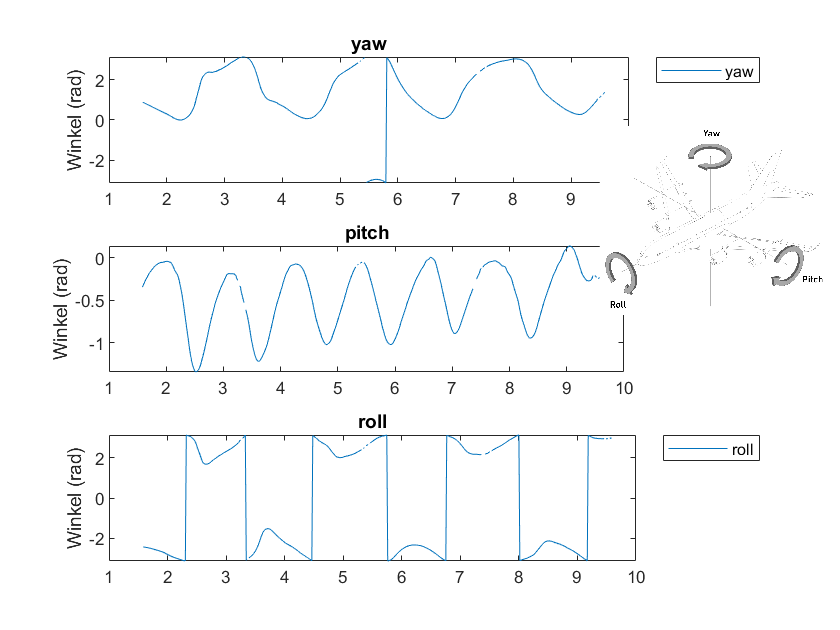
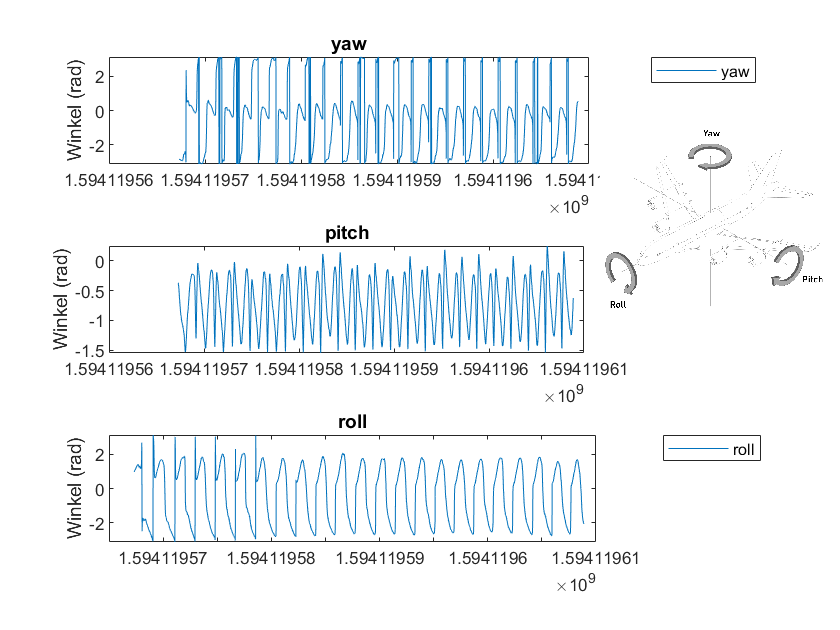
Danke für die schnelle Antwort. In der Tat habe ich einen weiteren Kurzcode mit Quat2angle geschrieben, der mir für meine Testdaten ganz gute Ergebnisse liefert. Allerdings sind die Plots der originalen Ergebnisse durchsäht mit Sprüngen, wie man im Anhang sehen kann. Hat dafür jemand eine Erklärung woran das liegen könnte? Eigentlich sind es nahezu die gleichen Bewegung...
Sven schrieb: > Allerdings > sind die Plots der originalen Ergebnisse durchsäht mit Sprüngen, wie man > im Anhang sehen kann. Hat dafür jemand eine Erklärung woran das liegen > könnte? Jetzt interessiert mich aber doch, in welchem Schuljahr mit Matlab und Quaternionen herumgespielt wird. Und in welchem die Tatsache, dass -180° = +180° entspricht, behandelt wird.
Es ist ein Uniprojekt mit Matlabneulingen. Ja, diese Sprünge sind ja das Problem, aber ich finde leider keine Lösung, um das Problem zu umgehen. Eigentlich hatte ich extra auf Quaternionen gesetzt, um den Gimbal Lock bei den Euler Winkeln zu umgehen. Gibt es da einen Trick? Einfach alles in Betrag nehmen, würde ja auch die Daten verfälschen.
Sprünge in der Winkel-Interpretation der Rotation sind kein Gimbal-Lock. Sie sind einfach nur ein Interpretationsfehler. Welcher Studiengang ist es denn? Momentan gehe ich davon aus, dass die korrekte Interpretation der Winkeldaten eine Fingerübung ist, die man einfach mal gemacht haben sollte.
Diese Sprünge sind ja nur scheinbar da. Das liegt eben an der Wahl der RPY-Koordinaten. Z. B. solltest du sehen, dass die Komponenten der Quaternionen nicht springen. Falls doch, dann ist irgendwas faul. Wenn du dir einen Körper oder eine Rotationsmatrix mit deinen Daten visualisierst (also animiert im Zeitablauf), dann solltest du sehen, dass die Rotationen nicht springen. Wie so oft: wenn man etwas nicht gut visualisiert, ist es unfassbar schwer, es zu verstehen.
Es ist ein Ingenieurwissenschaftlicher Studiengang und es soll eine Bewegung von einem Paddel analysiert werden. Die Interpretation im Testfile ist kein Problem. Das kann ich nachvollziehen, aber mit den Originaldaten zerbreche ich mir den Kopf und komme nicht von der Stelle. Hast du ein ähnliches Problem schon mal bearbeitet?
Sven schrieb: > Es ist ein Ingenieurwissenschaftlicher Studiengang und es soll eine > Bewegung von einem Paddel analysiert werden. Dann bleibe ich bei der obigen Aussage, Walter T. schrieb: > [...], dass die > korrekte Interpretation der Winkeldaten eine Fingerübung ist, die man > einfach mal gemacht haben sollte. Sven schrieb: > [...] aber mit den Originaldaten zerbreche ich mir den Kopf > und komme nicht von der Stelle. Das schöne an Matlab ist: Man kann damit hervorragend seine Daten darstellen. Auch animiert. Deine Freunde sind plot3(), quiver3(), patch(). Wenn man nicht weiterkommt, ist das ein sinnvoller Zwischenschritt, um Einsicht in die Daten zu bekommen. Wenn man bedenkt, dass die Richtungskosinusmatrix ein normalisiertes Dreibein ist, ist eine animierte Darstellung der Drehung ein Kinderspiel (wurde ja auch schon im Eröffnungsposting gemacht). Sven schrieb: > Hast du ein ähnliches Problem schon mal > bearbeitet? Kann man so sagen.
Hallo, ohne einen fixen Referenzpunkt, wie z.B. ein Magnetsensor, der das Erdmagnetfeld misst, wirst du um den Yaw Winkel (Hochachse) kein genaues Ergebnis bekommen, da die Integration deiner Drehrate den Wert driften lässt und es keine Gravitationskomponente für den Beschleunigungssensor gibt, die das korrigieren könnte. Mit einem gut offset-getrimmten Gyroskop (Automtive Grade) komme ich selsbt auf einen drift von einigen Grad pro Stunde (Die Drehung der Erdachse ist korrigiert, bevor jemand meckert). Aber auch das driftet und wird weglaufen. Wenn du nach einem guten AHRS Algorithmus suchst, kann ich dir den Madgwick-Algorithmus empfehlen: https://x-io.co.uk/open-source-imu-and-ahrs-algorithms/ Dieser ist open source und recht gut beschrieben. Ebenso gibt es C Code, der auch funktioniert. Du kannst diesen Algorithmus auch mit einem Magnetfeldsensor nutzen. Dann bekommt man auch ein gutes Ergebnis in allen 3 Eulerwinkeln.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.