Moin! Ich habe seit einiger Zeit ein kleines privates Wetterstationsprojekt, wie es so viele gibt. Die meisten der Daten kann ich einfach und gut auslesen (Temperatur, Feuchte, Luftdruck, Wind, Böen, ...), derzeit scheitere ich jedoch am Windrichtungs"messer". Kurz zum Aufbau: Im rotierenden Teil des Windrichtungsmessers befindet sich ein Neodymmagnet, welcher 8 Reedschalter betätigt. Zu 99,99% ist nur ein Reedschalter betätigt. Die Reedschalter werden mit VCC versorgt, in Serie ist je ein anderer R geschaltet. Richtung: R_M N: 33 kOhm NO: 64,8 kOhm O: 120 kOhm SO: 16 kOhm S: 3,9 kOhm SW: 2,21 kOhm W: 1 kOhm NW: 8,15 kOhm Ich habe diese Widerstände mittels eines Spannungsteilers mit einem 9k1 Ohm R auf GND gelegt. VCC | [R_M] | |------ Analog In | [R2] | GND Der Analog-Input ist ein 12bit ADC, also 0 bis 4095. Das funktioniert soweit gut - ich bekomme Messwerte, die ich einer Richtung zuordnen kann. Nun wackelt der Windrichtungsmesser aber wie der Schwanz eines freudigen Hundes, innerhalb von 1 Sekunde habe ich also gern mal von SW über W bis NW alles abgedeckt an Werten. Wie stelle ich am schlausten eine Auswertung an, damit ich sagen kann: In den letzten X Minuten wehte der Wind vorrangig aus Richtung XZY? PS: Ich bin mit einem ESP32 + Arduino-IDE unterwegs. Gute Programmierkenntnisse vorhanden, wenn auch eher aus anderen (objektorientierten) Sprachen. Gruß Pascal
pascalts schrieb: > Wie stelle ich am schlausten > eine Auswertung an, damit ich sagen kann: In den letzten X Minuten wehte > der Wind vorrangig aus Richtung XZY? Du könntest einen gleitenden Mittelwert über X Minuten rechnen. Das war einfach.
Wenn du dir auf jeden Eingangs-Pin nen Interrupt legst. Dann bei Änderung die Zeit misst seit dem letzten Interrupt Zeit_seit letzter Änderung = millis() - letzteWindänderung; letzteWindänderung = millis(); und das dann in ein Array mit x Einträgen schreibst Dann hast suchst du in dem Array nach den Einträgen mit der größten Dauer. Und damit hast du die vorherschende Windrichtung. Kombinieren kannst du das beim ESP32 mit einem Deep-Sleep: Wake aus Interrupt bei Pin Change. Und schon braucht dein ESP deutlich weniger Strom
my2ct schrieb: > Du könntest einen gleitenden Mittelwert über X Minuten rechnen. Oder ein Medianfilter verwenden. n Werte in einem Array ablegen, sortieren und der am häufigsten vorkommende Wert liegt dann in der Mitte. Die gemessenen Werte würde ich in einen Ringpuffer schreiben, den dann in ein zweites Array sortieren und dort auswerten.
Hallo, wie wäre es denn, wenn du das Signal erstmal über ein RC-Glieg "glättest"? Am Ausgang von deinem Spannungsteiler einen 10 KOhm Widerstand und danach einen größeren Kondensator (> 100 µF) gegen GND. Die Spannung an dem Kondensator dann an deinen Analogeingang. Dann hast du allerdings keine Spannungsstufen mehr, sondern ein stufenlosen Verlauf. Je größer der Kondensator, desto träger wird die Anzeige.
HildeK schrieb: > Die gemessenen Werte würde ich in einen Ringpuffer schreiben, den dann > in ein zweites Array sortieren und dort auswerten. Ein gleitender Mittelwert ist da deutlich pflegeleichter. Ein zweites Array und das Sortieren kann man sich sparen und die Auswertung beschränkt sich auf das Addieren von 3 Werten und teilen durch die Anzahl der Messwerte.
Peter O. schrieb: > wie wäre es denn, wenn du das Signal erstmal über ein RC-Glieg > "glättest"? Damit bekommt man aber nicht den Mittelwert der letzten X Minuten, weil die Sprungantwort des Filters dafür sorgt, das alte Messwerte mit geringerem Gewicht in das Ergebnis eingehen, als neue.
my2ct schrieb: > Ein gleitender Mittelwert ist da deutlich pflegeleichter. Pflegeleicht ist beides. Und Sortieren ist auf einem µC kein Act. Das Problem ist jedoch, dass die gemessenen Pegel nicht einen linearen Zusammenhang haben entlang der Rosette. Und selbst wenn, spätestens beim Ringschluss des Kreises gibt es dann einen Sprung. Da einen Mittelwert nehmen führt doch zu beliebigen Ergebnissen. So würde mit den oben genannten Zahlen z.B. ein Pendeln zwischen SO und O im Mittel den Wert für Nord ergeben, der zwischen W und NW dann Süd anzeigen ... Deshalb geht m.E. auch der Vorschlag von Peter O. nicht, es ist ja das selbe im analogen Bereich. Mit dem Medianfilter können die Schwankungen wie genannt im Lauf der Abtastperiode herein kommen - also, wie genannt: "SW über W nach NW". Der, der am häufigsten vorkommt liegt dann im Array in der Mitte, zumindest solange die Rosette nicht nur im kompletten Kreis rotiert. Vielleicht liege ich auch falsch und noch besser wäre es, die im (gleitenden) Array auftretenden (evtl. klassifizierten) Werte aus einer Mehrheitsentscheidung als Ergebnis zu nehmen. Klassifizieren deshalb, weil der ADC ja auch schon bestenfalls um nur einige LSB schwankende Werte liefert und man nur 8 Richtungen unterscheiden muss. So ganz trivial ist das Problem nicht.
So ein Filter habe ich mal in C++ realisiert, muss mal suchen. Ein mögliche Lösung wäre: Winkel in komplexe Zahl wandeln, komplexe Zahl filtern, komplexe Zahl wieder in Winkel zurückwandeln.
HildeK schrieb: > Mit dem Medianfilter können die Schwankungen wie genannt im Lauf der > Abtastperiode herein kommen - also, wie genannt: "SW über W nach NW". > Der, der am häufigsten vorkommt liegt dann im Array in der Mitte, > zumindest solange die Rosette nicht nur im kompletten Kreis rotiert. Ich muss mich korrigieren. Das geht auch nicht. Es bleibt nur die Mehrheitsentscheidung aus n klassifizierten Messwerten.
Es wäre eventuell zu klären, warum der Windmesser so schnell unterschiedliche Richtungen anzeigt. Wenn er in einem Verwirbelungsfeld irgendwelcher Gebäude(teile) positioniert ist, dann kann man sich den ganzen Aufwand sparen, denn dann zeigt er nur beliebig falsch an.
Hallo, ich stelle mal folgenden Vorschlag zur Diskussion: Für jede der acht Richtungen gibt es eine Variable. Der Analogwert wird in einem festen Zeitraster ermittelt und mit etwas Toleranz einer Richtung zugeordnet. Nach jeder Messung wird jeder nicht passenden Richtungsvariablen -1 und der passenden 7 addiert. Bei der Addition werden Min-/ Maxgrenzen berücksichtigt. Die Richtungsvariable mit dem grössten Wert entspricht der vorherrschenden Windrichtung. Mit dieser Methode ergibt sich ein kontinuierliches Ergebnis. Durch die Grösse der Grenzen kann man noch eine gewisse Dämpfung einstellen. Evtl. sollte auch noch die Windgeschwindigkeit berücksichtigt werden. Denn gerade bei sehr schwachem Wind wedelt die Wetterfahne stärker. In diesem Fall ist es u.U. besser zum Ergebnis "kein Wind aus keiner Richtung" zu kommen, als aus "kein Wind aus Nord". Gruss Micha
Michael K. schrieb: > Nach jeder Messung wird jeder nicht passenden > Richtungsvariablen -1 und der passenden 7 addiert. Bei der Addition > werden Min-/ Maxgrenzen berücksichtigt. Wie unterscheidest du 'passend' und 'nicht passend'? Wenn du das schon weißt, brauchst du nichts mehr auswerten, oder?
HildeK schrieb: > Michael K. schrieb: >> Nach jeder Messung wird jeder nicht passenden >> Richtungsvariablen -1 und der passenden 7 addiert. Bei der Addition >> werden Min-/ Maxgrenzen berücksichtigt. > > Wie unterscheidest du 'passend' und 'nicht passend'? > Wenn du das schon weißt, brauchst du nichts mehr auswerten, oder? Es gibt acht Richtungsvariablen, je eine für N, NO, O, ... NW und eine ermittelte Richtung aus dem Analogwert, also eine von acht. Die ermittelte Richtung wirkt auf die "passende" die anderen sind die "nicht passenden". Bei jeder Messung kann eine andere Richtung die "passende" sein. Durch die wiederholte, beschriebene Addition sollte die Richtungsvariable aus der der Wind am Häufigsten kam, den grössten Wert haben. Ich hoffe nun ist es verständlicher. Gruss Micha
Michael K. schrieb: > Ich hoffe nun ist es verständlicher. Ja, ok, danke. Mit der zulässigen Maximalgrenze stellst du dann quasi die Filterfrequenz ein. Hört sich gut an. Mein Vorschlag mit 'Mehrheitsentscheidung' ist ähnlich, aber ungefiltert.
HildeK schrieb: > Das Problem ist jedoch, dass die gemessenen Pegel nicht einen linearen > Zusammenhang haben entlang der Rosette. Und selbst wenn, spätestens beim > Ringschluss des Kreises gibt es dann einen Sprung. Da einen Mittelwert > nehmen führt doch zu beliebigen Ergebnissen. Was meinst du mit keinem linearen Zusammenhang? Die Verteilung muss doch symmetrisch sein und dann gibt es auch kein Problem beim Mitteln. Um Problemen mit dem Ringschluss aus dem Weg zu gehen, sollte man die Messwerte tunlichst so verschieben, dass sie nicht um den 360°-0° Spung liegen, i.e. die Modulo-360° raus nehmen. Dann klappt das auch mit der Mittelung.
my2ct schrieb: > Was meinst du mit keinem linearen Zusammenhang? War falsch ausgedrückt: hätte stetig heißen sollen. Das ist aber bei den o.g. Werten schon mal nicht so. Ich weiß nicht, ob er das anpassen könnte. Wie du den Sprung rausnehmen willst bei 0°/360° verstehe ich nicht ...
Vielleict beschreibe ich ein schon genanntes Verfahren: Es sind acht Readsensoren vorhanden, also maximal 16 Werte (Magnet löst zwei Sensoren aus). Deren Auftreten könnte man doch in einem Array[16] über eine gewisse Zeit summieren. Nach Ablauf der Zeit wird nach dem größten Wert gesucht, die Richtung "gemerkt" und das Array wieder "geleert", damit eine neue Runde beginnen kann.
HildeK schrieb: > Wie du den Sprung rausnehmen willst bei 0°/360° verstehe ich nicht ... Wenn der Wind z.B. grob aus Nord kommt, kannst du vor der Mittelwertbildung zu allen Werten, die kleiner als 180° sind, 360° dazu zählen. Die andere Möglichkeit ist die Winkel als Sinus- und Cosinusanteil darzustellen. Dann gibt es keinen Sprung.
pascalts schrieb: > Zu 99,99% ist > nur ein Reedschalter betätigt. Schon Scheiße. Wenn der Wind mal konstant aus einer ungünstigen Richtung weht, könnten aus den verbleibenden 0,01% auch schnell mal 100% (über den betrachteten Zeitraum) werden. Das sollte doch eigentlich klar sein, oder? Sprich: wenn die prinzielle Möglichkeit besteht, dass zwei Kontakte gleichzeitig betätigt werden, muss man das bereits im Design einplanen. Außerdem ist da noch das Problem, dass es sich letztlich um einen "zyklischen" Messwert handelt. Auch hier ist man sehr gut beraten, das Problem schon beim Schaltungsdesign einzuplanen. Sprich: du hast die Widerstände denkbarst ungünstig bezüglich der Anwendung dimensioniert... Damit bekommst du niemals eine vernünftige Auswertung hin. Nichtmal ich könnte das, gegen die Gesetze der Informatik kann auch ich nämlich nicht anstinken, das sind Naturgesetze... Der Trick ist also, sich die beiden Probleme klarzumachen, das Konzept zu deren Behebung zu finden und die Widerstände entsprechend dieser Lösung zu dimensionieren. Dann wird eine "zeitberuhigte" Auswertung wirklich mit jeden stinknormalen Tiefpaß möglich.
Vor 40...50 Jahren gab es schon Bauvorschläge für eine "elektronische Wetterfahne". Keine Ahnung mehr, ob es in der "Funkschau", oder "Elektor" war. Eine derart blöde Erfassung mit Reedrelais war damals schon indiskutabel. Das geschah optisch mit Codierung im Gray-Code. Wikipedia über den Gray-Code: "Seine Besonderheit besteht darin, dass sich benachbarte Werte um nur ein Bit unterscheiden. Der Vorteil ist, dass kleine Ungenauigkeiten beim Auslesen nicht direkt zu Fehlinformationen führen!" Übergangszustände führen auch nicht zu groben Fehlerfassungen, ... ... Was wohl das Hauptproblem der Reed-Relais-Lösung sein wird. Mit 6 Leitungen erreicht man dabei eine Unterteilung des Kreises in 16 * 22,5°. statt 8 * 45° mit 9 Leitungen. Also nicht nur N-NO-O-..., sondern N-NNO-NO-ONO-O-...
Moin! Oh wow, mit sooo vielen Ideen hatte ich nicht gerechnet, Ich versuche mal allen gerecht zuwerden. @my2ct , @Jefe Ja, Mittelwert habe ich bereits bedacht. Aber unglücklicherweise könnte ich dann aus einer Mischung aus O und S auf einen Wert nahe NO (korrekt) und SO (falsch) kommen. Bin ich persönlich noch nicht glücklich mit. @blue2monster Leider ist nich jeder Pin nach außen geführt. Sonst hätte ich das bereits so gemacht. Ich habe nur 2 Pins und "dazwischen" einen sich ändernden Widerstand. @HildeK Ein Medianfilter klingt gut. Ist als mögliche Lösung akzeptiert und sammelt auch die 0,0001% Fehlmessung raus. @peter_o Möglich, ein zusätzliches RC-Glied hatte ich bisher nicht bedacht, würde ich aber zurückstellen, da es neuen Hardware-Aufwand gibt. @urschmidt Das "wedeln" liegt höchstwahrscheinlich an meinem Budget. Der Windrichtungsmesser kam für wenig Geld aus Asien (ich bin halt Student, Zeit ist eher vorhanden als Geld und was lernen will ich auch). Er befindet sich ca 1,5 m Über einem Dach einer Scheune, die im Umkreis von 50 bis 100m das höchste Gebäude ist. Höher ginge, wäre aber mit Aufwand verbunden. @michael_kpunkt Das gefällt mir auch und kommt zusammen mit dem Vorschlag von @HildeK am meisten. @c-hater "Sprich: du hast die Widerstände denkbarst ungünstig bezüglich der Anwendung dimensioniert..." --> Ich hab die nicht dimensioniert, sondern "wie die Katze im Sack" gekauft. Aber ja, ist unglücklich. Jetzt muss ich aber damit leben. Ich werde mich die Tage mal an ein paar Lösungsansätze setzen und dann berichten. Erstmal vielen Dank an alle die hier beigetragen haben, ihr habt mir wirklich weitergeholfen. Gruß Pascal
pascalts schrieb: > @HildeK > Ein Medianfilter klingt gut. Ist als mögliche Lösung akzeptiert und > sammelt auch die 0,0001% Fehlmessung raus. Nein, das geht leider nicht, ich hatte es ja schon verworfen. Bei deinem genannten Beispiel passt es, bei Windrichtung Ost mit Pendeln zwischen NO und SO leider nicht. Da käme dann NO heraus. Probiere die Variante von Michael K., mir erscheint diese als erfolgversprechend.
Das muss ich überlesen haben, danke. Ich werde jetzt ein Array mit int 16 Feldern bauen und jeweils im Messzeitraum um 1 Hochzählen, wenn ich einen Messwer einem Feld zuordnen kann. Dann muss ich nur noch auswerten, welche Feld den höchsten Wert pro Messzeitraum hat und weiß die vorherrschende Windrichtung. Danke!
pascalts schrieb: > welche Feld den höchsten Wert > pro Messzeitraum hat und weiß die vorherrschende Windrichtung. Wasserdicht ist das auch nicht. Z.B. kann der Wert ständig zwischen NO und NW pendeln, ohne dass der Wert N besonders oft vorkommt. Das lässt sich nur mit einem Algorithmus auswerten, der "weiss" dass N zwischen NO und NW liegt. Georg
So, ich habe mal gebastelt. unsigned int richtung[8] habe ich nur 8 Felder gegeben, damit ich die Fehlmessung "es sind 2 Reedkontakte geschlossen" gleich ausschließe.
1 | void richtungLoggen() { |
2 | unsigned int mess = analogRead(RICHTUNGPIN); |
3 | |
4 | if ((110 < mess) and ( mess < 170)) { richtung[0]+=1; } //ca 140 |
5 | if ((220 < mess) and ( mess < 280)) { richtung[1]+=1; } //ca 250 |
6 | if ((360 < mess) and ( mess < 420)) { richtung[2]+=1; } //ca 390 |
7 | if ((610 < mess) and ( mess < 670)) { richtung[3]+=1; } //ca 640 |
8 | if ((1000 < mess) and ( mess < 1100)) { richtung[4]+=1; } //ca 1050 |
9 | if ((1700 < mess) and ( mess < 1800)) { richtung[5]+=1; } //ca 1750 |
10 | if ((2350 < mess) and ( mess < 2500)) { richtung[6]+=1; } //ca 2400 |
11 | if ((2800 < mess) and ( mess < 3200)) { richtung[7]+=1; } //ca 3000 |
12 | }
|
13 | |
14 | int getRichtung() { |
15 | int maxNr = 0; |
16 | int maxWert = 0; |
17 | // höchsten Wert ermitteln
|
18 | for (int i = 0; i<=7; i++) { |
19 | if (richtung[i]>maxWert) { |
20 | maxWert = richtung[i]; |
21 | maxNr = i; |
22 | }
|
23 | }
|
24 | |
25 | // Array zurücksetzen
|
26 | for (int i = 0; i<=7; i++) { |
27 | richtung[i] = 0; |
28 | }
|
29 | |
30 | return maxNr; |
31 | }
|
Die Funktion richtungLoggen() wird zyklisch aufgerufen. Die Werte habe ich experimentell ermittelt. Die Funktion getRichtung() verwende ich beim Übermitteln der Daten. Sie gibt nur den Array-Index aus, die weitere Zuordnung mach dann mein Frontend. Ich schaue mal, wie sich die Funktionen bewähren und melde mich dann. Gruß Pascal
Ich muss hier nochmal kurz was anmerken. Klar weiß ich, dass die Auswertung noch hinkt. Es könnte richtung[3] und [4] gleich groß sein. Woher soll die Funktion dann wissen, was relevanter ist? Es nimmt halt den ersten Wert. Bis mir was besseres eingefallen ist, muss ich aber wohl damit leben.
pascalts schrieb: > Ich schaue mal, wie sich die Funktionen bewähren und melde mich dann. Ja, wäre schön. Nach dem Vorschlag von Michael K. wäre diese Variante evtl. auch noch interessant:
1 | if ((110 < mess) and ( mess < 170)) |
2 | { richtung[0] += 7; } |
3 | else
|
4 | { richtung[0] -= 1; } |
5 | |
6 | if ((220 < mess) and ( mess < 280)) |
7 | { richtung[1] += 7; } |
8 | else
|
9 | { richtung[1] -= 1; } |
10 | |
11 | // und so weiter
|
Du musst dann noch richtung[i] auch nach unten begrenzen. Je nach Höhe des Begrenzungswerts nach oben sollte eine mehr oder weniger starke Filterung bewirken, ebenso wie die Höhe des Inkrements. Den Wert 7 fürs Inkrement hatte Michael genannt, mir kommt er eher etwas groß vor. Muss man einfach testen ... Und wenn die Zahlen zweier nebeneinander liegender Windrichtungen ähnlich hoch sind (delta < x), dann kannst du das auch als Richtung dazwischen einschätzen. BTW: ich würde mit der Feldreihenfolge von 'richtung' der Reihenfolge auf der Rosette folgen. Die Messwerte tun es ja nicht. pascalts schrieb: > Ich werde jetzt ein Array mit int 16 Feldern bauen Warum 16 Felder? Du hast doch nur 8 Kontakte?
HildeK schrieb: > Warum 16 Felder? Du hast doch nur 8 Kontakte? 16 Felder deshalb, weil es eine mehr theoretische als praktische Change gibt, dass der Magnet 2 Reedkontakte erwischt. Dann hätte man noch 8 "Zwischenwerte". Hier ein Link zum Sensor: https://de.aliexpress.com/item/1000001854801.html?spm=a2g0s.9042311.0.0.4fc54c4dUwbcO2
1 | ---------------------------------- (VCC) |
2 | | | | | | | | | |
3 | | | | | | | | | |
4 | [Ra][Rb][Rc][Rd][Re][Rf][Rg][Rh] |
5 | | | | | | | | | |
6 | | | | | | | | | |
7 | / / / / / / / / (Schalter / Reed a bis h) |
8 | | | | | | | | | |
9 | | | | | | | | | |
10 | ---------------------------------- (zu analog in) |
11 | | |
12 | | |
13 | [R2] |
14 | | |
15 | | |
16 | ---------------------------------- (GND) |
Die bisherigen Daten sehen wesentlich konstanter aus, obwohl ich bisher keine Wichtung ala +7 -1 vornehme. Die Windrichtung deckt sich mit der privaten Wetterstation nicht weit von mir. Die nächsten 24 Stunden lasse ich mal ohne Wichtung durchlaufen, danach mit (vielleicht +3 oder so). Mal sehen wie sich das entwickelt. Gruß Pascal
Ich würde es nicht so kompliziert machen. Nimm doch einen MLX90242ESE-GAA-000-SP gleich programmiert mit Analogausgang (1,65€ bei Mouser). Dazu noch einen PM im Drehpunkt und fertig. Filterung elektronisch über RC am Analogausgang.
pascalts schrieb: > 16 Felder deshalb, weil es eine mehr theoretische als praktische Change > gibt, dass der Magnet 2 Reedkontakte erwischt. Dann hätte man noch 8 > "Zwischenwerte". Da das nach deiner Beschreibung ganz oben nur mit sehr geringer Wahrscheinlichkeit auftreten kann, wird der Wert auch kaum vorkommen. Du hast z.B. knapp 45° Drehbereich in dem ein stabil geschlossenen Kontakt vorhanden ist, aber evtl. nur 1° wenn zwei geschlossen sind. Heißt: dein Richtungszähler wird kaum hoch zählen und du hast kaum eine Chance, den als häufigsten zu finden. Es muss dann schon Windstill sein und die Rosette exakt auf dem Zwischenwert stehen - aber dann gibt es sowieso keine Windrichtung 😀. Daher glaube ich, dass du darauf verzichten kannst. Ich würde eher die Grenzen um Werte für einen geschlossenen Kontakt etwas enger ziehen, so dass der Wert, den zwei nebeneinander liegende gleichzeitig geschlossene Kontakte liefern, ignoriert wird. Zwischenwerte sind auch erreichbar, wenn zwei nebeneinander liegende Windrichtungen ähnlich häufig auftreten, also im Feld dazu den größten und den zweitgrößten Wert suchen. Wenn sie ähnlich hoch sind, dann kann man auf die Richtung dazwischen schließen.
Ich glaube du missverstehst mich. Ich habe mich bereits gegen die 16 Felder entschieden. Ich nutze 8, siehe: Beitrag "Re: Windrichtungsanzeige auswerten" : "unsigned int richtung[8] habe ich nur 8 Felder gegeben, damit ich die Fehlmessung "es sind 2 Reedkontakte geschlossen" gleich ausschließe." Derzeit "unsigned int richtung[8]", weil ich nur "+1" mache, wenn ich später mit Wertung ála +3 & -1 arbeite natürlich "int richtung[8]". Gruß Pascal
Okay, ich hab jetzt zwar Windstille im Moment, aber trotzdem mal die Variante mit Gewichtung noch ausprobiert. Das Ergebnis ist noch eindeutiger.
1 | void richtungLoggen() { |
2 | unsigned int mess = analogRead(RICHTUNGPIN); |
3 | |
4 | if ((110 < mess) and ( mess < 170)) { richtung[0]+=3; } else { richtung[0]-=1; } //ca 140 |
5 | if ((220 < mess) and ( mess < 280)) { richtung[1]+=3; } else { richtung[1]-=1; } //ca 250 |
6 | if ((360 < mess) and ( mess < 420)) { richtung[2]+=3; } else { richtung[2]-=1; } //ca 390 |
7 | if ((610 < mess) and ( mess < 670)) { richtung[3]+=3; } else { richtung[3]-=1; } //ca 640 |
8 | if ((1000 < mess) and ( mess < 1100)) { richtung[4]+=3; } else { richtung[4]-=1; }//ca 1050 |
9 | if ((1700 < mess) and ( mess < 1800)) { richtung[5]+=3; } else { richtung[5]-=1; }//ca 1750 |
10 | if ((2350 < mess) and ( mess < 2500)) { richtung[6]+=3; } else { richtung[6]-=1; }//ca 2400 |
11 | if ((2800 < mess) and ( mess < 3200)) { richtung[7]+=3; } else { richtung[7]-=1; }//ca 3000 |
12 | }
|
+3 und -1 scheint ein guter Ansatz zu sein. Dann sieht es schnell so aus:
1 | 0: -17 |
2 | 1: -17 |
3 | 2: -17 |
4 | 3: -17 |
5 | 4: -17 |
6 | 5: 51 |
7 | 6: -17 |
8 | 7: -17 |
Also wunderbar eindeutig, auch wenn der Richtungsgeber gerade nicht "herumschwänzelt". Ich schreibe morgen nochmal, wenn wir wieder Wind haben ;-) Gruß Pascal
pascalts schrieb: > Also wunderbar eindeutig, auch wenn der Richtungsgeber gerade nicht > "herumschwänzelt". Ich schreibe morgen nochmal, wenn wir wieder Wind > haben ;-) Ja klar, perfekt eindeutig wäre es auch ohne die +3/-1, das ist der Idealfall ohne 'Schwänzeln', interessant ist es mit 'Schwänzeln'! Ich bin gespannt.
pascalts schrieb: > Kurz zum Aufbau: Im rotierenden Teil des Windrichtungsmessers befindet > sich ein Neodymmagnet, welcher 8 Reedschalter betätigt. Zu 99,99% ist > nur ein Reedschalter betätigt Wie machen die das? Kann ich mir nicht vorstellen.
> +3 und -1 scheint ein guter Ansatz zu sein.
Was soll das bringen? Den aktuellen +3 und alle anderen -1 ist das
gleiche, wie den aktuellen +4 und alle anderen +-0. Du zählst also nur
um 4 statt um 1 hoch - das ist alles.
Sortier das Richtungs-Array doch so, dass die Richtungen von Index n und n+1 benachbart sind (45° auseinander) und glätte dann die Werte, z.B.:
1 | for (int i = 0; i<8; i++) { |
2 | int glatt = richtung[(i+7)%8] + 2 * richtung[i] + richtung[(i+1)%8]; |
3 | if (glatt > maxWert) { |
4 | maxWert = glatt; |
5 | maxNr = i; |
6 | }
|
7 | }
|
Vielen Dank für die weiteren guten Ansätze, ich muss euch aber vorerst vertrösten, da ich aus Zeit- und Windmangel noch etwas warten muss.
c-hater schrieb: > Außerdem ist da noch das Problem, dass es sich letztlich um einen > "zyklischen" Messwert handelt. Nö, ist kein Problem. Wenn man weiß wie ein Filter zu programmieren ist, welches diese Zyklizität berücksichtigt. Kann ich ein Beispiel posten, suche es heute Abend noch raus. pascalts schrieb: > Ja, Mittelwert habe ich bereits bedacht. Aber unglücklicherweise könnte > ich dann aus einer Mischung aus O und S auf einen Wert nahe NO (korrekt) > und SO (falsch) kommen. Wenn O und S perfekt im Wechsel kommen, wäre doch SO korrekt? Verstehe ich jetzt nicht. Oder liegt das an deinem Spannungsteiler? mfg mf
Na ist ja beruhigend, dass die Fehlkonstruktion wenigstens bei Windstille funktioniert. Viel Spaß noch!
Angehängte Dateien:
-

winkel_ohm.JPG
32 KB
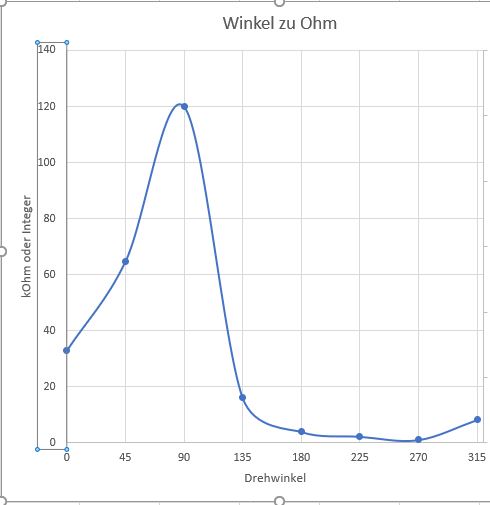
Achim M. schrieb: > Wenn O und S perfekt im Wechsel kommen, wäre doch SO korrekt? Verstehe > ich jetzt nicht. Oder liegt das an deinem Spannungsteiler? Okay, ich versuche es mal grafisch auszudrucken. Im Anhang ein Diagramm, die Punkte stellen die Widerstände dar. 45 Grad hat 64,8 kOhm. 90 Grad hat 120 kOhm. 135 Grad hat 16 kOhm. Angenommen Wir pendeln dauerhaft zwische 135 Grad und 90 Grad, summieren den analogRead()-Wert auf und teilen durch die Anzahl der Messerte. Dann ist es durchaus möglich, dass wir als Durchschnittswert auf den für 64,8 kOhm entsprechenden Integer kommen. Verstehst du nun, warum dies nicht möglich ist?
foobar schrieb: > Was soll das bringen? Den aktuellen +3 und alle anderen -1 ist das > gleiche, wie den aktuellen +4 und alle anderen +-0. Du zählst also nur > um 4 statt um 1 hoch - das ist alles. Ob sich das gleich verhält, hängt davon ab, wie die Auswertung läuft. Weit oben, als diese Variante vorgeschlagen wurde, hat man auch gesagt, dass man den Zähler auf einen MAX_WERT und einen MIN_WERT begrenzt. Den Zähler muss man dann nicht rücksetzen, sondern einfach weiter laufen lassen. Wenn aus der Vergangenheit ein Wert hoch ist oder auf MAX_WERT steht, dann würden die anderen, die ggf. gelegentlich auch mal aufwärts zählen ('schwänzeln') auch langsam aber sicher dem MAX_WERT näher kommen - nach deiner Methode. Subtrahiert man aber bei den anderen einen Wert, dann wird bei einer neuen Windrichtung der alte Spitzenwert langsam kleiner und der neue steigt schnell an. So ergibt sich ein weicher Übergang auf die neue Richtung.
sohalt@gmx.de schrieb: > änder doch die Widerstände an den Reedschaltern Ich habe es nicht nachgerechnet, aber sie scheinen mir durchaus sinnvoll gewählt worden zu sein. Denn so kann man tatsächlich unterscheiden, wenn zwei nebeneinander liegende Reedkontakt geschlossen sind. Das ergibt dann immer einen Spannungswert, der zwischen den Spannungen liegt wenn nur ein geschlossener Kontakt vorhanden ist. Dann kann man durch sinnvolles engeres Wählen der Messgrenzen (z.B. hier: if ((110 < mess) and ( mess < 170)) ) diese Zwischenwerte ausblenden.
Angehängte Dateien:
-

99.99_.PNG
12 KB -

inkl.0.01_.PNG
21 KB
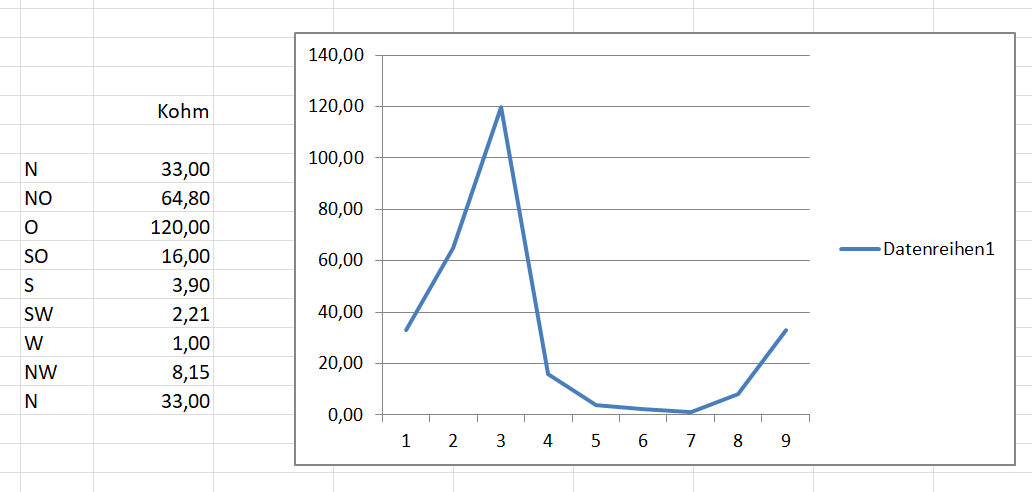
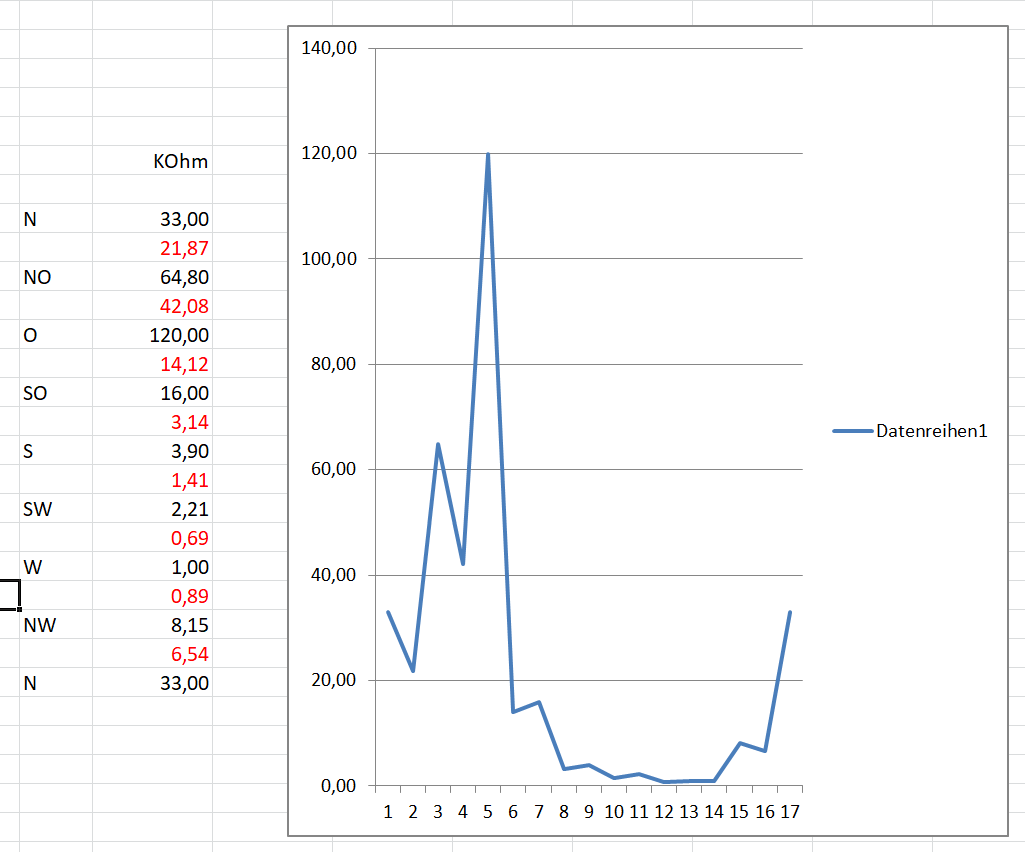
c-hater schrieb: > pascalts schrieb: > >> Zu 99,99% ist >> nur ein Reedschalter betätigt. > > Schon Scheiße. Wenn der Wind mal konstant aus einer ungünstigen Richtung > weht, könnten aus den verbleibenden 0,01% auch schnell mal 100% (über > den betrachteten Zeitraum) werden. Das sollte doch eigentlich klar sein, > oder? genau! hier mal die Widerstandwerte bei 360° Drehung im Vergleich wenn 2 Reed's aktiv sind.
Warum zeichnet ihr Graphen mit kontinuierlichen Linien? Das ist kein Poti! Das suggeriert dass f. Werte zw. Rmin und Rmax IMMER 2 Himmelsrichtungen abzulesen wären. Auf Grund der geschalteten Reed-Kontakte trifft das aber nicht zu. Es gibt nur Messbereiche von Rx+/-(Toleranz, Messfehler), jedoch nie Zwischenwerte.
sohalt@gmx.de schrieb: > änder doch die Widerstände an den Reedschaltern Wie wäre es mit einem Prinzip ähnlich dem Kelvin-Varley-Divider? Also sowas meine ich:
1 | VCC |
2 | | |
3 | 1k |
4 | +---Sw1--, |
5 | 1k | |
6 | +---Sw2--* |
7 | 1k | |
8 | +---Sw3--* |
9 | 1k | |
10 | +---Sw4--* |
11 | 1k | |
12 | +---Sw5--* |
13 | 1k | |
14 | +---Sw6--* |
15 | 1k | |
16 | +---Sw7--* |
17 | 1k | |
18 | +---Sw8--*---ADC |
19 | | | |
20 | +--100k--' |
21 | | |
22 | GND |
"Sw" jeweils ein Reedschalter. Leider hat der eine Präferenz für den untersten "Sw8": # Sw1 und Sw8 gleichzeitig = 0V # Sw7 und Sw8 gleichzeitig = 0V # Sw8 allein = 0V Sonst aber kommt eine Spannung proportional zum Winkel raus. mfg mf
War schon gesagt, komplexe Zahlen mitteln, dann ist man die 'wrap'
Problematik los.
>>>>>>>>>>>>>>
Ein mögliche Lösung wäre: Winkel in komplexe Zahl wandeln, komplexe Zahl
filtern, komplexe Zahl wieder in Winkel zurückwandeln.
<<<<<<
Norden = 0 + j
Nordosten 1/sqrt(2)+ j*1/sqrt(2)
Osten = 1 + 0*j
etc.pp.
Wenn zwei Relais angezogen sind kriegt man das auch verarbeitet:
Norden und Nordosten: cos(pi/4+pi/8)+j*sin(pi/4+pi/8)
Aufsummieren im Zeitfenster, in Winkel zurückwandeln, fertig ist die
Laube.
complex rulez!
Cheers
Detlef
ek13 schrieb: > hier mal die Widerstandwerte bei 360° Drehung im Vergleich wenn 2 Reed's > aktiv sind. Macht ja nichts. In 99,99% der Fälle ist kommt das nicht vor. Und wenn es in 0,01% passiert, dann wird halt die davor erkannte Richtung angezeigt. Wenn einem das zu unschön ist: deine Berechnung zeigt ja, dass man auch die Auswertung mit zwei geschlossenen Reedkontakten eindeutig machen kann: man unterscheidet einfach 16 Richtungen. Ich vermute mal, das Diagramm wird deutlicher, wenn man die geteilte Spannung aufträgt anstatt der Widerstände. Achim M. schrieb: > Leider hat der eine Präferenz für den untersten "Sw8": Linear ist es, wenn nur ein Kontakt geschlossen ist. Bei zwei nebeneinander liegenden auch nicht mehr. Nur noch stetig, aber ist das wichtig? Kann man doch mappen ... Um die Präferenz beim 8. Schalter zu umgehen, hilft da nicht noch ein 1k zwischen SW8 und GND? Gibt dann halt bei 1 und 8 gleichzeitig den Wert 49.8%, etwas nah an 4+5 mit 49%.
HildeK schrieb: > Gibt dann halt bei 1 und 8 gleichzeitig den Wert 49.8%, etwas nah an 4+5 > mit 49% Genau das ist ein Problem bei der "Wrap" Problematik und sollte daher vermieden werden. Keiner will ein z.B. Ergebnis "Süd", wenn die Fahne auf Nord-Nord-West steht. Detlef _. schrieb: > War schon gesagt, komplexe Zahlen mitteln, dann ist man die 'wrap' > Problematik los. Kanonen auf Spatzen. Mit der Abbildung -180° ... 0° ... 179,99...° auf -32768 ... 0 ... 32767 kann man die wrap-Eigenschaft von int16_t oder beliebigem integer-Zahlentyp ausnutzen. Zum Beispiel so:
1 | typedef struct |
2 | {
|
3 | int32_t accu; |
4 | uint8_t shift; |
5 | uint8_t init; |
6 | } cycflt_t; |
7 | |
8 | cycflt_t your_filter = |
9 | {
|
10 | 0u, // int32_t accu; init to zero; overwritten on 1st call |
11 | 4u, // uint8_t shift; filter tau = (2**shift) * T_cycle; e.g. 4u means 16* T_cycle |
12 | 0u // uint8_t init; non-initialized; overwritten on 1st call |
13 | };
|
14 | int16_t cycflt_update(cycflt_t* this, int16_t in) |
15 | {
|
16 | int16_t diff; |
17 | |
18 | // initialized!?
|
19 | if(this->init == 0) |
20 | {
|
21 | // initialize accu on first call
|
22 | this->init = 1u; |
23 | this->accu = ((int32_t)in) << 16u; |
24 | }
|
25 | else
|
26 | {
|
27 | // calculate summation point and update filter accu
|
28 | diff = in - (int16_t)(this->accu >> 16u); |
29 | this->accu += ((int32_t)diff) << ((uint8_t)(16u - shift)); |
30 | }
|
31 | |
32 | return((int16_t)(this->accu >> 16u)); |
33 | }
|
34 | |
35 | // ...im laufenden code dann...
|
36 | your_s16_output = cycflt_update(&your_filter, your_s16_input); |
mfg mf
Wieso macht ihr das so kompliziert. Ein Magnet und Gegengewicht an den Hahn. Die 8 Readkontakte ringförmig um den Hahn ausgerichtet. Sobald ein Readkontakt auslöst weiß ich genau der Wind kommt aus Süden. Ist das der letzte Kontakt der Auslöst und hat der nächste NICHT aus gelöst weiss ich der Wind kommt aus Süden und im einen Bereich von 45° (Bei 8 Sensoren). Die Drehung des Windes kann ich durch den Vergleich es letzten zum vorletzten Sensor ermitteln. Und wenn ich Stromsparen will muss ich halt eine "Interrupt-Schaltung" machen die er Readkontakt auslöst. Im Prinzip muss ich nur X (in den Fall 8 Schalter) abfragen. Das geht sogar mit einen PCF8574 am i2c Bus. ;) Und um Daten zu sparen, protokolliere ich einfach JEDEN Readkontakt-Auslösung. Dann weiß ich folgendes : 1.) Zappelt der Hahn (was man mechanisch unterbinden sollte wenn der auf jede Fliege reagiert. Ich würde ein Kugellager nehmen das hat genug Eigenwiderstand. 2.) Wie hat der Wind gewechselt (Windrichtung von S -> O oder von O -> S) 3.) Wann ist das passiert. Kleines DCF-Modul wäre dann fein.
Achim M. schrieb: > Kanonen auf Spatzen. Mit der Abbildung > -180° ... 0° ... 179,99...° auf > -32768 ... 0 ... 32767 > kann man die wrap-Eigenschaft von int16_t oder beliebigem > integer-Zahlentyp ausnutzen. Zum Beispiel so: Stimmt. Gute Idee. War mir in diesem Zusammenhang nicht bewußt. Cheers Detlef
Schlaumaier schrieb: > 1.) Zappelt der Hahn (was man mechanisch unterbinden sollte wenn der auf > jede Fliege reagiert. Ich würde ein Kugellager nehmen das hat genug > Eigenwiderstand. Ja, und dass soll in der Software unterbunden werden. Und die Vorgabe war, der Windrichtungsmesser ist gekauft und soll nicht umgebaut werden. Du hast erst vorhin angefangen, in diesem Thread zu lesen und dann auch nur 3 Beiträge von hinten?
Detlef _. schrieb: > etc.pp. Nord + Ost gemittelt ergibt 1/2((0 + j) + (0 + -j)) = 0 + 0*j und nicht 1 + 0*j
Schlaumaier schrieb: > Im Prinzip muss ich nur X (in den Fall 8 Schalter) abfragen. Das geht > sogar mit einen PCF8574 am i2c Bus. ;) Um dann 4 Drähte an den Hahn und I2C über einige zig Meter zu führen? Jedem das Seine...
Achim M. schrieb: > Um dann 4 Drähte an den Hahn und I2C über einige zig Meter zu führen? > Jedem das Seine... Quatsch. Der kommt in ein Kasten und ich führe nur die Drähte von den Sensoren zu den Kasten. Wenn ich das richtig mache, ist die max. Länge der Kabel ca. 15-20 cm.
Angehängte Dateien:
-

windrichtung.PNG
38 KB
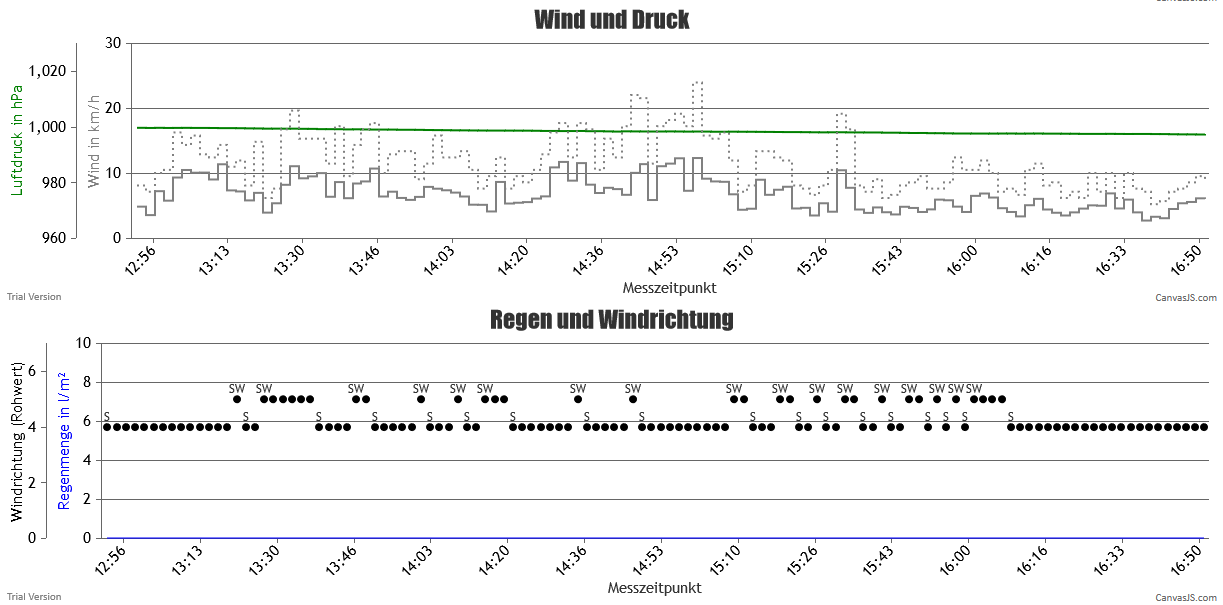
Ohje, es gibt ja hier schon wieder sooo viele Nachrichten. Dabei wollte ich nur sagen, dass ich mit der aktuellen Lösung bereits glücklich bin. In der angehängten Grafik kann man meine (nicht finale!) Auswertung sehen. Jetzt zu den neuen Antworten: @minifloat: Ich kann und möchte die Hardware nicht ändern. SMD-Löten ist nicht so meins. Für ein Projekt, dass man bei 0 beginnt aber eine schöne Idee. @detlef_a Auch wenn ich in Abi und Studium brav alles mit i und j durchgekaut habe, würde ich es im Moment aufgrund des KISS-Prinzips gern vermeiden. Für mich ist das Projekt bis auf Feinarbeit erstmal abgeschlossen. Ich danke für die Hilfe! Die Community hier ist wirklich 1A und man bekommt so wahnsinnig schnell eine (gute, fundierte) Antwort wie nirgendwo. Gruß Pascal
pascalts schrieb: > KISS-Prinzips Komplexe Zahlen sind simpel, obwohl ihr Name Anderes vermuten läßt ;) Alles gut, ging ja auch so. Cheers Detlef
pascalts schrieb: > Für ein Projekt, dass man bei 0 beginnt aber eine schöne Idee. Wenn du den nichtlinearen Zusammenhang ADC-zu-Winkel auflöst (mit der Latte an if-Fensterung) und dann den Winkel in den zyklischen Filter rein wirfst, geht es doch auch, oder?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.