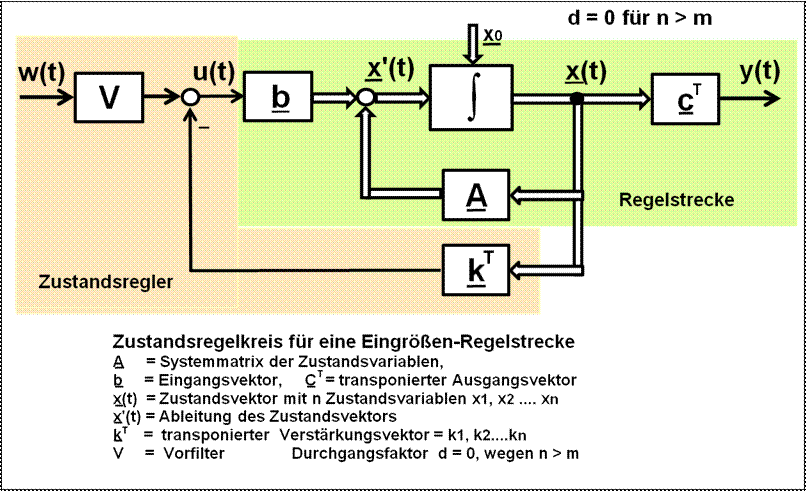
Wenn ich am Eingang w(t) =5 zb anlege dann bekomme ich nachdem ich die Matrix K mit Simulink ermittelte, am Ausgang von k^T ebenfalls eine 5. Was soll das bedeuten? Sollte die 5 nicht an y(t) erscheinen?
Angehängte Dateien:
Sbshsns schrieb: > Wenn ich am Eingang w(t) =5 zb anlege dann bekomme ich nachdem ich die > Matrix K mit Simulink ermittelte, am Ausgang von k^T ebenfalls eine 5. zu welchem Zeitpunkt denn? Das ist ja ein dynamischer Vorgang. In sehr vielen Fällen entspricht der Ausgang y tatsächlich den gemessenen Zuständen, also y= I*x mit C=I (Einheitsmatrix) In diesem Fall ist es ja gewünscht, dass die Rückführung (Ausgang von k) irgendwann dem Referenzsignal w entspricht. Das ist ja schließlich das Ziel der Regelung.
Ergänzung: Und wenn alle Zustände eine Sollwertregelung haben und der oben genannte Fall y=I*x gilt, dann ist auch dieser Vorfilter in der Abbildung einfach 1, denn es muss keine Umrechnung mehr zwischen Führungsgrößen und Zustandsgrößen erfolgen
Sbshsns schrieb: > Wenn ich am Eingang w(t) =5 zb anlege dann bekomme ich nachdem ich die > Matrix K mit Simulink ermittelte, am Ausgang von k^T ebenfalls eine 5. Gut so. Das System folgt also Deiner Führungsgröße. > Was soll das bedeuten? Sollte die 5 nicht an y(t) erscheinen? Nein. Zustandsregler. Du regelst den Zustand nicht den Ausgang. x*kt=5 aber y=ct*x , also abhängig von ct, der Ausgangsmatrix. math rulez Cheers Detlef
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.