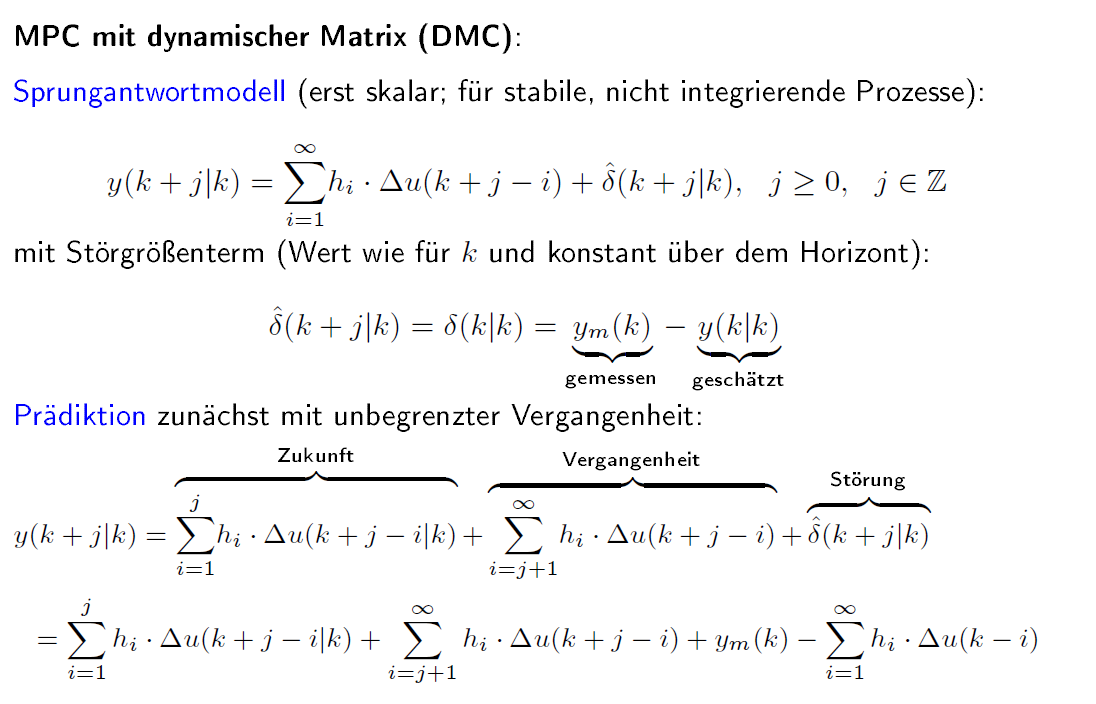
Hallo, ich möchte eine MPC für eine Positionsregelung (Eingrößenregelung) verwenden, die Regelstrecke hat somit logischerweise ein integrierendes Verhalten. Nun ist die Modellierungsart "Sprungantwortmodell" ja deutlich einfacher zu realisieren als ein Zusstandsmodell, aber da wird hier im Skript vermerkt, dass das nicht für integrierende Prozesse geeignet ist. Warum ist das so? Und man könnte ja auch die Sprungantwort der Geschwindigkeit nehmen und eine Integration himterher noch durchführen, oder?
Angehängte Dateien:
-

Unbenannt.PNG
70 KB
leon schrieb: > Warum ist das so? Weil dann die Summe aller hi mal irgendwas ungleich null divergiert. Ist aber gefährliches Halbwissen, kenne MPC nicht gut. Wenn MPC nicht für integrierende Modelle funktionieren würde wäre es ja in der Nützlichkeit sehr eingeschränkt. Cheers Detlef
Detlef _. schrieb: > Weil dann die Summe aller hi mal irgendwas ungleich null divergiert. naja gut, vielleicht in der Theorie. In der Praxis ist die Sprungantwort ja nicht unendlich und die Steigung nimmt aufgrund Reibungseffekten etc. schnell ab.
wobei ich mich entschuldigen muss, das war eben Käse. Wenn man das Stellglied konstant lässt, bleibt natürlich auch die Steigung konstant, aber in der Praxis stellt man das Stellgleid nicht unendlich lange... das meinte ich damit
Weil eine integrierende Strecke auf einen Sprung asymptotisch gegen unendlich geht. Das ist wohl so ziemlich der Inbegriff von nicht-stabil.
und wie könnte ich mein Anwendungsbeispiel mit der Positionsregelung lösen? In der Literatur findet man z.B. MPC in Kombinationmit einem P-Regler in einer Kaskadenstruktur...wäre dann das Sprungantwortmodell verwendbar?
Warum will man MPC verwenden, wenn man noch nicht einmal Lust dazu hat nachzuschauen, ob durch Feedback aus einem I-System ein stabiles System wird? (Ich will an dieser Stelle auch nicht spoilern.) Es ist ja nicht gerade so, als würde eine Regelung durch MPC einfacher.
Es ist ein System mit vielen Nichtlinearitäten und ausserdem wird einer zu jedem Zeitpunkt vorher bekannten Trajektorie nachgefahren, was doch genau der Idealfall für die MPC ist
Das klingt zumindest -je nach Art der Nichtlinearitäten- nicht abwegig.
Ich möchte aber zunächst eine indirekt selbstadaptive Regelung mit Parameterschätzung ausprobieren. Dazu dann ein einfaches Ein/Ausgangsmodell im Frequenzbereich
MPC geht schon mit integrierenden Strecken. In dem Bild vom ersten Post ist nur gemeint, dass die Formel nicht stimmt für I, da kein 'altes' y vorkommt.
Beitrag #6610577 wurde von einem Moderator gelöscht.
Aha. Der Student mag sich nicht einarbeiten, denkt mal mit einem selbstadaptiven Regler beginnen zu muessen. Adaptive Regler waeren zumindest fruher das Steckenpferd der Fachleute wenn sie gegen die Rente gingen, oder etwas vorher. Der Hauptingenieur murmelte etwas von adaptivem Regler, die Geschaeftsleitung nickte ergebenst, die Tuere zum Buero wurde zugezogen, und alle wussten, dass der Typ nicht zu stoeren sei. Standardmaessig kam vor der Rente nichts mehr raus, aber es wurde zumindest probiert.
Pandur S. schrieb: > Aha. Der Student mag sich nicht einarbeiten, denkt mal mit einem > selbstadaptiven Regler beginnen zu muessen. Naja, man muss dazu sagen, dass die bestehende zu optimierende Regelung schon eine "adaptive Regelung" ist, wenn man es so nenen darf. Denn die Regelparameter eines PID-Reglers werden gemäß des im Voraus berechneten Geschwindigkeits-Sollwertes linear angepasst. Also ich habe an der Uni die adaptive Regelung als absoluten Standard kennengelernt und stammt aus den 60er Jahren (ermöglichte u.a. die Mondfahrt)^^
leon schrieb: > Also ich habe an der Uni die adaptive Regelung als absoluten Standard > kennengelernt und stammt aus den 60er Jahren (ermöglichte u.a. die > Mondfahrt)^^ ist kein standard. die meisten regler werden hinreichend robust gemacht. das reicht in den meisten fällen aus.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.