Hi Ich habe hier einen Motor mit Schneckengetriebe, den ich in der Drehzahl steuern möchte. Hier die Daten des Motors die ich besitze: SWF-Schneckengetriebemotor mit ca. 120 Upm, rechts-/linkslaufend, Betrieb an 12V=/ca. 6A, Motor läuft bereits bei 3V an. Nun würde ich gern wissen, welche PWM-Frequenz ich am besten zur ansteuerung wählen sollte, damit der Motor rund läuft. Was für eine Frequenz sollte man wählen? Oder sollte man ein anderes Ansteuerungsverfahren nehmen? Das ganze soll dann mit einem PIC realisiert werden. Ich danke euch für Hinweise und Tipps mfg Schoasch
12V 6A - vermutlich geringe Induktivität. -> was willst du damit machen? mußt du eine hohe Dynamik haben? Wie sieht die Meßwerterfassung aus? verzögerungszeiten? Ich würd schon auf 1k gehen? DArf man die Endstufe hören? Sonst mußt du über 8K gehen. Willst du eine 4Q Endstufe realisieren? Was kann dein PIC?
Ich will den Motor mit einer Seiltrommel verbinden und so eine art kleinen Lastenlift damit bauen. Daraus folgt, dass es keine hohe Dynamik haben muss bzw soll. Also will ich sowieso keine ruckartigen bewegungen durchführen, sondern immer eine schönen runden übergang zwischen den 2 Bewegungsarten. Eigentlich würde es nichts machen, wenn man die endstufe hört(ausser es ist ohrenbetäubend laut ;-)). Was ist eine 4Q-Endstufe? Ist das eine 4Quadranten-Endstufe? Nein das wäre nicht nötig und auch nicht sinvoll, da ja der Motor durch das Schneckengetriebe nie in den Generatorbetrieb kommen kann. Aber ja, ich möchte Rechts- und Linkslauf haben. Dazu will ich aber keine H-Brücke nehmen, sondern einfach mit einem Relais die Drehrichtung "umschalten" und das ganze mit nur einem FET ansteuern. Über die Messwerterfassung habe ich mir noch nicht all zu grosse gedanken gemacht, da ich ja momentan von einer Steuerung und keiner Regelung ausgehe. Interessant wäre eine art Überlastschutz. Die Endpositionen werde ich mit Endschaltern realisieren. Was für eine Messwerterfassung würdest du empfehlen? Der PIC soll die komplette Steuerung übernehmen. Die Drehzahl soll mit einem Poti einstellbar sein. Dann soll es eben einen Tippbetrieb und einen Fahrbetrieb geben. So sind mal derweilen meine Gedanken.. aber wie ihr merkt, steckt das ganze noch in den Kinderschuhen. Also für Tipps bin ich sehr dankbar. mfg Schoasch
Hallo Schoasch, Ich habe gerade sowas gebaut: Motor 12V, 10A, Geschwindigkeitssteuerung und Drehrichtungsumkehr über einachsigen analogen Joystick, Strombegrenzung macht der Prozessor mit. Dein Motor läuft erheblich ruhiger und runder wenn Du auf eine PWM Grundfrequenz von ca. 15-18KHz gehst. Allerdings steigen die Schaltverluste im MOSFET an. Generell kann man experimentieren und mit einem Oszilloskop sehen, ob der Motor seinen Maximalstrom bei einer gegebenen PWM Frequenz noch zieht. (0,1 Ohm in die Source Leitung des MOSFETS und die Spannung darüber oszilloskopieren). Reiner
Wie kann ich die Schaltverluste am MOSFET berechnen? Von was ist sie massgebend abhängig? Wäre es möglich einmal ein Blick auf deine Schaltung zu werfen? mfg Schoasch
Hallo Schoasch Vergiß die Schaltverluste. Der Kühlkörper wird noch nicht mal warm bei 10A. Gruß Reiner
Hallo Reiner Das ganze sieht eh ungefähr so aus, wie ich es mir vorgestellt habe. Wofür hast du denn BU2 vorgesehen? Und habe ich das richtig gesehen, dass die Taster für die Drehrichtung an BU1.4 bzw BU1.5 angeschlossen werden? Eigentlich gefällt mir deine Schaltung sehr gut :-) Ich habe eigentlich eh noch einen ATMega8 hier herumliegen und weis damit nichts anzufangen.Das wäre nun der richtige Einsatz.. aber halt auch nur, wenn du so nett wärst und mir das hex-File oder Source-File geben würdest, wenn es dir nichts ausmachen würde. Könnte man als alternative zum IRFP260 auch zb einen IRFP460 oder einen IRFZ34 nehmen? mfg Schoasch
Hallo Schoasch, die optimale PWM-Frequenz ist sehr stark abhängig von der Bauweise des Motors und von den verwendeten Magneten und Eisensorten. So sind für die relativ billigen 3-5poligen "Can"-Bürstenmotoren mit Ferritmagneten und Ankern aus Standardtrafoblech 3-4kHz optimal, für hochwertige Bürstenmotoren mit Neodym- etc. Magneten und entsprechend besserem Ankerblech peilweise die doppelte Frequenz. Brushless-DC-Motoren ohne bewegtes Eisen kann man dann schon getrost deutlich über 10kHz takten, und Glockenankermotoren schließlich fühlen sich erst oberhalb von 25-30kHz so richtig wohl. Der Maßstab dabei sind nicht die Schaltverluste der Endstufe, sondern die Ummagnetisierungsverluste im Motor, die bei grob unpassender PWM-Frequenz unnötig bis übermäßig viel elektrische Energie in womöglich schädliche Wärme umgewandeln, und darüberhinaus auf Dauer die Magnete schwächen, was dazu führt, dass man mit der Zeit immer mehr Power in den Motor pumpen muss, um denselben Effekt an der Welle zu erhalten. Ich hoffe, meine Ausführungen sind hilfreich. Gruß Johannes
Hallo Schoasch, BU2 ist die Programmierschnittstelle (ISP). BU1.4 und BU1.5 werden nicht benutzt, wurden aber vorgesehen, falls man doch noch mal einen Port für irgendwas braucht. Drehrichtung und Geschwindigkeit werden mit P2 gesteuert. P2 ist ein einachsiger Analogjoystick d.h. ein Poti, daß über eine Feder eine definierte mechanische Mittelstellung hat. Beim Programmstart wird über den ADC diese Mittelstellung gelesen. Wird das Poti danach in die eine Richtung bewegt(nach Überschreitung einer "Toten Zone"), beginnt der Motor in die eine Richtung zu beschleunigen. Wird das Poti zur anderen Seite bewegt, beschleunigt der Motor in die andere Richtung. Man kann dazu auch jeden beliebigen PC-Joystick oder einen Joystick einer Funkfernsteuerung hernehmen. Meiner ist selbstgebaut. Der MOSFET is unkritisch. Er sollte eben eine geringes rds on haben und den entsprechenden Strom abkönnen. Gib mir mal Deine email Adresse. @Johannes Dem was Du schreibst stimme ich voll zu! Das Problem dabei ist nur, daß man bei "Basteleien" häufig nicht viel über den vorhandenen Motor weiß. Daher mein Vorschlag nachzumessen, ob der Motor bei einer gewählten PWM Frequenz und Last noch seinen Nennstrom erreicht. Wenn nicht, dann muß die PWM Frequenz verringert werden (der Motor wird auch gut warm bei zu hoher PWM Frequenz). Andererseits hört man auch wenn die PWM Frequenz zu niedrig ist: Die Lager fühlen sich dann nicht mehr wohl; der Motor läuft rauh. Reiner
Achso .. das hört sich eigentlich alles eigentlich ideal an :-) meine e-mail Adresse lautet: schoasch123 (ät) yahoo (punkt) de Ich danke dir sehr. Du hast recht. Das ist immer das Problem bei selbstbauprojekten, dass man nie genau weis, wie die Eigenschaften von solchen Motoren sind. Hier ist ein Foto von dem Motor: http://www.neuhold-elektronik.at/catshop/images/large/Getriebemotor_05562055.jpg Ich danke euch. mfg Schoasch
Oha, das ist ja ein "Scheibenwischermotor", der sein statisches Feld gar nicht mit einem Permanentmagneten macht, sondern mit einer zweiten Wicklung auf noch mehr Eisen als im Rotor. So einer ist nach meinen Erfahrungen per direkter PWM kaum noch vernünftig zu steuern. Da würde ich eher vorschlagen, einen steuerbaren getakteten DC-Spannungsregler zu verwenden... Gruß Johannes
Ich habe leider noch keine PWM-Tests damit machen können, da meine Netzgräte bis jetzt immer in die Knie gegangen sind :-) Aan einen Schaltregler habe ich auch schon gedacht. Denn ich hab mich mal wegen Trafopreise etwas erkundigt... naja so ganz günstig sind die Dinger in der Preislage halt nicht. Darum würde ich eigentlich auch gerne 2 Trafos parallelschalten,wenn möglich, denn da könnte ich welche mit 11.8V und 50VA um ca 3Euro das Stück besorgen. Gibt es nicht auch Schaltregler mit eingebauter Strombegrenzung? Ich glaube mal einen gesehen zu haben, weis aber leider die bezeichnung nicht mehr. Habt ihr noch vorschläge bezüglich der Stromversorgung? mfg Schoasch
Ich glaube nicht dass die Bauart mit den Feldspulen heute noch hergestellt wird, ist viel teurer als Ferritmagnete für das Feld. Leider lässt sich durch das Schneckengetriebe der Motor nicht drehen so dass es nicht möglich ist die Magnetpole zu fühlen oder eine induzierte Spannung zu messen.
Angehängte Dateien:
-

m2.jpg
38 KB

So, ich habe mal ein Foto des Motors gemacht. Es ist ein "normaler" Gleichstrommotor mir permanentmagneten zur Erzeugung des erregerfeldes. Anbei ein Foto.
Angehängte Dateien:
-

m1.jpg
44 KB
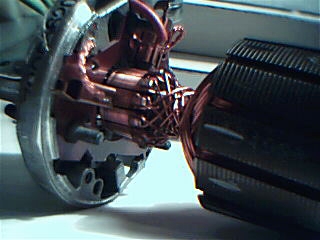
Aber was mich nune etwas irritiert , ist die Tatsache, das der motor 3 Bürsten besitzt. Wozu ist die dritte? Eine davon ist mit dem Gehäuse verbunden(im bild ganz vorne).

{kind=link}
gg Das Habe ich mir Fast gedacht. Die 3 Bürsten sind da, damit man 2 verschiedene Geschwindigkeiten fahren kann. Ich bin sehr sehr froh das ich den Motor aufgemacht habe :D Wenn nehmlich den Motor an den 2 Anschlussdrähten anschliesse, zieht er 5A. Wenn ich ihn nun aber mit dem Gehäuse und einem Anschlusspin, anschließe, dann zieht er nur 1A :D und ich habe noch 2 Verschiedene Drehzahlen :-) Somit erleichter sich die Schaltung erheblich. Nur wie sieht es jetzt mit der PWM Frequenz aus?
Ähm, nun, ja... also doch ein Scheibenwischermotor, wenn auch nicht ganz so, wie ich erst gedacht hatte :-) Also zur PWM würde ich da mal sagen, wie wär's mit zwei Endstufen? Je eine für die beiden Bürstenanordnungen? Natürlich nur, wenn Du den höheren Drehzahlbereich wirklich brauchst... Gruß Johannes
Hi, Die PWM-Frequenz bei einem normalen Bürstenmotor ist relativ unkritisch was den Motor angeht. Einige kHz geht immer gut und ist noch gut zu handhaben. Die oben gepostete primitive Ansteuerung des IRFB260 ist max für einige kHz gut, im zweistelligen Bereich werden die Schaltverluste heftig. Mosfetauswahl: Als erstes steht der Rdson, dann, bei PWM, die Gateladung. Der max. Strom ist meist uninteressant, den erreicht man normalerweise nie. Gruß, Norbert
Naja.. 2 Endstufen?! hm.. Ich glaube, ich würde das umschalten zwischen den 2 Geschwindigkeiten mittels Relais bevorzugen... Wird wahrscheinlich auch etwas einfach gehen als mit 2 Endstufen.
Also ehrlich, bei den heutigen MOSFET-Preisen (z.B. 1,15 Euro bei Reichelt für einen IRL3803N mit max 9mOhm Rdson@4,5V Ugs) würde ich kein Relais mehr nehmen. Einfacher geht es doch wirklich nicht. Es sei denn, Dein PIC hat keine zwei PWM-Ausgänge... Gruß Johannes
Naja.. für eine H-Brücke bräuchte ich dann ja 4 Stück.. ein Relais
kostet mir 90Cent ;-). Ausserdem möchte ich einmal meine Fets
verarbeiten, die ich zuhause habe.
>>Es sei denn, Dein PIC hat keine zwei PWM-Ausgänge...
Bis jetzt habe ich mich noch für keine entschieden. Aber vl wirds auch
ein ATMega8. Und ausserdem kann man auch gewisse sachen mit Software
machen.
@Robert "Die oben gepostete primitive Ansteuerung des IRFB260 ist max für einige kHz gut, im zweistelligen Bereich werden die Schaltverluste heftig." Anschauung macht Gedanken, aber die Schaltung läuft mit 18KHz PWM Frequenz und der angeschlossene Motor zieht 10A. Der MOSFET wird selbst ohne Kühlkörper nicht wärmer als 40°C. @Schoasch Eines verwirrt mich jetzt an der Diskussion: Wozu zwei umschaltbare Geschwindigkeiten vorsehen wenn man plant eine PWM Geschwindigkeitsregelung aufzubauen. Gruß Reiner
"Gibt es nicht auch Schaltregler mit eingebauter Strombegrenzung? Ich glaube mal einen gesehen zu haben, weis aber leider die bezeichnung nicht mehr. Habt ihr noch vorschläge bezüglich der Stromversorgung?" Die Dinger heißen PC-Power Supplies und schaffen die 12V/6A leicht):- (Gibt's auf dem Schrott) Gruß Reiner
@Reiner: Da kann was nicht stimmen. Der IRFP260 hat 55mOhm. Das macht bei 10A ohne Schaltverluste schon 5,5W Verlustleistung. Dazu braucht er vom Beginn des Schaltens bis zum vollen Durchschalten etwa 60nC. Das ist diese Rampe bei "Gate Voltage vs. Gate-Source Voltage". Das ist der fiese Linearbetrieb. Bei 6V Gatespannung die er dann hat lässt der 560R 11mA fliessen, das dauert dann etwa 5,5µs. Deine 18kHz hat ne Periode von 55µs. Also 10% der Zeit ist das Ding im Linearbetrieb. Wie gesagt, da stimmt was nicht. So wie gepostet muß der schweineheiß werden, ohne Kühlung raucht er ab. Gruß, Norbert
@Schoasch Ich hatte nicht gleich an eine ganze H-Brücke mit FETs gedacht. Ich hatte nur die getrennte Ansteuerung der beiden Bürsten für die beiden Drehzahlbereiche gemeint. Allerdings hat Reiner schon recht, wenn er fragt, warum beide Drehzahlbereiche überhaupt getrennt ansteuerbar sein sollen. Per PWM reicht schließlich einer (im Zweifelsfall der schnellere). Oder gibt es einen bestimmten Grund, unbedingt beide zu nutzen? (Z.B. das hörere Drehmoment beim unteren) Gruß Johannes
@Norbert Na ja, abgeraucht ist er bisher nicht, aber vielleicht war meine Aussage über die 40grad Celsius etwas optimistisch. Der Motor treibt über ein Planetengetriebe eine Hubspindel und hebt dabei eine Last von ca 50Kg ca. 0.7m hoch. Dazu braucht er einige Sekunden. Dann muß er mit Minimallast wieder abwärts. Ich habe also nicht wirklich Zeit um den Motor im Dauerlauf unter Vollast zu testen. Während der Tests lief der FET ohne Kühlkörper. Er hat jetzt, nachdem das Ganze zusammengebaut ist, natürlich einen Kühlkörper. Ich habe aber auch noch mal nachgerechnet und rekapituliert: Die Einschaltdauer erreicht maximal 70% d.h. die maximale Verlustleistung ohne Schaltverluste liegt bei 3,9W. (10A, 55mOhm, 70%) Die Schaltzeit werde ich mal messen, aber Deine Rechnung ist schon richtig. (Statt der 6V UGS während der Ladephase würde ich 5V annehmen, was die Sache aber nicht besser macht) Wenn ich von 10% Linearbetrieb ausgehe liege ich überschlägig bei 4W an Schaltverlusten. Zusammen macht das also ca 8W. Also, ein kleiner Kühlkörper muß schon sein. Gruß Reiner
Hi Sorry, dass ich erst jetzt schreibe. Naja.. die wahl der geschwindigkeit ist ja nicht schwierig. Dazu würde ich einfach einen Schalter und ein Relais nehmen. Weiters ist es manchmal Praktisch wenn man schneller fahren kann und manchmal auch praktisch langsam zu fahren. Ausserdem wird auch das Moment abhänghig sein von der der Wahl der benutzen Bürste. Aber wie gesagt, das ganze steck noch in Kinderschuhen. Ich muss zuerst einmal ein paar Tests machen... Aber eigentlich ist es, ehrlich gestanden, ein dumme Angewohnheit von mir, dass ich immer alle Möglichkeiten eines Bauteils ausnutzen möchte. Vl. hat es ja auch wirklich keinen sinn die Umschaltung zu machen. Aber wie erwähnt, könnte man das ganze auch recht einfach machen. mfg Schoasch
Hallo Schoasch "Ausserdem wird auch das Moment abhänghig sein von der der Wahl der benutzen Bürste." Richtig, Die 5A Variante gibt das höhere Drehmoment. (Drehmoment = Pe*9550/n, Pe in KW, n in U/min) "Weiters ist es manchmal Praktisch wenn man schneller fahren kann und manchmal auch praktisch langsam zu fahren." Auch richtig, aber deshalb macht man ja die PWM um das zu können. Die Umschaltung macht nur dann Sinn, wenn Du dieselbe Drehzahl (einstellbar mit der PWM) mit zwei verschiedenen Drehmomenten erreichen willst. Gruß Reiner
Ist wirklich die 5A Variante die, mit dem grössten Drehmoment? Immerhin sind da die Bürsten gerade einmal ca 85Grad versetzt. Aber ehrlich gestanden würde ich die 1.5A bevorzugen. Aber ob das ausreicht um meine gewünschten Lasten zu heben, weis ich noch nicht. Da muss ich zuerst einmal einen Versuch machen und ausserdem zuerst einmal genau wissen, in welchem Bereich die Last liegt. Ich schätze mal, dass es so ca 5kg bis 10kg sein werden. Aber genaueres kann ich derweilen noch nicht sagen und auch nicht berechnen, da der mechanische Aufbau noch nicht fertig ist.
Hi Ich habe jetzt endlich einmal ein Spannungsquelle, die den fliessenden Strom aushält. Damit habe ich gleich einmal ein paar Tests gemacht. Durch Zufall bin ich dann auf eine Artikel in einem alten Elrad gestosse, wo diese ein Drehzahlsteuerung mit einem NE555 gemacht haben. In der Originalschaltung wird ein BD439 verwendent, da ich den gerade nicht zuhause habe und auch keinen kaufen möchte, habe ich mir gedacht, dass es auch sicher möglich wäre einen MOSFET dafür zu benutzen. Zuerst habe ich einfach nur den MOSFET(IRFP450) eingesetzt aber da dieser ziemlich warm wird, wurde ich etwas stutzig. Ansich sollte es ja kein Problem sein, denn der Transistor wird ja nur als Schalter verwendet. Aber was ich übersehen hatte war ja die Gate-Kapazität, die ja mir 2600pF nicht gerade wenig ist. Ist die Gate-Kapazität in Verbingung mit dem Widerstand R4 verantwortlich für die Erwärmung(da das abschalten sehr träge von statten geht)? Oder ist es schlicht und einfach der Strom die Ursache? Immerhin verbrattet der FET ca 0.9W.. aber kann durch diese 0.9W der Fet brennend heiß werden? Nunja.. jetzt hätte ich mir halt das ganze etwas anderst überlegt und wollte euch fragen, ob das so funktionieren könnte wie im Schaltplan den ich angehängt habe? Ich danke für die Hilfe. mfg Schoasch
Hi! Mit 1W kannst du problemlos ein TO220 zum abkochen bringen. Zur PWM Freq.: Dein Motor dürfte eine recht hohe Ind. haben und der nutzbare Strom geht bei hohen Freq. ordentlich runter.(Das Drehmoment natürlich auch)Wenn dich ein brummender Motor nicht stört versuche mal mit 100-300Hz PWM. Der Motor hängt dann besser am Tastverhältnis deiner PWM und hat ein deutlich höheres Drehmoment in den kleinen Drehzahlen. Viel Erfolg, Uwe
Die Frequenz liegt ca bei 60Hz.Man hört es auch schön brummen:-) Naja.. es ist ja kein TO220 gehäuse sondern ein TO247AC Gehäuse... aber selbst für das wird es zu viel sein.. Aber wieso das bei der Originalschaltung nichts macht ist mir ein Rätsel.
Ich habe ein Schweißgerät mit einer eigenen Steuerung ausgerüstet dort war auch so ein Scheibenwischermotor mit Untersetzungsgetriebe, das Ding läuft mit allen PWM Frequenzen(Hardware) die der AVR zur Verfügung stellt ruhig, habe dazu nen IRF540 oder nen BUZ11 verwendet, das Ding wird handwarm aber man braucht umbedingt ne hohe Gatespannung sonst erwärmt er sich sehr stark. Ich habe da einfach mittels Widerstand und Z-Diode gemacht und das ganze mit nem kleinen BC5XX aufs Gate gegeben. Durch die starke Untersetzung hat das Ding in allen lagen genügend Drehmoment.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.