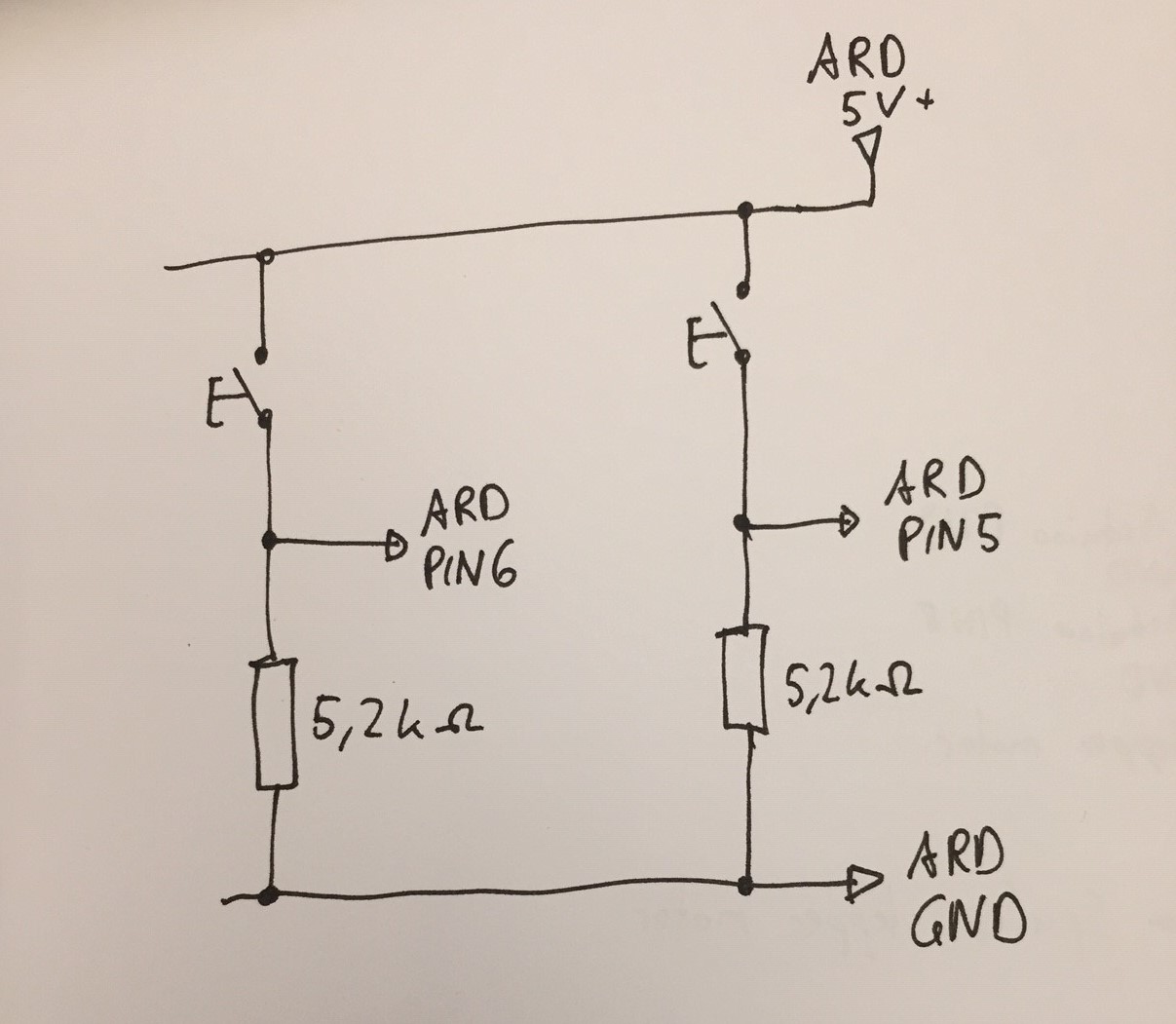
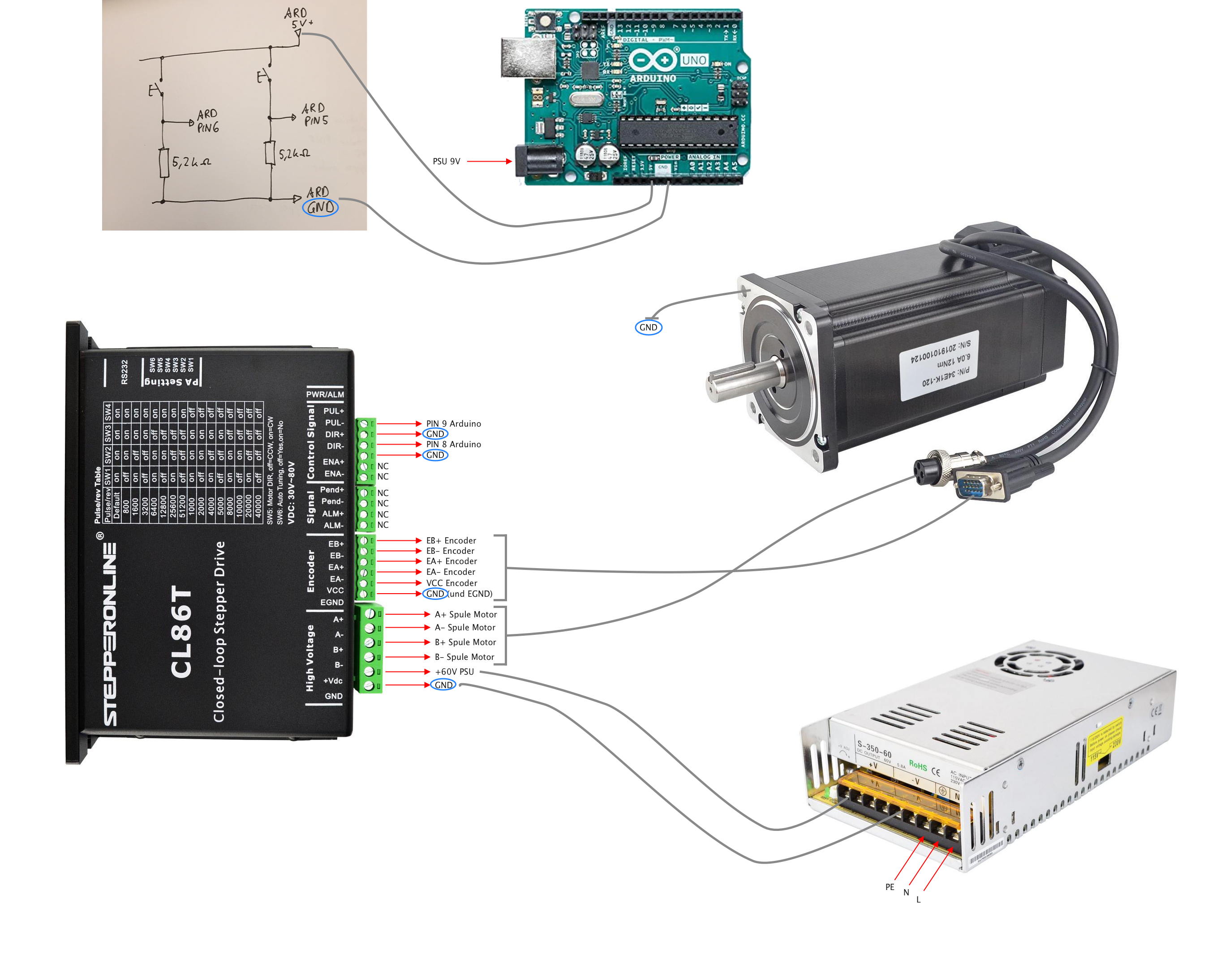
Ich steuere gerade einen closed loop Schrittmotor mit einem Arduino Uno R3 über den Schrittmotortreiber CL86T an. Weiters habe ich 2 Taster mit Pulldown-Widerständen angeschlossen, mit denen ich den Schrittmotor z.B. um 90 Grad in eine Richtung drehen lassen kann. Die Ansteuerung funktioniert soweit, jedoch lösen die Taster auch aus, wenn ich deren Leitungen (z.B den Pulldown-Widerstand) und zusätzlich den Schrittmotor (metallische Oberfläche) angreife. Wieso ist das der Fall? Hat wer einen Tipp? https://www.omc-stepperonline.com/index.php?route=extension/module/iblogs&path=2&post_id=23 so habe ich den Schrittmotor angeschlossen (am Bild ist ein open loop Treiber und Motor) PSU hat 60VDC Der Schaltplan von den Tastern ist auch angefügt.
Angehängte Dateien:
-

Taster.jpg
160 KB
Leg mal das Motorgehäuse mit auf Masse, oder mach die Widerstände kleiner. 1k
mach mal einen 10n Kondensator an den Eingang, parallel zum R.
Wenn du die internen Pullups des Mega (versehentlich) aktivierst, ziehen die die Pins schon auf Kippe. Miss also mal im Ruhezustand, welche Spannung an den Eingangspins des Arduino liegt.
Hallo wie ist denn das 5V Netzteil angeschlossen? Die DC Buchse des Arduino braucht 9V und nicht 5V wie im Schaltplan angegeben, mfg Harald
Christoph K. schrieb: > Hat wer einen Tipp? Zeig mal einen Schaltplan und Bilder von deinem Aufbau. > Hat wer einen Tipp? Besonderes Augenmerk ist darauf zu legen, dass nicht nur Ansteuersignale verbunden sind, sondern auch die Masse der gesamten Schaltung nicht erst im E-Werk verbunden wird. > Hat wer einen Tipp? Hast du ein Multimeter? Welche Spanungen kannst du im Normal- und im Fehlerfall an den IC-Pins gegen Masse messen?
Das hat zwar nicht unbedingt etwas mit dem Problem zu tun, aber: Christoph K. schrieb: > PSU hat 60VDC Der DM542T ist spezifiziert mit "Inputvoltage 20-50VDC". Wer weiß, was das für Folgen haben kann...
Christoph K. schrieb: > wenn ich deren Leitungen (z.B den Pulldown-Widerstand) und zusätzlich > den Schrittmotor (metallische Oberfläche) angreife. Christoph K. schrieb: > PSU hat 60VDC Ist das nicht zu viel ? Und woher kommt die Spannung für den Arduino ? Du wirst 2 Netzteile haben, und die Spannung des Arduino ist gegenüber der Spannung des Motors über den Treiber per Optokoppler getrennt. Dadurch können die Spannungen gegeneinander frei arbeiten, gestört sein durch Einkopplungen der Netzwechselspannung oder Schaltnetzteilkapazitäten. Verbinde GND des Arduino mit GND der PSU und verbinde (falls vorhanden) die Abschirmung des Motorkabels sowie das Motorgehâuse auch damit. Nutze nur einen zentralen Massesternpunkt, die Motorgehäuse dürfen nicht über einen zweiten Weg (Metall der Maschine) miteinander Kontakt haben, dann wurde man nur die Maschine mit dem Massesternpunkt verbinden und nicht jeden Motor einzeln. Eventuell verringern sich die Störungen schon, wenn du bei einem Netzteil L und N vertauschst.
Danke für die Antworten. Habe das Problem gelöst - bin mir aber nicht ganz sicher, ob das wirklich der Fall ist... Hatte zuvor echt nicht alle GNDs miteinander verbunden. Jetzt sind sie alle; sogar der GND vom Encoder (Closed Loop). Das alleine hat das Problem aber nicht gelöst! Ich musste wieder das Gehäuse vom Motor auch an GND anhängen - erst dadurch funktionierte es. Mir kommt das aber nicht ganz sicher/normal vor - oder ist es das doch? Das kann es doch nicht sein, dass man das machen MUSS? Das einzige was noch nicht am gemeinsamen GND hängt, sind die beiden Spulen vom Motor (Kontakte A- und B- am Treiber). Macht es Sinn diese auch am gemeinsamen GND zu hängen? Also normal wäre das auch nicht (?) - hätte ich noch nirgendwo gesehen/gehört. Aber kann mir vorstellen, dass das das Problem sein könnte bzw. eine bessere Lösung sein könnte, als das Gehäuse an GND zu hängen. Weil es ein paar Unklarheiten gibt: Mein Motor + Treiber: https://www.omc-stepperonline.com/de/closed-loop-schrittmotor-kit/tp-serie-1-achs-stepping-kit-mit-geschlossenem-regelkreis-12nm-1700oz-in-nema-34-motor-and-treiber.html?mfp=156-haltemoment-ncm%5B1200%5D Netzteil Motor: https://www.omc-stepperonline.com/de/schaltnetzteil/350-watt-60-v-5-9a-115-230-v-schaltnetzteil-schrittmotor-cnc-router-kits.html?mfp=47-ausgangsspannung-v%5B60%5D Arduino hängt nur an der DC-Buchse an 9V über ein externes Netzteil. Matthias S. schrieb: > Miss also mal im Ruhezustand, welche > Spannung an den Eingangspins des Arduino liegt. Spannung war ca. 0,2V
Angehängte Dateien:
-

Schaltplan.png
2,3 MB
Hier noch der Schaltplan. Nicht gerade der professionellste aber besser als keiner.
Christoph K. schrieb: > Das einzige was noch nicht am gemeinsamen GND hängt, sind die beiden > Spulen vom Motor (Kontakte A- und B- am Treiber Das darf auch nicht gemacht werden, Kurzschluss.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.