Ich suche Unterlagen zur Übersetzung des Assembler Codes in das Binär-Format. Früher war in der Befehlsbeschreibung der Prozessormanuals immer auch das Bitfeld der Befehlskodierung enthalten, so dass man sehen konnte, welche Bits z.B. für die Registerauswahl verwendet wurden. Hat jemand Unterlagen für den Thumb2 Instruktionssatz?
Lade doch selbst: infocenter.arm.com, fürs ARM ARM (kein Schreibfehler) wollen die IIRC Deine Email haben.
Die Suchmaschine meiner Wahl liefert bei "thumb2 instruction set" ziemlich weit oben den folgenden Link: www.class.ece.iastate.edu/cpre288/resources/docs/Thumb-2SupplementRefere nceManual.pdf Das könnte schon etwas Licht in Deine Finsternis bringen.
Angehängte Dateien:
-

nichtGefunden.png
50 KB
>Das könnte schon etwas Licht in Deine Finsternis bringen.
Leider nicht.
Da war ich wohl zu ungenau. Ohne das www geht's. Sorry! Sind "nur" 650 Seiten.
>Da war ich wohl zu ungenau. Ohne das www geht's. Sorry!
Danke. Hat funktioniert und es steht auch drinnen, was ich suche.
Apropos:
Weiß jemand, wie man aus dem GCC einen Assembler Abschnitt aufruft und
wie die Parameterübergabe aussieht?
chris_ schrieb: > Weiß jemand, wie man aus dem GCC einen Assembler Abschnitt aufruft und > wie die Parameterübergabe aussieht? Mit Inline Assembler kannst du alles so aufrufen, wie es dir beliebt. https://gcc.gnu.org/onlinedocs/gcc/Using-Assembly-Language-with-C.html#Using-Assembly-Language-with-C
>Mit Inline Assembler kannst du alles so aufrufen, wie es dir beliebt.
Ich will keinen Inline Assembler verwenden. Ich mag die Syntax nicht.
Hat jemand Beispielfiles in der Form "asmBeispiel.c" File das eine
Funktion im "asmBeispiel.s" File aufruft?
chris_ schrieb: > wie die Parameterübergabe aussieht? Reichlich komplex übrigens. Die Idee dabei ist, dass man dem Compiler bei seinen Optimierungen möglichst nicht im Weg herum steht. Daher deklariert man erst einmal normale Variablen im umgebenden C-Code, und diese bekommen dann im inline asm statement "constraints", d.h. man beschreibt, welchen Randbedingungen diese unterliegen, damit der mit ihnen realisierte Assemblercode noch funktioniert. Dadurch ist der Compiler ähnlich wie bei Optimieren eines normalen Kompilats in der Lage, die Daten in Registern möglichst effizient zu nutzen. Geht natürlich nur, wenn man ihm auch die Freiheit dafür lässt, d.h. möglichst auch Zwischenergebnis-Register in dieser Form deklarieren, statt einfach feste Annahmen für diese zu treffen und sie dann alle stur in die "clobber"-Liste zu knallen.
chris_ schrieb: > Ich will keinen Inline Assembler verwenden. Ich mag die Syntax nicht. Dein Problem. Die Syntax muss man nicht mögen :), sondern sie soll optimalen Code gestatten. Was du suchst, ist wohl eher das ABI. Da gibt's meines Wissens bei ARM mehr als eins. Cortex-M4 klingt nach EABI. https://stackoverflow.com/questions/8060174/what-are-the-purposes-of-the-arm-abi-and-eabi
Der gcc arbeitet auch mit Assembler Files .s Ich benutze das bei einem Bare-Metal Projekt für den Startup-Code. https://stackoverflow.com/questions/7190050/how-do-i-compile-the-asm-generated-by-gcc gcc -c file.s
> Hat jemand Beispielfiles in der Form "asmBeispiel.c" File das eine > Funktion im "asmBeispiel.s" File aufruft? Einfach als extern declarieren und aufrufen:
1 | extern int foo(int); |
2 | |
3 | ...
|
4 | printf("foo(2)=%d\n", foo(2)); |
5 | ...
|
Der Assemblercode muß das Symbol auch entspr exportieren und natürlich die ABI berücksichtigen (z.B. r0 ist erste Parameter und Rückgabewert):
1 | ... |
2 | .global foo |
3 | foo: |
4 | lsls r0,r0,#1 |
5 | bx lr |
6 | ... |
Danke für die nützlichen Hinweise. Ich habe mir überlegt, erst einmal mit einem sehr einfachen Beispiel anzufangen und folgende delay-Funktion als Assembler Funktion zu realisieren ( und die Laufzeiten mit dem Debugger auszumessen ). Falls jemand schon weiß wie es geht, darf es gerne geposted werden.
1 | #include <stdint.h> |
2 | |
3 | // CPU_CLK=64MHz
|
4 | void delay(uint32_t ms) |
5 | {
|
6 | int32_t n; |
7 | for(n=0;n<ms;n++); |
8 | }
|
9 | |
10 | int main(void) |
11 | {
|
12 | delay(1000); |
13 | }
|
Ich sehe gerade, hier im MC-Netz gibt es ein ARM-ASM Tutorial: https://www.mikrocontroller.net/articles/ARM-ASM-Tutorial Als erstes sehe ich: As the starting point for any calculation, some specific values need to be put into the registers. The easiest way to do that is: ldr r0, =123456789 The number 123456789 will be encoded as part of the program, and the instruction lets the processor copy it into the register “r0”. Any number and any register in the range r0-r13 can be used instead. Gibt es beim ARM-Assembler kein "load immediate" ?
chris_ schrieb: > Gibt es beim ARM-Assembler kein "load immediate" ? Ist halt 'ne RISC-Maschine. Bei den 16-Bit-Thumb-Befehlen, wie viele Bits "immediate" würdest du denn erwarten? chris_ schrieb: > und die Laufzeiten mit dem Debugger auszumessen Muss übrigens nicht sehr deterministisch sein (vor allem nicht, wenn Caches ins Spiel kommen). Für ein grobes "verzögere mal mindestes <N> Mikrosekunden" geht's, genauer mit einem Timer.
chris_ schrieb: > Gibt es beim ARM-Assembler kein "load immediate" ? Doch. Aber versuch mal, in einem 16 oder 32 Bit breiten Befehl, eine 32 Bit breite Konstante unterzubringen. Weshalb es ein paar Varianten dafür gibt. Obige arbeitet PC-relativ.
Angehängte Dateien:
-

C_asm_failed.png
150 KB
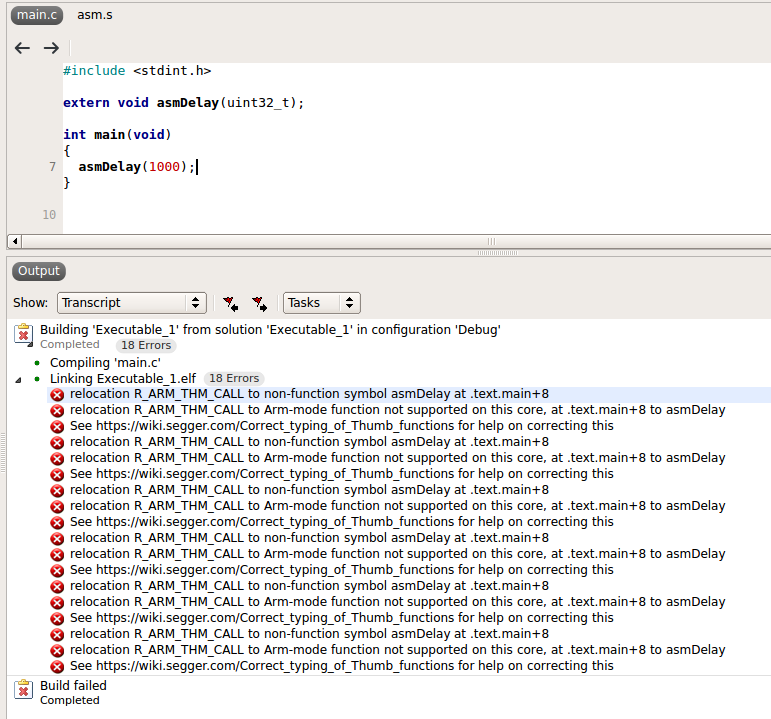
Uhh ... gleich der erste Fehlschlag.
1 | .global asmDelay |
2 | |
3 | asmDelay: |
4 | |
5 | ldr r0,=1000 |
6 | |
7 | bx lr |
Bisschen Wasserkopf im Asm-File ist schon erforderlich. Orientiere dich grob an dem, was der Compiler als Asm-File auswirft. Und schau nach, was das jeweils bedeutet. Per Default erzeugt der Assembler klassischen ARM Code (Arm-Mode), keinen Thumb Code. Mit dem kann der Cortex M4 aber nichts anfangen.
Der Linker gibt doch zusammen mit der Fehlermeldung gleich einen Hilfe-Link aus der das Problem beschreibt - Mann ... :-(
>Der Linker gibt doch zusammen mit der Fehlermeldung gleich einen >Hilfe-Link aus der das Problem beschreibt - Mann ... :-( Ja, aber auf keinen Fall solltest du die Lösung für das Assembler-File hin schreiben, sonst könnte noch jemand die Nützlichkeit des MC-Netz mit der von Stack-Overflow verwechseln. Es soll ja schließlich jeder zwei Stunden nach dem richtigen Setup suchen müssen.
Angehängte Dateien:
-

ARM_MOV_immidiate.png
79 KB -

ldr_to_move_conversion.png
7 KB
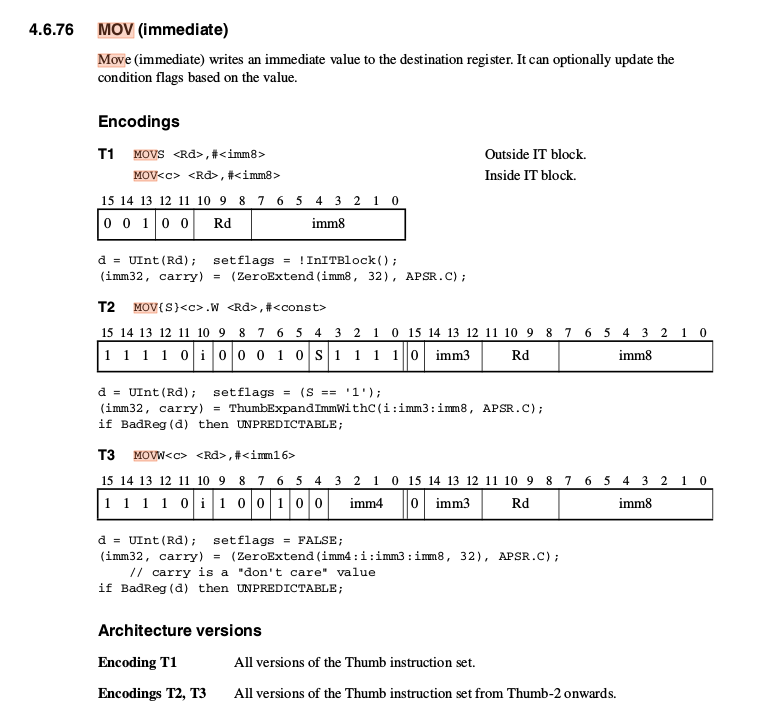

A.K. schrieb >chris_ schrieb: >> Gibt es beim ARM-Assembler kein "load immediate" ? >Doch. Aber versuch mal, in einem 16 oder 32 Bit breiten Befehl, eine 32 >Bit breite Konstante unterzubringen. Weshalb es ein paar Varianten dafür >gibt. Obige arbeitet PC-relativ. Der Assembler scheint "ldr" ( load register ) in ein mov umzuwandeln. Die Kodierung des Befehls ist dann 0xF44F707A d.h. i=1 imm4=F imm3=7 imm8=7A Mir ist unklar, wie der Prozessor daraus die 1000 ( 0x3E8 ) zusammen setzt. Mein aktueller Code:
1 | @ https://www.mikrocontroller.net/articles/ARM-ASM-Tutorial |
2 | @ https://stackoverflow.com/questions/28669905/what-is-the-difference-between-the-arm-thumb-and-thumb-2-instruction-encodings |
3 | |
4 | .cpu cortex-m4 |
5 | |
6 | .syntax unified |
7 | .thumb_func |
8 | .global asmDelay |
9 | |
10 | asmDelay: |
11 | |
12 | nop |
13 | |
14 | ldr r0,=1000 |
15 | |
16 | bx lr |
von Jörg W. (dl8dtl) (Moderator) Benutzerseite 13.02.2021 18:48 >chris_ schrieb: >> Ich will keinen Inline Assembler verwenden. Ich mag die Syntax nicht. >Dein Problem. Die Syntax muss man nicht mögen :), sondern sie soll >optimalen Code gestatten. >Was du suchst, ist wohl eher das ABI. Da gibt's meines Wissens bei ARM >mehr als eins. Cortex-M4 klingt nach EABI. >https://stackoverflow.com/questions/8060174/what-are-the-purposes-of-the-arm-abi-and-eabi Der Parameter für die Delay-Funktion scheint in R0 zu stehen ... ich hab's einfach mal so verwendet. Vielleicht könnte man die Parameterübergabe vereinfachen, wenn man immer einen Pointer auf ein uint32_t Array übergibt und dann nur die Inhalte in der Assembler-Routine ausliest und die Ergebnisse dort hineinschreibt.
chris_ schrieb: > Mir ist unklar, wie der Prozessor daraus die 1000 ( 0x3E8 ) zusammen > setzt. "Modified immediate constants in Thumb instructions" > 0xF44F707A > > d.h. > i=1 > imm4=F > imm3=7 > imm8=7A Nö. Variante T2: i:imm3:abcdefgh = 1:111:01111010 i:imm3:a = 11110 => 0... 1b cdefgh00 = 11.1110.1000
F44F ist das T2 Encoding und wie das geht steht in 4.2.1 "Shifted 8-bit values".
Bei Delay-Routinen dieser Art empfehle ich Selbstkalibrierung beim Programmstart, statt einmaliger Handkalibrierung, denn jede Änderung am Prozessor, z.B. durch Taktfrequenz, Cache, Prefetch, Waitstates, Mondphase, ... kann die Laufzeit ändern. Auch Code-Alignment kann es beeinflussen. Also: Beim Programmstart diese Routine einmalig laufen lassen und die Laufzeit davon per (Tick-)Counter messen. Daraus einen Multiplikationsfaktor ableiten, der bei künftigen Delays eingerechnet wird. Dann hat man nur noch einen Parameter, nämlich die Taktfrequenz vom Counter.
> Vielleicht könnte man die Parameterübergabe vereinfachen, [...]
Die ABI musst du dir eh durchlesen - neben der Parameterübergabe sind ja
auch ne Latte anderer Sachen festgelegt, die du berücksichtigen musst.
> Bei Delay-Routinen dieser Art empfehle ich Selbstkalibrierung beim > Programmstart, Selbst das ist ziemlich fruchtlos - wenn da nen anderer Busmaster zwischenfunkt (DMA, anderer Core), stimmt wieder nichts. Für sowas gibts den SysTick.
foobar schrieb: > Selbst das ist ziemlich fruchtlos - wenn da nen anderer Busmaster > zwischenfunkt (DMA, anderer Core), stimmt wieder nichts. Zumindest stimmt die Mindestzeit, denn beim Start kann man sich eine Phase aussuchen, in der niemand stört. Dass Delays aus Programmschleifen nach oben variieren können, ist klar und sollte beachtet werden. > Für sowas gibts den SysTick. Klar. Wenn man sowas hat. Dafür ist das prinzipielle Verfahren zur Laufzeit der Delays unabhängig von jedweden speziellen Ressourcen, wie eben dem Systick. Weshalb das auch schon bei Architekturen wie ARM7 funktionierte. Kann man das dann noch über eine RTC kalibrieren, ist auch die Taktfrequenz aus dem Spiel.
Vorsicht übrigens bei der onlineseite von Keil, die unter anderem die SIMD Intrinsics beschreibt. Hab dort schon 3 Fehler entdeckt. Man sollte sich besser auf das instructionset Dokument von Arm verlassen.
Horst V. schrieb: > Die Suchmaschine meiner Wahl liefert bei "thumb2 instruction set" > ziemlich weit oben den folgenden Link: > www.class.ece.iastate.edu/cpre288/resources/docs/Thumb-2SupplementRefere > nceManual.pdf > > Das könnte schon etwas Licht in Deine Finsternis bringen. chris_ schrieb: >>Das könnte schon etwas Licht in Deine Finsternis bringen. > > Leider nicht. aber wenn man den link selber in die Suchmaschine eingibt.. http://class.ece.iastate.edu/cpre288/resources/docs/Thumb-2SupplementReferenceManual.pdf (aber das ist alt..) Außerdem kann man echt Zweifel haben: RISC? aber drumherum darfs ein wenig mehr Truthahn sein, bzw. ein wenig undokumentiert stört auch nicht? Gut, wenn man schon einen Debugger, oder ein paar Hexfiles (und ein Tutorial) parat hat und gut, dass es das µc-forum gibt ;) . (prx) A. K. schrieb: > Aber versuch mal, in einem 16 oder 32 Bit breiten Befehl, eine 32 > Bit breite Konstante unterzubringen. Weshalb es ein paar Varianten dafür > gibt. Obige arbeitet PC-relativ. DAS ist mal interessant/spannend, aber hinterlässt ein großes ?
von foobar (Gast) 14.02.2021 08:10 >F44F ist das T2 Encoding und wie das geht steht in 4.2.1 "Shifted 8-bit >values". Himmel Herrgott ist das aufwendig! A.K. schrieb: >Nö. Variante T2: i:imm3:abcdefgh = 1:111:01111010 >i:imm3:a = 11110 => 0... 1b cdefgh00 = 11.1110.1000
chris_ schrieb: > Himmel Herrgott ist das aufwendig! Ja, wer mit Panel-Schaltern in Maschinencode programmiert, tut sich mit einer alten PDP-11 leichter. ;-)
Kann man auf einen im Assemblerfile definierten Speicherbereich von der C-Seite zugreifen?
1 | filterData: |
2 | .word 4321 |
(prx) A. K. schrieb: > Bei Delay-Routinen dieser Art empfehle ich Selbstkalibrierung beim > Programmstart, Erinnert mich an die Einführung des Pentium 2, an dem sämtliche Borland Pascal Programme mit einem Abbruch scheiterten, weil die CPU zu schnell wurde. Zum Glück hat man das Problem bei µC eher selten. Da programmiert man seltener für so einen wilden ständig mutierenden Zoo von Hardware, wie beim PC.
Stefan ⛄ F. schrieb: > Zum Glück hat man das Problem bei µC eher selten. Da programmiert man > seltener für so einen wilden ständig mutierenden Zoo von Hardware, wie > beim PC. Die Probleme sind ähnlich, wenn man nicht auf dem ziemlich einfach reproduzierbaren Niveau der AVRs bleibt. Allein wenn man sich durch die diversen STM32 Familien mit unterschiedlichen Flash-Konfigurationen bewegt, hinsichtlich Caching und Waitstates abhängig von der Taktfrequenz, kann das ein Thema sein. Selbstkalibrierung vermeidet dann Fehler. Auch schon die Verschiebung des Codes der Schleife um ein paar Bytes kann Folgen haben.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.