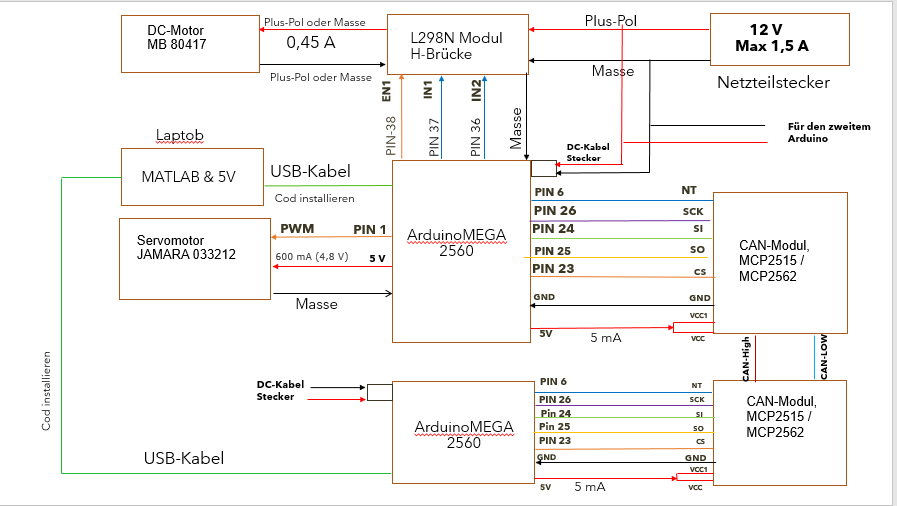
Hallo Zusammen, im Anhang ist ein Bild zu finden, wo ich ein Konzept gemacht habe, bevor ich die Bauteile kaufe, möchte ich euch fragen, findet ihr irgendwelches falsches. ist der Servomotor problemlos durch den Pin 5V Arduino zu steuern. der benötigt 600mA bei 4,6 V und 750 mA bei 6 V. Vielen Dank
Angehängte Dateien:
Mag OT sein, aber was ist ein „Getriebsgerät“? Ernstgemeinte Frage – selbst die große Datenkrake bringt nur „Keine Ergebnisse für Getriebsgerät gefunden“ hervor.
Was ist denn ein Getriebsgerät? Im Schaltplan sehe ich einen DC-Motor, einen Servo, 2 Mikrocontroller die über einen Bus verbunden sind Was soll die Maschine am Ende des Tages machen?
• Verwendung des „MATLAB Support Package for Arduino Hardware“ für die Programmierung/Steuerung des Arduinos • Auswahl des gewünschten Arduino-Boards • Ansteuerung/Auswertung folgender Hardware an einem Arduino: o Servomotor: stellt/simuliert die Kupplungsposition zwischen 0% und 100 % (Position wird dem Motor vom Arduino über PWM-Duty-Cycle vorgegeben und vom Motor selbständig eingeregelt) o Gleichstrommotor (ggf. mit mechanischem Anschlag): Vorwärts drehen (ggf. bis Anschlag) [entspricht Hochschalten] Stillstand [kein Schaltvorgang] Rückwärts drehen (ggf. bis Anschlag) [entspricht Runterschalten] o • Übertragung der Steuerbefehle und Rückmeldung per CAN-BUS o Getriebesteuergerät empfängt Steuerbefehle und sendet Status als Rückmeldung o Senden der Steuerbefehle und Empfangen der Rückmeldung mit Hilfe eines zweiten Arduinos (simuliert das Fahrzeugsteuergerät) • Benötigte Hardware wird bereitgestellt: 2x gewünschter Arduino, 2x CAN-Bus-Shield, 1x Servomotor, 1x Gleichstrommotor, Motorsteuerungs-Shield (Vollbrücken-Treiber für Gleichstrommotor), Leitungen und Zubehör
Haitham A. schrieb: > ist der Servomotor problemlos durch den Pin 5V Arduino zu steuern. der > benötigt 600mA bei 4,6 V und 750 mA bei 6 V. Zu steuern schon, ist ja nur ein Impulsausgang, seine Versorgungsspannung sollt er aber nicht über den aatduino-Spannungsregler beziehen. Auch dein MB80417 Motor eird wohl am L298 nicht glücklich. Du musst prinzipiell die Stromaufnahme der Motoren messen während du sie blockierst, denn das ist die Stromaufnahme im Anlaufmoment und das ist der Strom, den die Elektronik aushalten muss, wenn sie nicht beim etsten Anlaufen kaputt sein soll. Wichtiger als deine Spielzeugbausteine ist die Frage der Masseführung, wie man CAN Busse an ICs anschließt, wie man Bordnetzstörungen überlebt, bis zu welcher zusammenbrechenden Spannung man die Funktion erhalten muss...
MaWin schrieb: > Wichtiger als deine Spielzeugbausteine Ist doch eh nur eine Akademische Spielwiese. Ich habe noch kein reales Getriebesteuergerät ohne Drehzahlsensoren am Ein- und Ausgang gesehen (Messung Schlupf). Außerdem fehlt die Positionsrücklesung (im Regelfall ist diese Redundant ausgelegt). Gruß Anja
Anja schrieb: > Ist doch eh nur eine Akademische Spielwiese. Ist wohl war. Sieht nach einer Studienarbeit aus, wird er schon selbst hinbekommen.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.