Geschätztes Forum,
der Timer1 (16Bit) wird durch ein externes Signal angesteuert, in diesem
Fall mit 12MHz bei 24Mhz µC Takt. Der ATmega misst seine eigene
Taktfrequenz (Flipp-Flopp dazwischen).
Nach 2s wird der Timerwert ausgelesen und anschließend sofort wieder auf
Null gesetzt:
1
LDS FREQENZ_L,TCNT1L ; auslesen LOW
2
LDS FREQENZ_H,TCNT1H ; auslesen HIGH
3
STS TCNT1H,NULL ; Null HIGH
4
STS TCNT1L,NULL ; Null LOW
Problem: In der Zeit zwischen dem auslesen und rücksetzen des
Timers1, das brauch auch einige Takte, zählt der Timer1 knadenlos
weiter, so soll es auch sein.
Nur diese gezählten Impulse werden dann mit "STS TCNT1L,NULL" genullt.
Und es fehlen dadurch ca. 4 Impulse. Bei 24MHz, das sind unzumutbare 4Hz
Ungenauigkeit.
Mir kam folgende Idee:
Nach einer kurzen Pause wird der Timer nochmals auselesen und zur
ursprünglich gemessenen Frequenz dazuaddiert:
1
LDS FREQENZ_L,TCNT1L ; auslesen LOW
2
LDS FREQENZ_H,TCNT1H ; auslesen HIGH
3
STS TCNT1H,NULL ; Null HIGH
4
STS TCNT1L,NULL ; Null LOW
5
6
nop ; Pause
7
nop
8
nop
9
nop
10
11
LDS R0,TCNT1L ; auslesen LOW
12
LDS R1,TCNT1H ; auslesen HIGH
13
add FREQENZ_L,R0 ; addieren
14
adc FREQENZ_H,R1
Das funktioniert schon ganz gut.
Frage: Was haltet Ihr von dieser Variante, gibt es bessere Lösungen?
Bernhard
Bernhard S. schrieb:> Problem: In der Zeit zwischen dem auslesen und rücksetzen des> Timers1, das brauch auch einige Takte, zählt der Timer1 knadenlos> weiter, so soll es auch sein.
Der Profi setzt Zähler deshalb niemals zurück, sondern bildet einfach
die Differenz zur letzte Auslesung.
Beitrag "AVR Timer mit 32 Bit"
Ich würde ihn gar nicht zurück setzen sondern überlaufen lassen und mit
einer Variable vergleichen.
vorher=TCNT1
...
zählen lassen
...
jetzt=TCNT1
diff=jetzt-vorher
...
weiter zählen lassen
...
Mit unsigned Integer Variablen klappt das prima. Es stört nicht, wenn
der Timer zwischendurch überläuft.
Unsicher bin ich allerdings, was passiert, wenn der Timer hoch zählt
während du den LOW und HIGH Anteil ausliest. Da musst du mal ins
Datenblatt schauen. Ich meine mich daran zu erinnern, dass AVR den
Konflikt automatisch (in Hardware) verhindern und man diese beiden
Anteile deswegen in einer ganz bestimmten Reihenfolge auslesen muss.
Dass würde im Umkehrschluss bedeuten, dass dein Lösungsansatz nicht in
Ordnung ist, weil einer der beiden Zugriffe nicht die vorgeschriebene
Reihenfolge einhält.
Um welchen Mikrocontroller geht es konkret?
Für den ATmega328 gilt:
"The Timer/Counter (TCNT1), output compare registers (OCR1A/B), and
input capture register (ICR1) are all 16-bit registers. Special
procedures must be followed when accessing the 16-bit registers."
Und die ist:
"Accessing the low byte triggers the 16-bit read or write operation.
When the low byte of a 16-bit register is read by the CPU, the high byte
of the 16-bit register is copied into the temporary register in the same
clock cycle as the low byte is read.For a 16-bit read, the low byte must
be read before the high byte."
Morgen zusammen
Stefanus hat recht mit der reihenfolge der register. bin darauf auch
schon reingefallen.
Zum Zähler bauen....
Erster Timer der zählt.
Zweiter Timer als Torzeit nehmen...
Ich hab es nicht mehr genau auf dem Schirm, aber da gibt es eine
Verriegelung, dass der eine Timer nur zählt wenn der andere es zulässt.
Damit fallen die paar Zyklen weg, welche du für die Verarbeitung
brauchst.
Damit brauchst du auch kein Assembler mehr, sondern könntest das sogar
in einem langsamen Basic machen.
Gruß Thomas
ATMega1284P mit 24Mhz? Dann habe ich entweder ein altes Datenblatt oder
das ist schon wieder typischer Heimschrauber-Murks mit 20%
Übertaktung... und sich dann am Ende noch aufregen wieso der Scheiß-µC
instabil läuft.
Ben B. schrieb:> Übertaktung... und sich dann am Ende noch aufregen wieso der Scheiß-µC> instabil läuft.
Ich denke, Deine Wortwahl ist etwas verbesserungswürdig^^
Wo steht geschrieben, dass der µC instabil läuft?
Er läuft absolut stabil!
Die Erscheinung, dass er Eingangsimpulse verschluckt, tritt auch
bei 10MHz µC Takt und 4MHz Eingangsfrequenz auf.
Liegt an der momentanen Programmierung, sehr interessante
Lösungsvarianten wurden schon angeboten. Einfach mal lesen ;-)
Nimm lieber eine "Praline" und geh in Dein Zimmer.
> Wo steht geschrieben, dass der µC instabil läuft?> Er läuft absolut stabil!
Abwarten, vielleicht kommt das noch. Ist halt immer etwas riskant wenn
man Teile so weit außerhalb ihrer Spezifikationen betreibt.
Stefan ⛄ F. schrieb:> Ich meine mich daran zu erinnern, dass AVR den> Konflikt automatisch (in Hardware) verhindern und man diese beiden> Anteile deswegen in einer ganz bestimmten Reihenfolge auslesen muss.
Tut er, wie du schon gefunden hast.
Man kann aber auch einfach TCNT1 als 16-Bit-Wert lesen; in iom1284p.h,
includiert über io.h, steht drin:
1
#define TCNT1 _SFR_MEM16(0x84)
Da erledigt das korrekte Lesen der Compiler ...
Wird in anderen 16-Bit-Registern oft auch so gemacht, z.B. ADC bzw. ADCW
enthält bereits den 16-Bit-Wert aus ADCH und ADCL.
Die Methode Differenzmessung funktioniert schon ganz gut,
aber die letzte Ziffer wackelte doch hin und wieder.
Und genau dieses Thema wollte ich noch mit Euch besprechen.
Ursache: Ein Interrupt wird nicht taktgenau ausgeführt, ist z.B. der µC
bei bei der Abarbeitung eines "ret" Befehls (4Takte), kann erst dann der
Interrupt ausgeführt werden, wenn ret abgearbeitet ist.
Folgende Lösungsidee:
Ein Zusatztimer (1:1) läuft parallel mit und immer wenn der
Tor-Interrupt abgearbeitet wird, wird auch der Zusatztimer ausgelesen
und eine Wartezeit berechnet, so dass immer zum exakt gleichen Moment
der Frequenzcounter ausgelesen wird.
Ergebnis: kein zappeln mehr, siehe Video
Vielleicht gibt es bessere Lösungen?
Bernhard S. schrieb:> Ursache: Ein Interrupt wird nicht taktgenau ausgeführt, ist z.B. der µC> bei bei der Abarbeitung eines "ret" Befehls (4Takte), kann erst dann der> Interrupt ausgeführt werden, wenn ret abgearbeitet ist.>> Folgende Lösungsidee:
[...]
Also vorab schonmal: Wie schon von S. Landolt geschrieben, ist die beste
(sogar die einzige wirkliche) Lösung die Nutzung der
InputCapture-Funktionalität des Timers. Damit löst sich das Problem ohne
jegliche Klimmzüge, was kein Zufall ist, weil diese Funktionalität halt
genau für diesen Zweck existiert.
Zu deiner Idee: Das Prinzip deines Ansatzes funktioniert für einige
Sachen, für Capture aber nun gerade nicht. Da verringerst du damit im
Prinzip bloß die messbare Auflösung.
Das allerdings könnte man auch viel einfacher haben, indem du nämlich
einfach bei deinem Messwert die letzten x Bits wegmaskierst. Beim 1284P
würde man x mit 2 ansetzen, jedenfalls so lange im Programm keine
Interruptsperren über mehr als vier Takte vorkommen und es keine
konkurrierenden Interrupts gibt. Sprich: Messwert and ~3 und gut isses.
Ein funktionsgleiches Äquivalent zu dem von dir gezeigten Programm wäre
übrigens mit x = 4, also Messwert and ~$f. Also eine Instruktion statt
23...
Nur die Hardware-Routine Input-Capture vermeidet Fehler durch
Interrupt-Reaktionszeiten bei der Timer-/Counter-Erfassung.
Und selbst die hat schon den "Digitfehler" +/-1, von dem man
mittlerweile schon in der Grundschule gehört haben sollte.
Alles Andere KANN nicht genauer, als +/- 1 Takt sein, aber gern
viel ungenauer.
Selbst wenn das Hauptprogramm nur aus einer Schleife mit 1-Takt-
Befehlen besteht, kann der Interrupt beim Rücksprungbefehl
auftreten - und der dauert 2 Takte. Sind weitere Interrupts
möglich, wird die Reaktionszeit auch noch von der (zeitlichen) Länge
der anderen Interruptroutinen abhängig...
Input-Capture bedeutet natürlich, dass man genau diesen Anschluss
für Input-Capture nutzen muss.
Wenn du das nicht kannst, oder willst - dann geht es eben nicht
genauer. IST SO. FERTIG.
Ansonsten dachte ich, dass die Übertakterei seit ca. 20 Jahren
Kinderkram und out of fashion ist. Aber Dummheit stirbt nicht aus...
Wer nicht die simpelsten Regeln für flottes und exaktes Programmieren
drauf hat, schafft mit 24 MHz eher weniger, als andere mit 4...8 MHz.
S. Landolt schrieb:> Falls PD6 und Timer2 frei sind: wie wäre es mit Input-Capture?
Könnte mir mal bitte jemand mit einfachen Worten erklären, wie
Input-Capture funktioniert? Ich hab da noch nicht so den Durchblick :-(
Anfänger schrieb:> Könnte mir mal bitte jemand mit einfachen Worten erklären, wie> Input-Capture funktioniert?
Der Zähler läuft mit einer festen Taktfrequenz durch (incl, Überläufen).
Ein externes Signal gibt den "Capture" Befehl. Dann kopiert der Zähler
den aktuellen Zählerstand in ein Register und löst einen Interrupt aus.
Die Software kann das Register dann in aller Ruhe auslesen.
Bei einem Frequenzzähler würdest du z.B. bei jeder steigenden Flanke
capturen. Dann musst nur die biden gecapturten Zählerstände voneiannder
subtrahieren.
an Anfänger (& Bernhard S.):
Hier im konkreten Fall möchte Bernhard S. zwei Sekunden lang ankommende
Impulse zählen; er benutzt dazu den Timer1 mit seinem Eingang T1 (=
PB1). Problem dabei: er erzeugt die 2 s per Software und Interrupt,
dabei entstehen unterschiedlich lange Verzögerungen. Lösung: die 2 s
per Hardware erzeugen, z.B. per Timer2 mit 'Toggle OC2A on Compare
Match' - passenderweise ist dieser Ausgang OC2A gleichzeitig der Eingang
ICP1 (Input-Capture) des Timer1. Bei einer Flanke an diesem Eingang wird
ICR1 = TCNT1 gesetzt, und man kann den ausgelesenen Zählerstand
weiterverarbeiten, ganz ohne Sorge um einzelne Takte bzw. verschiedene
Latenzen - man hat ja (fast) alle Zeit der Welt (mehrere zehntausend
Takte, um genau zu sein).
(da hatte mir doch der Osterhase ein o geklaut)
Ganz konkret: Timer2 mit CTC auf OCR2A=250, bei Vorteiler 128, ergibt
32000 Takte, bei Bernhard S.' 24 MHz werden für 2 s folglich 1500
Durchläufe benötigt. Bei jedem Durchlauf wird noch auf eventuellen
Überlauf von ICR1 geprüft, am Ende die Differenz gebildet - fertig:
fortlaufende Messung (in aller Ruhe), bei minimaler
Controllerauslastung.
Wir haben hier zwei unterschiedliche Ansätze. Ich bezog mich im Beitrag
Beitrag "Re: Problem 16Bit Timer auslesen und zurücksetzen für Frequenzzähler ATmega1284p Assembler" auf eine konstante
hohe Taktfrequenz, wo die Takte zwischen zwei Flanken eines sehr viel
langsameren Signals gezählt werden.
S. Landolt beschreibt den umgekehrten Weg, so das zu messende Signal den
Takt liefert und dieser in einem festen Zeitfenster gezählt wird, das
durch einen zweiten Timer vorgegeben wird. Dieses Verfahren eignet sich
für hohe Frequenzen - passt hier also besser.
Nun, Sie haben eine Periodenmessung (Reziprokzähler) beschrieben, aber
für unseren Anfänger bleibt der Trick bei Input-Capture ja derselbe:
bildlich gesprochen wird per Hardware eine Momentaufnahme der
Zählerstandes gemacht.
S. Landolt schrieb:> Nun, Sie haben eine Periodenmessung (Reziprokzähler) beschrieben,> aber für unseren Anfänger bleibt der Trick bei Input-Capture ja derselbe:> bildlich gesprochen wird per Hardware eine Momentaufnahme der> Zählerstandes gemacht.
Ja, das ist der gemeinsame Kern.
Von einem guten Frequenzzähler würde erwarten, dass er beide Verfahren
unterstützt, so daß er auch niedrige Frequenzen (< 100 Hz bis weit unter
1 Hz) mit zufriedenstellender Auflösung messen kann.
Etwas Wasser muss ich trotzdem in den Wein gießen...
Input-Capture hat den Nachteil, dass zwei wertvolle Prozessor-Pins,
welche auch nicht umprogrammierbar sind, geopfert werden müssen.
Bernhard S. schrieb:> Input-Capture hat den Nachteil, dass zwei wertvolle Prozessor-Pins,> welche auch nicht umprogrammierbar sind, geopfert werden müssen.
Naja, nur wenn du zwei Kanäle messen willst, bei einem Kanal ist es halt
nur ein Pin.
Und es ist ja ausserdem nicht so, dass der zusätzlich benötigt wird,
sondern anstatt irgendeines anderen Pins, nämlich den, über den du im
Moment dein zu messendes Signal einspeist. Dieser andere Pin wird ja
dann frei.
Bernhard S. schrieb:> 1.Pin Signaleinspeisung>> 2.Pin Input Capture>> 3.Pin Steuerung für Input Capture>> Sind 3 Pins, momentan nur 1 Pin🤔
Mir scheint, du hast die Sache nicht wirklich kapiert.
1. ersetzt du schlicht durch 2.
3. braucht man nicht, wozu soll das gut sein?
Was will er denn nun?
Erst wird gefragt, wie man Frequenz- und Zeiterfassung in einem
ATMega verbessern kann.
Klare Ansage: Hardware-Erfassung mit Input-Capture vermeidet alle
nicht vorher berechenbaren Interrupt-Verzögerungen.
Dann wird gequengelt, dass man sich Input-Capture erst mal anlesen
muss - und sich auch noch für den vorliegenden Fall eine
Programmier-Strategie ausdenken muss.
Dann wird ein Video gezeigt, in dem keine letzte Stelle wackelt,
obwohl darüber diskutiert werden muss! ... (?)
Dann wird gejammert, (offensichtlich ohne dass im Datenblatt
Input-Capture studiert wurde, oder gar die Anwendungsstrategie
überdacht wurde), dass damit plötzlich 3 mal so viele Pins benötigt
werden. - Was grundsätzlich schon mal Quatsch ist.
Selbst wenn: Genauigkeit gibt es nicht umsonst! Unter gegebenen
Bedingungen kostet es aber MANCHMAL nur etwas Flexibilität und
Gehirn-Einsatz...
Da fehlt nicht mehr viel am Troll
Bernhard S. schrieb:> 2.Pin Input Capture>> 3.Pin Steuerung für Input Capture
Sollte ich mich tatsächlich bei
> Falls PD6 und Timer2 frei sind ...
bzw.
> passenderweise ist dieser Ausgang OC2A gleichzeitig> der Eingang ICP1 (Input-Capture) des Timer1
missverständlich ausgedrückt haben? Das täte mir leid.
c-hater schrieb:> Bernhard S. schrieb:>> 1.Pin Signaleinspeisung>>>> 2.Pin Input Capture>>>> 3.Pin Steuerung für Input Capture>>>> Sind 3 Pins, momentan nur 1 Pin🤔>> Mir scheint, du hast die Sache nicht wirklich kapiert.>> 1. ersetzt du schlicht durch 2.> 3. braucht man nicht, wozu soll das gut sein?
Denke schon, dass Bernhard S. recht hat:
1. Ist die vom externen Teiler-FF kommende Frequenz (<= halbe
CPU-Frequenz), die es zu messen gilt (an Pin T1 oder Pin T3).
2. Ist der Capture-Eingang (ICP1 oder ICP3) des hierfür verwendeten
16-Bit-Counters.
3. Ist der Ausgang vom exakten 2-Sekunden-Timer (irgend ein OCxy).
Der Capture-Mode geht bei ATmega1284 (und ATmega328 et al) leider nur
mit einem 16-bit-Counter (nur für diesen gibt es einen ICP-Eingang), der
aber andererseits auch sehr hilfreich wäre, um ein exaktes
2-Sekunden-Capture-Signal zu erzeugen. Beides gleichzeitig geht nur bei
ATmega1284 (zusätzlicher TCNT3, ebenfalls mit einem ICP-Eingang).
Doch für genaue Frequenzmessungen bis zur halben CPU-Frequenz geht es
auch ohne Capture-Mode, sofern man einen präzisen Timer für die 2
Sekunden Messzeit verwendet. Und das klappt eben möglichst einfach mit
einem 16-Bit-Timer [1].
Allerdings muss der CPU-Takt dann wegen dem für exakte 2 Sekunden
nötigen Vorteiler von 1024 ein Vielfaches von 512 sein (sonst die
CPU-Frequenz ggf. per Trimmer auf ein Vielfaches von 512 justieren).
Wenn man für den 2-Sekunden-Timer TCNT1 verwendet, kann man genaue
Messungen ohne Capture-Mode sogar mit einem ATmega328 durchführen.
Dann bleibt beim ATmega328 zum genauen Zählen aber nur noch ein
8-Bit-Zähler, z. B. TCNT0, dessen Überlauf man dann per TOV-Interrupts
in AVR-Registern akkumuliert, mit dem kleinen Nachteil, dass die
Interrupts deutlich öfter auftreten. Aber man muss ja nur sehr wenige
Befehle ausführen, nämlich 3 Register inkrementieren (und natürlich das
Statusregister retten).
Beim ATmega1284 hat man den Luxus eines zweiten 16-Bit-Zählers. Falls
dieser noch frei ist, wird die Angelegenheit wirklich sehr entspannt, da
man deutlich seltener und nur zwei AVR-Register (oder ein
Doppelregister) inkrementieren muss.
Damit wirklich kein Zählimpuls verloren geht (insbesondere nahe der
halben CPU-Frequenz), wird man auch ohne Capture-Mode die
Differenzmethode verwenden [2]: Messfrequenz = neuer Zählerstand minus
alter Zählerstand, ohne Rücksicht auf die absoluten Werte.
Das ist selbst in Assembler-Spache eine einfache Übung.
Fazit: Das Messen von Frequenzen bis nahe der halben CPU-Frequenz geht
per ATmega1284 (und ATmega328 et al) auch ohne Capture-Mode 100% exakt
(ohne dass Zählimpulse verloren gehen), sofern man die Differentmethode
verwendet.
[1] Ein exaktes 2-Sekunden-Capture-Signal mit einem 8-Bit-Timer zu
realisieren, wäre einiges an Mehraufwand.
[2] Sonst verliert man bei Messungen nahe der halben CPU-Frequenz wegen
getrennten Befehlen für Lesen und Löschen eines 8-Bit-Zählers im Mittel
genau einen Zählimpuls, beim 16-Bit-Zähler entsprechend mehr.
Eberhard H. schrieb:> Fazit: Das Messen von Frequenzen bis nahe der halben CPU-Frequenz geht> per ATmega1284 (und ATmega328 et al) auch ohne Capture-Mode 100% exakt> (ohne dass Zählimpulse verloren gehen), sofern man die Differentmethode> verwendet.
Das kommt schlicht auf deine Definitionen von "genau" und "exakt" an.
Wenn keine ISRs benötigt werden, und es auch sonst auf ein paar
CPU-Zyklen mehr oder weniger nicht ankommt, geht das. Wenn nicht, dann
nicht.
Oliver
Oliver S. schrieb:> Das Eingangssignal muß natürlich an den ICP-Pin.> 1.) entfällt damit.> Und wofür soll 3.) sein?
1.) Bernhard S. misst nicht die Periodendauer, sondern zählt die an T1
oder T3 anliegenden Impulse, nicht an ICP.
3.) Ist das exakte 2-Sekunden-Signal, denn für bis zu 20 MHz (und mehr)
auf die letzte Stelle muss man eben 2 Sekunden lang zählen, wenn der
halbierte Takt an T1 bzw. T3 anliegt.
Oliver S. schrieb:> Das kommt schlicht auf deine Definitionen von "genau" und "exakt" an.
Bernhard S. möchte es offensichtlich bis auf das letzte Bit genau.
Wie ich geschrieben habe, geht das auch ohne Capture-Mode (und mit
Capture-Mode sowieso).
Aber ganz ohne Interrupts geht es zweifellos generell nicht.
Eberhard H. schrieb:> Wie ich geschrieben habe, geht das auch ohne Capture-Mode
Das schriebst du.
Nur, schreiben kann man viel, wenn der Tag lang ist.
Also schreib doch mal, wie man auf einem AVR CPU-zyklengenau eine
beliebige Zeit zwischen zwei Flanken messen kann, ohne den Capture-Mode
zu benutzen.
Oliver
Wer sagt denn, dass mal einen Interrupt verwenden muss, um das
2-Sekunden Fenster abzustecken?
Wenn ich alle Interrupts sperre, kann ich Zeitspannen taktgenau mit
Warteschleifen umsetzen.
* Timer auf 0 setzen
* exakt 2 Sekunden warten
* Timer auslesen
Wo ist das Problem?: Dass der µC in der Zwischenzeit nichts anderes tun
kann. Das kann bei so einem Gerät durchaus akzeptabel sein.
Stefan ⛄ F. schrieb:> Wo ist das Problem?: Dass der µC in der Zwischenzeit nichts anderes tun> kann. Das kann bei so einem Gerät durchaus akzeptabel sein.
Wenn du unter „Taktgenau“ wirklich auf genau eine Takt genau meins, will
ich das sehen.
Die Befehle eines AVR brauchen nunmal unterschiedlich lang, und damit
kann man immer ein- oder zwei Zyklen Abweichung in die Auswertung
bekommen. In der Praxis spielt das bei zwei Sekunden Messzeit keine
Rolle, aber „taktgenau“ im Sinne von „auf einen CPU-Takt genau“ geht
halt nicht.
Oliver
Oliver S. schrieb:> Die Befehle eines AVR brauchen nunmal unterschiedlich lang, und damit> kann man immer ein- oder zwei Zyklen Abweichung in die Auswertung> bekommen.
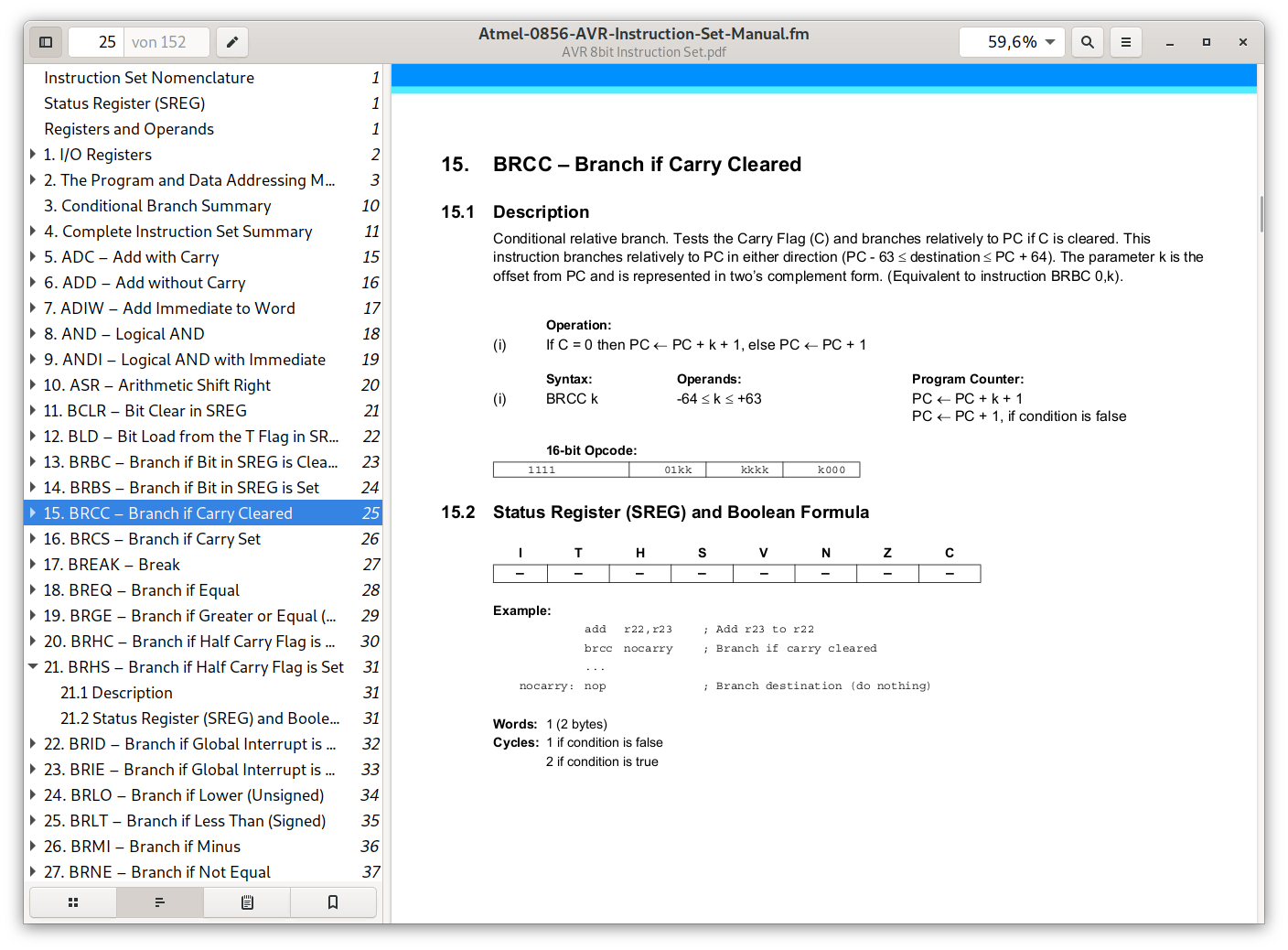
Du meinst vielleicht Befehle wie BRCC. Bei einer Schleife mit 100
Wiederholungen braucht dieser Befehl genau 99*2 + 1 Takt. Daran ist
nichts zufällig, alles ganz leicht im voraus berechenbar.
Ok, wir reden aneinander vorbei.
Ich rede von der Eberhard-Lösung mit einem externen 2-Sekundensignal,
auf das er in Software ohne ICP taktgenau reagieren will.
Oliver
Oliver S. schrieb:> Ok, wir reden aneinander vorbei.>> Ich rede von der Eberhard-Lösung mit einem externen 2-Sekundensignal,> auf das er in Software ohne ICP taktgenau reagieren will.
Ich dachte der Satz wäre klar gewesen:
Stefan ⛄ F. schrieb:> Wenn ich alle Interrupts sperre, kann ich Zeitspannen taktgenau mit> Warteschleifen umsetzen.
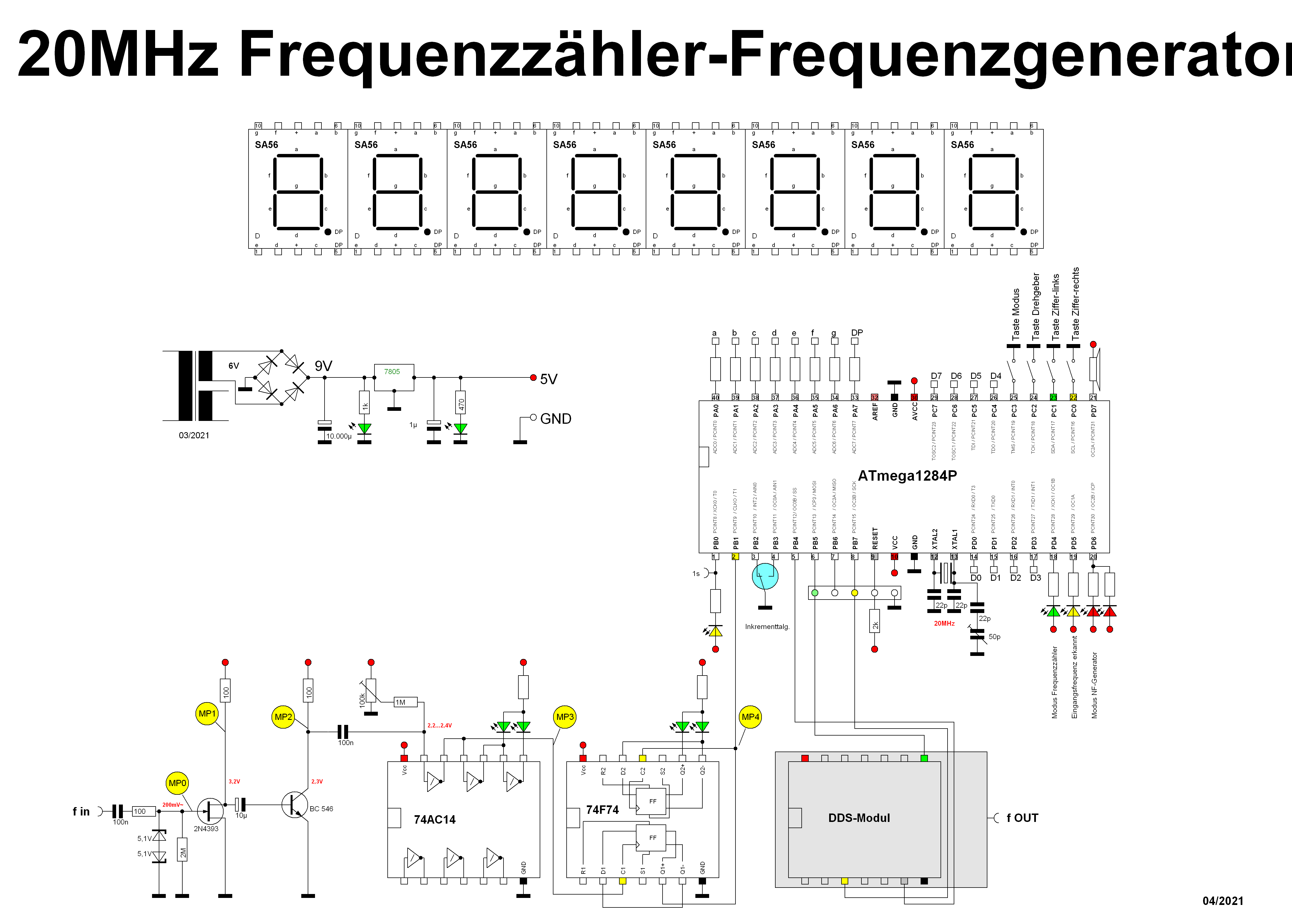
Momentane Lösung:
Halbierte Eingangsfrequenz taktet den 16Bit Timer1 (Zähler).
Der 8Bit Timer (Timer0) sorgt dafür, dass taktgenau alle 2 Sekunden
der Timer1 ausgelesen wird, nach der Differenzmethode wird dann die
Frequenz berechnet. Nebnebei noch Multiplex für LED, Drehgeber und
Tasten abfragen, 1s Ausgang für Kalibrierung mit DCF-Signal usw.
Der 8Bit Timer (Timer2), als Control-Timer wird benötigt, um taktgenau
die Frequenz auszulesen.
Bei 24Mhz Takt, jetzt könnt Ihr mich ruhig wieder prügeln, und 24MHz
Eingangsfreuenz, werden exakt 24.000.000Hz angezeigt, nix geht
verloren^^