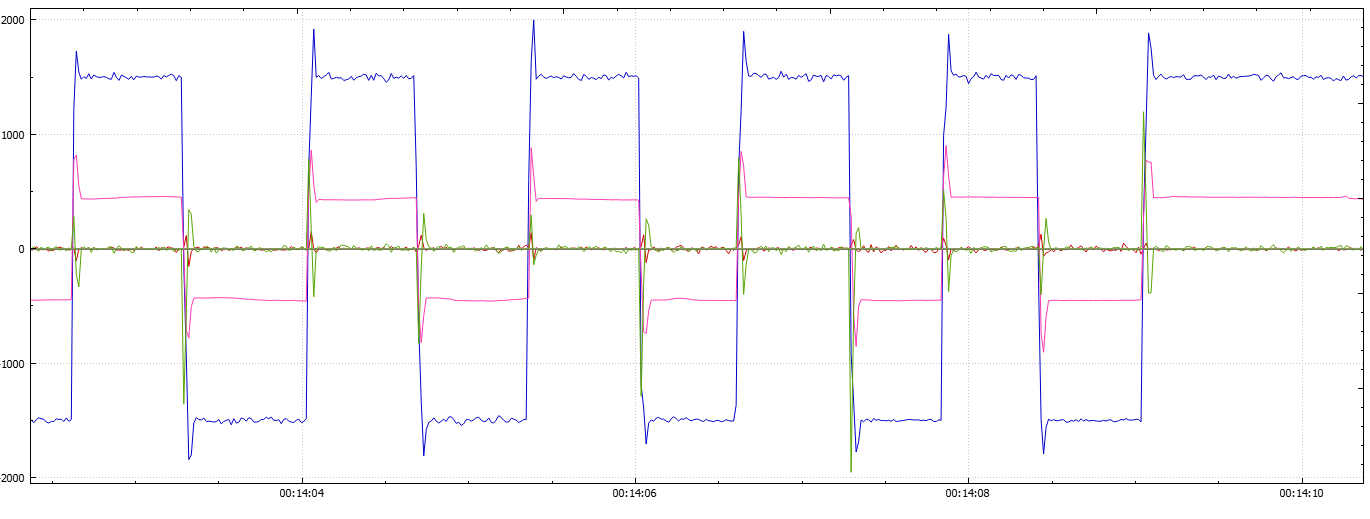
Hi Wie im Anhang zu sehen, habe ich Überschwinger beim Iq Strom bei sehr schnellen transienten. Zur Abbildung: blau = Iq, rot = Id, pink = Iq_Integrator_Sum, grün = Iq_err (ref - ist). Der Referenzwert ist 1.5A und die Motorachse wird fixiert, dann bekommt der Motor einen Referenzstrom von +-1.5A und man sieht den Überschwinger, verursacht durch den Integrator. Die Regelfrequenz beträgt 10kHz, das sollte sicher genug schnell sein. Die Parameter wurden so gewählt, dass der Motor eigentlich ein System 1ter Ordnung bilden sollte (Pole-Zero Cancellation), wie es üblich ist: Kp = L * bandwidth Ki = R * bandwidth Wobei ich die Bandbreite um die 500rad/s wähle. Jemand eine Idee, was die Überschwinger verursachen könnte? Die Überschwinger sollten doch eigentlich nur passieren, wenn das System nicht erster Ordnung ist, sprich mein L und R sind falsch (wurde aber verifiziert) oder können nicht lineare Effekte den Regler auf die gleiche Weise beeinflussen, sprich wenn die Motorkonstante nicht mehr linear wird?
Angehängte Dateien:
-

Ueberschwinger.png
74 KB
Ist der reglerausgang transient in der Sättigung? Wenn ja, hat der regler anti windup?
Angehängte Dateien:
-

Kein_Ueberschwinger.png
51 KB
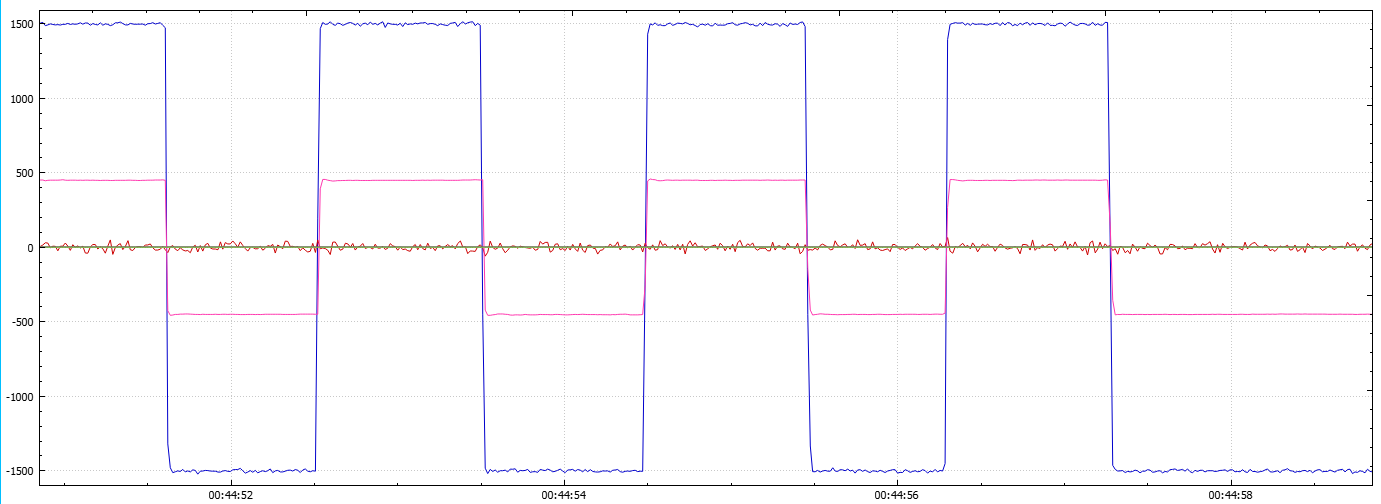
Ok, die Motorachse konnte nachrutschen und war nicht gut fixiert, bei perfekt fixierter Achse habe ich keinen Überschwinger. Jedoch frage ich mich jetzt, wieso der Überschwinger nur vorhanden ist, wenn sich die Achse leicht bewegen kann? Klar, der Integrator hat einen Anti Wind-Up und kommt hier nicht mal ansatzweise in die Sättigung (VCC/2).
Angehängte Dateien:
-

Full_Speed_Stop.png
100 KB
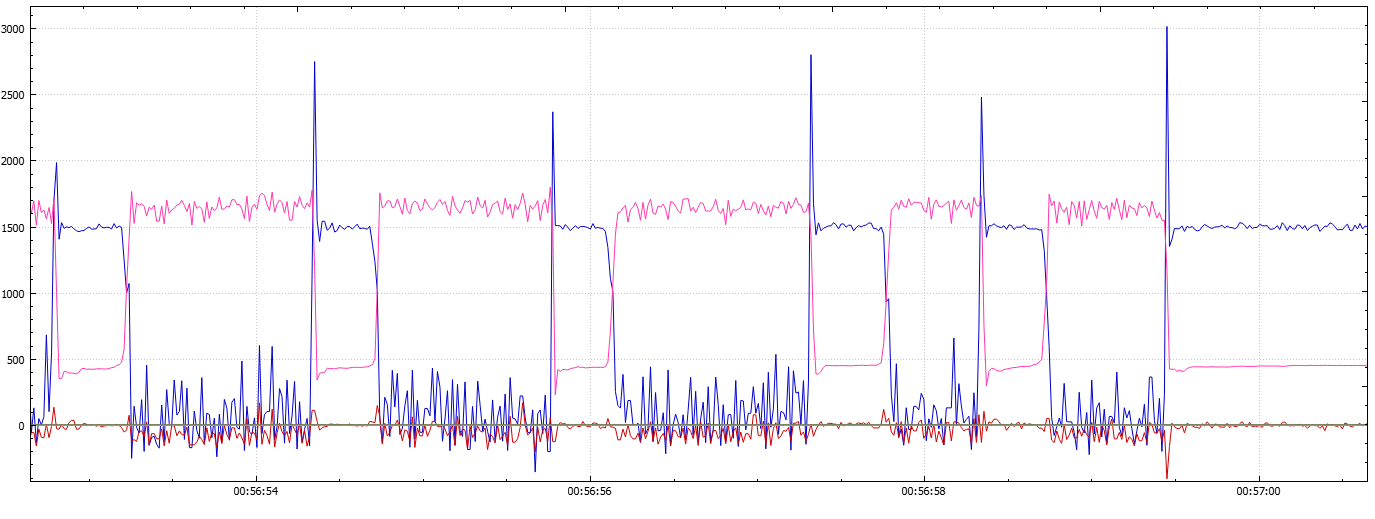
Ok, es scheint mit der Geschwindigkeit zusammenzuhängen. Wenn ich den Motor bei 3000rpm laufen lasse, und dann mit einer externen Bremse sofort blockiere, dann sieht es wie im Anhang aus. Sieht doch nach nicht linearem Betrieb aus, oder? Der Regler macht ja eigentlich alles richtig, jedoch bremst der Motor eigentlich in ein paar ms und der Integrator braucht halt etwa 50ms um sich voll zu entladen, daher der Peak. Jemand eine Idee, was man dagegen tun kann? Wenn ich die Bandbreite erhöhe, wird das Rauschen zu stark.
Bert S. schrieb: > Ok, die Motorachse konnte nachrutschen und war nicht gut fixiert, bei > perfekt fixierter Achse habe ich keinen Überschwinger. Jedoch frage ich > mich jetzt, wieso der Überschwinger nur vorhanden ist, wenn sich die > Achse leicht bewegen kann? Ist doch offensichtlich, du bekommst dann das Zeitverhalten deines Winkelgebersystems zu spüren.
Hmm ok, du meinst die Verzögerung vom Encoder? Ich kann mir das aber fast nicht vorstellen, denn diese bewegt sich im us Bereich und die Überschwinger werden klar vom Regler erkannt, jedoch ist der Integrator einfach nicht schnell genug. Wenn ich oben die Bandbreite erhöhe, kann ich die Peaks stark reduzieren, sprich bei der doppelten Bandbreite wo oben, sind die Peak auch nur noch etwa halb so groß. Gibt es evtl. eine Technik, wie man solch schnelle transienten in den Regler als Störgröße einführen kann? Hat jemand evtl. ein FOC System bereit und könnte prüfen, ob das Verhalten normal ist?
Du hast mich falsch verstanden. Die Gleichung im Rotorsystem ist immer noch U = R*I + L*dI/dt + j*Omega*L*I + j*Omega*Psi. Und du betrachtest nur R*I + L*dI/dt. Das das funktioniert wenn der Schaft festblokiert ist ist offensichtlich. Aber wenn der sich Drehen kann kommt zu einen das Zeitfehalten des Winkelgebersystems zum tragen weil der Winkel den deine FOC annimmt dem realen Winkel nacheilen wird und die Winkelgeschwindigkeit ist auch nicht == 0. Und davon weiß dein Reglersystems nichts. Wenn du diese Überschwinger bei der Bandbreite weg haben willst musst du den Regler Komplex auslegen als I = Id + j*Iq usw. annehmen und dann deine Reglerauslegung machen. TI macht das in der FCL Lib z.B. so: https://www.ti.com/lit/an/spracl1b/spracl1b.pdf Da ist natürlich viel Bla drin aber um das Prinzip zu verdeutlichen nicht schlecht. Es gibt auch diverse Veröffentlichungen zur Komplexen Stromregelung bei FOC.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.