Mahlzeit,
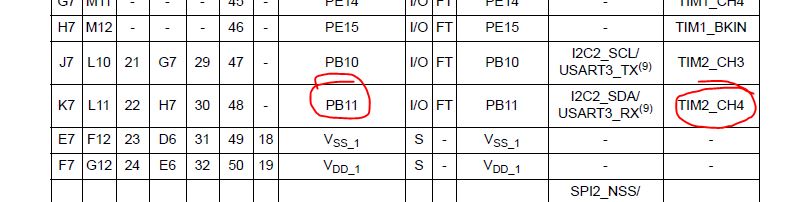
vielleicht nur eine Kleinigkeit aber aus Pin PB11 kommt zum Verrecken
kein Signal raus.
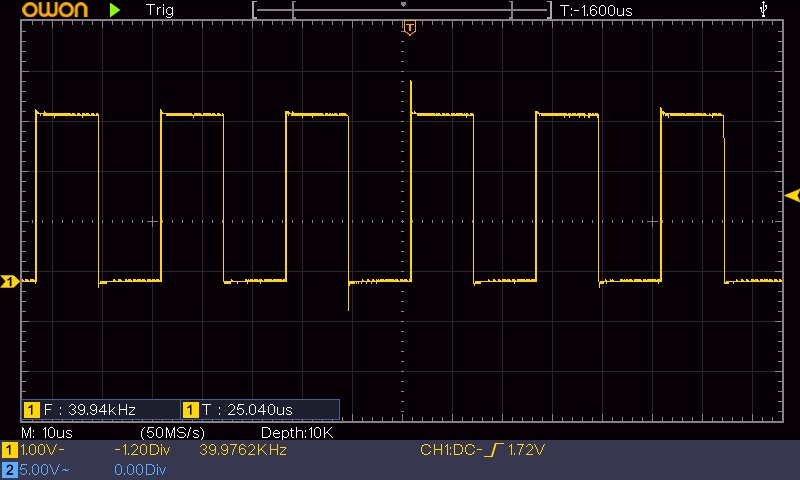
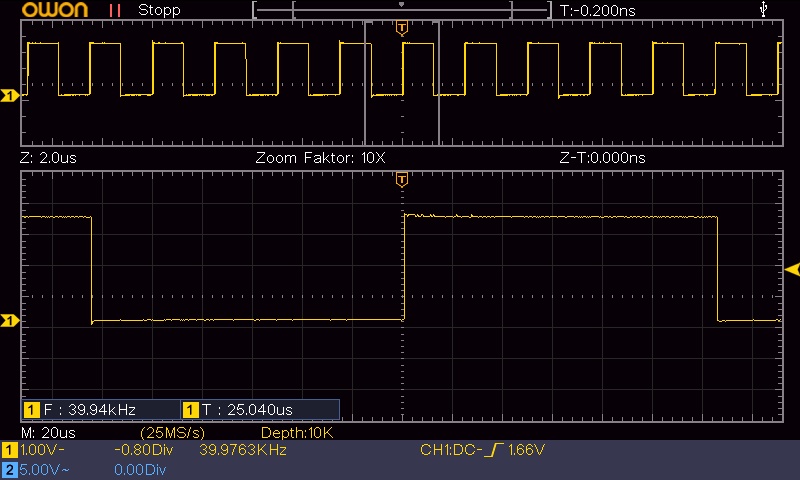
Ziel: 40 Khz Frequenz mit 50% Duty Cyle
Takt: 56 Mhz
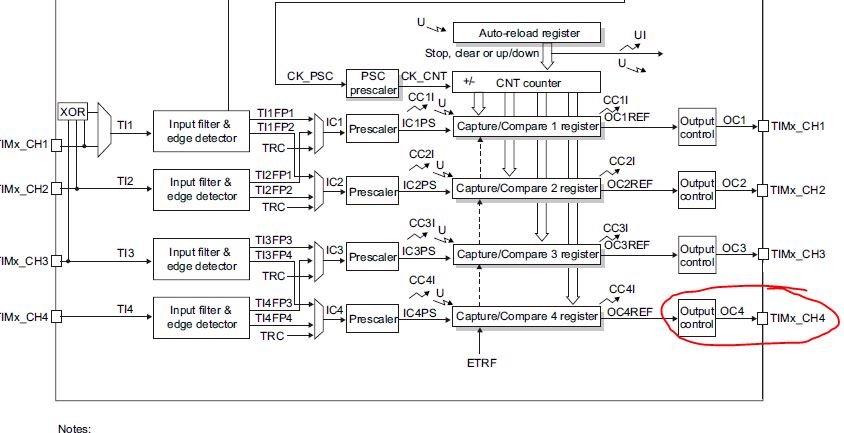
Hardware: Timer 2, Compare Kanal 4.
Reload berechnet zu 56Mhz / 40Khz = 1400 Takte. Also geht ohne
Prescaler.
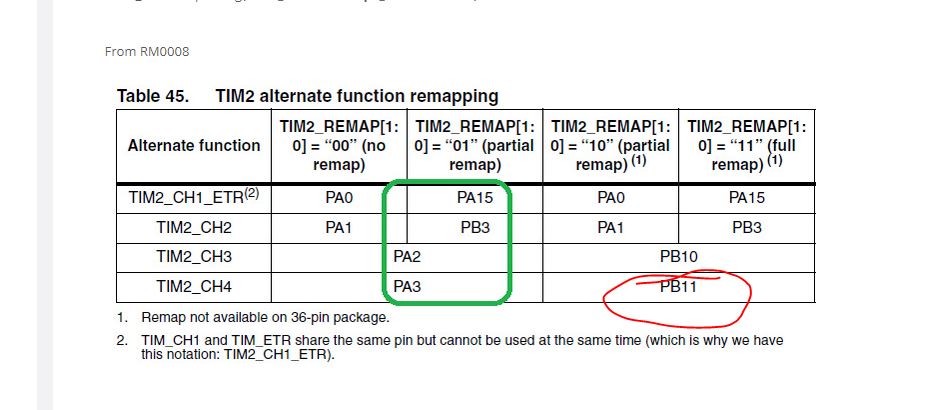
PB11 ist Remapped, ok, man muss was umschalten. Gibt da die
Möglichkeiten
GPIO_PartialRemap1_TIM2 : TIM2 Partial1 Alternate Function mapping
GPIO_PartialRemap2_TIM2 : TIM2 Partial2 Alternate Function mapping
GPIO_FullRemap_TIM2 : TIM2 Full Alternate Function mapping
Alles durchprobiert, auf dem Oszi ist nichts zu sehen? Habe ich was
übersehen? Doppelt gemoppelt?
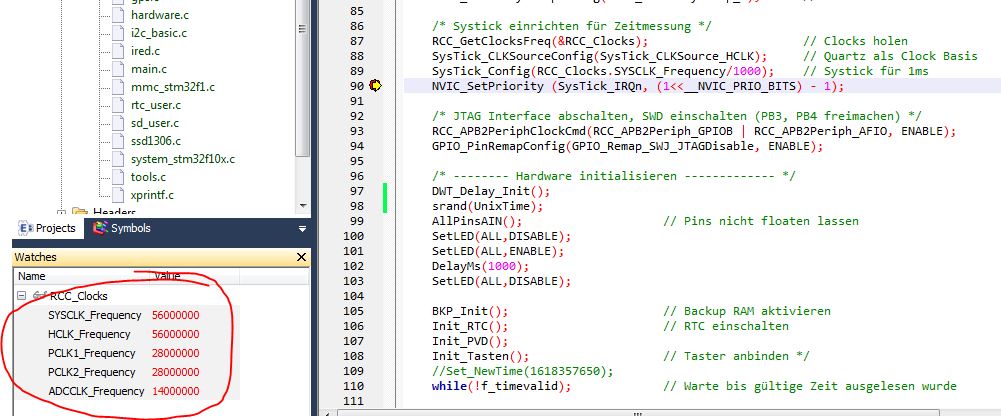
Nebenbei: Mein APB2 Bus läuft mit 1/2 HSE Sysclock, also 28Mhz.
Seltsamerweise aber laufen die Timer mit SystemCoreClock. Dahinter bin
ich auch noch nicht gekommen, warum das so ist. CLK_DIV sind nämlich nur
Glitch-Filter. Aber woher der TIM2 seinen Clock kriegt... ?
1
/* Stellt auf Timer 2, Ausgang PB11, TIM2_CH4 ein 40khz Signal bereit */
2
3
uint16_treload;
4
voidInit_Timer2_PWM()
5
{
6
#define FREQ 40000 // 40 Khz für IRED, 20khz für Überlauf;
7
8
TIM_TimeBaseInitTypeDefTimerBaseInitStructure;
9
GPIO_InitTypeDefGPIO_InitStructure;
10
11
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);// Timer mit Clock versorgen
Keiner der STM32 Päpste da? :-(
Ich habe ein Signal, GPIO_PinSource_11 mit GPIO_Pin_11 vertauscht. Und
noch einiges dazu gesucht aus dem Netz aber verstehen warum es läuft tue
ich leider nicht :-((
Nachdem es lief strich ich nach und nach Befehle weg und es klappt immer
noch, auch ohne das unten auskommentierte. Was mich ziemlich wundert,
denn die API wurde ja sinnvoll geschrieben.
Der ist notwendig:
TIM_CtrlPWMOutputs(TIM2,ENABLE);
die nicht:
TIM_SelectOCxM(TIM2,TIM_Channel_4,TIM_OCMode_PWM1);
TIM_CCxCmd(TIM2,TIM_Channel_4,TIM_CCx_Enable);
TIM_OC4PreloadConfig(TIM2, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM2,ENABLE);
Wenigstens der TIM_CCxCmd sollte nötig sein... bei ARM wird ja alles
irgendwie enabled.
Rätsel über Rätsel.....
1
uint16_treload;
2
voidInit_Timer2_PWM()
3
{
4
#define FREQ 40000 // 40 Khz für IRED, 20khz für Überlauf;
5
6
TIM_TimeBaseInitTypeDefTimerBaseInitStructure;
7
GPIO_InitTypeDefGPIO_InitStructure;
8
9
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);/* Timer 2 mit Clock versorgen */
Pieter schrieb:> ich bin nicht der Papst, aber TIM2 bekommt seinen Clock über APB1.
Der taktet nachweislich hier bei mir mit SystemCoreClock HCLK AHB =
(56 Mhz) und nicht mit 28Mhz, da ich beide P-Busse auf 1/2 HCLOCK
getaktet habe, weil APB1 = HCLK mir die SPI zu schnell macht, da komme
ich mit /64 nicht unter 400khz. APB2 ist ja von haus aus nur max. 36
Mhz.
Sonst würden ja auch keine 40khz bei rauskommen, weil ich mit 56Mhz /
40khz reloade.
Eines der großen Rätsel dieser Zeit....
Zum Rest... dieser IniStruct scheint eine Sache zu sein, manches daraus
lässt sich auch einzeln aufrufen da sie alle auf TIMx-CER wirken. Im
Struct setzt man nur alles auf einmal und ist fertig.
Ich hoffe mal, dass ich die PWM so richtig abschalte, man kann auch den
Timer anhalten, PWM abklemmen usw. Aber ich muss bei Idle auf Low
liegen, sonst brennt mir die IRED durch.
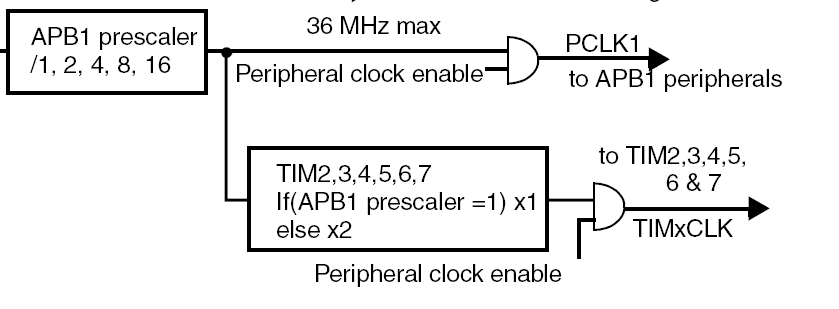
>>Der taktet nachweislich hier bei mir mit SystemCoreClock HCLK AHB =>>(56 Mhz) und nicht mit 28Mhz, da ich beide P-Busse auf 1/2 HCLOCK>>getaktet habe, weil APB1 = HCLK mir die SPI zu schnell macht, da komme
der macht genau das was er soll!
Anbei ein Bild aus der Doku.
Wenn Du APB1 :2 wegen SPI teilst, wird der Takt für TIMx wieder
verdoppelt.
In Pascal habe ich ein PWM an T4C1 so realisiert:
Procedure Init_Tim4( P, A : Word );
Begin
// Timer4_CH1 für die Frequenz F ( aus Clock/ P ) an PB6 einrichten
RCC_APB2ENR.IOPBEN = 1; // GPIOB Clock on
GPIOB_CRL = ( GPIOB_CRL and 0xF0FFFFFF ) or 0x0B000000; //
PB6 as AF-PP
RCC_APB1ENR.TIM4EN = 1; // Enable clock gating for timer4
TIM4_CR1.B0 = 0; // Bit0, CEN, Disable timer
TIM4_PSC = P-1;
TIM4_ARR = A-1;
TIM4_CCR1 = ( TIM4_ARR +1 ) / 2;
TIM4_CCER = 3; // OC1 signal is output on the
corresponding output pin. PB6
TIM4_CCMR1_Output = 0x6C;
TIM4_CR1.B0 = 1; // Bit0, CEN, Enable timer
End;
Man muss uebrigens nicht unbedingt Pascal benutzen, um die
Register so zu initialisieren. Das geht mit dem Headerfile
ganz ohne merkwuerdige Initstructs auch in C.
Mit dem Referenzmanual ist das Initialisieren durchaus
straightforward und allerschnellstens erledigt.
Christian J. schrieb:> /* Schaltet die 40khz ein oder aus */> void IRED_40khz(FunctionalState status)> {> if (status)> TIM_CCxCmd(TIM2,TIM_Channel_4,TIM_CCx_Enable);> else> TIM_CCxCmd(TIM2,TIM_Channel_4,TIM_CCx_Enable);> }
Beide Funktionen machen hier genau das gleiche - status ist wurscht. Das
ist sicher nicht, was du möchtest.
Matthias S. schrieb:> Beide Funktionen machen hier genau das gleiche - status ist wurscht. Das> ist sicher nicht, was du möchtest.
Solche Sachen sind schnell behoben. Und ich bin absolut kein Fan davon
irgendwelche Register mit Zahlen zu beschreiben, wenn es eine API gibt,
die zehntausendfach verwendet und bewährt ist und wo es keiner
Kommentare bedarf um zu verstehen, was da gemacht wird.
Der Hinweis mit dem APB1 Bus war gut, das hatte ich auch echt übersehen!
Faszinierend an der Reference ist, dass man sich tot sucht, um heraus zu
finden, wieviele Timer der F103 überhaupt hat, da zig Varianten in einem
Manual verquickt sind.
So muss es ausschauen, dann schnubbeln die Bytes auch durch die Luft in
meinen Debug Empfänger rein. Sieht cool aus mit einem Handy als Kamera
und wie zu Modemzeiten mit 2400 baud und einem Terminal-Programm.
1
#ifdef IRED_TRANSMIT
2
#define BURST 410 /* 410us Burst Länge */
3
voidInit_Timer2_PWM()
4
{
5
#define FREQ 40000 // 40 Khz für IRED, 20khz für Überlauf;
6
7
TIM_TimeBaseInitTypeDefTimerBaseInitStructure;
8
TIM_OCInitTypeDefTIM_OCInitStructure;
9
GPIO_InitTypeDefGPIO_InitStructure;
10
11
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);/* Timer 2 mit Clock versorgen */
Christian J. schrieb:> Solche Sachen sind schnell behoben.
Ich benutze ja auch SPL und kein Cube Kram, aber du solltest einfach ein
wenig sorgfältiger coden. Der Syntaxfehler im ersten Posting sollte dir
eigentlich sofort aufgefallen sein. So gings mir jedenfalls.