Guten Abend, ich bin relativ neu im Thema digitale Signalverarbeitung und habe Probleme mit meinem Integrator. Zur Anwendung: Grob gesagt geht es darum an einem Prüfstand mittels eines Piezos die Druckänderung zu messen und aus dem Druckänderungssignal den Druck zu ermitteln. Als Messaufnehmer verwende ich eine Verstärkerschaltung und einige Operationsverstärker, die das Signal konditionieren und der ADC eines STM32 nimmt das Signal dann auf (12Bit). Das Signal wird mit 1kHz an einen PC gesendet, wo die weitere Verarbeitung stattfindet. Aber das nur am Rande, wo der Filter gerechnet wird, ändert am Prinzip ja wenig. Im Verlauf der Versuche wird der Piezo über einige Sekunden mit konstanter Drucksteigerung beaufschlagt, bis ein eingestellter Zieldruck erreicht ist, das Profil der Druckänderung ist also grob ein Rechtecksignal, enthält aber auch höherfrequente Anteile, die durch die zum Prüfstand gehörige, pneumatische Druckregelung entstehen. Das Drucksignal selbst muss also annähernd eine Sägezahnform haben. Mein Problem: trotz Offsetkorrektur driftet mein integriertes Signal, es gibt also niederfrequente Komponenten, denen ich so nicht beikomme. Ein Hochpass, den ich als Abhilfe implementiert habe, entfernt zwar die Drift, er nimmt allerdings auch die Rechteckform heraus. An dieser Stelle komme ich nicht weiter, da mir die Erfahrung fehlt: Das Problem wird ja nicht neu sein, also wie löst man so etwas normalerweise? Es wäre toll, wenn mich jemand in die richtige Richtung schubsen könnte, wenn es sein muss geht auch ein kräftiger Tritt ;) Viele Grüße und noch einen schönen Abend Karsten
Ich kenne Druckaufnehmer eher mit DMS oder Tauchspule, mit Piezo lassen sich eher höherfrequente Messungen machen. Ich vermute, Piezos werden auch nicht ausreichend linear sein, um daraus einen guten Wert abzuleiten.
Guten Morgen, ja, das mag, aber wie steht es allgemein mit der Signalverarbeitungsfrage? Wenn ich mit einem DMS ein langsames Rechtecksignal mit einer Drift erhalte, bin ich ja keinen Schritt weiter und sowas müsste man doch irgendwie in den Griff kriegen können?
Karsten D. schrieb: > Wenn ich mit einem DMS ein langsames Rechtecksignal mit einer Drift > erhalte, bin ich ja keinen Schritt weiter Wenn dem so wäre, hättest du recht. Abe wenn dem nicht so ist? Es gibt einen grundsätzlichen Unterschied zwischen piezoelektrischen Kraftsensoren und piezoresistiven Kraftsensoren (DMS). Piezoresistive DMS lassen sich grundsätzlich auch für DC-Messungen einsetzen: wenn dauerhaft die selbe Kraft ausgeübt wird, dann liefern Sie auch dauerhaft das selbe Signal. Zumindest im Grundsatz, um Drifts und Einflüsse wechselnder Temperatur muss man sich immern och Gedanken machen. Piezoelektrische Kraftsensoren lassen sich grundsätzlich nicht für DC-Messungen einsezten. Sie haben immer eine untere Grenzfrequenz. Was langsamer als diese ist (also z.B. der DC-Anteil des Signals) lässt sich damit nicht bestimmen. Bei vielen ICP-Sensoren musst du selbst den DC-Anteil des Signals abkoppeln, damit eine sinnvolle Messung möglich wird. Wenn du das Ausgangssignal aufintegrierst, spielt natürlich genau der DC-Anteil die größte Rolle, weil genau der bei der Integration zu einem ständigen Anstieg des Signals führt. Von daher solltest du dich schon zuerst fragen, ob dein Ansatz überhaupt sinnvoll ist. Und es könnte dabei rauskommen, dass er für einen DMS-basierten Kraftsensor sinnvoll wäre, für einen piezoelektrischen Kraftsensor aber nicht sinnvoll ist. Ein guter Einstieg wäre einfach mal zu sagen, welchen konkreten Kraftsensor du denn verwendest. Ist er überhaupt wirklich piezoelektrisch oder stand deine Kurzbezeichnung "Piezo" vielleicht unbewusst für piezoresistiv (also einen DMS)?
Angehängte Dateien:
-

Integratorproblem.png
49 KB
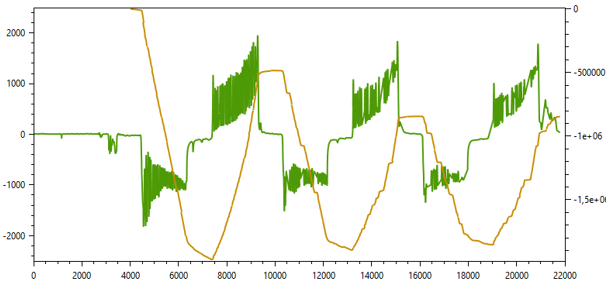
Guten Morgen, vielen Dank für deine Ausführungen. Grundsätzlich bin ich mir absolut sicher, dass es wirklich ein Piezo ist, weil ich diesen selbst eingebaut habe. Dass es da Probleme mit statischen Messungen gibt, ist mir grundsätzlich bewusst, nach dem Prüfstand kommt aber die reale Anwendung (über die ich leider nicht offen reden kann) und die ist dynamischer. Ich wollte jetzt wirklich niemanden wegen der üblichen Fallstricke hier im Forum (XY-Problem, Salamitaktik, geheime Anwendung, usw.) verärgern und habe mir bei meinem Eröffnungsbeitrag wirklich Mühe gegeben. Die Aufbaubeschreibung war nur zur Erläuterung gedacht, evtl. hätte ich besser fragen sollen: "Wie baut man einen funktionierenden digitalen Integrator, der ein driftbehaftetes Rechtecksignal integrieren kann?" Antworten bitte möglichst auf diese Frage. Anbei noch ein Bild. Das Signal ist grün, das integrierte Signal gelb. Man beachte die Skalierung des integrierten Signals (rechte y-Achse). Viele Grüße Karsten
Karsten D. schrieb: > Grundsätzlich bin ich mir absolut > sicher, dass es wirklich ein Piezo ist, weil ich diesen selbst eingebaut > habe. Ist "ein wirklicher Piezo" jetzt Piezoresisitv oder Piezoelektrisch? Beide beginnen mit "Piezo", beides sind aber ganz unterschiedliche Sensoren. Speziell im Hinblick auf die Behandlung des Gleichsignals. Karsten D. schrieb: > "Wie baut man einen funktionierenden digitalen Integrator, der ein > driftbehaftetes Rechtecksignal integrieren kann?" > Antworten bitte möglichst auf diese Frage. Na, wenn du nicht mir mehr Info rausrücken willst, dann halt auch nur die entsprechend unspezifische Antwort: wenn dein Signal einen undefinierten Gleichanteil hat, dann wird ein echter Integrator auf lange Frist immer undefiniert davonlaufen. Wenn du das nicht willst, musst du den Gleichanteil entfernen. Du musst dich also entscheiden, welche Frequenzanteile du aufintegrieren willst, und welche du unterdrücken willst. Den Gleichanteil entfernen kannst du direkt im Eingangssignal, z.B. indem du den Mittelwert über das Eingangssignal bildest und den jeweils vom Eingangssignal abziehst. Einfacher geht es ggf., indem du den Ausgang des Integrators selbst nochmal aufintegrierst und dieses Signal auf den Eingang gegekoppelst. Durch die Festlegung der Mittelungszeit bzw. der unterschiedlichen Integrationszeitkonstanten legst du fest, welche Frequenzanteile du integrieren willst, und welche untedrücken.
Karsten D. schrieb: > nach dem Prüfstand kommt aber die reale Anwendung (über die ich > leider nicht offen reden kann) Kein Problem: 200,- € Netto, und Du bekommst eine Lösung von mir.
?? Das Verhältnis von Eingangssignal und ausgangssignal ist für einen piezoelektrischen Sensor ziemlich das, was ich erwarte. Der Eensor lagert im "verbogenen" Zustand irgendwo ein paar elektronen ein, der Ausgang des Integrators wird daher nicht den absoluten Druck wiedergeben. Mit einem piezoelektischen Sensor läßt sich nur dynamik abbilden, nicht statik.
Experte schrieb: > Karsten D. schrieb: >> nach dem Prüfstand kommt aber die reale Anwendung (über die ich >> leider nicht offen reden kann) > > Kein Problem: 200,- € Netto, und Du bekommst eine Lösung von mir. Ich biete die Lösung für 150,- an inklusive MWST, aber nicht ausgewiesen, da Kleinunternehmerregelung.
Da gibt es aus keine praktikable/wirtschaftliche Lösung. Wenn der Druck gemessen werden soll, setze einen Drucksensor ein. Vergleichbar mit Mems-Gyroskopen,, aus denen man einen künstlichen Horizont bauen will, das scheitert aus den gleichen Gründen.
Der zweite Post sieht doch brauchbar aus. Mit dem Bild kann man etwas anfangen. Ich sehe zwei Möglichkeiten: a) Der hochfrequente Teil ist Rauschen. Das Rauschen ist in der gleichen Größenordnung wie das Nutzsignal. Dann hast Du eh nur begrenzte Genauigkeit und es wird nicht besser, solange das Rauschen nicht unterdrückt wird. b) Es ist gar kein Rauschen, sondern das hochfrequente ist Nutzsignal. Dann wird hier massiv unterabgetastet und es wird nicht besser, solange nicht die Abtastfrequenz erhöht wird. Um zu wissen, welcher Fall zutrifft, müsste man das System besser kennen.
Karsten D. schrieb: > trotz Offsetkorrektur driftet mein integriertes Signal, Wie betreibst du denn die Offsetkorrektur? Sie scheint offensichtich nicht zu funktionieren. Und wie arbeitet der Integrator? Ich nehme an, nicht bandbegrenzt, sondern er nimmt alles was er bekommt, oder?
Angehängte Dateien:
-

Integrator_Bild.png
89 KB
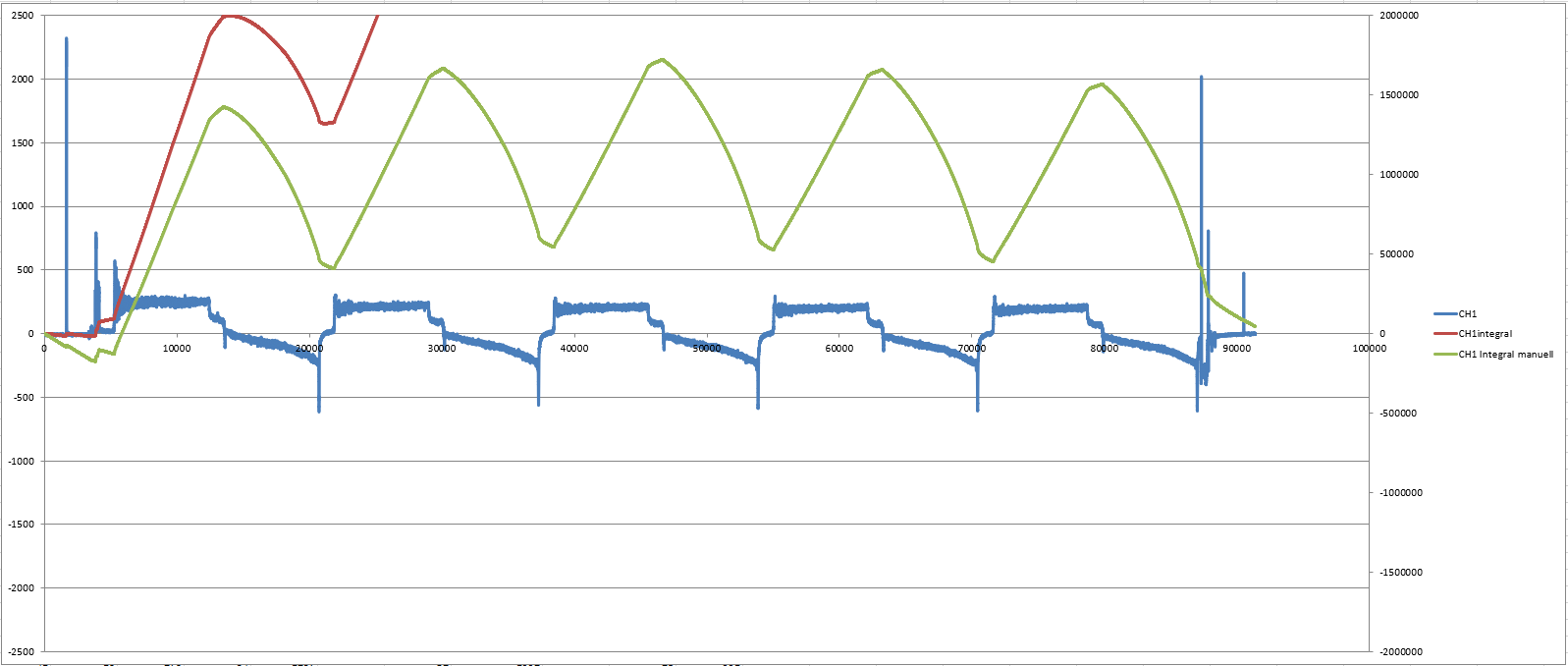
Guten Morgen, ihr habt ja recht... In der Zwischenzeit haben sich ein paar neue Erkenntnisse ergeben: Wie Xilinx-user sagt, scheint etwas mit der Offsetkorrektur nicht zu stimmen. Diese erfolgt zweistufig: Das Eingangssignal wird in der Hardware auf 0V justiert, die letzte Drift wird in der Software (vor dem Integrator) herausgerechnet. Dazu wird der Mittelwert aus einigen tausend Werten berechnet, gespeichert und ab dann immer abgezogen. Meine Schaltung verfügt aktuell über zwei Messkanäle, von denen es mir bei einem der Kanäle offensichtlich besser gelungen ist, die Hardware abzugleichen. Dieser Kanal driftet auch weniger. Ich werde das weiter untersuchen: die nächste Hardwaregeneration bekommt Spindeltrimmer zum besseren Abgleich, außerdem werde ich es mal mit einer AC-Kopplung versuchen. Ihr seid recht überzeugend, dass ich hier Mist versuche. Zusätzlich habe ich meine Rohdaten mal untersucht, und den Offset nachträglich einstellbar gemacht. das Integral habe ich dann nachträglich manuell berechnet. Damit kann ich das Ende der Kurve wieder nach unten drücken, es bleibt nur eine "Beule" zurück, also vermutlich ein niederfrequenten Störsignal. Außerdem drückt sich der Anfang des Signals (wo eigentlich kein Eingangssignal ist, also für ein paar Sekunden 0V) ins Negative. Ich habe das Bild dazu und auch die Exceltabelle mal angehängt, nur für den Fall, das es jemanden interessiert. Blau = Eingangssignal, rot = vom System integriertes Signal, grün = Signal mit manuell angepasstem Signaloffset, bis die Null wieder etwa erreicht wurde. Viele Grüße Karsten PS: Die xlsx ist recht groß, da über 90k-Werte. Ich hoffe, das ist erlaubt.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.