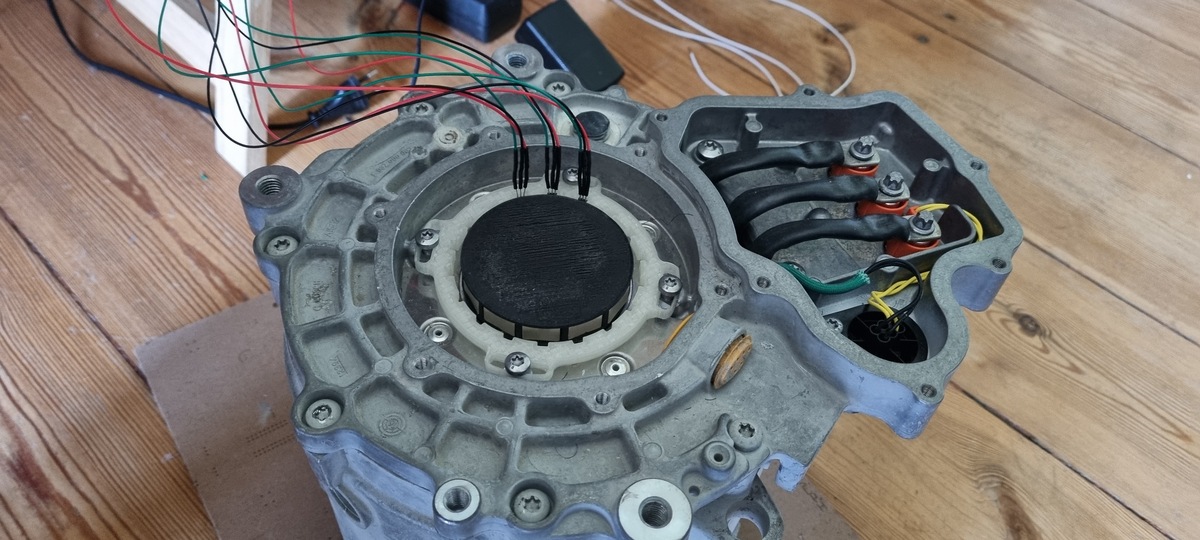

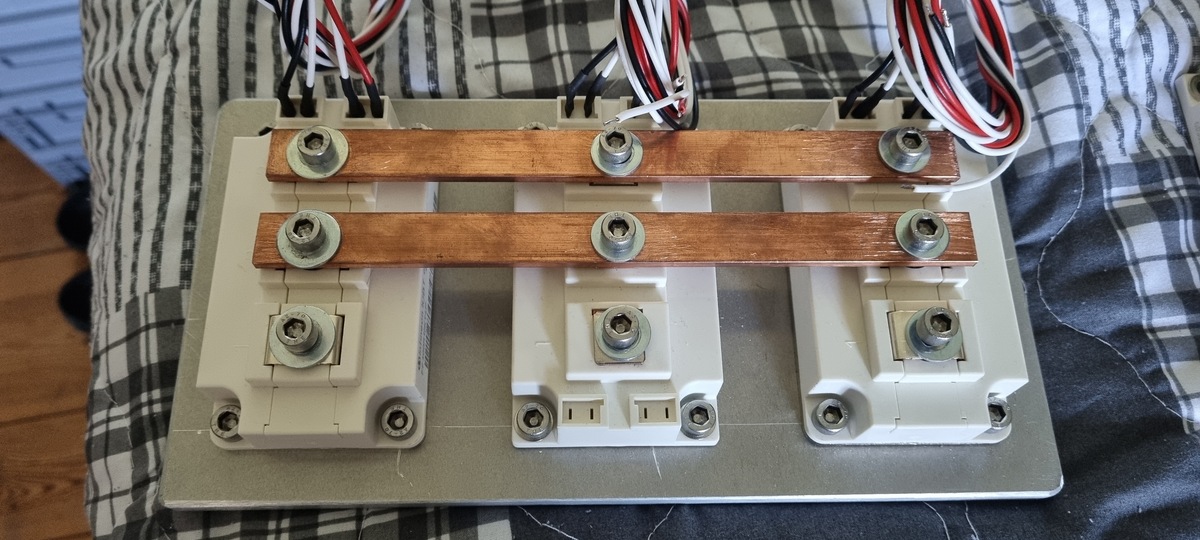
Hallo liebe Community, ich bin jetzt nun schon lange stiller Mitleser, habe aber nun ein Problem, das ich hier noch nicht gefunden habe. Zurzeit bin ich dabei zwei Motoren aus defekten Streetscootern als Antrieb für ein Hausboot umzubauen. Leider muss ich dazu eine neue Motorsteuerung konstruieren und komme momentan nicht so recht weiter. Nach meinem aktuellen Kenntnisstand habe ich hier einen BLDC-Motor von Bosch. Diesen habe ich mit Hallsensoren ausgerüstet, die mir den aktuellen Stand des Rotors anzeigen, was auch gut funktioniert. Allerdings schaffe ich es nicht den Motor zum Drehen zu bewegen, bevor mir die IGBTs abrauchen. Die Batteriespannung des Autos liegt bei 300V, der Motor hat 3 Phasen, die meines Erachtens im Stern angeschlossen sind und das Auto hatte eine angegebene Nennleistung von 37kW. Mein Plan ist derzeit folgender, ich benutze einen BLDC Driver Chip wie den UCC2626 um die Hallgeber auszulesen und die IGBTs zu regeln. Dann konvertiere ich die 5V Signale für HIGH- und LOWside über Optokoppler zu 12V Signalen und befeuere damit die IR2110 IGBT-Driver, welche dann die IGBTs ansteuern. Da ich nun schon zwei große 300A IGBTmodule gegrillt habe bin ich von der Autobatterie auf ein Labornetzteil mit 60V – 6A gewechselt. Leider bringe ich den Motor nur zum Zucken bis die IGBTs wieder ihren magischen rauch aussondern. Hat von euch jemand eine Idee, ob ich auf dem richtigen weg bin oder ob ich besser einen anderen Ansatz in Betracht ziehen sollte? Ich bin euch für jede Hilfe sehr dankbar.
Angehängte Dateien:
-

20210607_134552.jpg
210 KB -

20210607_134606.jpg
220 KB -

20210519_164840_1.jpg
240 KB -

20210607_134625.jpg
210 KB
Die Optokoppler sind zu langsam. Das heißt, die fallende Flanke ist noch gar nicht ganz aus, da wird der andere IGBT schon gezündet. Es kommt zu Überschneidungen. Auch ohne Optokoppler sollte da eine gewisse Totzeit vorgesehen werden. Der IR2110 sollte sowas eigentlich integriert haben.
Das timing würde ich mit einem mehrkanaligen Oszilloskop analysieren. Um beim messen nicht gleich den nächsten Satz zu killen, würde ich einen Vorwiderstand in Reihe zur Batterie schalten. Mit großen Widerstand beginnen, z.B. 2 Stück gleiche 15W-Glühbirnen in Reihe. Lassen sich die originalen Motorregler nicht verwenden?
müssen die Halbleiter nicht auf Kühlkörpern montiert werden?
Frank schrieb: > Die Optokoppler sind zu langsam Das ist ein guter Ansatz, jedoch kann ich die Totzeiten des Chips nicht verändern und der IR2110 sollte ja einen integrierten Kurzschlussschutz haben. Helge schrieb: > Das Timing würde ich mit einem mehrkanaligen Oszilloskop analysieren Ich habe schon versucht die Hallgeber mit einem mehrkanaligen Oszilloskop auszurichten, indem ich über Wiederstände einen virtuellen Sternpunkt geschaffen habe und beim händischen drehen des Motors dann die Phasen und die Logikwerte der Sensoren abgefragt habe, bis diese wie in der Beschreibung des UCC2626 übereinander lagen. Ich würde das gerne bei laufendem Betrieb versuchen, jedoch halten meine IGBTs in der Regel nicht lange genug um eine Messung zu machen. ● Des I. schrieb: > müssen die Halbleiter nicht auf Kühlkörpern montiert werden? Ja, eigentlich schon, jedoch sind die kleinen IGBTs für Ströme bis 80A und die großen für Ströme bis 300A ausgelegt und ich gebe denen max. 6A. die Hitzeentwicklung sollte sich daher in Grenzen halten.
Marvin T. schrieb: > und ich gebe denen max. 6A. 6A mal 60V sind auch 360W. Zu viel für ein bischen Blech Kein Schaltplan, viel Spekulation Einen 36kW Motor mit 60V 6A zum arbeiten bringen zu wollen ist schon ziemlich mutig. Beim Anlauf wirkt der Motor für die schwache Stromversorgung und die Brücke wie ein Kurzschluss. Wie sich diese permanenten Kurzschlüsse auf deine Ansteuerung auswirkt weisst maximal du.
Marvin T. schrieb: > Zurzeit bin ich dabei zwei Motoren aus defekten Streetscootern als > Antrieb für ein Hausboot umzubauen. Was mir dabei auffällt. Hausboot heisst ja doch ziemlich großer und eher Strömungsungünstiger Klotz. Ein E-KFZ mit 37kW hat gemittelt eine maximal halb so große durchschnittlich abgerufene Leistung. Bei einem Boot braucht man quasi konstant Nennleistung, da Wasser halt doch deutlich dichter ist als Luft. 1. können das deine Motoren ab? 2. Welche Akkukapazität hast du denn eingeplant um damit auch mal den Tag über von A nach B shippern zu können? 3. Wie wird das dann über Nacht wieder aufgeladen?
Fragen wir doch erstmal anders herum: wieviel UPM soll denn der Motor machen und wieviel ist für die Schraube angedacht?
Ooohjee Ohweh Ohjemine... 37 KW sind schion eine Hausnummer wo es auf ein saberes Design von der Endstufe und dessen treiber fordert. Und euch einen gescheiten controller der dafür geeignet ist mit verstellbaere Totzeit wie STM32F303 oder einer der MSP430 DSPs wo dann auch genug Bums hatt um eine FOC Reglung ordentlich laufen zu lassen. Das schon eine wesentlich größere Herrausfordrung als ein Makerprojekt.
Udo S. schrieb: > Bei einem Boot braucht man quasi konstant Nennleistung, da Wasser halt > doch deutlich dichter ist als Luft. Na ja, 2 mal 37kW soltten auch für einen groben Klotz für deutlich mehr als nur Schrittgeschwindigkeit ausreichen. Und so schnell brauchts da ja nicht zu werden, sonst wärs kein Hausboot. Da kommen dann halt ein paar hundert alte LKW-Batterien an stelle des Betongewichts in den Keller. ("Herr Kaleun – melde gehorsamst: Dieselmaschine – klar, Kompass und Echolot – klar, beschädigte Zellen - repariert ...) Oliver
Oliver S. schrieb: > ein paar hundert alte LKW-Batterien klar :-) 1. keine Traktionsbatterien -> schnall kaputt 2. Kosten die auch schon über 1000 Euro 3. Sind sie schon hin wenn man sie bekommt, falls man sie bekommt. Die Zeiten wo man sich sowas beim Schrotthändler abholen konnte sind schon seit über 20 Jahren vorbei.
Warum braucht das Hausboot denn 2x37kW Leistung? Ich bin schon ein führerscheinfreies Hausboot mit 15PS (=~11kW) gefahren, klar das ist keine Rakete aber es reicht. 20..25 kW würde ich noch verstehen, aber wozu denn fast 80kW? Die Energie muss ja auch irgendwo gespeichert werden...
Udo S. schrieb: > Wie sich diese permanenten Kurzschlüsse auf deine Ansteuerung auswirkt > weisst maximal du. Ja das stimmt, womit ich mich momentan in einem kleinen Teufelskreis befinde. Messen geht ohne Strom nicht, Strom geht nicht ohne dass der Motor sich dreht und Motor dreht sich nicht, biss ich messen kann. :-/ Und aus dem Kreis will ich irgendwie ausbrechen. :-) Wenn ich jedoch mit meinem wissen nicht falsch liege ist ja die Leistung die über dein IGBT abgeführt wird nur die, die konstant zum Spannungsabfall im Modul ist und der sollte ja eigentlich recht niedrig sein. Selbst wenn wir von einem Volt Spannungsabfall ausgehen, was ich denke schon recht viel ist, komme ich da auf max. 6W und das sollten die schaffen wenn ich die nur wenige Sekunden bis Minuten. Verbessert mich bitte wenn ich damit falsch liege. Udo S. schrieb: > 1. können das deine Motoren ab? Die Schiffsschraube ist noch nicht gekauft und wird erst berechnet wenn wir den Motor am laufen haben und wird dann auf die Leistung des Motors ausgelegt. > 2. Welche Akkukapazität hast du denn eingeplant um damit auch mal den Wir würden auch die Akkus aus dem Auto weiterhin verwenden wollen, also mit gleichbleiben der Kapazität. jedoch handelt es sich immer noch um ein Hausboot und keinen Vergnügungsdampfer. Also sind lange Fahrten erstmal nicht vorgesehen. > 3. Wie wird das dann über Nacht wieder aufgeladen? Das Boot bekommt große Solarflächen aufs Dach und kann zusätzlich nachts am Steg über 230V geladen werden. Des I. schrieb: > Fragen wir doch erstmal anders herum: > wieviel UPM soll denn der Motor machen > und wieviel ist für die Schraube angedacht? Wir haben mal anhand der Geschwindigkeit des Autos ausgerechnet, dass dem Motor wohl ca. 5.000 U/min gemacht hat und über ein 8/1 Getriebe dann 625 U/min am Rad ankamen. für eine Standard Schiffsschraube wären jedoch rund 1.500 U/min gut. Entweder wird also die Schraube eine Spezialanfertigung, der Motor langsamer oder ein 4/1 Getriebe dazwischen gebaut. Dass alles entscheidet sich jedoch erst, wenn der Motor läuft. Helge schrieb: > Lassen sich die originalen Motorregler nicht verwenden? Nein, leider nicht. Moderne Autos haben es leider an der naht so viel wie möglich digital zu machen. Da leider bis auf zwei CANbus Leitungen und 12V Steuerungsseitig nichts an den Controller geht und wir nicht einmal die Zündung des Autos ans laufen bekommen, so dass wir das Gaspedal hacken könnten fällt die Option leider aus. Sonst hätte ich das auch so gemacht.
Hi Marvin,
cooles Projekt, aber folgendes solltest du noch bei der E-Maschine
berücksichtigen.
1. Das ist eine PSM mit verteilten Wicklungen. Ein Betrieb mit
Hallsensoren und Blockkommutierung ist suboptimal und sorgt hier
besonders im niedrigen Drehzahlbereich bei hohen Momenten für erhöhte
Verluste im Rotor. Dadurch sinkt deine Dauerleistung deutlich. Auch wird
es nicht gerade einfach, den Stromregler stabil zu halten bei
Blockkommutierung und niedrigen Drehzahlen.
Besser wäre es, einen Resolver + SVPWM mit 10kHz Schaltfrequenz
einzusetzen.
2. Wahrscheinlich musst du auch Feldschwächung nutzen, da diese
Traktionsantriebe meist sehr früh (ca.4000-5000rpm bei uDC_Nenn) an die
Spannungsgrenze gelangen.
Das hängt aber von deinem geplanten Getriebe ab. Vielleicht kannst du
durch eine Leerlaufmessung die Spannungsgrenze ermitteln und dein
Getriebe darauf abstimmen.
3. Der Motor hat einen eingebauten NTC für die Wicklungstemperatur.
Diesen bitte unbedingt auslesen und die Wicklungstemperatur auf max.
200°C bis 210°C begrenzen.
4. Im Grunde gehört der Rotor thermisch ebenfalls überwacht oder die
Dauerleistung begrenzt, da sonst die Magnete entmagnetisieren. Wenn du
aber das Modulationsverfahren mit einer ausreichenden Schaltfrequenz
>=10kHz betreibst und die Dauerleistung nicht voll ausnutzt, sollte es
hier keine Probleme geben.
5. Für die Kühlung des Motors empfehle ich dir 20°C bis 40°C und 8 bis
10 l/min. Unbedingt ein Wasser-Glykol gemisch nehmen, da sonst Korrosion
auftritt.
Viel Erfolg beim Umbau.
PS: Deutlich einfacher und viel besser geeignet wäre hier ein
Industriemotor und kein Traktionsantrieb.
Die Traktionsantriebe in Fahrzeugen sind nicht wirklich für
Marineanwendungen geeignet, da im Fahrzeug ganz andere Leistungszyklen
gefahren werden und sie darauf ausgelegt wurden.
Binanzferater schrieb: > Warum braucht das Hausboot denn 2x37kW Leistung? Dass ist nunmal dass was da ist. :-D ich denke auch nicht, dass iwr die voll ausreizten werden. Wenn ich es richtig verstanden habe, haben boote eine sogenannte Rumpfgeschwindigkeit, die eh nicht zu überschreiten ist, egal wieviel ich hinten an Bums rein gebe.
Marvin T. schrieb: > Das Boot bekommt große Solarflächen aufs Dach Das ist eher eine homöopathisch Dosis... > und kann zusätzlich nachts am Steg über 230V geladen werden. 16h laden an 3,68kW ergibt (ohne Ladeverluste und ohne Verluste im Antrieb) ca. 59kWh, d.h. dein Antrieb könnte nichtmal eine Stunde auf Vollast laufen. Ganz davon abgesehen, dass eine Bleibatterie mit 60 kWh mal locker 1,5 Tonnen wiegt.
@Marvin Danke für die Antworten, das klingt sinnvoll. Ich dachte nur mit dem Hausboot sollte ggf. größere Touren gemacht werden. So wie man das z.B. bei einer Tour auf dem Canal du Midi macht. Marvin T. schrieb: > Ja das stimmt, womit ich mich momentan in einem kleinen Teufelskreis > befinde. Messen geht ohne Strom nicht, Strom geht nicht ohne dass der > Motor sich dreht und Motor dreht sich nicht, biss ich messen kann. :-/ > Und aus dem Kreis will ich irgendwie ausbrechen. :-) Da würde ich auf jeden Fall mal die Versorgung der Steuerung und der Treiber von denen der Endstufe trennen. Und dann schrittweise vorgehen. Bevor da die dicken IGBTs drankommen musst du sicherstellen, dass die Signale stimmen. Ohne 4-Kanal Oszi wird das nix. Wie schon von anderen geschrieben ist das in der Leistungsklasse kein Anfängerprojekt mehr. Du weisst im Moment ja wohl nicht mal warum die Module abgeraucht sind, zu vermuten wäre eben kurzzeitige Kurzschlüsse durch überlappendes Timing. Trotzdem viel Erfolg
Da wird man sich schnell nach einem Benzintank sehnen. E-Boote sind noch schlimmer als E-Autos. Alles was über ein SUP rausgeht, sollte nicht elektrisch betrieben werden. Wer will denn mit einem Hausboot ständig am Strom hängen und in den zwei Stunden dazwischen Angst um seine Batterieladung haben? Dazu kommt ja noch dass ein Hausboot, wie ein Wohnmobil, auch gerne noch andere Verbraucher hat. Und da ist man froh über eine Maschine die einfach die benötigte Energie während der Fahrt liefert.
Cyblord -. schrieb: > Da wird man sich schnell nach einem Benzintank sehnen. Mit Sicherheit nicht! Ich habe mit einigen Leuten gesprochen die ein Boot haben und die sind ausnahmslos der Meinung, dass ein E-Boot die bessere Wahl ist. Wichtig ist nur, dass die Rumpfgeschwindigkeit nicht überschritten wird, die liegt je nach Bauart zwischen 10 und 25 km/h. Sonst steigt der Energieverbrauch unverhältnismäßig stark an.
Hey Patrick, du scheinst dich mit den Motoren echt auszukennen. Vielen dank für deinen Input. Wie bestimmt schon alle mitbekommen haben bin ich darin echt kein Experte. Zu Anfang haben wir versuch den Controller aus dem Auto zu benutzen, da ich es für möglich gehalten habe auch als "Bastler" die mechanischen Funktionen wie Zündschloss, Betriebswahlhebel und Gaspedal so zu hacken, dass diese mit einem Arduino angesteuert werden können. Nachdem ich jedoch festgestellt habe, dass das Auto auch so keinen Ton von sich gibt, habe ich im Internet nach möglichen Eigenbaulösungen für die Ansteuerung eines Elektromotors gesucht und bin nach einiger zeit auf den Post von Matthias gestoßen. https://www.mikrocontroller.net/articles/3-Phasen_Frequenzumrichter_mit_AVR Dieses Projekt mit größeren IGBTs nachzubauen hielt ich für mich noch machbar. Nachdem sich jedoch herausgestellt hatte, dass der Moter dafür nicht geeignet ist Suche ich nun nach Möglichkeiten in meinem Machbarkeitsbereich um diesen Motor anzusteuern. Glaubst du oder sonst jemand hier dass es mit einem Standard BLDC Driver IC wie dem UCC2626 machbar ist, auch wenn der Motor so nicht optimal läuft? Oder wird es ohne einen Resolver + SVPWM mit größer gleich 10kHz auf Basis beispielsweise eines STM32 nicht möglich sein? Denn ein solches Projekt würde meine Fähigkeiten einfach übersteigen. Alternativ habe ich darüber nachgedacht, die Batterien auf eine Spannung von <=100V umzuklemmen und einen fertigen Controller aus China zu bestellen, so wie diesen hier: https://de.aliexpress.com/item/1005001992946746.html?spm=a2g0o.detail.1000060.1.189a7717lxS0Tr&gps-id=pcDetailBottomMoreThisSeller&scm=1007.13339.169870.0&scm_id=1007.13339.169870.0&scm-url=1007.13339.169870.0&pvid=f67e356e-3577-4280-8f29-25567a22b534&_t=gps-id:pcDetailBottomMoreThisSeller,scm-url:1007.13339.169870.0,pvid:f67e356e-3577-4280-8f29-25567a22b534,tpp_buckets:668%230%23131923%230_668%230%23131923%230_668%23888%233325%238_668%23888%233325%238_668%232846%238112%231997_668%235811%2327190%2392_668%232717%237558%23189_668%231000022185%231000066058%230_668%233468%2315607%2382_668%232846%238112%231997_668%235811%2327190%2392_668%232717%237558%23189_668%233164%239976%23654_668%233468%2315607%2382 Der Motor hat dann zwar durch die Spannungsänderung weniger Leistung, sollte jedoch für den Zweck immer noch reichen und der Controller sollte für diese Art von Motoren gemacht sein.
Ich würde den Motor an einem FU oder Servoumricher betreiben. Alles andere wird bei der Leistung scheitern und ist auch viel zu gefährlich. Schon den FU zu parametrieren wird nicht ganz einfach, aber das ist immerhin einigermaßen machbar. Als Bonus hat man im einfachsten Fall einen 0-10V-Eingang den man als Gaspedal nutzen kann. Dazu kann man einen Servoumrichter/FU mit DC-Zwischenkreiseingang nutzen, da kann die Batterie dran (über eien passende Sicherung natürlich).
Name: schrieb: > Dazu kann man einen Servoumrichter/FU mit DC-Zwischenkreiseingang > nutzen, da kann die Batterie dran (über eien passende Sicherung > natürlich). Ja die idee hatte ich auch schon, es ist jedoch leider kein Drehstromasynchronmotor, sondern scheinbar ein Permanent Magnet Synchron Motor und da funktioniert das leider nicht. Außerdem sind FUs in dem Leistungsbereich fast unerschwinglich.
Marvin T. schrieb: > Ja die idee hatte ich auch schon, es ist jedoch leider kein > Drehstromasynchronmotor, sondern scheinbar ein Permanent Magnet Synchron > Motor und da funktioniert das leider nicht. Außerdem sind FUs in dem > Leistungsbereich fast unerschwinglich. Ich vermute schon, dass es auch FUs gibt die Synchronmotore steuern können. Bei Servoumrichtern bin ich mir aber zu 100% sicher. Beispiel: https://www.br-automation.com/de/produkte/antriebstechnik/acopos/servoverstaerker/8v164000-2/ Mit dem durfte ich schon PESMs steuern. Dazu ist ein Geber nötig, aber den kann das Gerät (mit passender Steckkarte) auch auswerten. Nur ist das natürlich monströser Overkill: Für einen simplen Bootosantrieb ist das viel zu teuer, und kann viel zu viel. Man muss sich jetzt eben auf die Suche nach einem passenden Gerät machen. Leider kenne ich mich im Bereich Fahrzeugantriebe und Boote gar nicht aus, daher bin ich mal wieder keine große Hilfe. Aben Sind wir mal realistisch: Eine Eigenentwicklung in dem Leistungsbereich ist für Hobbyisten nicht machbar, oder nur mit einiger Erfahrung. Ich durfte schon FUs bauen (Bereich 600W), und würde mir das nicht zumuten. Es ist sicherlich erheblich einfacher, einen passenden Umrichter aufzutreiben, als einen zu entwicklen. Keine Sorge, eine Herausforderung wird das Projekt trotzdem, denn man muss so ein Teil auch passend parametrieren. Bei der Ermittlung der nötigen Parameter würde ich zum Beispiel voll auflaufen ;-)
Hi, erstmal müssen da Blockkondensatoren direkt an die Module an die Plusminusschienen. Auch die Zuleitungen von den Treibern kurz halten. Dann schaust Du erstmal ohne Motor ob die Module korrekt arbeiten. Machst z.B. über eine 1A Strombegrenzung mal 10Hz PWM fest drauf. Wenn dann kein Zwischenkreisstrom fließt, kannst Du den Motor anklemmen und von hand andrehen bis er auf der entsprechenden Drehzahl rastet. Wenn Du das hast, kannst Du mit den Hall-Elementen spielen bis Du den Selbstanlauf hinbekommst. Ich denke im Dauerbetrieb kannst Du sicher 1/10 der Leistung fahren. Dann ist auch die Betriebsspannung kleiner und Du kannst effizienter mit MOSFET Modulen arbeiten.
Marvin T. schrieb: > Hey Patrick, > > du scheinst dich mit den Motoren echt auszukennen. Damit verdiene ich mein Geld ;) > Zu Anfang haben wir versuch den Controller aus dem Auto zu benutzen, > da ich es für möglich gehalten habe auch als "Bastler" die mechanischen > Funktionen wie Zündschloss, Betriebswahlhebel und Gaspedal so zu hacken, > dass diese mit einem Arduino angesteuert werden können. Ich würde an deiner Stelle hier nochmal ansetzen und versuchen den Umrichter via CAN anzusteuern. Wird aber verdammt schwierig, für einen Laien wahrscheinlich unmöglich. Der Vorteil hier ist, dass der Fahrzeugumrichter die komplette Überwachung und Regelung der Maschine beinhaltet. > > Dieses Projekt mit größeren IGBTs nachzubauen hielt ich für mich noch > machbar. Nachdem sich jedoch herausgestellt hatte, dass der Moter dafür > nicht geeignet ist Suche ich nun nach Möglichkeiten in meinem > Machbarkeitsbereich um diesen Motor anzusteuern. > > Glaubst du oder sonst jemand hier dass es mit einem Standard BLDC Driver > IC wie dem UCC2626 machbar ist, auch wenn der Motor so nicht optimal > läuft? Wenn du die Leistung deutlich reduzierst auf vielleicht 20kW, sollte der Motor die suboptimale Ansteuerung und Regelung abkönnen. Das Problem hierbei ist, dass dein Motor eine Sinusförmige induzierte Spannung hat und du mit dem BLDC Treiber eine "Treppenförmige" Spannung an den Motor anlegst. Dadurch steigen die Verluste im Rotor massiv an, was diesen aufheizt. Bei diesen Motoren ist der Rotor hinsichtlich Dauerleistung meist kritisch. Wenn du nun die Dauerleistung von 37kW auf z.B. 20kW bei gleicher Batteriespannung reduzierst und dabei auch noch deutlich unterhalb der maximalen Drehzahl bleibst, dann sinken auch die Verluste des Rotors deutlich. > Alternativ habe ich darüber nachgedacht, die Batterien auf eine Spannung > von <=100V umzuklemmen und einen fertigen Controller aus China zu nehmen. > Der Motor hat dann zwar durch die Spannungsänderung weniger Leistung, > sollte jedoch für den Zweck immer noch reichen und der Controller sollte > für diese Art von Motoren gemacht sein. Die Spannung auf 100V zu reduzieren würde ich auf gar keinen Fall machen, da der Motor damit schon bei sehr kleinen Drehzahlen in die Spannungsgrenze kommt und du in die Feldschwächung gehen musst, falls du trotzdem die vorherige Nenndrehzahl benötigst. Von der sehr kleinen Leistung die dann noch übrig bleibt reden wir besser nicht. Bedenke auch dass dann 100V deine max. Spannung bei voller Batterie ist. Während des Betriebs sinkt diese dann mit sinkendem Ladezustand immer weiter und deine Leistung wird immer geringer. Du kannst ja nicht einfach zur Kompensation mehr Strom stellen, da der Motor das nicht mitmacht... Noch ein paar Fragen zum Umrichter: Wie hast du dir dann eigentlich die Kühlung der Leistungselektronik vorgestellt? Hast du auch ein Fehlerhandling? Was passiert z.B. beim reset eines Controllers während des Betriebes. Im Auto ist der sichere Zustand meistens der aktive Kurzschluss des Motors (alle schalter der Highside oder Lowside geschlossen). Bedenke auch hier, dass bei ungünstigen Rotorwinkeln (bei max. Flussverkettung) transiente Stromspitzen von einigen 1000A entstehen. Die muss dein Umrichter kurzzeitig abkönnen. Alternativ, wenn du keine Feldschwächung nutzt, kannst du auch den Freilauf als sicheren Zustand nutzen. Da entstehen dann aber Spannungsspitzen im Zwischenkreis, die dein Zwischenkreiskondensator abfangen muss, da die Batterie nur einen gewissen Spannungsrippel mag. Wie du siehst, ist es nicht ganz so einfach diesen Motor sicher zum laufen zu bringen ;).
Das blöde an dem treiber ist ja, dass er die Highside Spannungsversorgung aus der Betriebsspannung gewinnt. Du wirst aber bei kleinen Drehzahlen durchaus mit ein paar Volt im Zwischenkreis auskommen. Das geht mit dem Treiber nicht, ist aber mindestens im Experimentierstadium nötig.
Patrick H. schrieb: > Wie hast du dir dann eigentlich die Kühlung der Leistungselektronik > vorgestellt? Kühlwasser hat er ja genug. Aber die Verluste sind mit IGBT wegen des Spannungsabfalls daran hoch.
Sinus schrieb: > Das blöde an dem treiber ist ja, dass er die Highside > Spannungsversorgung aus der Betriebsspannung gewinnt. > > Du wirst aber bei kleinen Drehzahlen durchaus mit ein paar Volt > im Zwischenkreis auskommen. Das geht mit dem Treiber nicht, > ist aber mindestens im Experimentierstadium nötig. von welchem Treiber genau redest du grade?
Wobei, Du könntest da den Highside Teil auch mit isolierten DC-DC Convertern versorgen und die Diode weg lassen.
Sinus schrieb: > Wobei, Du könntest da den Highside Teil auch mit isolierten > DC-DC Convertern versorgen und die Diode weg lassen. Welche Erkenntnis sollte ich denn damit erlangen? Ich kann dir leider noch nicht ganz folgen.
Sorry, war Quatsch. Geht doch mit dem Treiber. Greift ja von seiner eigenen Versorgungsspannung ab.
Patrick H. schrieb: > Ich würde an deiner Stelle hier nochmal ansetzen und versuchen den > Umrichter via CAN anzusteuern. Wird aber verdammt schwierig, für einen > Laien wahrscheinlich unmöglich. > Der Vorteil hier ist, dass der Fahrzeugumrichter die komplette > Überwachung und Regelung der Maschine beinhaltet. Ja einfach wird es bestimmt nicht, aber glücklicherweise bin ich auch nicht ganz auf den Kopf gefallen und habe die kompletten CAN daten aus einem funktionierenden Streetscooter ausgelesen. :D Das Problem dabei ist, dass man ohne Liste an Befehlen aus knapp 10.000 Datenpunkten sehr viel Spielraum für Kreativität entwickeln kann und es recht unwahrscheinlich ist, die richtigen befehle zu extrahieren. Hinzu kommt, dass die Autos momentan nicht mal im zusammengebauten Modus an gehen. daher habe ich versucht das zu vermeiden. Patrick H. schrieb: > Wenn du die Leistung deutlich reduzierst auf vielleicht 20kW, sollte der > Motor die suboptimale Ansteuerung und Regelung abkönnen. grundsätzlich würden mir auch 10kW reichen, die Motoren sind wirklich Komplet überdimensioniert. Patrick H. schrieb: > Die Spannung auf 100V zu reduzieren würde ich auf gar keinen Fall > machen, da der Motor damit schon bei sehr kleinen Drehzahlen in die > Spannungsgrenze kommt und du in die Feldschwächung gehen musst, falls du > trotzdem die vorherige Nenndrehzahl benötigst. Von der sehr kleinen > Leistung die dann noch übrig bleibt reden wir besser nicht. Grundsätzlich würde mir ja eine Drehzahl von 1.500 U/min eh besser gefallen, da ich dann kein Getriebe vor dem Propeller benötige. Allerdings kann ich nicht einschätzen wie klein die Leistung dann ist. Patrick H. schrieb: > Bedenke auch > dass dann 100V deine max. Spannung bei voller Batterie ist. Während des > Betriebs sinkt diese dann mit sinkendem Ladezustand immer weiter und > deine Leistung wird immer geringer. Meines Wissens sind dass LIFEPO-Akkus, bei denen ist der Spannungsabfall bei der Entladung nicht so hoch. Patrick H. schrieb: > Noch ein paar Fragen zum Umrichter: > Wie hast du dir dann eigentlich die Kühlung der Leistungselektronik > vorgestellt? Da haben wir an eine Kühlung direkt über den Rumpf gedacht. Der ist komplett aus Aluminium und sollte die Temperatur direkt an das Wasser abgeben können. Patrick H. schrieb: > Hast du auch ein Fehlerhandling? > Was passiert z.B. beim reset eines Controllers während des Betriebes. Die IGBTs haben alle Freilaufdioden und an Kondensatoren habe ich gedacht. Da es sich um ein Hausboot handelt, dass langsam über die Spree schippern soll denke ich, dass der Freilauf als Fehlerhandling reicht. Patrick H. schrieb: > Alternativ, wenn du keine Feldschwächung > nutzt, kannst du auch den Freilauf als sicheren Zustand nutzen. Ich habe mich grade nochmal an Google gesetzt um herauszufinden, was die Feldschwächung genau bedeutet, jedoch ohne Erfolg beim Verständnis, vl. kannst du mir da nochmal auf die Sprünge helfen. Oder ist das wegen der Freilaufdioden eh hinfällig?
Ich würde das ganze erstmal wesentlich kompakter aufbauen. Die Leitungen kommen mir recht was zu lang vor und auch zu dünn. Vielleicht spielen da auch parasitäre Kapazitäten mit...
Marvin T. schrieb: > Dieses Projekt mit größeren IGBTs nachzubauen hielt ich für mich noch > machbar. Nachdem sich jedoch herausgestellt hatte, dass der Moter dafür > nicht geeignet ist Suche ich nun nach Möglichkeiten in meinem > Machbarkeitsbereich um diesen Motor anzusteuern. Ich meine schon. Deine Anwendung ist dafür geeignet, weil der Motor bei niedriger Drehzahl praktisch im Leerlauf startet. Dann fährst Du Spannung und Frequenz hoch. Besser ist sicher die Zwischenkreisspannung mit einem Buck-Converter zu regeln und den PWM-Modulationsgrad bei 100% zu lassen.
Binanzferater schrieb: > Warum braucht das Hausboot denn 2x37kW Leistung? > Ich bin schon ein führerscheinfreies Hausboot mit 15PS (=~11kW) > gefahren, klar das ist keine Rakete aber es reicht. 20..25 kW würde ich > noch verstehen, aber wozu denn fast 80kW? Die Energie muss ja auch > irgendwo gespeichert werden... Das ist auch vollkommen Sinnlos. Das Hausboot hat mit Sicherheit einen Verdrängerrumpf. D.h. oberhalb der definierten Rumpfgeschwindigkeit kannst du Energie reinstecken wie du willst, damit wird dann nur die Bugwelle größer aber du gewinnst kaum Geschwindigkeit, anders ist das nur bei Gleiterrümpfen, wie sie Schnellboote haben. Die heben sich dann aus dem Wasser, während solch ein Verdrängerrumpf (wenn man davon bei einem Kasten überhaupt sprechen kann) eher tiefer eintaucht, was dann zur höheren Bugwelle führt. Irgendwann schlägt die dann übers Deck und naja, Der Keller wird wohl eher nicht volllaufen. Wasserfahrzeuge verhalten sich hier signifikant anders als Straßenfahrzeuge.
Nachdem Platz und Gewicht keine große Rolle spielen, solltest Du einen fertigen Asynchronmotor verwenden. Da gibt es viele fertige Inverter dazu. Einen Inverter für einen Synchronmotor zu entwickeln ist eine Aufgabe für viele Personen. Du solltest auch Deine Programmierkunst an einen Motorprüfstand testen. Ich denke, die Drehzahl der Schraube wird unter 1000 Upm sein. Damit ein Motor klein wie im Auto wird, muss die Drehzahl hinauf. Drehzahl mal Drehmoment ist die Leistung. Deshalb braucht es dann ein Getriebe. Wenn Du die Verluste Deines Umrichters, Motor und Getriebe zusammenrechnest, wird der Wirkungsgrad nicht viel höher sein als der Asynchronmaschine.
Angehängte Dateien:
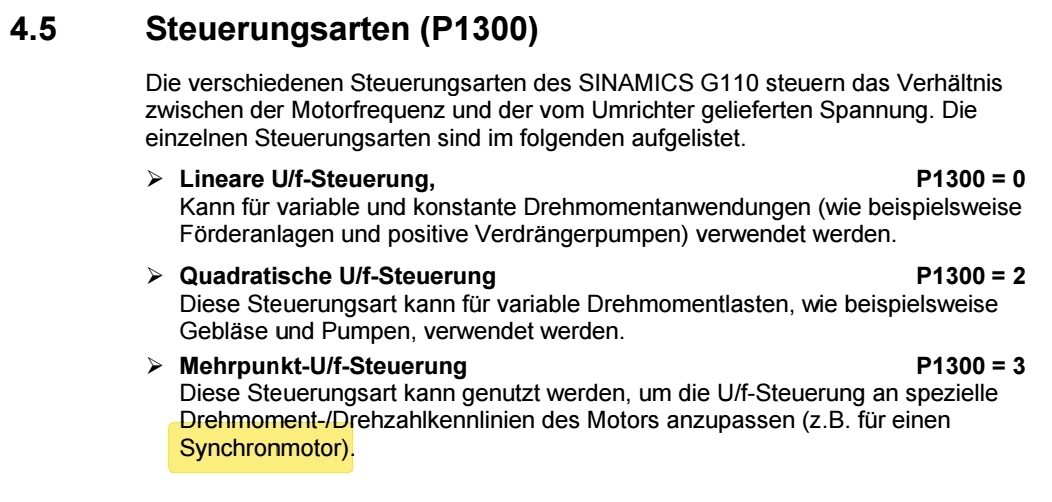
Name: schrieb: > Marvin T. schrieb: > >> Ja die idee hatte ich auch schon, es ist jedoch leider kein >> Drehstromasynchronmotor, sondern scheinbar ein Permanent Magnet Synchron >> Motor und da funktioniert das leider nicht. Außerdem sind FUs in dem >> Leistungsbereich fast unerschwinglich. > > Ich vermute schon, dass es auch FUs gibt die Synchronmotore steuern > können. Bei Servoumrichtern bin ich mir aber zu 100% sicher. In der Anleitung eines - jaja für wesentlich kleinere Motoren vorgesehenen - Siemens-FU habe ich das im Anhang gelesen. Das Ding ist also nicht unbedingt für den Betrieb einer PMSM gedacht, aber wenn man nicht in die Feldschwächung muss geht das schon. Die Ansteuerung ist nicht optimal, idealerweise sollte man das was man an Positivem D-Strom zuviel reinsteckt als Blindleistung abzüglich der resistiven Verluste wieder heraus bekommen. Marvin T. schrieb: > Ich habe mich grade nochmal an Google gesetzt um herauszufinden, was die > Feldschwächung genau bedeutet Einfach gesagt hast du da einen Permanentmagneten, der einem Drehfeld befindet. Doof ist, dass das Drehmoment abhängig vom Strom ist. Bei steigender Drehzahl induziert der in den Spulen drehende Magnet seinerseits Spannung. Man muss von außen mit steigender Drehzahl also mehr Spannung anlegen, um überhaupt einen Strom fließen zu lassen, der dann Drehmoment zur Folge hat. Genau das läuft sich an dem Punkt tot, wo der Motor genau so viel Spannung zurückliefert, wie deine Batterie hat: es ist keine Spannungsdifferenz mehr fürs Drehmoment übrig. Jetzt bedient man sich folgenden Tricks: Wenn man die Rotorposition kennt, kann man aus zwischen ideal Drehmoment erzeugendem Strom (dem Rotor 90° voreilend) und Feld-kontrollierendem Strom (dem Rotor 0° folgend) einen Strom-Vektor zusammensetzen. Den Drehmoment bildenden Strom nennt man "q" und den Feld bildenden Strom nennt man "d". Jetzt muss man ab der Stelle des tot laufens mit negativem d-Strom das Feld der Permanentmagneten schwächen. Damit wird im Motor weniger Spannung induziert und man hat wieder Spannungsdifferenz zum erzeugen von q-Strom zur Verfügung. Old-school sagt man dazu auch "Vorsteuerwinkel erhöhen". Ich hoffe, das klärt es in Kürze etwas auf. mfg mf PS. Vor dem Punkt des Totlaufens kann man ein wenig positiven d-Strom einprägen, womit man je nach Maschine (deren magnetisch wirksamer Geometrie) ein paar Prozent mehr Drehmoment herausholen kann. Hierbei wird ausgenutzt, dass es im Rotor magnetische Pfade mit mehr Eisen gibt, wodurch man ein bisschen Effekte wie bei einer Reluktanzmaschine ausnutzen kann.
Nochmal. Ich würde einen geeigneten großen Vorwiderstand zwischen Versorgung und Leistungskreis setzen und mim Oszilloskop die Spannungen und Ströme im Leistungskreis betrachten. Entweder gibts Überschneidungen beim schalten der Leistung oder Transienten oder beides.
Achim M. schrieb: > Ich hoffe, das klärt es in Kürze etwas auf. Achim M. schrieb: > Genau das läuft sich an dem Punkt tot, wo > der Motor genau so viel Spannung zurückliefert, wie deine Batterie hat Das ist bei jedem permanent erregten D-Bürstenmotor so. Und bei einer Nebenschlussmaschine erreichet man mit dem Feldschwächer zwar eine höhere Drehzahl. Aber bei starkem Feld und höherer Ankerspannung hast Du da bei gleicher Drehzahl ein höheres Moment. Nimmt man halt einen Boost-Converter für die Zwischenkreisspannung.. Ich sehe derzeit keinen bedarf für Hall-Elemente etc. bei der Anwendung hier.
Sinus schrieb: > Das ist bei jedem permanent erregten D-Bürstenmotor so. Hier im Faden geht es um eine PMSM.
Achim M. schrieb: > Sinus schrieb: >> Das ist bei jedem permanent erregten D-Bürstenmotor so. > > Hier im Faden geht es um eine PMSM. Befasse dich mal mit Invertern mit variabler Zwischenkreisspannung. Vielleicht verstehst du den Vergleich dann.
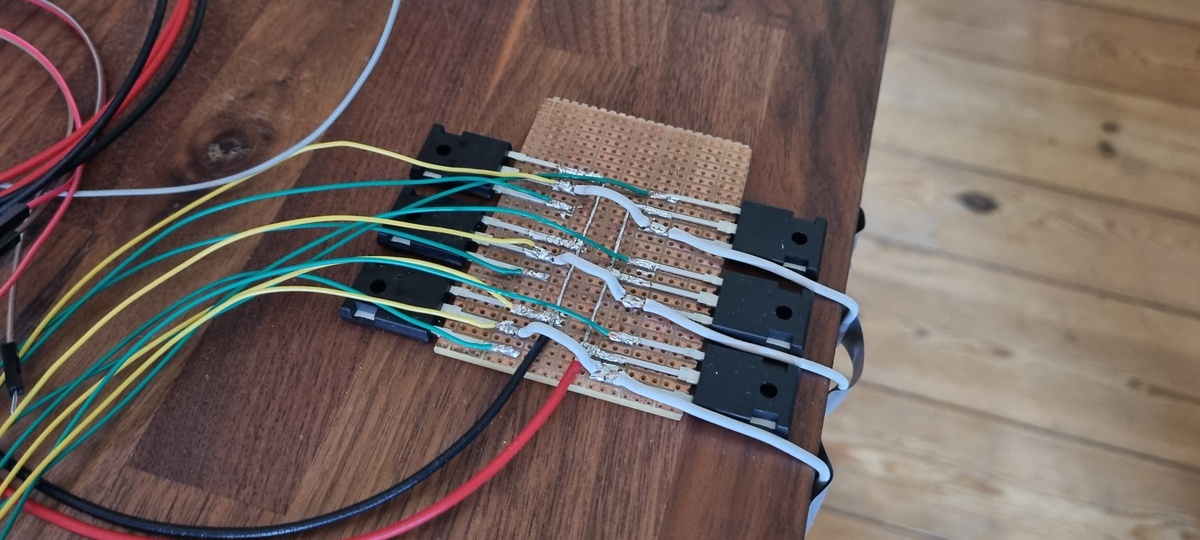
Marvin T. schrieb: > Selbst wenn wir von einem Volt Spannungsabfall ausgehen, was ich > denke schon recht viel ist, Rechne mal eher mit bis zu 2Volt. Die Steuersignale zum Gate-Emitter müssen ordentlich verdrillt sein, mit eigenem Massepotential. Optokoppler sind ja ganz nett, aber sicher (wurde oben schon gesagt) zu langsam. TLP250 kann man sich mal ansehen. Die IGBT sind flink, der Transistor darin recht rboust. Kalt müssen sie bleiben. Die Spannung muss ordentlich abgeblockt werden! Da entstehen sonst irre Spannungsspitzen, welche Dir deine Transistoren killen. Dein Gesamtaufbau ist imposant. Viele werden dich um die Möglichkeiten, welche Dir zur Verfügung stehen, beneiden. Ebenso zeigt dein Aufbau aber auch, das es wohl eines deiner ersten Projekte in dieser Region zu sein scheint. Was hat es mit diesem Bild aufsich? https://www.mikrocontroller.net/attachment/520055/20210607_134606.jpg Weiterhin viel Erfolg beim Basteln. Kontaktiere direkt den Hersteller der IGBT und lass dir für dein Projekt einen Karton von den Dingern zukommen. Zur Not musst du dann am Hausboot ein Werbebanner anbringen. Hast Du einen Schaltplan für uns? Gruß, Axel
{kind=link}
Sinus schrieb: > Achim M. schrieb: > >> Sinus schrieb: >>> Das ist bei jedem permanent erregten D-Bürstenmotor so. >> >> Hier im Faden geht es um eine PMSM. > > Befasse dich mal mit Invertern mit variabler Zwischenkreisspannung. > Vielleicht verstehst du den Vergleich dann. Der Vergleich ist mir durchaus klar. Glaubst du wirklich, der TO baut sich gleich einen Boost-Converter vor seine B6-Brücke? Das würde die Probleme aktuell vervielfachen. Ich denke, es ist besser, erstmal die B6-Brücke zum laufen zu bekommen oder eine Ersatzlösung statt des Eigenbaus zu erarbeiten. mfg mf
Axel R. schrieb: > Was hat es mit diesem Bild aufsich? > https://www.mikrocontroller.net/attachment/520055/20210607_134606.jpg Das zeigt einen Teakholzkühler ;) Oliver
Achim M. schrieb: > Glaubst du wirklich, der TO baut > sich gleich einen Boost-Converter vor seine B6-Brücke? Denke nicht, dass er den braucht. Auch diese Feldschwächung wird er nicht benötigen. > Das würde die > Probleme aktuell vervielfachen. Ich denke, es ist besser, erstmal die > B6-Brücke zum laufen zu bekommen Das habe ich schon weiter oben geschrieben.
Sinus schrieb: > Auch diese Feldschwächung > wird er nicht benötigen. Jup, wenn man die hier im Faden genannten Drehzahlen und Brückenspannungen Straßenfahrzeug-zu-Hausboot vergleicht, wird das Ding komplett vor dem ersten Knick der M-n-Kennlinie betrieben werden. Gut dass wir uns einig sind :) mfg mf
Erstmal vielen Dank an Achim M. Die Erklärung ist wunderbar und einfach verständlich. Außerdem Entschuldigung an "Name:" du hattest scheinbar doch recht und es gibt FUs für Synchronmotoren. Axel R. schrieb: > Was hat es mit diesem Bild aufsich? > https://www.mikrocontroller.net/attachment/520055/20210607_134606.jpg Dass ist die IGBT Brücke die ich grade benutze, da ich nicht schon wieder einen der großen 300A Module sprengen möchte. Das hat einfach preisliche gründe. Da ich momentan auch erstmal mit einem Labornetzteil arbeite, bei dem Ich Strom und Spannung begrenzen kann und keine Angst haben Muss dass ich die große Batterie kurzschließe sollten diese auch von der Dimensionierung ausreichen. Tatsächlich habe ich momentan nur den "Teakholzkühler" daran, da die Rückseite zeitgleich auch leitend ist und ich die Phasen kurzschließen würde, wenn ich alle auf eine Platte schraube. Axel R. schrieb: > Kontaktiere direkt den Hersteller der IGBT und lass dir für dein Projekt > einen Karton von den Dingern zukommen. Zur Not musst du dann am Hausboot > ein Werbebanner anbringen. An sich eine gute Idee, ich mache soetwas allerdings nicht, wenn ich noch nicht sicher sagen kann dass das Projekt erfolgreich verläuft. Das finde ich unfair und setzt mich zu dem unter noch größeren Druck. Axel R. schrieb: > Hast Du einen Schaltplan für uns? ich zeichne grade einen aktuellen, da ich momentan auf dem Breadboard arbeite und sich alles stetig verändert. Axel R. schrieb: > Dein Gesamtaufbau ist imposant. Viele werden dich um die Möglichkeiten, > welche Dir zur Verfügung stehen, beneiden. Auch ich muss zusehen, dass das Projekt finanziell nicht ausartet, sonst hätte ich mir schon ein schönes 4ch Oszilloskope mit 16 Logikeingängen geholt um alles bestmöglich auszurichten. Momentan beneide ich euch um eure Fachkenntnisse. :-D Ich habe natürlich nach dem Post nicht aufgehört zu recherchieren und bin auf eine beeindruckende Library für Arduino gestoßen, welche mir vl. bei dem Motor helfen könnte. https://docs.simplefoc.com/ Kenn die zufällig jemand von euch weiß ob ich damit ne Chance habe oder ob ich mir grade falsche Hoffnungen mache? Zudem habe ich mir ein paar billige BLDCdriver auf Amazon gekauft und dachte ich probiere es mal damit. https://www.amazon.de/Brushless-Motorsteuerung-12V-36V-Ausgeglichenes-Treiber/dp/B07K3WXNYK/ref=sr_1_3_sspa?__mk_de_DE=%C3%85M%C3%85%C5%BD%C3%95%C3%91&crid=2Z5HEWQGMIED7&dchild=1&keywords=bldc+motor+controller&qid=1623244648&sprefix=bldc%2Caps%2C179&sr=8-3-spons&psc=1&smid=A2F7JN9V2AWTSH&spLa=ZW5jcnlwdGVkUXVhbGlmaWVyPUExTE0xWEEyWThINzJUJmVuY3J5cHRlZElkPUEwOTExMzgzM0MyREUwTk4yNDZUWiZlbmNyeXB0ZWRBZElkPUEwMjE4ODIyMUJFNUszTUFOUEI1UCZ3aWRnZXROYW1lPXNwX2F0ZiZhY3Rpb249Y2xpY2tSZWRpcmVjdCZkb05vdExvZ0NsaWNrPXRydWU= Auch wenn die nicht die passende Leistungselektronik haben, könnte die Steuerelektronik ja funktionieren. Dann müsste ich nur größere IGBTs einbauen, oder Leitungen rausziehen um große IGBTs zu verbauen und kann den Motor, dann vl. schonmal im Leerlauf drehen lassen. Dann weiß ich wenigstens dass ich auf dem richtigen Weg bin. Wie Ihr gesehen habt sin die Hallsensoren ja auch mit eigenen 3D-Druck teilen und eingeklebten Magneten nachgerüstet worden. Den wenn man weder weiß ob die Steuerung funktioniert noch ob der Motor funktioniert ist es immer schwer den Fehler zu finden. Achim M. schrieb: > Der Vergleich ist mir durchaus klar. Glaubst du wirklich, der TO baut > sich gleich einen Boost-Converter vor seine B6-Brücke? Das würde die > Probleme aktuell vervielfachen. Ich denke, es ist besser, erstmal die > B6-Brücke zum laufen zu bekommen oder eine Ersatzlösung statt des > Eigenbaus zu erarbeiten. Nein, habe ich tatsächlich erstmal nicht vor. Sobald ich in der Lage bin den Motor im Leerlauf zu drehen, geht es daran die Schaltung zu verbessern und vl. dann auch einen Boost-Converter zu bauen. Momentan geht es mir aber wirklich erstmal darum den Motor überhaupt zum bewegen zu bringen. Gerne auch ohne viel Drehmoment, Hauptsache ich habe eine Basis auf die ich aufbauen kann. Helge schrieb: > Nochmal. Ich würde einen geeigneten großen Vorwiderstand zwischen > Versorgung und Leistungskreis setzen und mim Oszilloskop die Spannungen > und Ströme im Leistungskreis betrachten. Entweder gibts Überschneidungen > beim schalten der Leistung oder Transienten oder beides. Ja, das ist eine gute Idee, jedoch muss sich der Motor zum schalten erstmal in eine Richtung bewegen. Momentan bekomme ich jedoch grade mal ein zucken, ohne dass er es weit genug schafft um den nächsten Hallgeber auszulösen. weiterhin ist ein Wiederstand, welcher die benötigte Leistung aufnehmen kann auch nicht ganz günstig und einfach zu beschaffen. was spricht deiner Meinung nach gegen das Labornetzteil oder eine andere kleine Stromquelle bis sich der Motor dreht? Vielen Dank und beste Grüße Marvin.
Sinus schrieb: > Hi, > erstmal müssen da Blockkondensatoren direkt an die Module an die > Plusminusschienen. Auch die Zuleitungen von den Treibern kurz halten. Patrick H. schrieb: > Da > entstehen dann aber Spannungsspitzen im Zwischenkreis, die dein > Zwischenkreiskondensator abfangen muss Marvin T. schrieb: > Die IGBTs haben alle Freilaufdioden und an Kondensatoren habe ich > gedacht. Da es sich um ein Hausboot handelt, dass langsam über die Spree > schippern soll denke ich, dass der Freilauf als Fehlerhandling reicht. Warum brauchen Hausboote keine Kondensatoren? Wenn ich einen Inverter an Board eines Schiffes nehme, kann ich dann den Zwischenkreiskondensator aus löten und der Inverter arbeitet trotzdem? Entschuldige die blöden Fragen, bin Landratte.
Zu den gegrillten IGBT´s, werden die wirklich "ordentlich" angesteuert? Die Gatespannung muß ja immer deutlich höher sein wie die zu schaltende Spannung damit der IGBT niederohmigst wird. Sonst wird der Leitend wie ein normaler Transistor mit lahmen Flanken und Usat 0,7V. Das macht viel Ptot und führt zum Tod!
der IGBT besteht ja wohl aus 'ner Kombination von FET im Eingang und Bipolar im Ausgang. https://de.wikipedia.org/wiki/Bipolartransistor_mit_isolierter_Gate-Elektrode https://www.rohm.de/electronics-basics/igbt/igbt#:~:text=Ein%20IGBT%20ist%20ein%20bipolares%20Bauelement%2C%20das%20zwei,MOSFET-Struktur%20am%20Eingangsblock%20und%20am%20bipolaren%20Ausgang%20aufweist. Damit mal anfangen. Man kann die Dinger nicht einfach mal ebenso irgendwie am Breadboard zusammenstecken. Ende. Die brauchen ne ordentliche Ansteuerung mit kurzen, niederimpedanten zuleitungen. Auch am Gate-Emitter. Die Steuerspannung muss ohne viel Klingeln und Reflexionen am Gate landen. Messen immer direkt an Gate-Emitter. Um dich mal auf den Weg zu bringen: in welcher Größenordnung bewegen sich denn deine Schaltflanken? Was denkst Du anzustreben? 10 Nanosekunden, 50 NanoSekunden? Reziprok sind das n paar Megahertz. https://www.unitjuggler.com/frequency-umwandeln-von-MHz-nach-ns(p).html?val=20 50 Nanosekunden sind (1durch) 20 MHhz (!!). Du würdest doch nicht ernsthaft irgendwas, was im HF Bereich ordentlich funktionieren soll, mit 20cm langen Litzen, Steckbrettern usw. aufbauen wollen? Deine IGBTs sehen alles mögliche am Eingang, aber kein HL-LH Signal. Du solltest Dich von der Maker-Mentalität verabschieden und das Projekt in mehrere Baustellen untergliedern. Ansteuerung: Hardware: also Stromlaufplan -> Leiterplatte. Software: Lib suchen? (entscheide selbst) Leistungsteil: dito, Stromlaufplan -> Leiterplatte Stromversorgung: Stromlaufplan -> Verschaltung (Zwischenkreiskondensator usw) Gedanken machen zur Übergabeschnittstelle Ansteuerung -> Leistungsteil -- Zu den Spannungsspitzen: U=L*d_i/d_t ich gebe zu, dass ich jetzt zu 100% im Bilde bin, wie groß deine parasitären Induktivitäten im Aufbau sind, wie sich der Motor dort verhält usw... Ich rate, deine IGBTs sterben wegen mischimaschi am Gate und den sich daraus resultierenden hohen Frequenzspektren und unkontrolliertem Geschwinge. -- Ich habe sowas schon mal gebaut. Aber mit 120Volt und 2 x 2KW Bürstenmotore parallel. Selbst das war schon ne heikle Aktion. Ich wünsche weiterhin viel Spaß beim gemeinsamen Hobby. Gruß Axel (ich lese jetzt mal nicht groß gegen..)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.