Hallo, Ich haben allgemeine Fragen bezüglich CAN Bus. Ich habe die Datenblätter verschiedenen Steuergeräte eines Fahrzeugs wie (ECU,BMS,Getriebe Steuergerät.. ) und diese Steuergeräte sollen mit Sensoren, mechanischen und elektrischen Teilen verbunden sein und habe auch ein Zentralsteuergerät. Diese Steuergeräte sollen mit dem Zentralsteuergerät durch CAN Bus verbunden sein, die Informationen und Befehle dazwischen tauchen zu können. Darüber hinaus das Zentralsteuergerät soll mit andern Sensoren verbunden sein. Es ist wichtig hier zu erwähnen, dass die Steurgeräte von verschiedene Herstellern erzeugt wurden. Die Fragen sind : -wie kann ich das geeignetes CAN Bus auswählen. -Wie kann ich wissen, ob ich nur ein oder mehrere CAN Busse benütige, um alle Steuergeräte und Sensoren mit dem Zentralsteuergerät zu verbinden. - Gibts vielleicht Szenario zu folgen, wie geeigents CAN Bus ausgewählt werden kann? z.B. Geschwindigkeit der Informationsübertragung/ Protokoll... Danke im Voraus
CAN heißt einige genormte Verbindungsschnittstellen. Mehr nicht. Welche Daten was bedeuten, Baudrate oder Modus kann jeder frei wählen. Analogie: Ethernet. Verschiedene Stecker, Übertragungsraten, Zugriffsverfahren, Inhalte. Ethernet heißt noch nicht unbedingt, dass ein Gerät auch TCP/IP kann, geschweige denn einen Zugriff per Webbrowser erlaubt.
Khamaysa schrieb: > Die Fragen sind : Ich verstehe nicht ganz, was deine Ausgangssituation ist. Hast du ein Auto und willst jetzt sehen, was da übertragen wird? Oder hast du ein paar existierende Steuergeräte, die du selber irgendwie miteinander verbinden musst? Oder willst du quasi ein ganzes Auto bauen?
Khamaysa schrieb: > -wie kann ich das geeignetes CAN Bus auswählen. Im KFZ? gar nicht. Das legt der Fahrzeughersteller fest. Khamaysa schrieb: > Gibts vielleicht Szenario zu folgen, wie geeigents CAN Bus ausgewählt > werden kann? z.B. Geschwindigkeit der Informationsübertragung/ > Protokoll... Bei PKW legt das der OEM fest (in der Regel projektspezifisch). Üblicherweise werden auf dem Powertrain CAN 500 kBit/s verwendet. Andere CANs können andere Bitraten haben. A. S. schrieb: > CAN heißt einige genormte Verbindungsschnittstellen. Bei Nutzfahrzeugen wird normalerweise SAE J1939 verwendet dort liegt dann auch die Baudrate und einige genormte Botschaften fest. Gruß Anja
Khamaysa schrieb: > -wie kann ich das geeignetes CAN Bus auswählen. Ist das jetzt für eine Hausarbeit von der Uni? > -Wie kann ich wissen, ob ich nur ein oder mehrere CAN Busse benötige, um > alle Steuergeräte und Sensoren mit dem Zentralsteuergerät zu verbinden. Lernen wie CAN funktioniert und dann den Bus auslegen. > - Gibts vielleicht Szenario zu folgen, wie geeigneten CAN Bus ausgewählt > werden kann? z.B. Geschwindigkeit der Informationsübertragung/ > Protokoll... In der Dokumentation der Steuergeräte nachlesen was die gerne hätten.
Ich habe den Hintergrund der Frage auch nicht verstanden. Du hast ein Auto und möchtest zusätzliche Sensoren einbauen? Evtl. wäre es auch hilfreich wenn du verrätst um was für ein Auto es sich handelt.
Angehängte Dateien:
Also, wir sind ein Team an der Uni und arbeiten zusammen um ein Hybridfahrzeug mit einem neuen System zu bauen. Dieses Fahrzeug wird mit verschieedenen Funktionen bzw. Bauteile gebaut und jedes Teil hat sein Steuergerät, diese Steuergeräte sind nicht von dem gleichen Herstellern zu sagen, ok '' Es gibt jetzt nur ein CAN Bus und kann mit allen diese Steuergeräte verbunden sein wie z.B bei einem bereit hergestelten Fahrzeugen'', aber kann es auch sein das weis ich nicht und mein Aufgabe das zu prüfen. alle diese Steuergeräte müssen mit einem Zentralsteuergerät dursch ein oder mehrere CAN Busse angeschlossen werden, dazu gibt andere Sensoren, sollen auch dirkt mit dem Zentralsteuergerät verbunden sein und dieses Zentralsteuergerät hat mehrere CAN Bus Anschlüsse, die die Verbindung von verschiedenen CAN Busse erlauben. wie im Bild dargestellt wurde. Wie ich weiß, es gibt verschiedene Busse mit verschiedenen Geschwendigkeiten der Informationsübertragung, aber haben auch verschiedene Kosten und andere Eigenschaften. Beispielswise: Meine Ergebnisse sollen so aussehen: -Steuergeräte 1,2,3 müssen durch Class C Bus mit dem Zentralsteuergerät verbunden sein. -Steuergeräte 5,6 müssen durch Class C+ Bus mit dem Zentralsteuergerät verbunden sein. -Sonsoren A,b sollen durch ..... und muss das am Ende Begründen Also, Nach meiner Verständnis kann ich das nur durch die Informationen in den Datenblätter der verschiedenen Steuergeräte entscheiden. Aber welsche Eigenschafeten in den Datenblatter, die ich durch suchen soll ?, oder wie kann ich das schaffen zu sagen, alle Steuergeräte und Sensoren können durch ein CAN Bus mit dem Zentralsteuergerät verbunden sein und dieses Can Bus ist z.B Class D Bus mit 150 Mbit/s Geschwendigkeit. Also, davon kan man auch ausgehen, dass die Geschwendigkeit der Informationsübertragung eine Rolle spielt, aber wie, ich weiß nicht genau. z.B sollen die gewünschte Geschwendigkeit des Buses gleich, mehr oder weniger als die im Steuergerät steht ! ES gibt vermutlich andere Eigenschaften , die eine entscheidende Rolle bei der Auswahl von CAN Bus, aber welsche ?
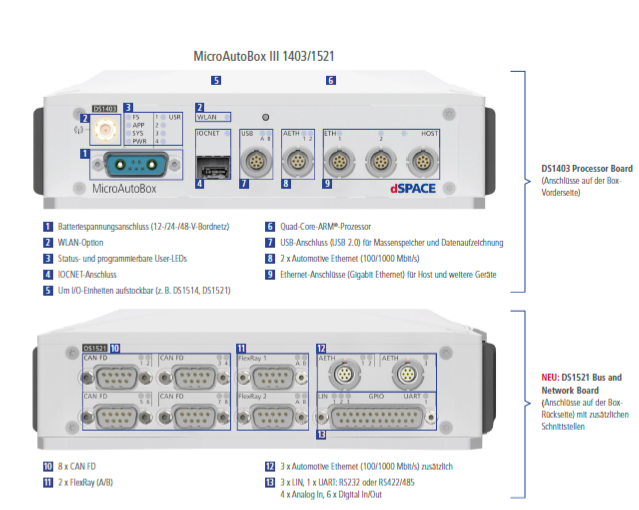
Ahmed A. schrieb: > Can Bus ist z.B Class D Bus mit 150 Mbit/s > Geschwindigkeit. Was meinst du mit Class D? Bei CAN-Bus habe ich das noch nie gehört. Und 150MBit gibt es nicht bei CAN. CAN 2.0 geht bis max. 1MBit/s. > Also, davon kan man auch ausgehen, dass die Geschwendigkeit der > Informationsübertragung eine Rolle spielt, > aber wie, ich weiß nicht genau. z.B sollen die gewünschte > Geschwendigkeit des Buses gleich, mehr oder weniger als die im > Steuergerät steht ! Alle Steuergeräte an einem Bus müssen natürlich die gleiche Geschwindigkeit haben. Wenn beispielsweise nur eines kein CAN-FD kann so müssen alle anderen auch bei CAN 2.0 bleiben. Da im automotive-Bereich für CAN2.0 die 500kBit/s als quasi-Standard gelten so empfiehlt es sich diese Geschwindigkeit auch zu verwenden - für alle Busse. > ES gibt vermutlich andere Eigenschaften , die eine entscheidende Rolle > bei der Auswahl von CAN Bus, aber welche? - Anzahl der Signale und Anzahl der Botschaften. - Wiederholungsintervall der Botschaften. Aus diesen beiden lässt sich schon mal die Buslast berechnen und man sieht ob man mit High-Speed CAN mit 500kBit hinkommt. Die dscapce AutoBox ist schon ein ziemliches Monster. Wie wollt ihr das programmieren wenn ihr nicht mal den CAN-Bus auslegen könnt?
Ahmed A. schrieb: > Also, Nach meiner Verständnis kann ich das nur durch die Informationen > in den Datenblätter der verschiedenen Steuergeräte entscheiden. Kommt drauf an. Kannst du die Software auf diesen Steuergeräten irgendwie beeinflussen oder sind die eben so, wie sie sind? > Aber welsche Eigenschafeten in den Datenblatter, die ich durch suchen > soll ?, oder wie kann ich das schaffen zu sagen, alle Steuergeräte und > Sensoren können durch ein CAN Bus mit dem Zentralsteuergerät verbunden > sein und dieses Can Bus ist z.B Class D Bus mit 150 Mbit/s > Geschwendigkeit. Ein klassischer CAN-Bus kann maximal 1 Mbit/s. Mit CAN Fd und CAN XL kann man auch höher gehen, aber keiner davon erreicht auch nur annähernd 150 Mbit/s. Das Maximum liegt bei CAN XL mit 10 Mbit/s. Bei klassischem CAN gibt es außer der Bitrate und dem Sample Point nicht viel zu konfigurieren. Sofern zumindest die Bitrate übereinstimmt, kann man alle Steuergeräte an einen Bus hängen. Wenn die unterschiedlich ist, geht das nicht. > Also, davon kan man auch ausgehen, dass die Geschwendigkeit der > Informationsübertragung eine Rolle spielt, > aber wie, ich weiß nicht genau. z.B sollen die gewünschte > Geschwendigkeit des Buses gleich, mehr oder weniger als die im > Steuergerät steht ! Du musst dir anschauen, wie viele Botschaften das Steuergerät pro Sekunde sendet und wie viele du ihm senden musst. Daraus kannst du die Buslast ermitteln, und die sollte nicht über etwa 50% liegen. Eine andere Frage wäre, ob es einen Grund gibt, bestimmte Steuergeräte physisch von einander zu trennen, damit sie sich nicht gegenseitig beeinflussen können. Zum Beispiel ein Comfort-CAN und ein Motor-CAN, damit der Fensterheber nicht die engen Timings der Zündungssteuerung durcheinander bringen kann.
Thomas F. schrieb: > Alle Steuergeräte an einem Bus müssen natürlich die gleiche > Geschwindigkeit haben. Wenn beispielsweise nur eines kein CAN-FD kann so > müssen alle anderen auch bei CAN 2.0 bleiben. Das stimmt nicht. CAN FD ist extra dafür ausgelegt, dass ein Mischbetrieb möglich ist.
Rolf M. schrieb: > Thomas F. schrieb: >> Alle Steuergeräte an einem Bus müssen natürlich die gleiche >> Geschwindigkeit haben. Wenn beispielsweise nur eines kein CAN-FD kann so >> müssen alle anderen auch bei CAN 2.0 bleiben. > > Das stimmt nicht. CAN FD ist extra dafür ausgelegt, dass ein > Mischbetrieb möglich ist. Nein, sobald ein Knoten im Netz einen CAN-FD Frame versendet müssen alle Teilnehmer mindestens CAN-DF tolerant sein. D.h. den FD-Frame mindestens ignorieren können. Ein klassischer CAN 2.0 Controller (z.B. MCP2515) würde mit einem Error Frame auf einen CAN-FD Frame reagieren und irgendwann dann Bus-Off gehen. Matthias
Ahmed A. (kamaysa) 18.06.2021 04:36 "Also, Nach meiner Verständnis kann ich das nur durch die Informationen in den Datenblätter der verschiedenen Steuergeräte entscheiden." Ich bin nicht sicher, ob die Datenblätter für einzelne Steuergeräte hier was nützen. Entscheidend ist, wie die verschiedenen Steuergeräte auf dem CAN-Bus zusammenarbeiten. Dafür gibt es DBC-Files (database can) vom Fahrzeughersteller, Dateieindung "*.dbc", in denen die Kommunikation der verschiedenen Geräte, die auf einem CAN-Bus zusammenarbeiten, definiert wird. Diese Dateien sind in der Regel nicht öffentlich zugänglich. Ohne die Datei hat man aber kaum eine Chance, zu verstehen, was da auf dem Bus passiert. Arbeitet ihr mit einem bestimmten Hersteller zusammen? Dann versuche, die DBC-Files zu bekommen. Im DBC-Files sind "Signals" definiert, das sind einzelne Informationen wie z.B. Ölmenge in Litern mit einer bestimmten Codierung oder auch einzelne Bits wie "Fahrzeug ist verriegelt". Das können je nach Fahrzeug mehrere Tausend solche "signals" sein. Weiter sind da "Messages" definiert. Darin sind mehrere "Signals" in bis zu 8 Byte langen Bitfolgen zusammengefasst. Wie gesagt, ohne das DBC-File hat man praktisch keine Chance, das zu verstehen. Wenn Du jetzt noch eigene Signals und Messages einbauen willst, musst Du auch wissen, welche Signals und Messages es schon gibt, damit es keine Kollisionen gibt. Dafür gibt es einen Editor namens "Vector CANdb++" von der Vector Informatik GmbH, der kostenlos erhältlich und nutzbar ist. Ein weiteres Problem ist die "Restbussimulation". Oft brauchen Steuergeräte noch Informationen von anderen Steuergeräten, die auf den ersten Blick gar nichts mit der eigentlichen Funktion zu tun haben, z.B. "sind die Türen geschlossen", "ist die Zündung eingeschaltet", "läuft der Motor" etc.
Keiner wird euch hier die verpaßten Vorlesungen in Elektronik und Netzwerktechnik etc. vorkauen. Also einfach die zwei einzigen Bücher zum Thema CAN und OBD in der Bibliothek ausleihen oder kaufen und erst einmal lernen, was CAN ist und wie es funktioniert. Das es versch. Stgs für versch. Aufgaben gibt, ist keine neue von euch entwickelte Technik, sondern seit mind. 30 Jahren gängig. Und da man keine ECU von der Stange kaufen kann, um sie in ein neues Auto einzusetzen, werdet ihr wohl eher Simulatoren nutzen.
Angehängte Dateien:
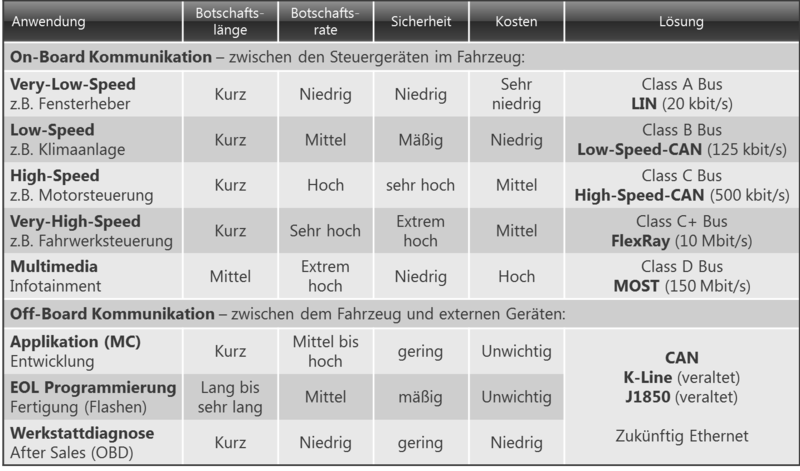
> Was meinst du mit Class D? Bei CAN-Bus habe ich das noch nie gehört. Und > 150MBit gibt es nicht bei CAN. > CAN 2.0 geht bis max. 1MBit/s. Ich war niemals mit CAN Bus vorher beschaftigt, aber habe danach gesucht und gibts verschiedene Busse wie Most oder FlexRey haben hohe Geschwendigkeit, wie im Bild zu sehen. > Alle Steuergeräte an einem Bus müssen natürlich die gleiche > Geschwindigkeit haben. Wenn beispielsweise nur eines kein CAN-FD kann so > müssen alle anderen auch bei CAN 2.0 bleiben. Ich habe die Datenblätter der Verschiedenen Steuergeräte nachgeschaut und bin durch Ihre Antworten davon ausgegangen, dass die Geschwendigkeit des CAN Bus und die Steuergeräte ähnlich sein müssen. Aber, Ich habe beispielsweise bei dem ECU Steuergerät gesehen, dass die Bitrate bzw. die Geschwendigkeit der Informationsübertragung als Bereich gezeigt werden und zwar zwischen 125-1000 Bit/s !. Bei anderem Steuergerät steht ( über 500 bit/s) !. und bei den Datenblätern des Zentralsteuergeräts von Microautobox steht ( Host interface = 10/100/1000 Bit/s) und das wurde als Input und Autput geschrieben Also, kann man davon ausgehen, dass hier ein CAN Bus mit 1000 Bitrate erforderlich ist, diese drei Steuergeräte miteinander zu verbinden ? Es ist hier wichtig zu erwähnen, dass erste genannte Steuergeräte haben die gleiche Identifier und zwar 11 Bit. Gibts vieleicht Klassifizierungen oder Versionen von CAN Bussen oder etwas so, Etwas anders als im Bild.? > Da im automotive-Bereich für CAN2.0 die 500kBit/s als quasi-Standard > gelten so empfiehlt es sich diese Geschwindigkeit auch zu verwenden - > für alle Busse. >> ES gibt vermutlich andere Eigenschaften , die eine entscheidende Rolle >> bei der Auswahl von CAN Bus, aber welche? > > - Anzahl der Signale und Anzahl der Botschaften. > - Wiederholungsintervall der Botschaften. Meinen Sie mit dem Widerholungsinterval der Identefier z.B 11 bit oder ? Falls nein Konnten Sie mehr erklären was Sie unter diesen zwei Punkten gemeint haben ? > Aus diesen beiden lässt sich schon mal die Buslast berechnen und man > sieht ob man mit High-Speed CAN mit 500kBit hinkommt. Da ich niemals mit dem CAN Bus beschaftigt war,habe ich eine verstädnisfrage diesbezüglich. Also, CAN Bus High und CAN Bus low sind zwei Kapeln und drehen sich umeinandern, aber wie kann die andere Steuergeräte damit verbunden sein ?. Braucht die verbindung dazwischen ein bestimmtes Gerät ? > Die dscapce AutoBox ist schon ein ziemliches Monster. Wie wollt ihr das > programmieren wenn ihr nicht mal den CAN-Bus auslegen könnt? Programierung ist nicht meine Aufgabe und gibts andere Gruppen, die dafür ständig sind aber wir müssten in unserem Bericht erklären wie die CAN Bus ausgewählt werden mussten und wir sollen darauf zu achten, dass die Anzahl von CAN Busse aus Kostengründen möglichst niedrig sein sollten.
> Eine andere Frage wäre, ob es einen Grund gibt, bestimmte Steuergeräte > physisch von einander zu trennen, damit sie sich nicht gegenseitig > beeinflussen können. Zum Beispiel ein Comfort-CAN und ein Motor-CAN, > damit der Fensterheber nicht die engen Timings der Zündungssteuerung > durcheinander bringen kann. Ja Es gibt Sensoren und gibt Steuergeräte und müssen mit dem Zentralsteuergerät verbunden sein. Wir haben ein Hybridbetrieb, also das Fahrzeug fährt erliktrisch oder mit dem Verbrennungsmotor oder gemisch dazwischen und das hängt von den Fahrgebersignal ab. Also, der Fahrgebersignal MUSS dirkt mit dem Zentralsteuergerät verbunden sein. Der Grund dafür ist Sicherbetrieb. Normalerweise bei den heutigen Fahrzeugen ist der Fahrgeber mit dem ECU verbunden, aber wir haben anderes Steuergerät für E-Betrieb und kann auch der Fahrgeber damit verbunden. Aber kann beim Fahren ein Betrieb ausfallen (z.B Problem mit ECU ), und das Fahrzeug mit einem Betrieb Fahren kann, daher muss der Fahrgebersensor dirkt mit dem Zentralsteuergerät verbunden sein. Also, Unsere Aufgabe ist, es zu prüfen, wie das Sensor mit Zentralsteuergerät verbunden sein soll, oder welsche CAN Bus zum Einsatz hier kommt.
Ahmed A. schrieb: > Ich habe die Datenblätter der Verschiedenen Steuergeräte ... > die Geschwendigkeit des CAN Bus und die Steuergeräte ähnlich sein müssen. Nein, nicht ähnlich, sondern gleich. > Aber, Ich habe beispielsweise bei dem ECU Steuergerät gesehen, dass die > Bitrate bzw. die Geschwendigkeit der Informationsübertragung als Bereich > gezeigt werden und zwar zwischen 125-1000 Bit/s !. Die Geschwindigkeit jedes Steuergeräts kann man in der Software einstellen. > Bei anderem Steuergerät steht ( über 500 bit/s) !. > und bei den Datenblätern des Zentralsteuergeräts von Microautobox steht > ( Host interface = 10/100/1000 Bit/s) und das wurde als Input und Autput > geschrieben Das ist dann aber vermutlich nicht CAN, sondern Automotive Ethernet. > Also, kann man davon ausgehen, dass hier ein CAN Bus mit 1000 Bitrate > erforderlich ist, diese drei Steuergeräte miteinander zu verbinden ? Nein. Du musst die Bitrate berechnen. > Es ist hier wichtig zu erwähnen, dass erste genannte Steuergeräte haben > die gleiche Identifier und zwar 11 Bit. Nein. Keine zwei Steuergeräte dürfen gleiche Identifier benützen. Ob die Identifier dann 11 oder 29 Bit lang sind ist erst einmal egal. Du musst zuerst einmal verstehen wie CAN funktioniert. Dazu gibt es massenhaft Informationen in Büchern oder im Netz. https://elearning.vector.com/mod/page/view.php?id=111 > Gibts vieleicht Klassifizierungen oder Versionen von CAN Bussen oder > etwas so, Etwas anders als im Bild.? Vergiss das Bild und die genannten Klassen. Lerne zuerst wie CAN funktioniert.
Thomas F. schrieb: > Nein. Keine zwei Steuergeräte dürfen gleiche Identifier benützen. Es wäre gut, wenn aus Sicht einer ECU die TX-Frames nicht zusätzlich von einer anderen ECU kommen. RX-Frames dürfen und müssen sich meist in mehreren ECUs überschneiden. mfg mf
Ahmed A. schrieb: > Aber welsche Eigenschafeten in den Datenblatter, die ich durch suchen > soll ?, oder wie kann ich das schaffen zu sagen, alle Steuergeräte und > Sensoren können durch ein CAN Bus mit dem Zentralsteuergerät verbunden > sein und dieses Can Bus ist z.B Class D Bus mit 150 Mbit/s > Geschwendigkeit. Ahmed A. schrieb: > 800px-Bussystems-UseCasesII.png Das, was in der Tabelle als Class D bezeichnet ist, ist kein CAN Bus. Highspeed-CAN geht bis 1MB/s (Class C Bus in der Tabelle)
Thomas F. schrieb: >> Aber, Ich habe beispielsweise bei dem ECU Steuergerät gesehen, dass die >> Bitrate bzw. die Geschwendigkeit der Informationsübertragung als Bereich >> gezeigt werden und zwar zwischen 125-1000 Bit/s !. > > Die Geschwindigkeit jedes Steuergeräts kann man in der Software > einstellen. Wobei "man" hier jemand sein muss, der den Quellcode der Software des Steuergeräts und die nötige Build-Umgebung sowie Hard- und Software zum Flashen besitzt. Es sei denn, das Steuergerät bietet irgendeine Möglichkeit, die Bitrate zu konfigurieren. Dann wird Software für die entsprechende Kodierung benötigt.
So wie ihr im dunkeln stochert seh ich mal kohlrabeschwarz für euer Projekt. Zunächt mal müsst ihr rausfinden wie man die ECUs konfiguriert/flasht. Im Prinzip können die warscheinlich alle 125kbit-1Mbit oder auf bis 10Mbit und CAN FD. In der Regel teilt man die Busse ein einem Fahrzeug nach funktionsgruppen. - Motor&Getriebe (Oder BMS/E-Motor) - Peripherie wie Licht, Insassenerkennung, Türkontakte - Safety (Airbag, ESP, ABS) - Kombi - Infotainment Die Datenrate wird dann durch den langsamsten Teilnehmer oder die Bus-topologie bestimmt. Die MABX hat 4 CAN Controller die alle CAN FD bis 10MBit können, daran scheitert es also nicht. Flexray fasst kein Mensch freinwillig an. Das Host interface der MABX geht zum Steuer-PC und hat nichts mit den Fahrzeugbussen zu tun. MOST werdet ihr wohl kaum benuzten, außer ihr woll Videos oder Radardaten übertragen.
Autobauer schrieb: > Motor&Getriebe (Oder BMS/E-Motor) > Peripherie wie Licht, Insassenerkennung, Türkontakte > Safety (Airbag, ESP, ABS) > Kombi > Infotainment ... und 1-2 Diagnose-Busse. Die müssen aber je nach Autobauer nicht unbedingt CAN sein. mfg mf
Die Fragen sind : -wie kann ich das geeignetes CAN Bus auswählen. -Wie kann ich wissen, ob ich nur ein oder mehrere CAN Busse benütige, um alle Steuergeräte und Sensoren mit dem Zentralsteuergerät zu verbinden. - Gibts vielleicht Szenario zu folgen, wie geeigents CAN Bus ausgewählt werden kann? z.B. Geschwindigkeit der Informationsübertragung/ Protokoll... Das legt alles der Fahrzeughersteller fest. Du brauchst die Busbeschreibung (mdc-Datei). Das wäre das erste, worum ich mich kümmern würde. In der mdc ist festgelegt, wie die Topologie aufgebaut ist und wer welche Signale sendet. Festgelegt ist dort auch die Zykluszeit und die Auflösung. Vielleicht könntest du kurz sagen, um welchen Hersteller es geht und was eigentlich genau die Aufgabe ist.
Steuergeräte-Entwickler schrieb: > Vielleicht könntest du kurz sagen, um welchen Hersteller es geht und was > eigentlich genau die Aufgabe ist. Hat er doch schon gemacht. Er ist selbst der Hersteller, irgendwie... Ahmed A. schrieb: > Also, wir sind ein Team an der Uni und arbeiten zusammen um ein > Hybridfahrzeug mit einem neuen System zu bauen. Dieses Fahrzeug wird mit > verschieedenen Funktionen bzw. Bauteile gebaut und jedes Teil hat sein > Steuergerät, diese Steuergeräte sind nicht von dem gleichen Herstellern > zu sagen, ok '' Es gibt jetzt nur ein CAN Bus und kann mit allen diese > Steuergeräte verbunden sein wie z.B bei einem bereit hergestelten > Fahrzeugen'', aber kann es auch sein das weis ich nicht und mein Aufgabe > das zu prüfen.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.