Hallo Leute, ich habe hier eine Anwendung wo ich im uC intern ein 16-Bit Datenwort habe, welches in ein 32-Bit Wort umgewandelt werden muss, allerdings gefüllt mit einem 0-Bit an jeder zweiten Stelle. Hintergrund ist der, dass ich an einer SPI ein Modul angeschlossen habe, welches allerdings nur auf jede zweite Flanke der SPI clock das Bit aufnehmen kann. Also wenn ich 1101 0101 1111 0110 habe, sollte daraus ganz einfach dann 10100010 00100010 10101010 00101000 werden. Wie kann man so etwas möglichst Effizient umsetzen (abgesehen von den üblichen Bit-Shifting und Verknüpfungsmethoden)? Danke
Man könnte 4 bytes aus einer 16er Tabelle entnehmen, indiziert mit jeweils einem nibble, oder 2 Worte aus einer 256er Tabelle indiziert mit jeweils einem byte.
SPI schrieb: > an einer SPI ein Modul angeschlossen habe, welches allerdings nur auf > jede zweite Flanke der SPI clock das Bit aufnehmen kann. Ist das so dokumentiert?
Machts was aus wenn das Bit zweimal gleich übertragen wird? Dann evtl. eine Hardware nutzen. Oder: einfach eine Funktion mit 8 ifs die 8 bit bekommt und 16 bit ausspuckt. Sind je nach Controller auch nur ~25 Befehle in Maschinensprache.
SPI schrieb: > welches allerdings nur auf jede zweite Flanke der SPI clock das Bit > aufnehmen kann. Das ist doch bei SPI immer so, oder meintest Du, an jeder 4. Flanke. Man könnte auch mit einem RC-Glied und EXOR aus jeder Flanke einen Puls machen.
Das sind maximal 16 if. Egal wie formuliert.
1 | uint32_t d=0; |
2 | uint16_t s=...; |
3 | |
4 | if(s&1) d|=1; |
5 | if(s&2) d|=2; |
6 | ...
|
7 | if(s&0x8000) d|= 0x40000000) |
8 | |
9 | oder
|
10 | |
11 | d= (s&1)<<0 + (s&2)<<2 + ... (s&0x8000)<<30; |
12 | |
13 | oder
|
14 | |
15 | uint16_t m=0x8000; |
16 | |
17 | while(m) {d<<=1; if(s&m) d++; m>>=1;} |
18 | |
19 | //falls die 0 davor soll. Sonst entsprechend die Versionen drehen!
|
probier da einfach verschiedene intuitive Varianten und schaue, ob es schnell genug ist. Manchmal erkennt der Compiler, was zu tun ist. Erst wenn da ein Flaschenhals ist, kümmere Dich darum. Gerade die erste Version kann je nach Prozessor in 1-2 Takten je Bit umgesetzt werden.
(prx) A. K. schrieb: > SPI schrieb: >> an einer SPI ein Modul angeschlossen habe, welches allerdings nur auf >> jede zweite Flanke der SPI clock das Bit aufnehmen kann. > > Ist das so dokumentiert? Und vor allem: wie synchronisiert man das wieder, wenn es mal aus dem Tritt gekommen ist?
(prx) A. K. schrieb: > SPI schrieb: >> an einer SPI ein Modul angeschlossen habe, welches allerdings nur auf >> jede zweite Flanke der SPI clock das Bit aufnehmen kann. > > Ist das so dokumentiert? Ich habe hier ein relativ spezielles Konstrukt. Quasi eine SPI die selber im Slave-Mode arbeitet und mit genau 6.144 MHz getaktet wird, weil ich ein Stereo PDM-Mems Mikrofon-Signal samplen will. Die Mikrofone kriegen aber nur eine 3.072 MHz clock (diese pushen jeweils aber auf steigende und fallende Flanke raus). Also muss ich die SPI doppelt so schnell takten. gleichzeitig will ich aus dem SPI Modul ein I2S Signal rausgeben, welches seine Bits aber zu der 3.072 MHz clock referenziert haben soll. Also pusht die SPI doppelt so viele Bits raus wie nötig. Danke für euren Support, ich werde mich mal dran versuchen.
SPI schrieb: > Wie kann man so etwas möglichst Effizient umsetzen Was ist dein Kriterium für Effizienz? Speicherplatz, Rechenzeit, Zeilenzahl Quellcode ...?
SPI schrieb: > uC Dann geht das mit zwei einfachen Zuweisungen:
1 | OUTPORT = data16; |
2 | data32 = INPORT; |
Dazu müssen die zu INPORT und OUTPORT gehörenden I/O-Pins extern wie folgt verschaltet werden:
1 | INPORT |
2 | 0 oooooooooooooooooooooooooooooooo 31 |
3 | ┴│┴│┴│┴│┴│┴│┴│┴│┴│┴│┴│┴│┴│┴│┴│┴│ |
4 | ┌┘ │ │ │ │ │ │ │ │ │ │ │ │ │ │ │ |
5 | │┌─┘ │ │ │ │ │ │ │ │ │ │ │ │ │ │ |
6 | ││┌──┘ │ │ │ │ │ │ │ │ │ │ │ │ │ |
7 | │││┌───┘ │ │ │ │ │ │ │ │ │ │ │ │ |
8 | ││││┌────┘ │ │ │ │ │ │ │ │ │ │ │ |
9 | │││││┌─────┘ │ │ │ │ │ │ │ │ │ │ |
10 | ││││││┌──────┘ │ │ │ │ │ │ │ │ │ |
11 | │││││││┌───────┘ │ │ │ │ │ │ │ │ |
12 | ││││││││┌────────┘ │ │ │ │ │ │ │ |
13 | │││││││││┌─────────┘ │ │ │ │ │ │ |
14 | ││││││││││┌──────────┘ │ │ │ │ │ |
15 | │││││││││││┌───────────┘ │ │ │ │ |
16 | ││││││││││││┌────────────┘ │ │ │ |
17 | │││││││││││││┌─────────────┘ │ │ |
18 | ││││││││││││││┌──────────────┘ │ |
19 | │││││││││││││││┌───────────────┘ |
20 | ││││││││││││││││ |
21 | 0 oooooooooooooooo 15 |
22 | OUTPORT |
Falls dein µC nicht die benötigten 48 I/O-Pins hat, kannst du die Konvertierung auch in kleineren Häppchen, bspw. byteweise vornehmen. Das ist immer noch einfacher und schneller, als die Daten bitweise zu bearbeiten.
Beitrag #6743250 wurde von einem Moderator gelöscht.
Man kann auch den RB1632 von RubeGoldbergSemiconductors kaufen, gut, momentan schwer erhältlich, aber der wurde speziell dafür entwickelt. Das reduziert das ganze auf ein IC, angesteuert mit /Rd, /Wr, 16 DI und 32 DO, kann 5 oder 3,3V bei bis zu 33MHz. Ist im TQFP48 erhältlich, also relativ platzsparend. Oder man baut die Funktion nach, z.B. mit 6 Schieberegistern, I²C- oder SPI-Portextendern oder (so vorhanden) 4 Portlatches aus der 74er-Familie.
Jens M. schrieb: > Oder man baut die Funktion nach, z.B. mit 6 Schieberegistern, I²C- oder > SPI-Portextendern oder (so vorhanden) 4 Portlatches aus der > 74er-Familie. Oder mit einem CPLD.
Zero-Stuffing ist was anderes. Das hier ist ein Spezialfall (x := 0 oder y: = 0) von "Morton numbers" bzw. eigentlich "Morton code". Die klassischen Algorithmen findet man ab hier https://graphics.stanford.edu/~seander/bithacks.html#InterleaveTableObvious Alle vier Algorithmen lassen sich unter der Vorgabe dass z.B. y = 0 ist noch vereinfachen. Für mehr Spaß gibt es auch Erweiterungen auf 3D, z.B. https://www.forceflow.be/2013/10/07/morton-encodingdecoding-through-bit-interleaving-implementations/
Wieso eigentlich 16 Bit Eingang? SPI-Midule sind doch oft 8-bittig organisiert, so dass 16er oder 256er Tabellen sehr effektiv sein dürften.
Ich würde es auch, je nach Laufzeit/Speichplatz Bedingungen über LUTs lösen. Wenn viel Platz ist, große LUTs, das spart Laufzeit.
SPI schrieb: > ich habe hier eine Anwendung wo ich im uC intern ein 16-Bit Datenwort > habe, Welcher uC denn genau? Denn die modernen Attiny bzw die XMegas könnten das mit eventsystem und CCL höchstwahrscheinlich in Hardware.
Yalu X. schrieb: > SPI schrieb: >> uC > > Dann geht das mit zwei einfachen Zuweisungen: Je nach uC und wie die interne Bus-Matrix zu den GPIOs aussieht, kann das auch mal in die Hose gehen und deutlich langsamer sein. Die Zugriffszeiten auf GPIOs sind teilweise sehr hoch.
M. H. schrieb: > Yalu X. schrieb: >> SPI schrieb: >>> uC >> >> Dann geht das mit zwei einfachen Zuweisungen: > > Je nach uC und wie die interne Bus-Matrix zu den GPIOs aussieht, kann > das auch mal in die Hose gehen und deutlich langsamer sein. Die > Zugriffszeiten auf GPIOs sind teilweise sehr hoch. Hast Du ein Beispiel für einen µC bei dem die Zeiten sehr hoch sind?
Kommt auf die CPU drauf an. Viele CPUs haben heutzutage Cryptographie Beschleuniger oder Befehlssätze hierfür. Ist das bei Dir der Fall, dann schau Dir mal die Galois multiplier an. Wenn Du eine Zahl mit sich selbst durch einen Galois Multiplier schickst, dann bekommst Du exakt das Ergebniss, welches Du brauchst.
Jens M. schrieb: > RubeGoldbergSemiconductors Die Audio-Sample A. S. schrieb: > Wieso eigentlich 16 Bit Eingang? SPI-Midule sind doch oft 8-bittig > organisiert, so dass 16er oder 256er Tabellen sehr effektiv sein > dürften. Das SPI Modul arbeitet nativ auf 32-Bit basis. Ich werde jetzt den Ansatz mit der LUT nehmen. Ram und Rechenleistung habe ich eh genügend, ist ein relativ dicker uC. Dann ein uint16_t Array mit 256 Einträgen.
Jason schrieb: > M. H. schrieb: >> Yalu X. schrieb: >>> SPI schrieb: >>>> uC >>> >>> Dann geht das mit zwei einfachen Zuweisungen: >> >> Je nach uC und wie die interne Bus-Matrix zu den GPIOs aussieht, kann >> das auch mal in die Hose gehen und deutlich langsamer sein. Die >> Zugriffszeiten auf GPIOs sind teilweise sehr hoch. > > Hast Du ein Beispiel für einen µC bei dem die Zeiten sehr hoch sind? War schon klar, dass da mal wieder nichts kommt. War also nur dummes Geschwätz.
Die alten LPC2000 beispielsweise waren bei GPIO nicht sonderlich schnell. Aber sowas kann man auch beim LUT-Verfahren erleben. Wenn man die Tables im ROM lässt, handelt man sich u.U. einige Waitstates ein.
Auf was für einen Prozessor soll das laufen? Look-up-Tables sind halt teilweise unschön weil man zuerst die Positon in der Tabelle berechnen muß und dann muß auch noch aus dem Speicher gelesen werden. Multiplikation mit 2 ist zum Glück auch auf einem billigst-Controller schnell gemacht (ein Bitshift nach links und fertig), aber eine moderne Desktop-CPU ist evtl. mit der ganzen Operation aus Bitshifts schneller fertig als wenn sie noch irgendwas aus dem Speicher laden muß. Vor allem wenn die Tabelle gerade nicht im Cache liegt.
Beitrag #6743592 wurde von einem Moderator gelöscht.
Ben B. schrieb: > Look-up-Tables sind halt teilweise unschön weil man zuerst die Positon > in der Tabelle berechnen muß und dann muß auch noch aus dem Speicher > gelesen werden. Vielleicht ein ein switch/case mit 16 Einträgen schneller
Sinnloses Stochern im Nebel, wenn man den konkreten Prozessor nicht kennt.
Ben B. schrieb: > die Positon in der Tabelle berechnen muß Was willst du da berechnen in diesem Fall? Genau in diesem Fall braucht man das nicht. Und deshalb ist es auch schnell wenn der LUT-Zugriff nicht aus den schon erwähnten Gründen alles kaputt macht.
SPI schrieb: > Ram und Rechenleistung habe ich eh genügend, ist ein relativ dicker uC. Gut zu wissen, dass es ein "relativ dicker uC" ist und Du den konkret nicht nennen willst. Dann können wir ja noch schön weiter die Glaskugel bemühen.
Ben B. schrieb: > Multiplikation mit 2 ist zum Glück auch auf einem > billigst-Controller schnell gemacht (+1) Es ist auch netter, wenn man schon eine funktionierende Programmvariante hat, als gewissermaßen schon mit Optimieren anzufangen, bevor irgendetwas läuft. Die sequentielle Herangehensweise ist recht naheliegend, wie jetzt genau (und ob überhaupt) hängt eben auch von der konkreten Hardware ab. SPI schrieb: > Wie kann man so etwas möglichst Effizient umsetzen (abgesehen von den > üblichen Bit-Shifting und Verknüpfungsmethoden)? ..also zeig mal ein Programm und erzähl was über die konkrete Hardware-Situation, und dann sehen wir weiter ;)
Frank M. schrieb: > SPI schrieb: >> Ram und Rechenleistung habe ich eh genügend, ist ein relativ dicker uC. > > Gut zu wissen, dass es ein "relativ dicker uC" ist und Du den konkret > nicht nennen willst. Dann können wir ja noch schön weiter die Glaskugel > bemühen. Ist die Aurix TC3xx Plattform
900ss D. schrieb: > Was willst du da berechnen in diesem Fall? Genau in diesem Fall braucht > man das nicht. Und deshalb ist es auch schnell wenn der LUT-Zugriff > nicht aus den schon erwähnten Gründen alles kaputt macht. Ich denke, er meinte daß der vom Compiler generierte Code ja aus der Anfangsadresse des Feldes und dem uint8_t als Index die Adresse der resultierenden uint16_t im Feld berechnen muß.
1 | erg16 = meineLUT[aktuelleuint8]; |
Das verbirgt ja die Berechnung meineLUT+aktuelleuint8 (glücklicherweise ist die Elementgröße 1, sonst wäre die Berechnung noch viel schlimmer).
SPI schrieb: > Ist die Aurix TC3xx Plattform TriCore hat ne eigene Instruktion für die gesuchte Operation (und die Umkehrung): BMERGE und BSPLIT.
> Was willst du da berechnen in diesem Fall? > Genau in diesem Fall braucht man das nicht. Nur weil Du das nicht brauchst, heißt das nicht, daß die CPU das nicht braucht. Sorry, aber typische Antwort von Fachidioten, die evtl. die weltbesten Programmierer sind, aber keine Ahnung mehr davon haben, wie das Ganze technisch-elementar funktioniert. Edit: Und denen das leider auch scheißegal ist. Jedenfalls solange der Compiler alle ihre Probleme löst.
Ben B. schrieb: > Nur weil Du das nicht brauchst, heißt das nicht, daß die CPU das nicht > braucht. Genau das ist der feine Unterschied. Ich(!) brauche für die Berechnung keinen extra Code schreiben. Das macht der Compiler für mich. Das eine Berechnung (verborgen) stattfindet, ist schon klar und auch dass die Laufzeit bedeutet. Das du genau diese Berechnung "im Hintergrund" gemeint hattest, war mir nicht klar. Ob du deshalb gleich persönlich wegen musst (Fachidiot) weiß ich nicht. Ich habe dich nur gefragt was du meinst. Ben B. schrieb: > weil man zuerst die Positon in der Tabelle berechnen "Weil man...." ja der Compiler nicht ich.
Ben B. schrieb: > Und denen das leider auch scheißegal ist. Vorurteile haben wir aber nicht, nein. :) Ich frage mich auch wie du darauf schließt.
wenn man das ganze in einer for schleife löst würde das ganze doch in einem Loop unrolling optimiert werden? Dann kann man sich auch den LUT sparen.
> Vorurteile haben wir aber nicht, nein. :) > Ich frage mich auch wie du darauf schließt. Beste Antwort: > Ich(!) brauche für die Berechnung keinen extra Code schreiben. > Das macht der Compiler für mich. [..] > "Weil man...." ja der Compiler nicht ich.
Klaus W. schrieb: > Ich denke, er meinte daß der vom Compiler generierte Code Ja, ich glaube auch dass er das meinte. Ich war irritiert seiner Frage wegen und deshalb fragte ich was er genau meint. Es ist selbstverständlich dass diese Berechnung zum Zugriff stattfinden muss. Bei mir macht das allerdings der Compiler, da brauch ich nichts rechnen ;) Eine Kröte muss man schlucken. Ich denke trotzdem, es ist die schnellste Methode trotz auch noch zusätzlichem Speicherzugriff auf die LUT.
900ss D. schrieb: > Ich denke trotzdem, es ist die schnellste > Methode trotz auch noch zusätzlichem Speicherzugriff auf die LUT. Schneller als der exakt die gewünschte Funktion bietende Prozessorbefehl?
Naja, die Instruktion bekommt man nicht per C wie vom TO gefragt, as bräuchte ein Inline Asm mit dem BMERGE.
Johann L. schrieb: > Naja, die Instruktion bekommt man nicht per C wie vom TO gefragt, as > bräuchte ein Inline Asm mit dem BMERGE. Oder eine Intrinsic-Funktion. Müsste man halt die Doku des Entwicklungssystems durchforsten.
(prx) A. K. schrieb: > Schneller als der exakt die gewünschte Funktion bietende > Prozessorbefehl? Nein, in dem Fall, wo die CPU einen entsprechenden Befehl hat wohl nicht. Aber ohne diesen würde ich darauf setzen. Vielleicht sollte man einen Wettbewerb machen. Der Funkenflug kann ja seine moderne CPU auch ins Rennen bringen. Da kommen sicher auch verschiedene Architekturen zusammen, was auch ganz interessant wäre, wie das dort umgesetzt wird.
Ben B. schrieb: > Im Gegensatz zu euch kann ich Assembler. Im Gegensatz zu Dir leiden "wir" nicht unter Größenwahn.
Angehängte Dateien:
-

bmerge.PNG
74 KB
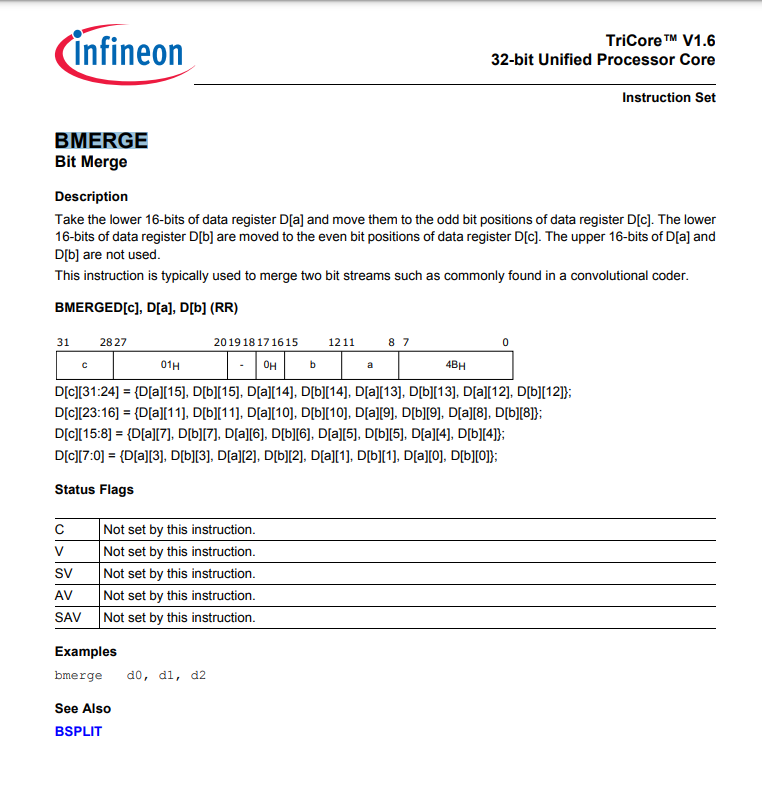
Johann L. schrieb: > SPI schrieb: >> Ist die Aurix TC3xx Plattform > > TriCore hat ne eigene Instruktion für die gesuchte Operation (und die > Umkehrung): BMERGE und BSPLIT. Dankeschön für diesen grandiosen Tipp! Ich habe grad mal in core-architecture manual nachgesehen, und ja es stimmt, dieser Befehl macht faktisch genau das, was ich suche :-)
SPI schrieb: > Quasi eine SPI die selber im Slave-Mode arbeitet und mit genau 6.144 MHz > getaktet wird, weil ich ein Stereo PDM-Mems Mikrofon-Signal samplen > will. > Die Mikrofone kriegen aber nur eine 3.072 MHz clock (diese pushen > jeweils aber auf steigende und fallende Flanke raus). Also muss ich die > SPI doppelt so schnell takten. > gleichzeitig will ich aus dem SPI Modul ein I2S Signal rausgeben, > welches seine Bits aber zu der 3.072 MHz clock referenziert haben soll. > Also pusht die SPI doppelt so viele Bits raus wie nötig. Wuerde es nicht einfacher die hardware anzupassen ? zB durch die frequenz durch uC halbieren zu lassen ? Patrick aus die Niederlaende
SPI schrieb: > Dankeschön für diesen grandiosen Tipp! Der ohne die Angabe Deines µCs gar nicht möglich gewesen wäre ;-)
Es ist schon erstaunlich was für spezielle Instruktionen teilweise in den Architekturen implementiert sind.
Jason schrieb: > Jason schrieb: >> M. H. schrieb: >>> Yalu X. schrieb: >>>> SPI schrieb: >>>>> uC >>>> >>>> Dann geht das mit zwei einfachen Zuweisungen: >>> >>> Je nach uC und wie die interne Bus-Matrix zu den GPIOs aussieht, kann >>> das auch mal in die Hose gehen und deutlich langsamer sein. Die >>> Zugriffszeiten auf GPIOs sind teilweise sehr hoch. >> >> Hast Du ein Beispiel für einen µC bei dem die Zeiten sehr hoch sind? > > War schon klar, dass da mal wieder nichts kommt. War also nur dummes > Geschwätz. Du bist ja ganz schlau. Hängt natürlich von der Definition von langsam ab. Bei STM32F4 sind bspw. die GPIO Zellen am hochgetakteten AHB Bus angehängt. Da ist ein Zugriff schon recht schnell. Trotzdem kann ein Pin Toggeln durch
1 | GPIO->ODR ^= (1<<x); |
dehr lange dauern im Vergleich zur Taktrate. Allein durch die vorangestellt Leseoperation des Registers. Bei 168 MHz Core-clock schafft mein F4 hier gerade mal 12 MHz Output Frequenz (Also 24 Millionen toggles pro Sekunde). je nachdem wie aufwändig es ist, die Operation intern auszufüheren, bist du hier aber noch relativ schnell. Die absolute Katastrophe sind Cortex-A basierte systeme. Bspw. Das Raspberry pi. Die CPU ist soviel schneller getaktet als die Bus Matrix der GPIOs, dass die oben genannte Operation in Software definitiv schneller ist. Ein AVR ist bspw sehr schnell mit seinen GPIOs. Da ist der GPIO single-Cycle angebunden. Da schafft man teils sogar schnellere IO Frequenzen als bei manchem ARM-basierten System, trotz geringerer Taktrate.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.