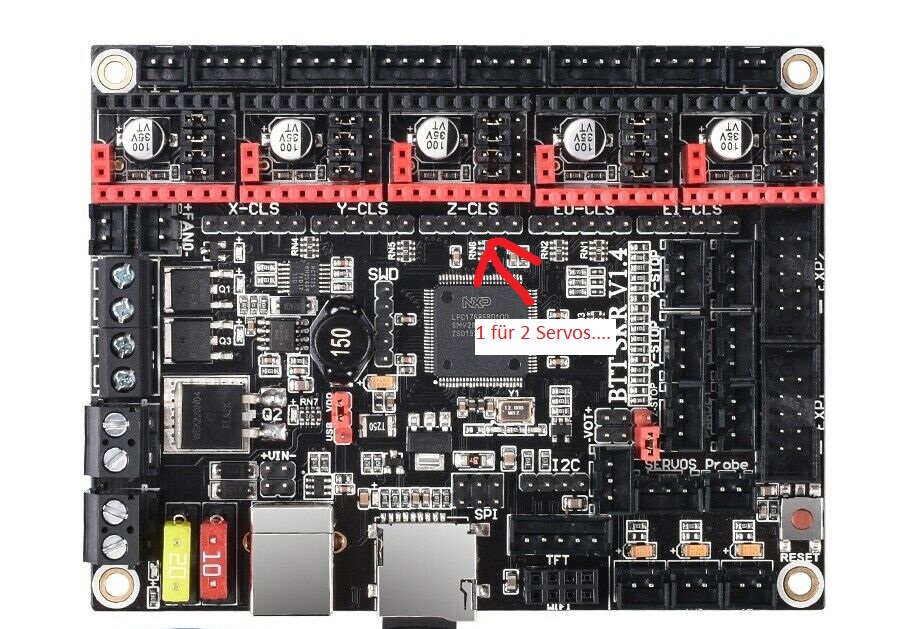
Hallo. Habe mir vor Längerem einem 3D-Drucker gebastelt, die So langsam Fertig wird. Nun habe ich noch ein einziges Problem. Das MB ist einem bigtreetech skr 1.4 Turbo. Die Servos sind Jmc iHSV57-30-10-36-01-T-33 100Watt. Alle Servos laufen im Einzel Betrieb ohne Problemen. Das MB Besitz jedoch für die Z Achse nur einem Anschluss (Bild Rot Markiert) Sobald ich beide Servos dort anschließe, Dreht der Linke Servo(Der Befindet sich Näher am MB) nur in eine Richtung, manchmal dreht er ein minimales Stück in die richtige Richtung und dann wieder unendlich in die falsche Richtung. Servos untereinander getauscht, kabeln erneuert etc etc nix zu machen. Dieses einem Servo will einfach nicht. Ich habe das Gefühl als ob der DIR Signal nicht ankommt, sobald der rechte Motor mit Dran gebunden wird?🤔 Liebe Grüße
Angehängte Dateien:
-

s-l1600.jpg
230 KB
Was für ein 3D-Drucker braucht denn bitte 2 100W Motoren mit so viel Moment und warum bitte Servos? Ist die Spannung überhaupt passend? Du scheinst die Stepper Treiber des Boards ja zu übergehen, der uC hat ziemlich sicher 3.3V die Servos vermutlich eher 5V oder sogar mehr. Mit zwei Servos schafft der uC vielleicht die Ausgänge nicht richtig zu treiben.
Kevin M. schrieb: > Ist die Spannung überhaupt passend? Du scheinst die Stepper Treiber des > Boards ja zu übergehen, der uC hat ziemlich sicher 3.3V die Servos > vermutlich eher 5V oder sogar mehr. Mit zwei Servos schafft der uC > vielleicht die Ausgänge nicht richtig zu treiben. Ist leider mal wieder so eine Chinaböller wo es anscheinend noch nicht mal eine vernüftiges Datenblatt vom Hersteller dazu gibt: - http://jmc-motor.com/product/953.html Wenn das hier Stimmen sollte: - https://webseite.sorotec.de/download/Technische-Daten/servomotoren/jmc/DS_iHSV57de_180702_Soro.pdf - Spannungen: 4,5 bis-24 V für DIR-HIGH, 0 - 0.5 V für DIR-LOW. - Spannungen: 4,5 bis 24 V, wenn PUL-HIGH, 0-0.5V, wenn PUL-LOW. Damit wäre des Bords mit 3,3V völlig ungeeignet. Auch wenn es im Moment mit einem Motor gerade noch so funktioniert ist das weit weg von einem Betriebssicherem zustand. Ein paar Grad mehr oder weniger in der Wohnung und schon kann es dir passieren das Pulse oder so verloren gehen. Kannst ja mal eine Oszi dranhängen und schauen. Vermutlich langen die paar Millivolt weniger, wenn zwei an dem Ausgang dran hängen schon ausreichen das endgültig nichts mehr funktioniert.
Ja die Servos haben 5v, und Das MB denke schon das der nur 3,3v hat. Allerdings scheint es an der Kabel Länger zu liegen, auf dem tisch 2 Servos an einem Anschluss Läuft, beide Kabeln Gleiche Länge. Am Drucker habe ich nun, Von MB Zum Linken Servo und Vom Linken Servo Zum Rechten Probiert, die Häufigkeit der Kurzzeitige richtige Dreh Richtung hat enorm Zu Genommen. Was mich wundert ist, das ich dachte Strom wäre Faul? Demnach müsste der am Nächste stehende besser laufen, also der mit dem Kürzerem Kabel? Der Kürzere hat doch ein Niedrigere Widerstand oder sehe ich das falsch? Die 100W sind Zugegeben Extrem, Da der Drucker jedoch Riemenlos läuft. Also Jede Achse ein Kugelumlaufspindel, Sind Stepper viel zu langsam. Kugelumlaufspindeln mit höherem Steigung, Sind extrem selten und von daher auch extrem Teuer. Außerdem Haben diese Servos weitere Vorteile. Wie Programmierbarem Kontroller/Driver. Abschaltung mit Alarm Ausgang, was man am MB legen kann um den Drucker zu stoppen, sollte ein Servo Wegen Überlastung ausfallen. Höhere Drehzahlen, sowie Beschleunigen und abbremsen nahe ohne Rampen. Und Viel viel Leiseren lauf.
Sorry wegen Doppelpost Habe das Problem aber Gefunden. Danke für den Datenblatt von den Servos. "Richtungs-Signal (Direction): : Im Puls-Richtungs-Modus ist dieser Eingang für die low / high Spannungsebenen, die zwei Richtungen des Motors. Für eine zuverlässige Reaktion sollte das DIR Signal mindestens 5 µs vor dem PUL Signal anliegen." Anscheinend Störte Der Zweite Motor Den Signal, so das Bei Einem erst Später ankam Das Erklärt wieso auf dem Tisch mit Gleiche Kabellänge Funktionierte. Eventuell Würden da Speerdioden Abhilfe schaffen? Nur wäre da die frage ob die Zenerdiode 3,3V 500mW DO35 / ZPD3,3V ok dafür wären? 🤔 Momentan habe ich das Kabel des Linken Servo Auf die Länge des Rechten Servo Angepasst, nicht grade die Schönste Lösung aber seit etwa 2 Std am Dauer laufen.
Irgend W. schrieb: > Wenn das hier Stimmen sollte: > - > https://webseite.sorotec.de/download/Technische-Daten/servomotoren/jmc/DS_iHSV57de_180702_Soro.pdf > > - Spannungen: 4,5 bis-24 V für DIR-HIGH, 0 - 0.5 V für DIR-LOW. > - Spannungen: 4,5 bis 24 V, wenn PUL-HIGH, 0-0.5V, wenn PUL-LOW. Und die 24V nur mit einem Vorwiderstand von 3-5kΩ. Der Strom ist mit typisch 10mA (7..16mA) angegeben. Das deutet sehr auf einen Ansteuerung über eine Optokoppler hin (IR-LED). Wieviel Strom kann das MB auf seinen Steuerausgängen liefern?
Sebastiano T. schrieb: > Was mich wundert ist, das ich dachte Strom wäre Faul? > Demnach müsste der am Nächste stehende besser laufen, also der mit dem > Kürzerem Kabel? > Der Kürzere hat doch ein Niedrigere Widerstand oder sehe ich das falsch? Nein, Strom teilt sich entsprechend des Ohmschen Gesetzes und der Kirchhoffschen Regeln auf. Im Fall deiner Steuersignale spielen die Innenwiderstände der Zuleitungen jedoch keine Rolle. Da wird schon beiden Motoren die gleiche Spannung ankommen. So etwas kann man mit einem Oszilloskop messen. Kaufe dir eins! Du hast eher wie gesagt das Problem, dass die Spannung vom Board und Motor nicht zusammen passen und dass dein Board eventuell überlastet wird, was zu einem Einbruch der Spannung führt.
Auf den Polulu Steckplätzen ist alles drauf was man benötigt um kleine Platinchen mit Pegelwandlern draufzustecken. Musst du dir halt zusammen basteln.
Ein Transistor und zwei Widerstände pro Signal könnten reichen, um beide Motortreiber anzusteuern, wenn man die Eingänge hintereinander schaltet.
Ja, das geht du könntest für das zweite Servo den PWM Pin vom bltouch nutzen, dann entsprechend im Marlin die Pin Def umprogrammieren. Und nein, das ist nicht der typische China Böller das Board ist ziemlich gut und beliebt. Ich habe meines mit TMC 2209 ausgerüstet sensorless über uart.
hello, als anmerkung: ich haben auch die JMC servos (180W) an meiner fraese laufen und problemslos einfach zwei parallel geschalten fuer die Y achse. das ganze an einem arduino board (5V) und estlcam. wichtig ist halt die pulslaenge einfach entsprechend gross zu waehlen. notfalls koenntest du mit einem BSS138 levelshifter oder schmitttriggers arbeiten. uebrigens vorsicht mit backemf bei den servos. wenn die zu schnell bremsen muessen gibt es ueberspannung und ggfs schalten die netzteile dadurch ab. ich verwende zwei 48V/10A fuer jeweils zwei, aber auf 42V runtergedreht (billige china dingers) gruss, —randy Sebastiano T. schrieb: > Sorry wegen Doppelpost Habe das Problem aber Gefunden. > Danke für den Datenblatt von den Servos. > "Richtungs-Signal (Direction): : Im Puls-Richtungs-Modus ist dieser > Eingang für die low / high Spannungsebenen, die zwei Richtungen des > Motors. Für eine zuverlässige Reaktion sollte das DIR Signal mindestens > 5 µs vor dem PUL Signal anliegen." > Anscheinend Störte Der Zweite Motor Den Signal, so das Bei Einem erst > Später ankam Das Erklärt wieso auf dem Tisch mit Gleiche Kabellänge > Funktionierte. > Eventuell Würden da Speerdioden Abhilfe schaffen? > Nur wäre da die frage ob die Zenerdiode 3,3V 500mW DO35 / ZPD3,3V ok > dafür wären? 🤔 > Momentan habe ich das Kabel des Linken Servo Auf die Länge des Rechten > Servo Angepasst, nicht grade die Schönste Lösung aber seit etwa 2 Std am > Dauer laufen.
Hallo und Vielen dank für die viele Antworten. >"Wieviel Strom kann das MB auf seinen Steuerausgängen liefern?" Ich habe dazu leider nix Gefunden. >"Nein, Strom teilt sich entsprechend des Ohmschen Gesetzes und der >Kirchhoffschen Regeln auf. >Im Fall deiner Steuersignale spielen die Innenwiderstände der >Zuleitungen jedoch keine Rolle. Da wird schon beiden Motoren die gleiche >Spannung ankommen. So etwas kann man mit einem Oszilloskop messen. Kaufe >dir eins!" Das Werde ich tun den es interessiert mich warum die Kabellänge so viel ausmacht. Ich Vermute das Die Driver sich Gegenseitig Stören. Den Der Test Lief jetzt die Ganze Nacht Bei Gleicher Kabel Länge. Beispiel 1 Vom MB zur Linken Servo (Kurze Kabel) + Vom MB zur Rechten Servo (Langer Kabel) Linke Servo Paar ruckler in die Richtige Richtung, sonst nur noch Falschrum, Rechte Servo Läuft IMMER Richtig. Bespiel 2 Vom MB Zum Linken Servo (Kurze Kabel) Von dort aus Zum Rechten Servo (Langes Kabel) Linke Servo Lief ca.. 1 Minute Richtig Rum, danach kleine Aussetzer bis es nur noch falsch Rum Lief, Rechter Servo Ohne Probleme. Beispiel 3 Vom MB Jeweils ein Kabel Mit der Gleiche Länge Beide Servos Laufen seit Ü10 Std Richtig 🧐 Ich Schätze aber das der Kontroller das Wohl auf langer Sicht nicht lange Mit machen wird. Von Daher Werde ich mir. A Einem oszi Kaufen, B Werde ich Wohl die Transistor Lösung Einbauen. Sowas in der Art Könnte Abhilfe schaffen denke ich? https://de.banggood.com/5PCS-MKS-CD-57-or-86-Stepper-Motor-Driver-Current-Expansion-Board-For-3D-Printer-p-1169692.html?utm_source=googleshopping&utm_medium=cpc_organic&gmcCountry=DE&utm_content=minha&utm_campaign=minha-deg-de-pc¤cy=EUR&cur_warehouse=CN&createTmp=1&utm_source=googleshopping&utm_medium=cpc_bgcs&utm_content=sxxx&utm_campaign=sxxx-ssc-deg-all-1209&ad_id=485154805627&gclid=CjwKCAjw092IBhAwEiwAxR1lRuWLAcK_aenTGOxgDOME1ilBC-E6kbbtMujYj36aSINHhGDYGq6bERoCuA0QAvD_BwE
Sebastiano T. schrieb: > Sowas in der Art Könnte Abhilfe schaffen denke ich? Statt rumzurätseln und über Leitungslängen von einigen Dezimetern zu philosophieren, ist es vielleicht zielführender, mal in den Schalplan zu gucken, um das Problem zu verstehen. https://github.com/bigtreetech/BIGTREETECH-SKR-V1.3/tree/master/BTT%20SKR%20V1.4?spm=a2g0o.detail.1000023.17.64784c7fuSm1Ba&file=BTT%20SKR%20V1.4
An Dem Schaltplan Sehe ich Überhaupt nix, da Steht nirgends wieviel der Ausgang ausgibt. Abgesehen davon war die Frage ob die Oben Gelinkten Teile, Abhilfe schaffen könnten. Denn diese Würden an der stelle des integrierten Treiber kommen, und ich könnte somit 2 Stk für die Z Achse Verwenden, also jedes Servo Jeweils 1. Wenn ich es Richtig Verstanden habe, können diese von 10mA auf 100mA Verstärken? Selbst wenn es weniger sein Sollte, könnte das ja ok Sein, immerhin hat jedes Servo Sein Eigenes denke ich. ZITAT: >In aktuellen 42 Motor-Treiber von 3D-Drucker auf dem Markt ist, >dass die direkte primäre IC-Anschluss an Motor-Treiber-IC, >wird der Strom von jeder Schnittstelle verbraucht wird nicht mehr als 2MA. >Das MKS Gen Motherboard, das wir entwerfen, >hat einen Signalanschluss, >der das Signal vom Motortreiber ausgeben kann. >Wir empfehlen die Verwendung von 4988, 8825 usw. Motorfahrer. >Im Allgemeinen, was 57/86 Stepper-Treiber-Eingänge, >ist die optische Kopplung Isolation, >vor allem gegen Interferenzen zu verhindern. >Jeder Motorfahrer hat 3 Eingänge. >EN aktiviert Port steuert Motorschalter. >PUL-Puls-Port steuert die Bewegung der Motorposition oder -Geschwindigkeit, >die DIR-Richtungsschnittstelle steuert die Bewegungsrichtung des Motors. >Der Treiberstrom der allgemeinen optischen Kopplungsschnittstellen beträgt etwa 10MA, >ein Fahrer betätigt einen Motor. >Ohne Treiber verbraucht die meisten von 30MA Steuerstrom, nach X, Y, Z, E >verbinden mit vier allgemeinen 57/86 Motortreiber, >die 100MA Strom bei der Arbeit benötigen. >Es ist einfach, >die 3Dprinter IC-Steuerplatine zu brennen, >wenn die Verbindung direkt aufgebaut wird, >aber nicht den Strom zu vergrößern.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.