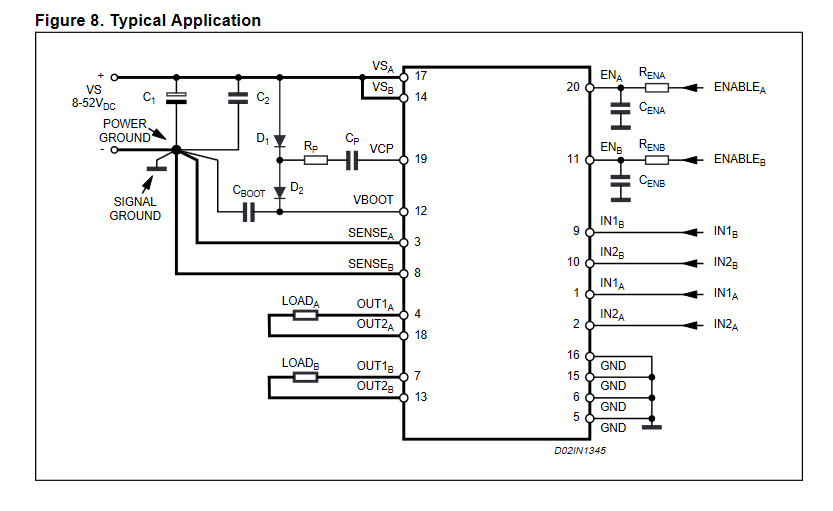
Hi, ich würde gerne eine Motorsteuerung mit einem STM32 F446RE board realisieren. Das board soll zwei Motoren per PWM steuern. Steuern möchte ich zwei Motoren des Typs: https://www.conrad.de/de/p/motraxx-sr390shp-64-5-flugmodell-brushed-elektromotor-17292-u-min-229025.html Nach Spezifikationen hätte ich gesagt, dass folgender Voll-Brückentreiber passen würde: https://www.reichelt.de/dualer-voll-brueckentreiber-8--52-v-2-8-a-100-khz-dil-20-l-6205-n-p111959.html Da ich mich jedoch in der Elektrotechnik nicht so sehr auskenne, weiß ich nicht ob der L6205N wirklich für die Motoren ausreichend ist? Weiterhin würde ich den angehängten Schaltplan des Treibers gerne verstehen. So wie ich den Plan verstehe muss ich je einen PIN des STM32 in ENABLE A und B verbinden. Hier brauche ich dann noch einen Widerstand und einen Kondensator. Wozu brauche ich die beiden? Dann verstehe ich den kompletten Pfad der Stromversorgung nicht. Was brauche ich da alles um den Treiber korrekt anzuschließen? Muss ich VCP und VBOOT bedienen um den Treiber korrekt zu benutzen? Kann ich die PINs 5 6 15 und 16 mit dem Ground vom STM32 verbinden? Um die Motoren dann per PWM zu steuern muss ich, wenn ich den Treiber richtig verstehe, um in die eine Richtung zu drehen an IN2 Low anlegen, und ein PWM signal an IN1, für die andere Richtung IN1 Low und IN2 PWM. Richtig? Für Antworten bin ich sehr dankbar.
Angehängte Dateien:
-

Screenshot__3_.png
34 KB
Hi, du musst dir Fig. 5+6 anschauen. Dein Enable wird nämlich von Überlast und Übertemperatur "übersteuert". Die Zeitkonstante dieser RC-Kombi ist für die Frequenz maßgebend mit der der Enable-Eingang aus- und wieder eingeschaltet wird. Ist im hörbaren Bereich... Mit den IN-Eingängen legst du die Betriebsart fest. -Ausg. offen (Trudel-Stop) -Linkslauf -Rechtslauf -Schnellstop (Ausg. kurzgeschlossen) Viele Grüße Runout
oops vergessen... Klar brauchst du die komplette Außenbeschaltung. (Charge Pump Circuit) Es gibt für den L6206 und L6205 noch eine extra App-Note die fürs Design hilfreich ist. AN1762 - ohne Garantie
Christof P. schrieb: > Um die Motoren dann per PWM zu steuern muss ich, wenn ich den Treiber > richtig verstehe, um in die eine Richtung zu drehen an IN2 Low anlegen, > und ein PWM signal an IN1, für die andere Richtung IN1 Low und IN2 PWM. > Richtig? So ist es richtig. Thomas T. schrieb: > Mit den IN-Eingängen legst du die Betriebsart fest. Und so falsch. Enable Eingänge werden dazu verwendet, den Motor stromlos zu schalten. Auf keinen Fall wird hier PWM angelegt. Der L6205 im DIL20 wird Dir nicht gefallen. Schon mit einem Motor, kann er je nach Last zu warm werden. Kühlung ist schlecht möglich. Besser wäre pro Motor ein L6203 im Multiwatt11 Gehäuse. Aber auch dieser sollte besser mit >= 12 V betrieben werden, was nicht so recht zum Motor passt. Die Motoren sollten nur mit PWM-Rampe beschleunigt werden, damit der Treiber nicht überlastet wird. Der Anlauf-/Bremsstrom ist immer ein Vielfaches des Betriebsstromes. Hast Du ggf. einen anderen Motor mit höherer Betriebsspannung zur Auswahl? Bei 24 V Motoren sinken die Ströme und die Verlustleistungen der Treiber.
Öhm vermutlich könnte ich auch diesen Motor hier nehmen: https://www.conrad.de/de/p/igarashi-2738-051-gc-5-universal-brushed-elektromotor-14800-u-min-244520.html Die beiden Motoren sollten von der Leistung her ja recht ähnlich sein, oder?
Christof P. schrieb: > Dann verstehe ich den kompletten Pfad der Stromversorgung nicht. Was > brauche ich da alles um den Treiber korrekt anzuschließen? Das ist ganz einfach: "Wenn ich nicht mehr weiter kann, schließ` ich Plus an Minus an Wie baust du die Schaltung denn auf? Lochraster, Breadboard, eigenes PCB? Auf saubere Masseführung achten und ruhig ein paar Entstörkondensatoren für die bürstenbehafteten Motoren spendieren!
m.n. schrieb: > Aber auch dieser sollte besser mit >= 12 V betrieben werden, was nicht > so recht zum Motor passt Kommt drauf an. Man kann Sensorwiderstände dranmachen und eine Stromregelung/Stromchopper machen. Dann hat der Motor auch ordentlich Anlaufmoment.
Vielleicht sollte der TO noch ein paar Infos spendieren, ob eine hohe Lautstärke überhaupt stört oder aus welcher Quelle er die Motoren speist? Vielleicht ist der Maximalstrom hier schon begrenzt.
Hi, electrician schrieb: > Vielleicht sollte der TO noch ein paar Infos spendieren, ob eine > hohe Lautstärke überhaupt stört oder aus welcher Quelle er die Motoren > speist? Vielleicht ist der Maximalstrom hier schon begrenzt. Gerne. Die Motoren sollen ein Hovercraft vorwärts (und rückwärts) bewegen. Daher hätte ich die Stromversorgung mit Batterien realisiert. Maximalstrom ist also schon relativ begrenzt, da das Gewicht der ganzen Sachen nicht so schwer werden darf, als dass das Luftkissen in die Knie geht. Hohe Lautstärke dürfte hier auch nicht sehr stören, wenns nicht allzu laut wird :) electrician schrieb: > Christof P. schrieb: > >> Dann verstehe ich den kompletten Pfad der Stromversorgung nicht. Was >> brauche ich da alles um den Treiber korrekt anzuschließen? > > Das ist ganz einfach: > "Wenn ich nicht mehr weiter kann, schließ` ich Plus an Minus an > Wie baust du die Schaltung denn auf? > Lochraster, Breadboard, eigenes PCB? > Auf saubere Masseführung achten und ruhig ein paar Entstörkondensatoren > für die bürstenbehafteten Motoren spendieren! Also den Anschluss sollte ich hinbekommen (vermutlich), ich verstehe nur nicht wofür die die Kondensatoren usw brauche. Da fehlt mir das Hintergrundwissen. Wo müsste ich die Entstörkondensatoren denn anbringen?
Christof P. schrieb: > Daher hätte ich die Stromversorgung mit Batterien realisiert. Aha. Knopfzellen? 3s, 4s, 6s LiPos? 12V Bleiakkumulator aus dem KFZ? Immer diese Salamitaktik hier....
electrician schrieb: > Christof P. schrieb: > >> Daher hätte ich die Stromversorgung mit Batterien realisiert. > > Aha. Knopfzellen? 3s, 4s, 6s LiPos? 12V Bleiakkumulator aus dem KFZ? > Immer diese Salamitaktik hier.... Ist keine Salamitaktik, ich weiß es nur nicht besser. Momentan werden AA Alkaline Batterien benutzt. 2x4 AA Batterien um die Motoren des Luftkissens zu betreiben, und (momentan, das will ich ja aber durch eine steuerung ersetzen) bestromen 8 AA Alkaline Batterien einen Graupner Speed 280. Daher bin ich auch hier für Vorschläge offen, wie ich die Stromversorgung besser hinbekomme.
Als erstes solltest Du sicherstellen, dass sich keine Aale im Luftkissenboot befinden. Eine Strom-Chopper-Regelung, wie ich oben vorgeschlagen habe, hat in Deinem Anwendungsfall wohl keine Vorteile. (Sie wäre vorteilhaft gewesen, wenn die Gefahr bestünde, dass der Motor blockiert. Aber das Problem gibt es bei einem Luftkissenboot wohl nicht.) Da ist eine normale PWM wohl sinnvoller. Aber: Warum nimmst Du nicht irgendeinen normalen Modellbau-Fahrtregler? Wenn der Motor schon von Graupner ist, werden die doch wohl auch schon den passenden Fahrtregler im Programm haben?
Ein Luftkissen gehört nicht zu meinen bevorzugten Fahrzeugen. Müssen die Motoren überhaupt rückwärts laufen? Ein Bremsen der Motoren ist wohl auch nicht nötig. Dann könnte der Treiber auch einfacher aufgebaut sein. Christof P. schrieb: > Die beiden Motoren sollten von der Leistung her ja recht ähnlich sein, > oder? Die Auswahl der Motore kannst nur Du vornehmen: Leistung, Drehzahl, Abmessungen, Gewicht.
Walter T. schrieb: > Als erstes solltest Du sicherstellen, dass sich keine Aale im > Luftkissenboot befinden. > Eine Strom-Chopper-Regelung, wie ich oben vorgeschlagen habe, hat in > Deinem Anwendungsfall wohl keine Vorteile. (Sie wäre vorteilhaft > gewesen, wenn die Gefahr bestünde, dass der Motor blockiert. Aber das > Problem gibt es bei einem Luftkissenboot wohl nicht.) Da ist eine > normale PWM wohl sinnvoller. > Aber: Warum nimmst Du nicht irgendeinen normalen Modellbau-Fahrtregler? > Wenn der Motor schon von Graupner ist, werden die doch wohl auch schon > den passenden Fahrtregler im Programm haben? Weil ich von Graupner im Internet absolut nichts mehr finde. Weder eine Beschreibung, was der Motor wirklich kann, noch ähnliches wie einen Fahrtregler. m.n. schrieb: > Ein Luftkissen gehört nicht zu meinen bevorzugten Fahrzeugen. > Müssen die Motoren überhaupt rückwärts laufen? > Ein Bremsen der Motoren ist wohl auch nicht nötig. Dann könnte der > Treiber auch einfacher aufgebaut sein. > Christof P. schrieb: > >> Die beiden Motoren sollten von der Leistung her ja recht ähnlich sein, >> oder? > > Die Auswahl der Motore kannst nur Du vornehmen: Leistung, Drehzahl, > Abmessungen, Gewicht. Da ich ersteren Motor in Anlehnung an das was ich überhaupt vom Graupner gefunden habe, ausgesucht habe, sollten beide Motoren (Motraxx und Igarashi) für mich passen. Wenn es einfacher ist, die Motoren nur in eine Richtung laufen zu lassen, gerne auch das.
Christof P. schrieb: > Weil ich von Graupner im Internet absolut nichts mehr finde. Graupner scheint tatsächlich mittlerweile out zu sein. Aber unter dem Suchbegriff "brushed Fahrtregler" scheint das Programm recht umfangreich. Beim Fahrtregler solltest Du darauf achten, dass die Versorgungsspannung und der Bemessungsstrom jeweils höher als das sind, was die Motoren brauchen. Ruhig auch ein ganzes Stückchen mehr - insbesondere der Strom. Einen Motor mit 7V Nennspannung kannst Du auch problemlos aus einem 24V-Akku-Pack über den Fahrtregler versorgen, wenn dieser ebenfalls die 24V aushält. Die Begrenzung hast Du ja mit der Pulsbreite selbst im Griff. Hast Du die Chance, den Kurzschlußstrom Deines Motors zu messen? Und vielleicht hätte ich das zuerst fragen sollen: Willst Du ein Luftkissenboot bauen, oder legst Du darauf Wert, den Fahrtregler/Motortreiber auch selbst zu bauen?
Walter T. schrieb: > Christof P. schrieb: > >> Weil ich von Graupner im Internet absolut nichts mehr finde. > > Graupner scheint tatsächlich mittlerweile out zu sein. Aber unter dem > Suchbegriff "brushed Fahrtregler" scheint das Programm recht > umfangreich. Beim Fahrtregler solltest Du darauf achten, dass die > Versorgungsspannung und der Bemessungsstrom jeweils höher als das sind, > was die Motoren brauchen. Ruhig auch ein ganzes Stückchen mehr - > insbesondere der Strom. Einen Motor mit 7V Nennspannung kannst Du auch > problemlos aus einem 24V-Akku-Pack über den Fahrtregler versorgen, wenn > dieser ebenfalls die 24V aushält. Die Begrenzung hast Du ja mit der > Pulsbreite selbst im Griff. > Hast Du die Chance, den Kurzschlußstrom Deines Motors zu messen? > Und vielleicht hätte ich das zuerst fragen sollen: Willst Du ein > Luftkissenboot bauen, oder legst Du darauf Wert, den > Fahrtregler/Motortreiber auch selbst zu bauen? Ich würde gerne soviel es geht "selber" machen. Also eher einen Motortreiber nehmen. Das Luftkissenboot existiert schon, ich möchte es jetzt nur per App (via STM32) steuerbar machen
Walter T. schrieb: > Als erstes solltest Du sicherstellen, dass sich keine Aale im > Luftkissenboot befinden. Das heißt beim Vorhandensein von Zitteraalen würde sich dann ein Strom-Chopper wieder anbieten? Zurück zum Thema: Warum sollen bei einem Luftkissenboot "die Motoren" nicht rückwärts laufen können? Das trifft vielleicht auf den Motor zu, der das Luftkissen aufbläst, aber es gibt ja sicherlich noch mind. 2 Motoren, die für Vortrieb Richtungsänderung Verzögerung zuständig sind.
electrician schrieb: > Walter T. schrieb: > >> Als erstes solltest Du sicherstellen, dass sich keine Aale im >> Luftkissenboot befinden. > > Das heißt beim Vorhandensein von Zitteraalen würde sich dann ein > Strom-Chopper wieder anbieten? > Zurück zum Thema: > Warum sollen bei einem Luftkissenboot "die Motoren" nicht rückwärts > laufen können? Das trifft vielleicht auf den Motor zu, der das > Luftkissen aufbläst, aber es gibt ja sicherlich noch mind. 2 Motoren, > die für Vortrieb Richtungsänderung Verzögerung zuständig sind. Und um die beiden Motoren geht es. Die Motoren zum aufblasen des Luftkissens werde ich nur ein/ausschalten (realisiert über Mosfet mit freilaufdiode). Im Rückwärtslauf werden sie aber nicht soviel Trieb entwickeln können, wenn auf den Motoren eine Luftschraube kommt, oder?
Christof P. schrieb: > wenn auf den Motoren eine Luftschraube kommt So ein Ferkelchen, diese Luftschraube Mach es wie von n.m vorgeschlagen: Beschleunigung über PWM Rampe, vielleicht noch einen Kühlkörper auf das DIP Gehäuse kleben und erstmal das Ding ans Laufen bekommen. Wenn es hält: gut Wenn der Treiber abraucht: Kannst du immernoch nen anderen verbauen und einige Erfahrungspunkte verbuchen :)
Christof P. schrieb: > Ich würde gerne soviel es geht "selber" machen. Mit "L6203" ist ja schon ein brauchbarer Klassiker in die Runde geworfen worden. Wenn ich versucht habe, Alltags-Kleinleistungs-Leistungselektronik selbst zu machen, ist es allerdings irgendwie immer*) teurer und langwieriger geworden, als fertige Module zu verbauen. Ich will Dir aber den Spaß an Deinem Vorhaben nicht nehmen, deswegen beschränke ich mich ab hier aufs stille Mitlesen und wünsche Dir viel Erfolg bei Deinem Vorhaben! *) in den letzten 10 Jahren
electrician schrieb: > Wenn der Treiber abraucht: Kannst du immernoch nen anderen verbauen und > einige Erfahrungspunkte verbuchen :) Dafür ist das Teil einen Tick zu teuer. Christof P. schrieb: > Das Luftkissenboot existiert schon, Dann bau einen Motor ein und miss, welche Ströme bei welcher Spannung benötigt werden. Das ist sehr wichtig. Beispiel: der Motor zieht die für den L6205 zulässigen 2,8 A und wird intern auf 125 °C aufgeheizt, dann hat die Brücke einen Einschaltwiderstand von max. 1 Ohm. I² x R sind dann ca. 7,8 W Verlustleistung im Treiber. Für ein DIL20-Gehäuse ist das zu viel. Bei 1 A Nutzstrom liegt die Verlustleistung bei 1 W. Da ist die Situation deutlich entspannter, den Treiber gekühlt zu bekommen. Daher erst messen und dann entscheiden.
m.n. schrieb: > Dann bau einen Motor ein und miss, welche Ströme bei welcher Spannung > benötigt werden. Das ist sehr wichtig. > Beispiel: der Motor zieht die für den L6205 zulässigen 2,8 A und wird > intern auf 125 °C aufgeheizt, dann hat die Brücke einen > Einschaltwiderstand von max. 1 Ohm. I² x R sind dann ca. 7,8 W > Verlustleistung im Treiber. > Für ein DIL20-Gehäuse ist das zu viel. > Bei 1 A Nutzstrom liegt die Verlustleistung bei 1 W. Da ist die > Situation deutlich entspannter, den Treiber gekühlt zu bekommen. > Daher erst messen und dann entscheiden. Ich würde ungerne mehrfach bestellen um die Versandkosten gering zu halten :) daher würde ich den motor ja auch so aussuchen dass er für den treiber passt. Oder umgekehrt. Der Igarashi hat eine Durchschnittsstromaufnahme von 1.6A. Müsste das nicht für so eine Rechnung reichen?
Christof P. schrieb: > Der Igarashi hat eine > Durchschnittsstromaufnahme von 1.6A. Müsste das nicht für so eine > Rechnung reichen? Der Halbleiter muß auf den Kurzschlußstrom dimensioniert werden. Christof P. schrieb: > Ich würde ungerne mehrfach bestellen um die Versandkosten gering zu > halten Wenn man Hardware entwickelt, bleibt ein erklecklicher Anteil der Entwicklungskosten bei UPS, DHL & Co. Man kann versuchen, das zu vermeiden, in dem man auf Verdacht mehr bestellt, aber das führt hauptsächlich dazu, dass das Lager doch-nicht-benötigter Komponenten wächst. :-)
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.