Hallo, ich möchte nicht mit Lidar etwas erkennen, sondern ich möchte erkennen können, dass ich mich im Erfassungsbereich eines Lidars befinde. Das ganze soll nicht nur im Dunklen, sondern möglichst auch bei Tageslicht funktionieren. Es soll möglichst ein digitales Signal anliegen, also im Erfassungsbereich eines Lidars ja oder nein. Das Lidarsignal selbst scheint sehr schwach zu sein, zumindest für eine herkömmliche IR Kamera. Als Beispiel mal das IR Bild eines Roborock Staubsaugers. Unten sieht man die IR-Reflektion der Absturzsensoren am Fußboden. Etwas darüber den seitlichen Abstandssensor und oben drüber der blinkende Lidarpunkt, da sich das Lidar dreht. Das schwächere Licht links davon ist die Stütze des Lidarturms an dem sich das Licht streut. Wäre das Lidar stationär, also sich nicht drehend, wäre es im Vergleich zu den Absturzsensoren wohl immer noch sehr schwach. Die Aufnahme entstand in einem Raum in den Abendstunden, dementsprechend finster ist es. Update: Die LIDAR-Erkennung-Detektion soll auch funktionieren, wenn das Lidar selbst stationär ist und nicht rotiert. Je einfacher desto besser: Willkommen sind auch fertige Module zur Erkennung, sofern soetwas existiert.
Angehängte Dateien:
-

Roborock.gif
2 MB
Hans W. schrieb: > sondern ich möchte erkennen > können, dass ich mich im Erfassungsbereich eines Lidars befinde. Dann musst Du Deine Kamera auch auf Ebene des Lidar-Laserstrahls positionieren :-) - dann wirst Du das sehr gut bemerken (vermutlich in Höhe des Lidar-Scanners auf dem Saugroboter).
Die Kamera war nur ein Beispiel. Ich brauche ein digitales Signal Lidard ja/nein.
Hans W. schrieb: > Die Kamera war nur ein Beispiel. Ich brauche ein digitales Signal Lidard > ja/nein. Trotzdem muss du in den Strahl gucken, wenn du ihn sehen willst oder du musst dich (und den auf dir diffus reflektierten Strahl) angucken.
Hans W. schrieb: > Die Kamera war nur ein Beispiel. Ich brauche ein digitales Signal Lidard > ja/nein. Du weißt schon, dass ein Laserstrahl geradeaus geht und dort wo er auftrifft i.d.R. Punktförmig ist? Du kannst natürlich eine Reihe von Liniensensoren versetzt übereinander packen - aber das wird ein wenig Aufwand erfordern ... . Möglich wäre natürlich auch eine optische Lösung mit einem Sammellinsenabschnitt - aber das ist nicht weniger aufwändig.
Eine sehr interessante Frage! Wenn das Lidar mit einem Laser und gepulst arbeitet, kannst Du es auf zwei Arten detektieren: einen schmalbandigen Filter für die Wellenlänge des Lidars (die muss natürlich bekannt sein!) und danach eine Detektion per Photodiode, ob sich plötzliche Pulse zeigen (direkt in Software oder analog). Das ist natürlich so mäßig sensitiv. Wenn Du es genauer testen willst, kannst Du den zweiten Weg wählen, und zwar, einen SiPM zu verwenden und ultraschnell zu messen. Dann siehst Du die Laserpulse direkt sehen. Die Auswertelektronik ist in diesem Fall relativ komplex, da die Eigenschaft des Lidars ja ist, eine hohe Pulsleistung mit winziger mittlerer Leistung zu kombinieren. Letzteres macht die Detektion über andere Methoden halt schwer.
Skimpy schrieb: > da die Eigenschaft des Lidars ja ist, eine > hohe Pulsleistung mit winziger mittlerer Leistung zu kombinieren Gibt es dazu eine Quelle in Bezug auf Staubsaugerroboter (nicht Atmosphärenmessungen)? Wäre mir neu ...
Die Quelle ist der Sticker zur Laserklasse der auf dem Teil klebt. Garantiert eine sehr niedrige.
Hans W. schrieb: > Update: Die LIDAR-Erkennung-Detektion soll auch funktionieren, wenn das > Lidar selbst stationär ist und nicht rotiert. Schade, weil die Rotationsfrequenz zu detektieren, dürfte die leichteste Erkennungsmethode sein. Und: Nur weil du das Lidar erkannt hast, weißt du noch lange nicht, wie empfindlich der Empfänger am Roborock ist..
Hugo H. schrieb: > Hans W. schrieb: >> Die Kamera war nur ein Beispiel. Ich brauche ein digitales Signal Lidard >> ja/nein. > > Du weißt schon, dass ein Laserstrahl geradeaus geht und dort wo er > auftrifft i.d.R. Punktförmig ist? Du kannst natürlich eine Reihe von > Liniensensoren versetzt übereinander packen - aber das wird ein wenig > Aufwand erfordern ... . Möglich wäre natürlich auch eine optische Lösung > mit einem Sammellinsenabschnitt - aber das ist nicht weniger aufwändig. Das Lidar des Roborock spannt sich wahrscheinlich tatsächlich nur in einer Ebene auf. Kommerzielle Lidars wie von selbstfahrenden Autos scannen jedoch die Umgebung in 3D, d.h. für einen winzigen Sekundenbruchteil ist das Lidar genau auf die Kamera gerichtet. > Gibt es dazu eine Quelle in Bezug auf Staubsaugerroboter (nicht > Atmosphärenmessungen)? Wäre mir neu ... Da gibt es einige, z.B. Matubrücken arbeiten nach diesem Prinzip. Kommerzielle Radarwarner bzw. dessen Lasererkennung schlägt bei Mautbrücken an. Allerdings senden die auch mehrere starke IR-Blitze aus. Eventuell reagiert das Gerät auch darauf. > Schade, weil die Rotationsfrequenz zu detektieren, dürfte die leichteste > Erkennungsmethode sein. Bei jedem Lidar müsste sich der Laser doch in einer bestimmten Frequenz "bewegen". Kommerziell ist z.B. hier https://www.aliexpress.com/item/1005001524534305.html ein Lidargerät erhältlich. Das Werbevideo ist sehr sehenswert und zeigt die "Auffächerung" des Laserstrahls an. Bei 1000 Hz "Framerate" müsste man doch ein sehr schwaches 1 kHz Signal detektieren können. > Wenn Du es genauer testen willst, kannst Du den zweiten Weg > wählen, und zwar, einen SiPM zu verwenden und ultraschnell zu messen. > Dann siehst Du die Laserpulse direkt sehen. Die Auswertelektronik ist in > diesem Fall relativ komplex, da die Eigenschaft des Lidars ja ist, eine > hohe Pulsleistung mit winziger mittlerer Leistung zu kombinieren. Gibt es irgendwas kommerziell in die Richtung was man verwenden kann ohne die Schaltung von Grund auf neuzubauen? Ideal wäre auch, wenn man irgendwie einen Arduino/ESP/Raspberry PI als Auswertelektronik hernehmen könnte.
Hans W. schrieb: > d.h. für einen winzigen > Sekundenbruchteil ist das Lidar genau auf die Kamera gerichtet. Jein, eher ist es wahrscheinlich das der Strahl schräg auf die Linse/Sensor deiner Kamera trifft und somit je nach Strahlengang nicht sicher ist das du ihn sauber erkenne kannst. Für die Gegenseite reicht dagegen die Reflektion von deinem Kameragehäuse schon aus:-)
Es wird sich mit ziemlicher Sicherheit um etwas vergleichbares handeln: https://cdn-shop.adafruit.com/product-files/4010/4010_datasheet.pdf Ein Automotive-Sensor (Punktewolke) wäre viel zu teuer und macht auch - aus meiner Sicht - keinen Sinn. Dieser hier wird scheinbar gepulst betrieben (vermutlich wegen des Umgebungslichts) und damit Hugo H. schrieb: > Skimpy schrieb: >> da die Eigenschaft des Lidars ja ist, eine >> hohe Pulsleistung mit winziger mittlerer Leistung zu kombinieren hat Skimpy Recht.
Fuer eine moeglichst einfach zu bauende Loesung wuerde ich versuchen, eine Webcam mit schmalbandigem Filter davor hinzustellen und dann ein bisschen Bildverarbeitung in Software machen.
Hans W. schrieb: > Das Lidarsignal selbst scheint sehr schwach zu sein, zumindest für eine > herkömmliche IR Kamera. Dann hast du die falsche Kamera. Der Laser von diesen Robotern hat schon so viel power, daß ich da nur ungern mit dem Auge reinschauen würde. Die "Reichweite" des Lidars ergibt sich da nicht durch die Sichtbarkeit des Punktes, sondern durch die Auflösung der Zeilenkamera bei der Auswertung. Oliver
Radarwarner fürs Auto haben gelegentlich auch eine Lasererkennung, wie arbeitet die denn?
Sven B. schrieb: > Fuer eine moeglichst einfach zu bauende Loesung wuerde ich versuchen, > eine Webcam mit schmalbandigem Filter davor hinzustellen und dann ein > bisschen Bildverarbeitung in Software machen. Das funktioniert bei Nacht wohl gut. Am Tag ist selbst mit IR Filter das Sonnenlicht zu hell, dass man das Lidar schon nicht mehr auf dem Bild sieht, zumindest bei größerem Abstand. > Dann hast du die falsche Kamera. Der Laser von diesen Robotern hat schon > so viel power, daß ich da nur ungern mit dem Auge reinschauen würde. Das Problem ist technischer Natur. Die Kamera muss genau dann aufmachen, wenn der Laserstrahl auftrifft. Da das nur für einen sehr kurzen Zeitpunkt ist, wird der Laserstrahl nicht immer oder unterschiedlich hell abgebildet werden. Je dunkler es ist, desto länger wird belichtet und die Wahrscheinlichkeit steigt den Laser gut auf dem Bild sehen zu können. Aber eine ganz andere Idee: In diesem Fall geht es darum den Laserstrahl direkt "sehen" zu können. Das Lidar Messgerät selbst erkennt nur die Reflektion des Laserstrahls und kann ihn immer noch gut wahrnehmen. Unser Messgerät hat aufgrund der Position einen um mindestens den Faktor 1000 höhere Lichtstärke. Kann man nicht irgendwie den Empfänger eines Lidarscanners umbauen, sodass er ein Signal liefert, wenn er ein Fremdlidarsignal empfängt? Jedenfalls: Wenn ein Lidarscanner die schwache Reflektion bei Tageslicht noch wahrnehmen kann, dann sollte es nicht so schwer sein einen Detektor zu bauen, der den direkten Laserstrahl wahrnehmen kann.
Vielleicht sollte man das Signal eines Lichtsensors einfach hochpassfiltern. Dann kommen die schnellen Impulse des Lasers durch. Wenn die dann noch eine regelmäßige Wiederholfrequenz haben, sollte sich etwas detektieren lassen. Geht es um irgendein Lidar, oder ist es möglich, die Detektion genau darauf anzupassen?
Christoph db1uq K. schrieb: > Vielleicht sollte man das Signal eines Lichtsensors einfach > hochpassfiltern. Dann kommen die schnellen Impulse des Lasers durch. > Wenn die dann noch eine regelmäßige Wiederholfrequenz haben, sollte sich > etwas detektieren lassen. > > Geht es um irgendein Lidar, oder ist es möglich, die Detektion genau > darauf anzupassen? Es soll ein mehr oder wenige universeller Lidardetektor werden, also keine Anpassung auf ein spezielles System. Der Roborock war auch nur ein Beispiel, weil ich ihn da habe. Ziel sind dann die "3D-Lidars", wie sie z.B. selbstfahrende Fahrzeuge verwenden oder im Aliexpress-Gerät-Beispiel stationär angebracht sind.
Die Wiederholfrequenz eines mechanisch abgelenkten Lidar-Scanners sollte in einem überschaubaren Frequenzbereich liegen. Ich denke da erst mal an eine simple Operationsverstärkerschaltung, Hoch- oder Bandpass. Dahinter z.B. ein Tondecoder NE567 der auf die typische Wiederholfrequenz abgestimmt ist, wenn de eng genug toleriert ist. Sonst eben ein breitbandigerer Detektor.
Hans W. schrieb: > Ziel sind dann die "3D-Lidars", wie sie > z.B. selbstfahrende Fahrzeuge verwenden oder im > Aliexpress-Gerät-Beispiel stationär angebracht sind. Das Ali-Express-Beispiel ist kein 3D-Lidar. Diese sind deutlich teurer.
Hugo H. schrieb: > Hans W. schrieb: >> Ziel sind dann die "3D-Lidars", wie sie >> z.B. selbstfahrende Fahrzeuge verwenden oder im >> Aliexpress-Gerät-Beispiel stationär angebracht sind. > > Das Ali-Express-Beispiel ist kein 3D-Lidar. Diese sind deutlich teurer. Er gibt kein 3D Bild aus, das ist korrekt. Aber der Strahl wird in einem relativ großen Bereich aufgedehnt. Das meinte ich mit 3D-Lidar. Während der Roborock aus Sicht eines feststehenden Betrachters wahrscheinlich nur eine kleine Scheibe aufnimmt, da er ja nur Hindernisse direkt vor ihm erkennen muss. Die ca. 2 cm hohe Kante des Ikea Poäng Stuhls erkennt er z.B. nicht mit seinem Lidar, sondern wird durch den Schalter gestoppt. Er fährt zwar etwas langsamer, aber trotzdem dagegen. Bei Stuhlbeinen fährt er sauber außenherum. > Die Wiederholfrequenz eines mechanisch abgelenkten Lidar-Scanners sollte > in einem überschaubaren Frequenzbereich liegen. > Ich denke da erst mal an eine simple Operationsverstärkerschaltung, > Hoch- oder Bandpass. Dahinter z.B. ein Tondecoder NE567 der auf die > typische Wiederholfrequenz abgestimmt ist, wenn de eng genug toleriert > ist. Sonst eben ein breitbandigerer Detektor. Mit welchem optischen Bauteil würdest du den Laserstrahl detektieren? Hast du einen Schaltplan für ein Ähnliches Gerät zur Hand?
Hans W. schrieb: > Die ca. 2 cm hohe Kante des Ikea Poäng Stuhls erkennt > er z.B. nicht mit seinem Lidar, sondern wird durch den Schalter > gestoppt. Er fährt zwar etwas langsamer, aber trotzdem dagegen. Bei > Stuhlbeinen fährt er sauber außenherum. Kann er auch nicht, da der Laserstrahl nun mal in Höhe der Austrittsöffnung waagerecht "rotiert" - sozusagen eine Linie an die Wand zeichnet. Er kann also nur das erkennen, was in dieser Höhe "sichtbar" ist.
Hugo H. schrieb: > Hans W. schrieb: >> Die ca. 2 cm hohe Kante des Ikea Poäng Stuhls erkennt >> er z.B. nicht mit seinem Lidar, sondern wird durch den Schalter >> gestoppt. Er fährt zwar etwas langsamer, aber trotzdem dagegen. Bei >> Stuhlbeinen fährt er sauber außenherum. > > Kann er auch nicht, da der Laserstrahl nun mal in Höhe der > Austrittsöffnung waagerecht "rotiert" - sozusagen eine Linie an die Wand > zeichnet. Er kann also nur das erkennen, was in dieser Höhe "sichtbar" > ist. Danke für die Erklärung. Mangels besseren Wissens bezeichne ich das dann als "Linienlidar", während das Aliexpress Beispiel und auch für selbstfahrende Fahrzeuge ein "Flächenlidar" ist, da dort der Laser auf eine Fläche aufgespannt ist. Beim zu konstruierenden Detektor geht es also um die Erkennung eines Flächenlidars.
Nein, keine Erfahrung mit sowas. Ich weiß nur, dass z.B. Fotowiderstände schon von den 50 Hz einer Leuchtstofflampe nicht viel mitbekommen. Es sollte schon ein schnellerer Fotodetektor sein. Mechanische Ablenkung wäre jedenfalls noch Niederfrequenz. Irgendeine BPW34 oder ähnliches vielleicht. Dazu nimmt man gern eine Transimpedanzverstärkerschaltung, eine Art I-zu-U Wandler. https://www.vishay.com/docs/81521/bpw34.pdf 430 to 1100 nm, also auch noch Infrarot "high speed and high radiant sensitivity" http://www.opengeiger.de/StuttgarterGeigerleV1.pdf Eine Geigerzählerschaltung mit der Diode
Hans W. schrieb: > Ziel sind dann die "3D-Lidars", wie sie > z.B. selbstfahrende Fahrzeuge verwenden oder im > Aliexpress-Gerät-Beispiel stationär angebracht sind. a) Es gibt verschiedene Wellenlängen. So wie ich weit ich das beurteilen kann sind 850/905/940/1064/1550nm gängige Werte und gerade 1550nm kann man mit einer Silizium-Fotodiode praktisch nicht vernünftig empfangen. Wenn das wirklich wichtig ist, dann brauchst du eben einen 2. Empfänger auf InGaAs-Basis. Was die kleineren Wellenlängen angeht (zumindest bis 940nm): Das kann eine Siliziumdiode schon alles zusammen empfangen, aber das verhindert halt den Einsatz von schmalbandigen Filtern vor dem Empfänger. b) Die Punktewolke die das Lidar erzeugt muss nicht dicht sein. Gerade die rotierenden Geräte haben zwischen den Strahlen Lücken drin, d.h. es kann passieren, dass der Laser an Deinem Empfänger vorbei zielt. Wenn das Auto auf den Empfänger zufährt, dann ist Wahrscheinlichkeit natürlich groß, dass der Empfänger trotzdem regelmäßig getroffen wird. c) Viele Lidare arbeiten mit einzelnen kurzen starken Impulsen aber nicht alle. Das Intel-Lidar (Realsense L515) sendet ein Bitmuster und es gibt Lidare die FMCW machen. Die senden die ganze Zeit und modulieren dabei die Frequenz vom Licht. Da gabs einige Startups die das machen und die besten wurden gekauft. Ob da aber auch echte Produkte daraus wurden weiß ich nicht. Da sie immer senden sind sie deutlich schlechter vom Hintergrund zu trennen. d) Es gibt auch Systeme mit indirektem Time-of-Flight (iTof). Die haben weniger Reichweite und sind deswegen eher nicht an Autos zu finden, aber an einem autonomen Fahrzeug in einer Fabrik oder dem Roboter im Supermarkt kann das schon sein.
Machs wie Spock, detektiere und analysiere die Energiesignatur des aktiv Lidar betreibenden. Auch Lidars sind nicht perfekt abgeschirmt und daher auch im EM-Spektrum gut als Störnebel mit charakteritischen Spektrum erkennbar. Für den Puls wird ganz schön was an Strom auf dem PCB geballert und wird dadurch im EM Spektrum erkennbar. Am besten noch mit einer array-antenne einpeilen.
>Time-of-Flight im neuen Elektor Special "Arduino Shields" ist eine Platine mit dem hier beschrieben: https://www.st.com/en/imaging-and-photonics-solutions/vl53l0x.html 940 nm Was besagt "indirekt"?
Christoph db1uq K. schrieb: > Was besagt "indirekt"? Die senden moduliertes Licht und messen dann die Phase. Das beruht zwar auf der Lichtlaufzeit, aber die Zeit wird nicht direkt gemessen, sondern eben indirekt über die Phase. Dafür gibts auch schon länger Imager. Die sollte man auch ganz gut detektieren können, aber die Signale sehen halt ganz anders aus als bei einem klassischen Lidar (dTof=direkt TOF).
Angehängte Dateien:
-

RoborockPunktlidar.jpg
110 KB

Der Roborock verwendet ebenfalls ein punktförmiges Lidar. Im Beispielbild wurde die Szene mit einer IR-Fernbedienung aus 4 Metern Abstand "beleuchtet". Unter schwacher IR Beleuchtung sind die Punkte auf der IR Kamera deutlich besser erkennbar. Der Roborock selbst stand etwas schräg, sodass das Lidar 30 bis 40 cm Abstand zur "Projektionsfläche" hatte. Wo das Lidar besonders hell zusehen ist, ist ein normales DIN A4 Papier. Fährt man den Roborock auf mehrere Meter Abstand, sind die einzelnen Punkte schnell auch mal 10 cm voneinander entfernt. Die Punkte bleiben konstant an derselben Stelle, d.h. das Lidar trifft trotz schneller Rotation immer wieder dieselbe Stelle. Eine beeindruckende Leistung. Wenn also ein 3D-Lidar ebenfalls einige wenige Punkte anfährt, kann der Lidardetektor auch mit dem Roborock zwischen den Punkten getestet werden, ob genügend Streulicht ankommt um das Lidar zuverlässig zu entdecken. Zur Konkretisierung der Detektorschaltung: Ich gehe davon aus, dass das Lidar irgendwas im Bereich von 900 bis knapp über 1000 nm ist. Als Detektordiode wird eine PBW34 verwendet https://www.vishay.com/docs/81521/bpw34.pdf Zur Verstärkung wird wohl ein Operationsverstäker verwendet. Die Diode empfängt ja nicht nur das IR-Licht des Lidars, sondern wird auch durch anderes Licht etwas leitend. Wie blendet man das aus? Ein Kondensator fuktioniert ja nur um den Gleichspannungsanteil zu unterdrücken. Hier gibt es aber nur eine schwankende Gleichspannung bzw. Gleichstrom. Wie macht das eigentlich ein Fernseher um das IR-Licht der Fernbedienung auch bei Sonnenschein im Raum erkennen zu können? Das Signal der Diode wird dann durch einen Operationsverstärker verstärkt. Es wurde hier ein Beispiel des Stuttgarter Geigerle verlinkt. Diese Schaltung erscheint mir hier nicht direkt anwendbar, da beim Stuttgarter Geigerle die Messdioden in Sperrichtung gepolt sind. Hier fließt aber je nach Umgebungslicht mehr oder weniger Strom durch die Diode. Welche Operationsverstärker sind hier zu empfehlen? Die Schaltung sollte optimalerweise mit 5 Volt funktionieren. Wenn das Signal dann durch den Operationsverstärker verstärkt wurde, dann kann man, wenn ich das richtig verstanden habe, bei Verstärkung, je nach Frequenz des Lidars einen Ton hören. Sollte die Frequenz zu hoch sein, kann man zumindest etwas auf dem Oszilloskop erkennen. Im nächsten Schritt wird das Signal dann an einen NE567 weitergeleitet, der dann erkennt, ob ein Tonsignal anliegt und wenn ja ein Signal auf PIN 8 ausgibt. Habe ich das so richtig zusammengefasst? Wenn jemand mit mehr Ahnung beim Thema Schaltungsentwicklung als ich (was nicht schwer sein dürfte) einen groben Schaltplan für den Lidardetektor erstellen und ihn hier posten kann, wäre ich sehr dankbar.
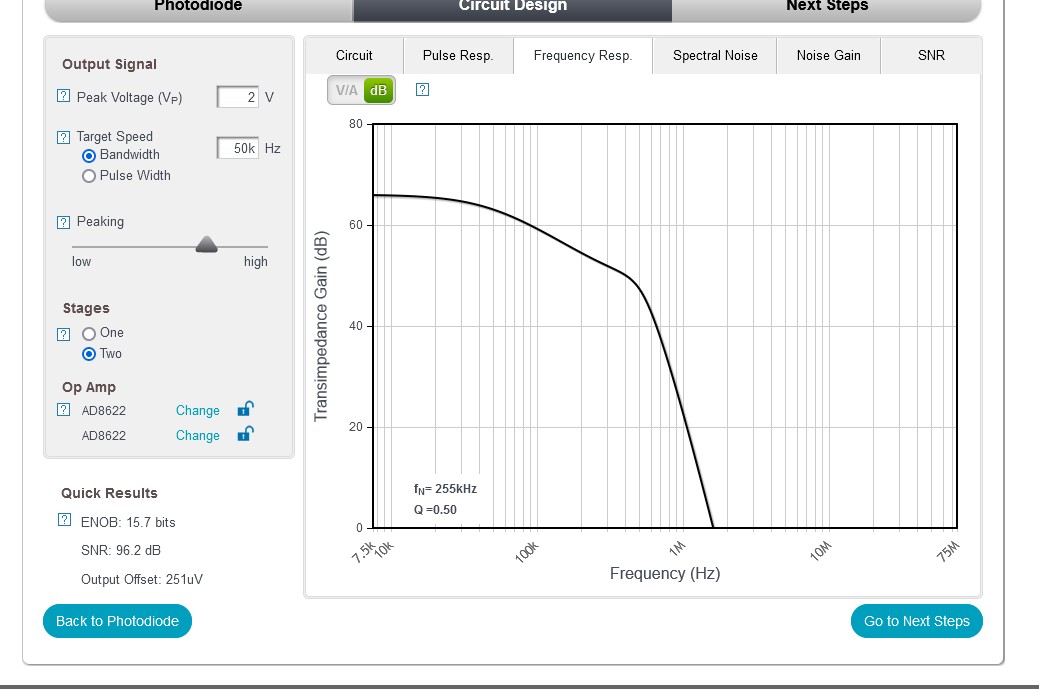
Hans W. schrieb: > Zur Konkretisierung der Detektorschaltung: Ich gehe davon aus, dass das > Lidar irgendwas im Bereich von 900 bis knapp über 1000 nm ist. Da Du auch die Lidare in Autos angesprochen hast: Continental benutzt bei seinem Flash-Lidar 1064nm und ein paar andere benutzen 1550nm, z.B. Luminar, die nächstes Jahr bei Volvo in Serie gehen sollen. > Die Diode empfängt ja nicht nur das IR-Licht des Lidars, sondern wird > auch durch anderes Licht etwas leitend. Wie blendet man das aus? > Wie macht das eigentlich ein Fernseher um das IR-Licht der Fernbedienung > auch bei Sonnenschein im Raum erkennen zu können? Mit einem optischen Filter vor dem Empfänger. Die sehen oft schwarz aus, weil sie kein sichtbares Licht durchlassen, sondern eben nur Infrarotes. Beim Fernseh-Empfänger ist das auch davor, da fällt es einem meistens nicht auf. Bei IR-Fernbedienungen ist sowas auch oft dran, weil es schöner aussieht und die Funktion nicht stört. Was Schaltungen angeht: Es gibt von Analog Devices diese Seite, in der man die Daten der Schaltung eingibt und das Tool schlägt eine Parametrierung der OpAmps vor. https://tools.analog.com/en/photodiode/
Angehängte Dateien:
{kind=link}
> Was Schaltungen angeht: > Es gibt von Analog Devices diese Seite, in der man die Daten der > Schaltung eingibt und das Tool schlägt eine Parametrierung der OpAmps > vor. https://tools.analog.com/en/photodiode/ Vielen Dank, dieser Rechner hilft mir sehr weiter. Als Werte für das Schaltungsdesign habe ich bei Kapazität 70pf und als Shunt Resistance 5 Gigaohm eingetragen bzw. aus dem Auswahlfeld für die Diode die VBPW34S von Vishay genommen. Diese SMD-Version hat fast dieselben identischen technischen Daten. Bei Peak-Light Intensity habe ich 200 W/m² angegeben, was 1,18 mA als Peakcurrent ergibt. Dieser liegt folgende Überlegung zu Grunde: Direktes Sonnelicht hat etwas zwischen 500 und 1000 W/m². Vor die Diode kommt ein IR-Filter mit 850 nm, sowas wie https://www.amazon.de/Halogenscheinwerfer-infrarotfilter-fotografie-infrarotfotografie-Sperrfilter/dp/B005HIYCPE/ Gibts das auch günstiger? Sonnenlicht besteht zu 50 % aus IR und damit die Schaltung auch noch gut bei Sonnenlicht funktioniert, habe ich die 200 W/m² gewählt. Mit diesen Einstellungen braucht es aber eine Bandbreite von > 50 KHz. Das Lidar wird aber wohl eine deutlich geringere Frequenz haben. Das Aliexpress Lidar wird z.B. im Video mit 10 kHz (!= Framerate) beworben. Wenn man den Strom auf 0,5 mA reduziert und eine Bandbreite von 15 kHz angibt, bekommt man eine vernünftige Schaltung. Andererseits bei Eingabe von 50 kHz bekommt man auch darunter einen guten Verstärkungsfaktor, siehe angehängtes Bild bei einem Peakcurrent von 1mA. Passt das dann so mit dieser Schaltung um einen Lidardetektor zu bauen oder sollte man den Peakcurrent deutlich geringer wählen, weil die meiste Zeit die Diode nicht im direkten Sonnenlicht sein wird? Bei 0,1 mA Peakcurrent wird einem auch ein ganz anderer Operationsverstärker angeboten... Um die Wahrscheinlichkeit zu erhöhen vom Laser getroffen zu werden, kann man ja 3 Dioden nebeneinander anordnen und parallel schalten. Dafür würde ich dann in den Photodioden Spezifikationen statt 70 pF das 3fache, also 210 pF angeben, den Widerstand dritteln, also 1.67 GHz und den Peakcurrent nur verdoppeln, da nicht alle 3 Dioden gleichzeitig getroffen werden. Macht die Schaltung so Sinn und erkennt ein Lidar besser? Danke für euer Fachwissen.
Bandbreite: Was passiert, wenn ein Puls mit 5ns Breite durch ein Filter mit 50kHz Bandbreite geht? Pulsrate: Es gibt da leider alles. Lidare, die einen starken Puls pro Bild senden (30 Pulse bei 30fps) und andere, die eine Million Pulse pro Sekunde machen und natürlich alles dazwischen. Mehrere Fotodioden: Die Standardlösung dafür ist eine Fotodiode mit einer Optik (Linse/Objektiv) davor. Noch ein paar Links: IR-Impulse detektieren. Dem Autor geht es aber um "normale" Signale in der Umgebung, nicht um Lidar. Er erklärt die Schaltung aber sehr ausführlich. https://www.youtube.com/watch?v=FtdJ4e973bk OpenTofLidar. Das ist ein richtiges Lidar, aber das muss natürlich die Reflexion des Signals empfangen können, während Du ja direkt in den Laser schauen möchtest, also ein viel stärkeres Signal hast. Vielleicht kannst Du trotzdem was mitnehmen. https://github.com/iliasam/OpenTOFLidar Ronja. Schnelle IR-Datenübertragung über große Entfernungen. Die Schaltungen sind ziemlich diskret aufgebaut. http://ronja.twibright.com/
Markus K. schrieb: > Bandbreite: Was passiert, wenn ein Puls mit 5ns Breite durch ein Filter > mit 50kHz Bandbreite geht? Die Idee war: Der Laser wird ja aufgefächert und trifft dann z.B. 1000 mal pro Sekunde auf die Photodiode. Macht 1 kHz. Das heißt also, man muss auch noch die Dauer des Laserimpulses selbst bei der Bandbreite berücksichtigen, richtig? > Mehrere Fotodioden: Die Standardlösung dafür ist eine Fotodiode mit > einer Optik (Linse/Objektiv) davor. Wie nennt sich so eine Linse, die dann z.B. eine 180° Erfassung ermöglicht? > Noch ein paar Links: > > IR-Impulse detektieren. Dem Autor geht es aber um "normale" Signale in > der Umgebung, nicht um Lidar. Er erklärt die Schaltung aber sehr > ausführlich. > https://www.youtube.com/watch?v=FtdJ4e973bk Danke, das scheint genau das zu sein, was ich hier bauen möchte. Wenn ich das richtig verstehe, wird diese Schaltung auch das Lidar erkennen können und auf dem Oszilloskop werden sich dann kurze Spikes in regelmäßigen Abständen zeigen. Die Diode ist die gleiche, die hier schon vorgeschlagen wurde. Auch das Schaltungsdesign ist sehr ähnlich zu dem was das Analog Devices Tool https://tools.analog.com/en/photodiode/ vorschlägt. In der ersten Stufe sind lediglich die Widerstände anders und ein paar zusätzliche Bausteine. Hier https://github.com/devttys0/IRis gibts den kompletten Schaltplan und auch den Link zum Youtube-Video. Da die Schaltung 3,3 Volt verwendet, kann die Ausgabe auch mittels eines Raspberry PIs direkt am GPIO analysiert werden. Oder gibt es etwas, was diese Schaltung zur Lidarerkennung unbrauchbar macht?
Hans W. schrieb: > Wie nennt sich so eine Linse, die dann z.B. eine 180° Erfassung > ermöglicht? Fischauge.
Hans W. schrieb: > Markus K. schrieb: >> Bandbreite: Was passiert, wenn ein Puls mit 5ns Breite durch ein Filter >> mit 50kHz Bandbreite geht? > > Die Idee war: Der Laser wird ja aufgefächert und trifft dann z.B. 1000 > mal pro Sekunde auf die Photodiode. Macht 1 kHz. Das heißt also, man > muss auch noch die Dauer des Laserimpulses selbst bei der Bandbreite > berücksichtigen, richtig? Stell Dir vor, Du hättest elektrische Störungen mit 100MHz und wolltest die wegfiltern. Dann würdest Du doch z.B. einen Tiefpass mit 1MHz Grenzfrequenz nehmen. So ähnlich passiert das auch hier. >> https://www.youtube.com/watch?v=FtdJ4e973bk > Oder gibt es etwas, was diese Schaltung zur Lidarerkennung unbrauchbar > macht? Ich habe mir das Video schon vor längerer Zeit mal angeschaut. Evtl. die Grenzfrequenzen.
Moin zusammen, viel Spaß bei der Detektion von 5 ns Laserpulsen oder kürzer… Vielleicht wäre es für den Themenstarter einfacher sich an die gängigen Geschwindigkeitsbegrenzungen zu halten, dann müsste er nicht nach Lidarsystemen Ausschau halten, die seine Geschwindigkeitsüberschreitungen detektieren. Und gesünder für uns alle hier wäre es auch. Ansonsten ist es natürlich technisch interessant… Herzliche Grüße Georg
Georg schrieb: > Moin zusammen, > > viel Spaß bei der Detektion von 5 ns Laserpulsen oder kürzer… > Vielleicht wäre es für den Themenstarter einfacher sich an die gängigen > Geschwindigkeitsbegrenzungen zu halten, dann müsste er nicht nach > Lidarsystemen Ausschau halten, die seine > Geschwindigkeitsüberschreitungen detektieren. > Und gesünder für uns alle hier wäre es auch. > > Ansonsten ist es natürlich technisch interessant… > > Herzliche Grüße > Georg Kommzerzielle Radarwarner enthalten fast immer auch Laserwarner. Wenn ich das wollte, könnte ich es viel einfacher haben.... Und jetzt zurück zum Thema. > Ich habe mir das Video schon vor längerer Zeit mal angeschaut. Evtl. die > Grenzfrequenzen. Ich probiere die Schaltung aus und berichte die Erfahrungen hier.
Hans W. schrieb: > Wenn > ich das wollte, könnte ich es viel einfacher haben.... Und, was willst Du denn eigentlich genau? Was ist der Zweck der "Geschichte"?
Hugo H. schrieb: > Und, was willst Du denn eigentlich genau? Was ist der Zweck der > "Geschichte"? Deine fehlende Antwort spricht Bände ... Mit Deiner Kenntnis, welche ich hier von Dir wahrnehme, wirst Du Dein (vermutliches) Ziel nicht erreichen.
@wetterdaten: Hast du die Schaltung mittlerweile aufgebaut? Funktioniert die Lidarerkennung? Aus welcher Entfernung?
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.