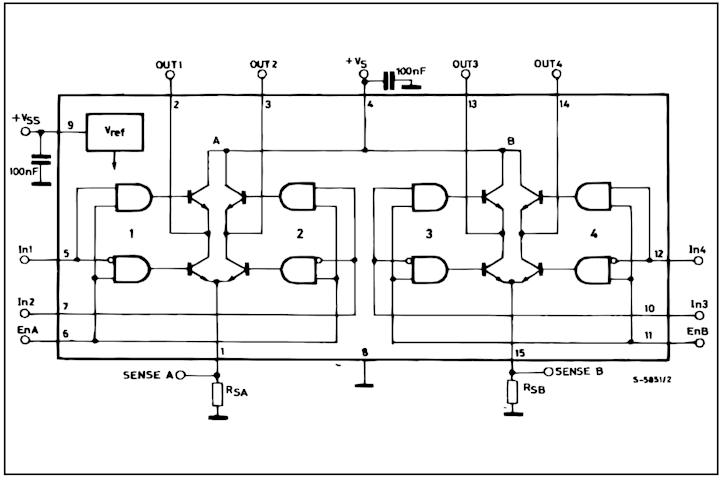
Hallo, für meine bisherigen Schritt-Motor Ansteuerungen habe ich den L298 (siehe Bild) in Kombination mit dem L297 verwendet. Der L298 kann aber nur 2A. Ich brauche jetzt aber was bis ca. 8A. Habt ihr einen Vorschlag, was man da nehmen kann ? Schon mal Danke für Eure Hilfe !
Angehängte Dateien:
-

L298.png
29 KB
Manfred L. schrieb: > Habt ihr einen Vorschlag, was man da nehmen kann IHM03A1 wie hier: https://www.st.com/en/ecosystems/x-nucleo-ihm03a1.html Dann lernst du auch Stromregelung und Mikroschritt kennen, und sogar stall guard. Denk dran, dass ein 8A Schrittmotor diese 8A als rms nimmt, der Treiber aber 8*1.4=11.2A Spitzenstrom liefern können sollte.
Danke Dir für den Tip. Und mit ca. 11€ bei RS-Components ist das Eval-Board auch noch preisgünstig. Hab mir mal das Datenblatt angeschaut (siehe attached) und da finde ich nur den "POWERSTEP01" Prozessor, von dem ich noch nie was gehört habe. Und wo ist die Leistungs-Elektronik ? Muß man die noch selber "basteln" ? Ja, Du hast Recht, mit Microstep habe ich noch nichts am Hut gehabt. So wie ich das aber hoffentlich richtig verstanden habe, geht das Incrementalmoment dabei ordentlich in die Knie: schon mit 16 Microschritten sind's nur noch ca. 10% vom Haltemoment eines Vollschrittes. Da nützen mir dann die 8A auch nichts mehr. Meine Anforderungen sind eher mäßig und der Vollschritt-Mode reicht vollkommen für meine Applikation aus.
Manfred L. schrieb: > finde ich nur den "POWERSTEP01" Prozessor, von dem ich noch nie was > gehört habe. Und wo ist die Leistungs-Elektronik Im IHM03A1 > Muß man die noch selber "basteln" ? Ein uC der ihn ansteuert. > Incrementalmoment dabei ordentlich in die Knie: schon mit 16 > Microschritten sind's nur noch ca. 10% vom Haltemoment Nein, das Haltemoment bleibt voll erhalten. Nur sind die Mikroschritte keine Vollschritte mehr sondern haben kleinere Winkel. Das Wegdrehen von der Idealposition bleibt aber absolut gleich wirkt sich also auf so eine Mikroschrittposition prozentual viel stärker aus. Man kann also nicht einfach aus einem 200 Schritte Motor durch Mikroschritte 3200 Positionen machen, und erwarten, dass die Achse die Position so genau halt, wie bei einem echten 3200 Schritt Motor. So eine Mikroschrittposition ist nur eine 'gedachte' Position. Dafür laufen die Motoren viel weicher.
Manfred L. schrieb: > So wie ich das aber hoffentlich richtig verstanden > habe, geht das Incrementalmoment dabei ordentlich > in die Knie: schon mit 16 Microschritten sind's nur > noch ca. 10% vom Haltemoment eines Vollschrittes. Warum sollte? Schrittmotoren sind eigentlich nur Synchronmotoren mit Rastmoment. "Mikroschrittbetrieb" ist eigentlich nur eine hoch- trabende Umschreibung für "wir machen jetzt endlich das, was anderswo schon seit 100 Jahren Standard ist: Wir bieten dem Motor ein ordentliches Drehfeld mit sinusförmigen Phasenströmen an". > Meine Anforderungen sind eher mäßig und der > Vollschritt-Mode reicht vollkommen für meine > Applikation aus. Der Hauptvorteil des Mikroschrittbetriebes liegt weniger in der Positioniergenauigkeit (die ist, wie MaWin schon erklärt hat, nur bedingt ausnutzbar), sondern im verringerten Krach, den der Motor macht, und in der verringerten Gefahr mechanischer Resonanzen. Die verringerten Vibrationen schonen auch den Rest der Mechanik.
MaWin schrieb: > Manfred L. schrieb: >> Incrementalmoment dabei ordentlich in die Knie: schon mit 16 >> Microschritten sind's nur noch ca. 10% vom Haltemoment > > Nein, das Haltemoment bleibt voll erhalten. Nein, so ist das nicht ganz richtig. Es darf das gleiche Haltemoment nur sehr kurz genutzt werden. Es werden in dem Zustand mehrere Wicklungen gleichzeitig bestromt und das führt zu mehr Erwärmung im Dauerbetrieb. Ohne Drehung fehlt die innere Eigenbelüftung, die die Abwärme verteilt. D.h. ein Inkrementalmoment im Stillstand halten zu wollen als längere Dauerposition würde den Motor killen.
Dieter schrieb: > Nein, so ist das nicht ganz richtig. Es darf das gleiche Haltemoment nur > sehr kurz genutzt werden. Es werden in dem Zustand mehrere Wicklungen > gleichzeitig bestromt und das führt zu mehr Erwärmung im Dauerbetrieb. Wenn der Motor das Haltemoment im Vollschrittbetrieb erzeugen kann, kann er das genauso im Mikroschrittbetrieb. Der Effektivstrom wird ggf. nur anders auf die Wicklungen verteilt.
Dieter schrieb: > Nein, so ist das nicht ganz richtig. Es darf das gleiche Haltemoment nur > sehr kurz genutzt werden. Es werden in dem Zustand mehrere Wicklungen > gleichzeitig bestromt und das führt zu mehr Erwärmung im Dauerbetrieb. > Ohne Drehung fehlt die innere Eigenbelüftung, die die Abwärme verteilt. > D.h. ein Inkrementalmoment im Stillstand halten zu wollen als längere > Dauerposition würde den Motor killen. Unsinn So viel mehrere Wicklungen gibt es gar nicht, sondern nur 2. Die werden auch schon bei Vollschrittbetrieb beide bestromt. Im Vollschrittbetrieb mit dem am Motor angegebenen rms-Strom, im Mikroschrittbetrib ebenfalls denn wenn beide Wicklungen bestromt werden stehen sie nei 45 Grad. Nur geht der Spitzenstrom im Mikroschritt auf den 1.4-fachen rms-Strom den Motors bei 0 Grad oder 90 Grad, weil dort die andete Spule nicht mehr bestromt wird. Siehe: https://dse-faq.elektronik-kompendium.de/dse-faq.htm#F.10
> Und wo ist die Leistungs-Elektronik ? > Muß man die noch selber "basteln"? Nein, der Powerstep01 IST der komplette Treiber, der 85V 10A dank der 16 Milliohm-FETs liefern kann (bei entsprechender Kühlung und Parametrierung [siehe eigenes PDF Programmable DMOS slew rate, deadtime and blanking-time zur Reduzierung der Verlustleistung]). Meine Gedanken und Fragen dazu: 1. Warum hat er einen so exotischen Namen? Er ist sehr ähnlich zu den Mitgliedern der L647x-Familie, warum hat man ihn nicht L6xxx genannt? 2. Warum hat NUR der L6474 einen DIR (direction)-Eingang, der erst nach einer SPI-Konfiguration als solcher nutzbar ist? Damit hat STMicro wirklich ein Eigentor geschossen. Sie hätten die Treiber so bauen müssen, dass sie im POR-Einschalt-Zustand eine parallele Schnittstelle (Step+Dir) haben. Dann hätte man sie einfach ohne µC als modernen L297&L298 L6208-NanotecXXX-ToshibaYYY-TrinamicZZZ-Ersatz verwenden können. Ein Zuckerl wäre gewesen, wenn im Parallel-Mode einige der 89 Pins für eine Hardware-Konfiguration verwendet würden. 3. Warum haben viele Register so komische ("ungerade") Größen? z.B. 22 statt 24 oder 32-Bit Zähler? 4. Warum haben viele Register keine negativen Werte? Z.B. für Rückwärtslauf eine negative Geschwindigkeit? Als Arduino-Lib mit zwei Beispielen (auch für den Arduino Zero / M0) empfehle ich Ponoor_PowerSTEP01_Library, die hat nämlich nicht nur den Voltage-Mode wie die original-PowerSTEP01-Library, sondern auch den viel besseren Current-Mode (CM_VM bit in STEP_MODE register is set to 1). Allerdings fehlen auch dieser noch einige Bits, z.B. das Boost_Mode-Bit im FS_SPD. Und die Sign-Erweiterung der 22-Bit-Register ist unnötig, da trotz der 22 Bit Zählerbreite 32 korrekt vorzeichenerweiterte Bits übertragen werden. Das x-nucleo-ihm02a1 ist ein Board mit zwei L6470, (45V 2,xA) Das x-nucleo-ihm03a1 ist ein sehr günstiges EVAL-Board: https://estore.st.com/en/x-nucleo-ihm03a1-cpn.html Es gibt auch noch das 45 Euro teure EVLPOWERSTEP01. https://estore.st.com/en/evlpowerstep01-cpn.html > Und mit ca. 11€ bei RS-Components ist das Eval-Board > auch noch preisgünstig. Nur ein Problem: es gibt momentan keine Chips und keine Platinen, erst im Januar 2022 wieder. Bei ebuy habe ich das einzig verfügbare IHM03A1 geschnappt, es funktioniert auf Anhieb. https://estore.st.com/en/catalogsearch/result/?q=powerstep01 Es gibt hier im Forum nur 8 andere Threads zu diesem IC. Weil es so unbekannt ist? Weil es keine Probleme macht? Es gibt bei STM eine Eagle-Lib (das 89-polige QFN11x14-Layout ist sehr eigenwillig). Datenblatt: https://www.st.com/resource/en/datasheet/powerstep01.pdf Errata: Table 56. STATUS register Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 15 --> Bit 8 statt Bit 15 > Dann lernst du auch Stromregelung und Mikroschritt kennen, > und sogar stall guard. The stall detection is operative only when the voltage mode control is selected. Der Voltage-Mode muss aber sehr gut an den Motor angepasst werden und tendiert (vor allem bei höheren Geschwindigkeiten) stark zu Resonanzen, da die Stromanstiegsgeschwindigkeit stark vom Luftspalt und damit vom Lastwinkel abhängig ist.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.