Hallo liebe community ich sollte eine Kraftschätzung bzw. eine Kraftregelung eines Greifers durch einen Beobachteralgorithmus und eine Strommessung realisiert werden. Zur Verfügung gestellt wird zuerst nur ein Mikrokontroller, worauf der Beobachteralgorithmus programmiert werden soll. Basierend auf ein mathematisches Modell wird eventuell eine Strommessung entworfen und realisiert. Die Messdaten werden durch den Mikrokontroller verarbeitet und für die Schätzung der Kraft beim Greifen verwendet. hat jemanden eine Idee von dieser konzept, oder vielleicht die gleiche arbeit gemacht hat? ich danke euch im Voraus
Kraftregelung eines Greifers durch einen Beobachteralgorithmus und eine Strommessung realisiert werd
Eventuell F=f(A) Versuch einfach Mal einen (den) drehenden Motor mit dem Hand anzuhalten bzw zu bremsen und mess gleichzeitig den Strom. Beim Greifer kommt ggfs noch eine Mechanik ins Spiel.
Erik B. schrieb: > ich sollte eine Kraftschätzung bzw. eine Kraftregelung eines Greifers > durch einen Beobachteralgorithmus und eine Strommessung realisiert > werden. Hmm, könntest du mal sagen was du unter "Kraftschätzung bzw. eine Kraftregelung" Physikalisch verstehst? Vllt. auch mal ein Bildchen um das Konzept verstehen zu können was da so als Greifer verwendet werden soll.
Erik B. schrieb: > Basierend auf ein > mathematisches Modell Genau das musst du jetzt erst mal herleiten. Dazu brauchst du Messwerte des Aktors im Zielsystem. > ich sollte eine Kraftschätzung bzw. eine Kraftregelung eines Greifers > durch einen Beobachteralgorithmus und eine Strommessung realisiert > werden. Dazu musst du erstmal nachweisen, dass das System sowas überhaupt hergibt. Ganz zum Schluß kommt dann die Implementierung des Regler auf dem uC...
Erik B. schrieb: > ich sollte eine Kraftschätzung bzw. eine Kraftregelung eines Greifers > durch einen Beobachteralgorithmus und eine Strommessung realisiert > werden. Wie bitte?
Ich habe sowas mal für das Kippmoment eines 20t Kranes programmiert, aber das A und O sind die eingehenden Messwerte. Du musst den Greifer modellieren, seine 3D Position, Stromaufnahme und am besten noch einen Kraftmesser. Der Rest ist nicht so komplizierte Trigonometrie und ein bisschen verschnurzeln der sonst so gemessenen Parameter.
Ich wuerd erst mal den Zusammenhang der Kraft zum Strom messen. Du wirst sowieso beides etwa messen koennen muessen. Wenn du eine verwackelte, verrauschte Gerade mit einem Hysterese bekommst weisst du eine Approximation 1.Ordnung wird hinkommen. Vielleicht hat die Kurve dank toller Sensoren und Elektronik auch eine tolle Aufloesung mit wenig Rauschen. Dann ist auch mehr erwartbar. Und das Modell muss mehr bringen. Allenfalls hat die gemessere Kurve auch noch eine Abhaengigkeit von der Orientierung, herruehrend aus dem Eigengewicht der Teile. Dann wuerde ich mal die Mathe eines Physikers hervorziehen. Dann kannst du gleich die Anordnung optimieren. Erscheint mir aber machbar. Zeig mal ein Bild eines 3D modelles des Greifers. Ueberall wo Reibung ist, wird's muehsam.
Angehängte Dateien:
{kind=link}
Vielen Dank für Ihre Antwort, der Greifer ist bereits eingebaut und verfügt über 2 DC-Motoren, der erste zum Greifen und der zweite zum Heben / Anheben. Physikalisch gesehen greift der Greifer jetzt unabhängig vom Objekt, ohne Unterschied, ob es sich um ein Ei, Metall oder etwas anderes handelt. Was ich verstanden habe, werde ich zuerst in der theoretischen/Mathematisch Betrachtung des Motors darstellen. Ein vereinfachtes Modell wird in Matlab entworfen. dann wird der Beobachter als Lösungsansatz für den Schätze eingeführt. das Konzept eines Beobachteralgorithmus auf dem Mikrocontroller (ESP32) verstehe ich leider nicht. Ich habe ESP32, Stromsensor, Treiberboard A3952SB Vollbrücken-PWM-Motortreiber zu verfügen. ist schon klar Kraft/Drehmoment des Motors ist proportional proportional zum Ankerstrom: das Drehmoment kann also direkt und genau gesteuert werden. Wenn ich die Drehmomentkonstante Km (Nm/A)* Ankerstrom (A)=...Nm nehme, dann ist die Kraft, nach der ich suche. ich versuche auch diese Projekt zu verstehen, übrigens das ist ein Thema für Mein Projekt an der Fachhochschule
Angehängte Dateien:
{kind=link}
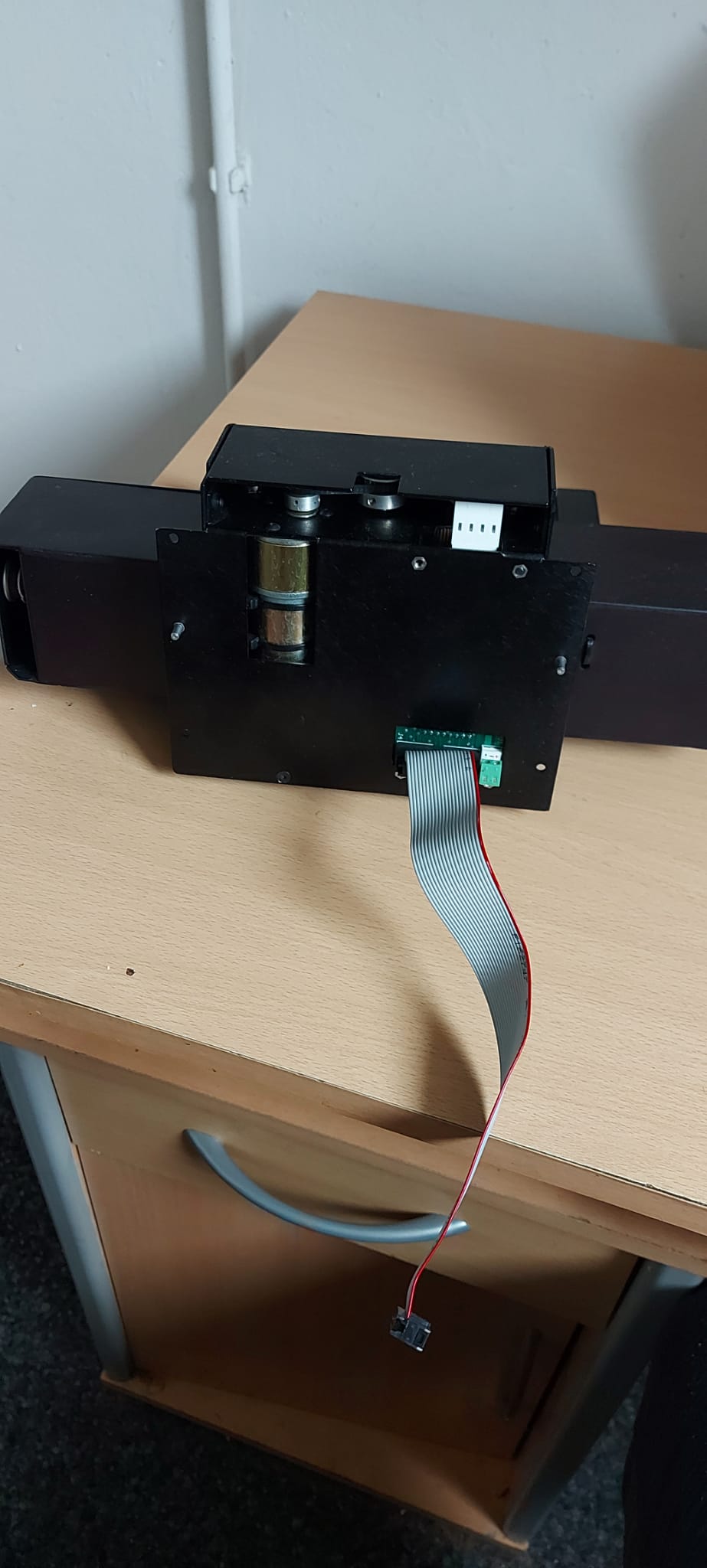
Der Greifer sieht so aus
Und der Motor greift ueber eine Schraube, resp eine Schnecke ? Dann hast du eine hohe Reibung, eine hohe Hysterese. Edit, ueber ein Schraube - vergiss das Konzept. Mach die Sensoren naeher bei der Kontaktflaeche. Resp miss mal, wie ich's ober sagte.
Erik B. schrieb: > ich sollte eine Kraftschätzung bzw. eine Kraftregelung eines Greifers > durch einen Beobachteralgorithmus und eine Strommessung realisiert > werden. In welchem Kontext ist denn die Aufgabenstellung einzuordnen? - Abschlussarbeit - Prüfung - Hobby - Auftrag - ???
Erik B. schrieb: > Wenn ich die Drehmomentkonstante Km (Nm/A)* Ankerstrom (A)=...Nm nehme, > dann ist die Kraft, nach der ich suche. Der Witz ist, dass das nur beim Zusammenfahren gilt und die Mechanik sowohl integrierend wie auch selbsthemmend ist. Wenn man den Strom in deiner Rechnung schlagartig auf 0 absenkt, wird die real wirkende Kraft trotzdem unverändert konstant sein. Aber das soll ja der "Beobachter", der die gesamte Greifermechanik modelliert, abfangen...
die Projektarbeit Vor der Abschlussarbeit
Purzel H. schrieb: > Und der Motor greift ueber eine Schraube, resp eine Schnecke ? Dann hast > du eine hohe Reibung, eine hohe Hysterese. > > Edit, ueber ein Schraube - vergiss das Konzept. Mach die Sensoren > naeher bei der Kontaktflaeche. > > Resp miss mal, wie ich's ober sagte. Danke, ich werde weiter darüber nachdenken, was du mir geschrieben hast.
Den Weg zum Ziel hast du doch schon fast selbst richtig beschrieben. Modell des Motortreibers erstellen. Modell des DC-Motors ermitteln. Getriebemodell und kinematische Kette aufstellen. alle Modelle koppeln Kraft zu Strom Zusammenhang herstellen. Ich würde jetzt wie folgt vorgehen: jedes der Teilmodelle als Zweitor aufstellen und in die jeweiligen A-Parameter umwandeln alle A-Parameter als Kettenmatrix zusammenfassen Gleichungen nach Strom umstellen
Joe G. schrieb: > Ich würde jetzt wie folgt vorgehen: > jedes der Teilmodelle als Zweitor aufstellen und in die jeweiligen > A-Parameter umwandeln > alle A-Parameter als Kettenmatrix zusammenfassen > Gleichungen nach Strom umstellen vielen Dank für die Hinweise, ich werde mich in diese Richtung vertiefen, obwohl mir die Realiesierung des Algorithmus auf Mikrocnotrolle nicht klar ist
Joe G. schrieb: > In welchem Kontext ist denn die Aufgabenstellung einzuordnen? > - Abschlussarbeit > - Prüfung > - Hobby > - Auftrag > - ??? Welche Rolle spielt das?
Erik B. schrieb: > ich werde mich in diese Richtung vertiefen, obwohl mir die > Realiesierung des Algorithmus auf Mikrocnotrolle nicht klar ist Den Algorithmus selbst kannst du beschreiben / skizzieren? Versuche, deine Gedanken zu sortieren, bzw. deine Unklarheit in Worte zu fassen. Das drauf rumdenken auf dem Problem ist der erste Schritt zur Lösung des Problems. -> Was genau ist dir denn in der "Realisierung des Algorithmus auf Mikcorocontroller" unklar?
Was hat der Algorithmus mit dem Mikrocontroller zu tun ? Der kommt spaeter.
schau dir mal adaptive regelungen an.
> -> Was genau ist dir denn in der "Realisierung des Algorithmus auf > Mikcorocontroller" unklar? ich habe überhaupt noch keine Idee davon.
>> "Realisierung des Algorithmus auf Mikcorocontroller" Erik B. schrieb: > ich habe überhaupt noch keine Idee davon. Wie schon erwähnt wurde, ist die "Realisierung" auf einem PC, auf einem Tablet oder auf einem Mikcocontroller als Ziel-System ein ziemlich entfernter, nebensächlicher Punkt. Zuerst musst du deinen Algorithmus "definieren", bevor du ihn "realisierst". Wichtig ist, dass du die wesentliche Struktur (d)eines Algorithmus schon mal skizziert hast. Ob diese Definition in einer Art deutsch-englische Metasprache, in C oder in klingonisch erfolgt, ist erst mal uninteressant. Was halt für dich am komfortabelsten ist. Wie weit bist du denn in der Definition des Algorithmus? Zeig doch mal was du schon hast. Und was genau fehlt dir an Informationen in der Realisierung speziell auf einem MC? Toolchain? Ein/Ausgabe?
Wegstaben V. schrieb: > oder in klingonisch hm, ich hab grad mal den Klingonisch-Übersetzer bemüht. Ich bin mir nicht mehr ganz sicher mit meinen Vorschlag zur Sprachwahl. Aber für jemanden der klingonisch flüssig sprechen/lesen kann ist es bestimmt einfach ;-) https://www.translator.eu/deutsch/klingonisch/ubersetzung/ Metasprache: ------------- wiederhole drucke aktuelles Datum und Uhrzeit pause 10 Sekunden bis eine Taste gedrückt wird klingonisch: ------------ nuqDaq jIHaw'? mInDu'wIj HomvaD je bIjatlh, ja'chuq ghopDu' Übungs-Aufgabe für Erik B: Warum ist die "Implementation" der Pause in oben genannten Algorithmus ungünstig? PS: Die Rückübersetzung des Klingonischen Text ins Deutsche über selbe Übersetzungs-Seite lässt mich etwas rätseln: Rezept Und sollen meine Augen liebenswert und würdig sein, diskutieren Hände
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.