Hallo zusammen, mein erster Beitrag hier, also bitte nachsichtig sein, wenn die Rubrik nicht passt oder ich die passenden "Zauberworte" für die Suche nicht gefunden habe. Und bitte laaaangsam mit mir sprechen, mein ganzen E-Technik-Kenntnisse sind Schulwissen bzw. bissl angelesen. Also, was hab ich vor? Ich möchte bei LEGO-Loks (bzw. bei Zügen von Alternativherstellern wie BlueBrixx, ist hier aber nicht wichtig) Beleuchtung nachrüsten. Diese soll insbesondere die Fahrtrichtung beachten, also vorn weiß, hinten rot und bei Fahrtrichtungswechsel natürlich umgekehrt. Und die Ansteuerung soll wie bei LEGO-Powerfunctions bleiben, ich will das einfach genau so anstecken wie die Motoren auch. Und die Elektronik soll in der Lego-Lok Platz finden, also möglichst kleine Baugröße. SMD bekomme ich schon irgendwie hin. Wie funktioniert die Ansteuerung? Das LEGO-Powerfunctions-System wurde u.a. hier Beitrag "Lego Power Functions Pinbelegung und genaue Funktion der Pins unklar" auch schon mal erörtert, ich fasse das mal kurz zusammen: Die Stecker sind vierpolig: - Pin1: GND - Pin2: Signal 1 - Pin3: Signal 2 - Pin4: 9V Für normale Fahrtansteuerung in die eine Richtung bleibt Pin3 auf 0V, auf Pin2 wird die Spannung in kleinen Stufen von 0 auf 9V angehoben. Für Rückwärtsfahrt beleibt Pin2 auf 0V und Pin 3 wird von 0 auf 9V geregelt. Die Motoren werden lediglich an Pin2 und Pin3 gehangen, GND und Pin4 werden nicht beachtet. Idee 1: Man könnte das LED-Licht einfach über nen Vorwiderstand zwischen Pin2 (bzw. Pin3) und GND hängen. Problem: bei Langsamfahrt (Spannung deutlich unter 9V) ist das dunkler als bei schneller Fahrt. Idee 2 (die ich auch umgesetzt habe): Wenn ich zwischen Pin1 und Pin4 schon ne konstante Spannung habe, dann kann ich die LEDs (mit Vorwiderständen) ja dazwischen hängen und über einen Transistor schalten, dessen Basis (über einen Widerstand) an Pin2 bzw. Pin3 gelegt wird. Funktioniert soweit im Stand, da kann ich Vor- und Rückwärtsfahrt simulieren. :) Problem: Wenn ich einen Motor dazuschalte, leuchten auf einmal sowohl Vorder- als auch Rücklicht gleichzeitig. :( Ich hab dann mal mit meinem einfachen Multimeter nachgemessen. Die Motoren induzieren eine Spannung auf dem Pol, der theoretisch GND-Potential haben sollte. Bei schneller Fahrt ist diese induzierte Spannung geringer, klemmt man mehrere Motoren an, steigt sie. Zur Zeitabhängigkeit kann ich nix sagen, aber das Multimeter misst so zwischen 0,8V bis 2,7 V (je nach Fahrtstufe und Anzahl der angeklemmten Motoren) zu GND. Was gibt es für Möglichkeiten, dass bei Vorwärtsfahrt das Rücklicht nicht angeht? Ich bin bei meiner Suche über Operationsverstärker gestolpert. Gehe ich recht in der Annahme, dass es z.B. ein LM741 tun sollte, wenn ich an V+ (Pin7) die 9V lege, an V- (Pin4) lege ich GND an und an + und - (Pin 3 und 4) klemme ich einfach Pin2 und Pin3 der Powerfunctions an und dann kann ich am Output vom LM741 (Pin6) je nach Polarität der Eingangssignale dann 9V bzw. 0V abgreifen und dahinter die LEDs mit Vorwiderstand packen? (Komparator, wenn ich das richtig verstanden habe) Funktioniert das? Gibts elegantere Lösungen, mit irgendwelchen Kondensatoren oder zwischengeschalteten Dioden, die die induzierte Spannung vernichten? Vielen Dank für eure Hilfe
...vll. so wie bei einer digitalen Modellbahn (DCC)?
GND-led-vorwiderstand-elko 100uf nach gnd-K diode A-signal damit ist die helligkeit konstant. die
Vielleicht bis zu vier Dioden in die Basisleitung einschleifen oder eine Z-Diode mit 3-4V.
none schrieb: > ...vll. so wie bei einer digitalen Modellbahn (DCC)? Verstehe ich leider nicht. Vielleicht noch mal zum Verständnis: Beim Powerfunctions-System sind die Schienen nicht stromleitend, die Loks werden über eine Akkubox angesteuert. Deren Ausgänge habe ich beschrieben.
Hubert G. schrieb: > Vielleicht bis zu vier Dioden in die Basisleitung einschleifen oder eine > Z-Diode mit 3-4V. Genau diese Idee hatte ich auch schon - nur ist so eine Diodenkaskade schon ein merkwüridges Konstrukt. Aber Zener-Diode mit 3,3V gibts bei Reichelt für 4ct, das ist wirklich nen Versuch wert.
Versuche es vorher mit vier Dioden. Der Effekt sollte der gleiche sein.
Flip B. schrieb: > GND-led-vorwiderstand-elko 100uf nach gnd-K diode A-signal Hallo Filip, klingt interessant. Hab ich nur leider von der Ausführung, als auch von der Funktionsweise her nicht alles komplett verstanden. Aber deine Erklärung ist so ähnlich wie die Schaltung, die ich bei der LEGO-Powerfunctions-Beleuchtung fand: (mit (A1) und (A2) bezeichne ich Verzweigungspunkte) GND - LED - (A1) - Vorwiderstand - (A2) - Diode - "Signal A von Powerfunctions" außerdem noch (A1) - Kondensator - GND und (A2) - Signal B von Powerfunctions Das ergibt Dauerlicht, sobald Signal A oder Signal B anliegen, wenn man den Abzweig von (A2) weglässt, sicher nur Licht wenn Signal A anliegt. Dazu eine Beobachtung und eine Frage: (1) Das Licht ist zumindest bei der LEGO-Beleuchtung hier vor mir nicht konstant, sondern nimmt schon mit steigender Geschwindigkeit zu. Nicht krass, aber merklich. (2) Was bewirkt denn überhaupt der Kondensator, wie funktioniert das?
Angehängte Dateien:
-

20211118_215110.jpg
230 KB
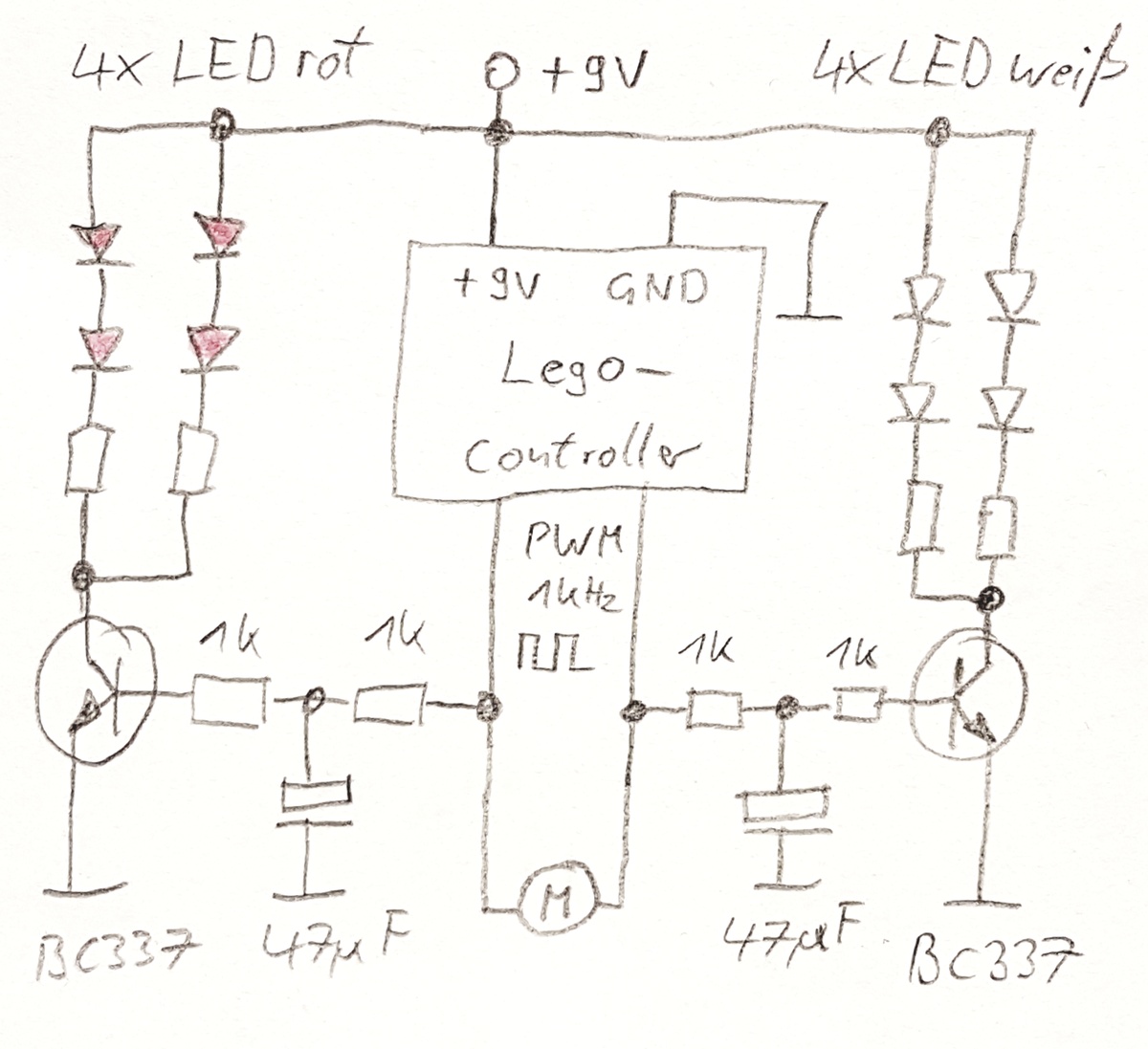
Samuel L. schrieb: > Was bewirkt denn überhaupt der Kondensator, wie funktioniert das? Der Kondensator bewirkt mit dem Widerstand einen Tiefpass und glättet das 1kHz PWM-Signal. Das Flackern verschwindet. Bei der Lego-Lok kann die Geschwindigkeit über PWM in 8 Stufen zu je 12,5% eingestellt werden. Bei einer 9V Versorgungsspannung entspricht die kleinste Fahrstufe einem arithmetischen Mittelwert von 1,125V. Mit den beiden Transistoren BC337 können je nach Fahrtrichtung die entsprechenden LEDs angesteuert werden. Ich habe versehentlich 4 rote LEDs auf eine Seite gezeichnet. Es müssen natürlich pro Transistor je zwei rote und zwei weiße LEDs angesteuert werden.
Hallo Michael, vielen Dank für die ausführliche Beschreibung und den Schaltplan! Das mit den LED-Farben war mir auch schon aufgefallen. :D Nur damit ich es richtig verstanden habe: Die Tiefpass-Filterung ist nicht dafür gedacht das angelegte PWM-Signal selbst zu modifizieren, sondern vor allem um die durch die Motoren rückinduzierte Wechselspannung weg zu bekommen, die das PWM-Signal überlagert, richtig? Ich hab halt keinen Oszi und kann nur raten, was da auf der Zeitachse eigentlich passiert.
Ich denke sie dienen dazu, die PWM Impulse zu ein/aus Signalen zu formen damit die LEDs nicht im Takt der PWM flackern.
Also schon so wie von Michael formuliert das PWM-Signal auf ein konstantes Level glätten? Die Schaltung von Michael habe ich fast genau so ja schon umgesetzt, nur ohne die Kondensatoren nach GND. Ich habe noch ne einfache Diode vor die Basis-Eingänge der Transistoren gehangen, um da noch nen kleinen Spannungsdrop zu haben. Und das funktioniert schon genau so wie es soll, solange ich keinen Motor anschließe. Sobald aber der Motor angeklemmt wird, leuchtet alles, unabhängig von der Fahrtrichtung. Ergo muss der Motor da irgendeinen rückkoppelnden Einfluss haben (den ich mit dem Multimeter als Potentialunterschied zu GND ja auch messen kann).
Offenbar ist die Ausgangsspannung des Motorteibers beim LOW Pegel nicht niedrig genug. Probiere mal zusätzliche Widerstande mit 1kΩ jeweils von der Basis zum Emitter der beiden Transistoren. Ohne Kondensatoren hast du keine Glättung, dann kannst du LED's auch direkt parallel zum Motor schalten (ohne Transistoren).
Stefan ⛄ F. schrieb: > Offenbar ist die Ausgangsspannung des Motorteibers beim LOW Pegel nicht > niedrig genug. Probiere mal zusätzliche Widerstande mit 1kΩ jeweils von > der Basis zum Emitter der beiden Transistoren. Mit Motortreiber meinst du die Elektronik, die im Lego-Controller steckt, oder? Das stimmt, da kann ich mit dem Multimeter auch im Aus-Zustand etwa 0,5V Spannungsdifferenz zu GND messen. Daher hatte ich auch die angesprochene Diode noch dazwischen gesetzt. Wo ich jetzt noch mal damit gespielt habe, merke ich allerdings, dass die Durchbruchsspannung der LED da nicht ganz ausreichend ist. Insbesondere die roten LEDs glimmen auch schon leicht im ausgeschalteten Zustand. Du meintest ich solle Basis und Emitter der Transistoren mit 1kΩ brücken? Weil ichs nur so da hatte, hab ich das mit 700Ω (und 1,3kΩ) probiert. Das ungewünschte Leuchten verschwindet dabei (fast), allerdings verschwindet es auch bei der Vorwärtsfahrt, sprich das bleibt auch dann finster, wo es eigentlich leuchten soll. 5,35kΩ hab ich auch noch probiert, damit bekommt man das falsche Leuchten nicht mehr weg. > Ohne Kondensatoren hast du keine Glättung, dann kannst du LED's auch > direkt parallel zum Motor schalten (ohne Transistoren). Du meinst weil das ein PWM-Signal ist, würde die LED-Helligkeit hinter dem Transistor auch schaltstufenabhängig geregelt sein? Das überzeugt mich theoretisch, allerdings ist bei meiner transistorgesteuerten Schaltung ohne angeschlossenen Motor wirklich gar keine Helligkeitsabhängigkeit der LEDs von der Schaltstufe erkennbar. Könnte es sein, dass der Lego-Controller gar kein PWM-, sondern bereits ein geglättetes Signal bereit stellt? (Ich nutze übrigens gar keinen Lego-Controller, sondern eine Akkubox eines alternativen Herstellers).
Offenbar klappt es nicht so einfach. War ein netter Versuch. Um das jetzt richtig anzugehen müsste man mit einem Oszilloskop nachmessen, welche Signale/Spannungen da nun wirklich heraus kommen und dann genau dazu passend etwas bauen. Wenn du so weit gehen willst, besorge dir ein Oszilloskop. So ein billiges DSO-150 müsste schon reichen.
Ich hab noch nen Raspberry hier liegen und mir heute bei Reichelt einen Bausatz u.a. mit Oszilloskop gekauft. :) Was ich auf jeden Fall noch mal probiere, ist das mit den vier Dioden/der Zener-Diode. Und Operationsverstärker habe ich auch mal in den Warenkorb gepackt. Ich halte euch auf dem Laufenden, was raus kommt.
Mein Ansatz wäre, zwei Optokoppler antiparallel an den Motor zu klemmen - damit hätte ich schon mal die Fahrtrichtung. Jetzt muß man noch deren beide Ausgänge gegen die statischen 9V verknuddeln und damit die LEDs schalten.
Angehängte Dateien:
-

PowerFctFahrlicht.jpg
110 KB
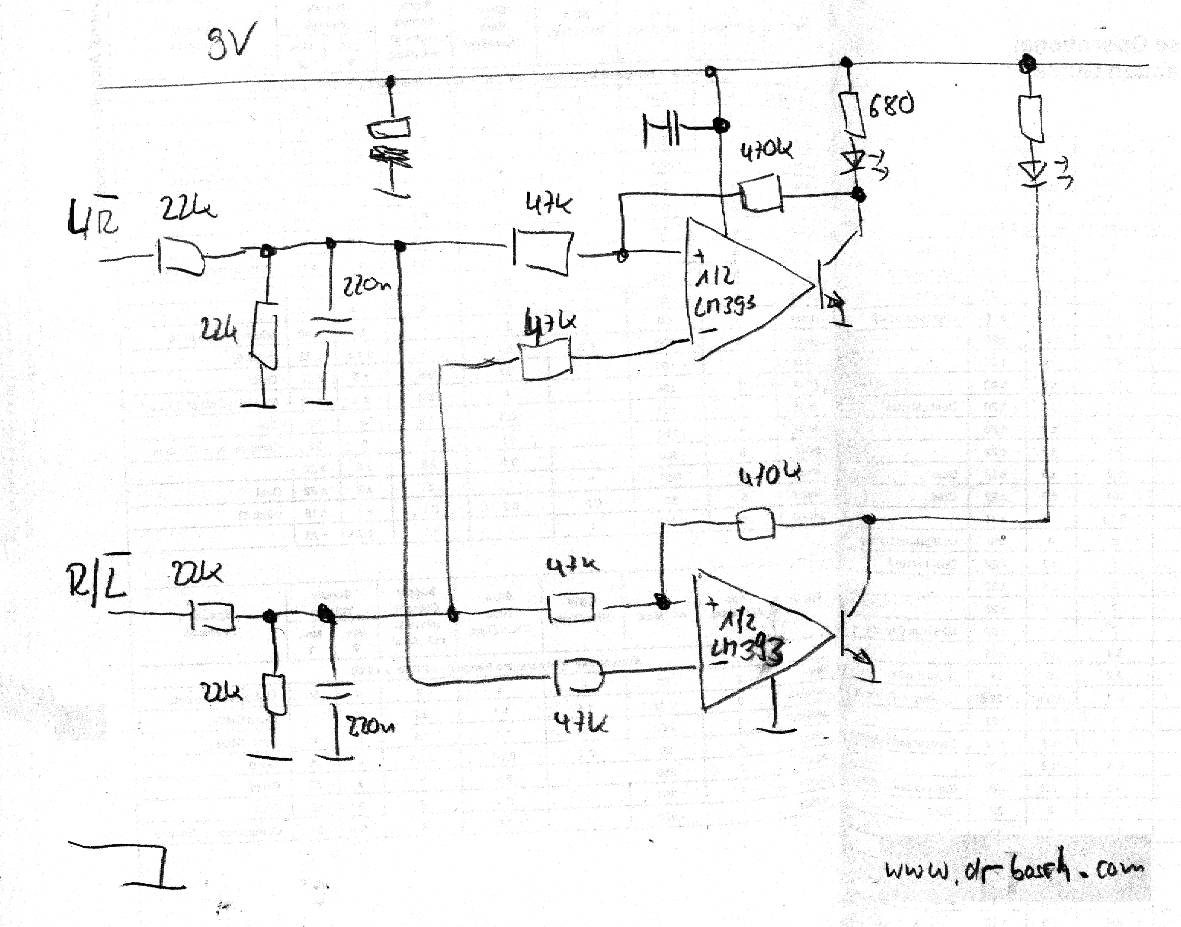
Samuel L. schrieb: > Ich bin bei meiner Suche über Operationsverstärker gestolpert. (...) > (Komparator, wenn ich das richtig verstanden habe) > Gibts elegantere Lösungen, mit irgendwelchen Kondensatoren oder > zwischengeschalteten Dioden, die die induzierte Spannung vernichten? Im Anhang mein (ungetesteter) Schaltungsvorschlag mit einem Dual-Comparator, wie z.B. LM393. Beachte, dass der Open-Collector-Ausgang (in der Skizze durch den NPN-Transistor angedeutet) max. 20mA aufnehmen kann. Die Bauteilwerte sind nur als Vorschlag zu verstehen. Falls beide LEDs in bestimmten Fahrstufen gleichzeitig leuchten oder die Helligkeit von der Drehzahl abhängt, die Kondensatoren an den Spannungsteilern vergrößern oder die Mittkopplungswiderstände (470k) verkleinern. Viel Spaß beim Basteln! Grüßle Volker
Angehängte Dateien:
-

20211120_115955.jpg
200 KB
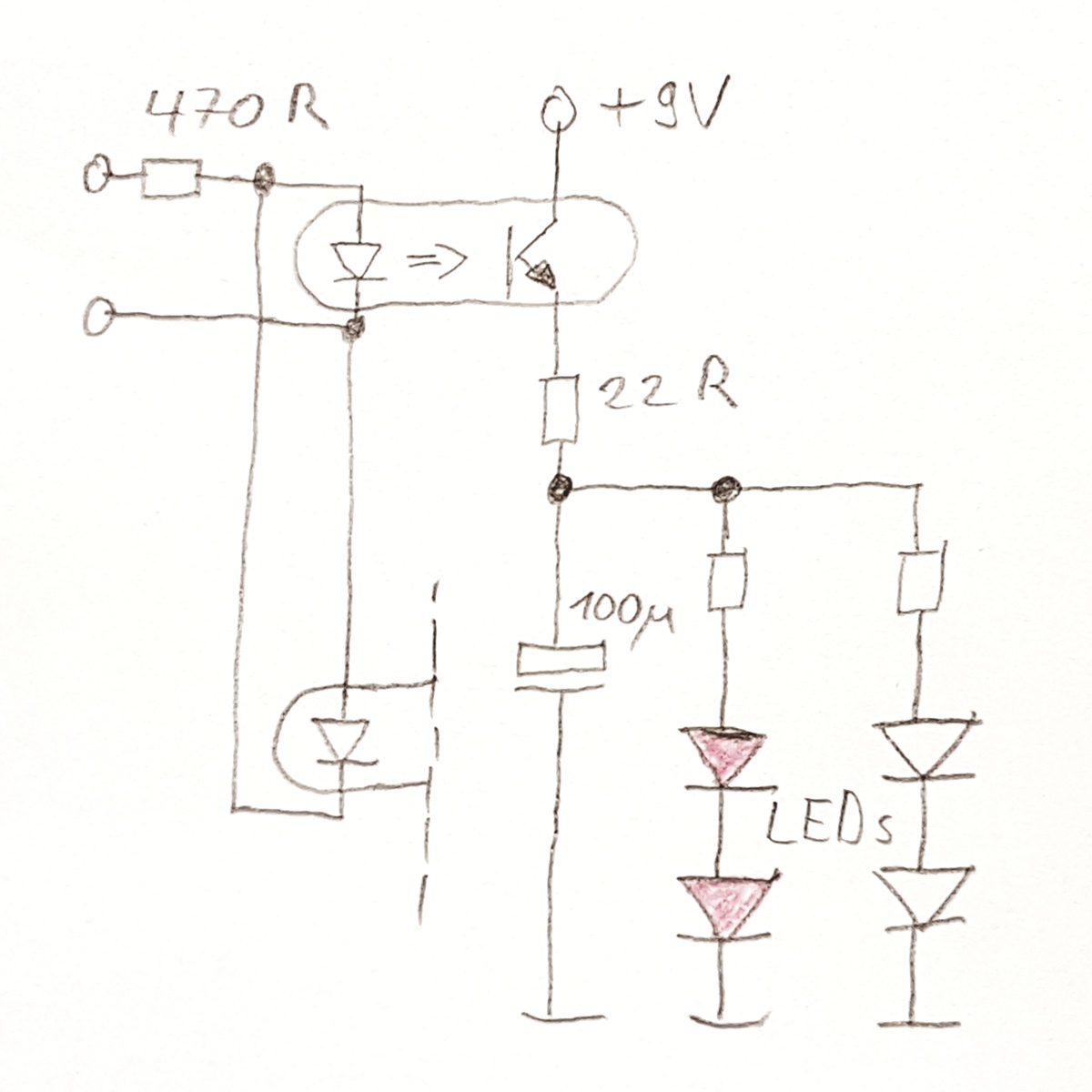
Manfred schrieb: > Mein Ansatz wäre, zwei Optokoppler antiparallel an den Motor zu klemmen. Die Idee gefällt mir auch gut. Damit entfallen sowohl die OPVs als auch die Transistoren. Hier ist nur ein Kanal gezeichnet, weil der andere Kanal identisch ist.
22Ω ergeben 200mA an roten LEDs. Ich denke das ist zu viel. So viel Strom wird aber wohl nicht fließen, weil Eingangsseitig ja nur 16mA fließen. Ich fürchte, dass die Helligkeit der LED in dieser Schaltung wieder stark von der Geschwindigkeit abhängt, weil die Optkoppler nur Impulsweise einschalten. Ich würde vielleicht noch einen Transistor in Darlington-Schaltung hinter den Optokoppler packen.
Wenn wie oben geschrieben mit Motor beide Leds leuchten, dann werden auch beide Optokoppler schalten. Die OP- Schaltung ist auch nicht mehr aufwand und funktioniert wahrscheinlich wenn die Hysterese richtig geschaltet ist.
Hubert G. schrieb: > Wenn wie oben geschrieben mit Motor beide Leds leuchten, dann werden > auch beide Optokoppler schalten. Das kann nicht sein, dann würde sich der Motor nicht drehen. Der Fehler in obiger Schaltung war: Sie gin davon aus, dass immer nur ein Pin positiv gepulst wird, während der andere auf LOW < 0,5V verbleibt und dass im Ruhezustand beide Pins auf LOW liegen. Hätte so sein können, ist es aber nicht. Durch die Betrachtung der beiden Spannungen relativ zueinander umgeht man das Problem.
Wenn die OK parallel zum Motor sind wird das Problem der geschwindigkeitsabhängigen Helligkeit der Leds gleich bleiben.
Vielleicht doch besser einen ATtiny, Spannungsregler und ein paar Widerstände verwenden.
Stefan ⛄ F. schrieb: > 22Ω ergeben 200mA an roten LEDs. Ich denke das ist zu viel. Das ist eindeutig zuviel, deswegen sind vor den LEDs jeweils noch entsprechende Widerstände davorgeschaltet (z.B. 220R). Der Optokopplertransistor wirkt hier wie eine Diode bei einem Spitzenwertdetektor. Der 100uF Elko wird über 22R schnell geladen, kann sich danach aber nur langsam über die LEDs und Vorwiderstände entladen. Ein Entladen zurück auf die 9V Versorgungsleitung geht nicht mehr.
Michael M. schrieb: > deswegen sind vor den LEDs jeweils noch > entsprechende Widerstände davorgeschaltet Ach ja, die hätte ich in die Rechnung mit einbeziehen sollen. Michael M. schrieb: > Der 100uF Elko wird über 22R schnell geladen Nur wenn der Optokoppler einen entsprechend hohen Verstärkungsfaktor hat. Auf "normale" Optokoppler wie den PC817 trifft das nicht zu.
Samuel L. schrieb: > ... Ich halte euch auf dem Laufenden, was raus kommt. Guten Abend, wurde das Projekt beendet? Wie sieht der letztendliche Schaltplan aus? Möchte gerade das gleiche realisieren.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.