Hi, für ein Modellbauprojekt (nicht meins, unterstützte nur) muss ich folgende Dinge implementieren. Ich brauche einen mechanischen Aufbau mit dessen Hilfe ich mit einem Motor und Zubehör einen Drehwinkel im Bereich -90° und +90° stufenlos (stufenlos = 0,1° genau bzw. Auflösung) einstellen kann. Der Winkel soll mit einer einstellbaren Geschwindigkeit angefahren werden können (0,5°/s - 90°/s). Während des Einstellen des Winkels soll das Drehmoment stöndig gemessen werden mit dem ich den Winkel einstellen muss. Ich möchte zum einen das aufgebrachte Drehmoment wissen und das Verfahren des Winkel stoppen wenn ein zu hohes Drehmoment aufgebracht werden muss. Das Drehmoment soll in einem Bereich bis ca. 5 Nm mit einer Auflösung/Genauigkeit von 0,1 Nm. Ich möchte gerne mir dann eine Drehmoment Winkel Kurve aufzeigen lassen, später soll es dann selbstständig an Hand vom Drehmoment und Winkelvorgabe entsprechend einstellen. Die mechanischen Abmessungen des Systems/Motor können ca. 50x50x200 mm sein. Im ersten Schritt um den Aufwand gering zu halten, könnte ich mir eine "fertige" Lösung in Form von Hardware/Mechanik vorstellen, d.h. ich wäre da auch bereit 300-400 € zu investieren. Wenn das dann so funktioniert, würde ich auch ein Wenig mehr Zeit reinstecken können und einen selbstgebastelten Aufbau zu erstellen (wenn das billiger wird). - Welche Art von Motor eignet sich sowas? - Gibts da integrierte Lösungen wo Drehmoment und Winkel im Motor messen können? - Gibt sowas auch was fertiges als Servo? Ich bin mechanisch eine Vollpfeife, aber hab schon viele C/C++ programmiert. Wenn mir Sensoren entsprechend die Eingabedaten (Drehmoment und Ist-Winkel) zur Verfügung stellen, könnte ich die Regelung selbstständig programmieren.
Die Regelung ist am einfachsten mit einem DC-Motor zu implementieren.bei 5NM und einem Bauraum einer mit einem (Planeten-) Getriebe vorne Drauf. Dann ein Drehmomentsensor für Wellenmontage und ganz vorne (nicht hinten beim Motor) den Encoder. Der Rest ist easy.
In einem Gleichstrommotor (permanent- oder fremderregt) ist das Drehmoment in weiten Grenzen proportional zum Ankerstrom. Die Sollbeschreibung liest sich wie die Beschreibung eines Servos, das es durchaus bis 5Nm gibt. Allerdings sind - wie so oft - die Genauigkeitsanforderungen eher praxisfern. 0,1° bei 180° Gesamtwinkel sind 1/1800 = 0,55 %, das ist mit Basteln schon schwierig. Mir ist kein Standardservo mit einstellbarer Geschwindigkeit bekannt, das muss aber nichts heissen, bin seit vielen Jahren nicht mehr modellbauerisch aktiv.
Malte schrieb: > mit dessen Hilfe ich mit einem Motor und Zubehör einen Drehwinkel im > Bereich -90° und +90° stufenlos (stufenlos = 0,1° genau bzw. Auflösung) > einstellen kann. Der Winkel soll mit einer einstellbaren Geschwindigkeit > angefahren werden können (0,5°/s - 90°/s). Schrittmotor mit 1:18 Zahnriemenuntersetzung, Abtriebsleistung und Haltemoment >5Nm Malte schrieb: > Das Drehmoment soll in einem Bereich bis ca. 5 Nm mit einer > Auflösung/Genauigkeit von 0,1 Nm. Teuer https://www.distrelec.de/de/drehmomentsensor-bidirektional-nm-ncte-2200-5nm/p/13759841
0,1° bei 180° Gesamtwinkel sind 0,055%. Das sind Größenordnungen, wo ich nicht mehr im Bereich Modellbau suche. Bei solchen Anforderungen schaue ich dann doch eher bei den industriellen Anbietern, die Motor und Ansteuerung aufeinander abgestimmt anbieten. Das sind dann Faulhaber, Groschopp, Dunkermotoren, Maxon und andere oder auch bei Firmen, die Automatisierungslösungen anbieten. Preislich aber 4-stellig und somit deutlich über den 400€ Budget. Bei 0,1° Winkelgenauigkeit ist auch schon ein eingeschränktes Getriebespiel nötig um die entsprechende Wiederholgenauigkeit bei verschiedenen Belastungsrichtungen zu erhalten, was sich zusätzlich auf den Preis auswirkt (Harmonic Drives sind spielfrei, kosten leider und die Anzahl der Hersteller ist klein). und 2% Drehmomentauflösung ist auch nicht ohne. Für mich geht das dann auch schon in Richtung Drehmomentenmesswelle - leider auch im gehobenen Preissegment zu finden. Ich empfehle hier, noch mal einen Schritt zurück zu gehen und zu schauen, ob diese Genauigkeiten und die Flexibilität in der Geschwindigkeit wirklich benötigt werden und erstmal mit einem hochwertigen digitalen Modellbauservo zu beginnen (eher Futaba als Graupner, es gibt welche, denen man den Soll-Winkel digital mitteilen kann und nicht auf die PWM angewiesen ist). Wenn das nachweislich nicht reicht, dann erst die höherwertigen Optionen angehen. Mario P.
Servus, wie wärs mit nem guten Modellbau Servo?: https://www.multiplex-rc.de/produkte/116845-servo-d845wp Die können z. T. bis 10 Nm und haben einiges an Funktionen, u. a. einen Überlastschutz und sind programmierbar...vll. könnte man den irgendwie für die Drehmomentbegrenzung nutzen. Alternativ würde ich den Strom messen...der ist proportional zum Drehmoment. Ansonsten vll. so ein Servo (schrittmotor würd ich eher nicht nehmen) mit Zahnrirmenuntersetzung: https://www.sorotec.de/shop/JMC-Servo-Motor-mit-integriertem-Servotreiber-180-Watt---36-Volt---3000-1-min.html?language=de Und weil das harmonic drive getriebe schon angesprochen wurde (statt zahnriemen z. B.), die bekommt man auch bezahlbar: https://www.ebay.de/itm/284402327203?chn=ps&norover=1&mkevt=1&mkrid=707-134425-41852-0&mkcid=2&itemid=284402327203&targetid=1267673318787&device=m&mktype=pla&googleloc=20229&poi=&campaignid=10203814929&mkgroupid=121018582783&rlsatarget=pla-1267673318787&abcId=1145991&merchantid=110011964&wbraid=CjgKCAiA9aKQBhBnEigAU5U2WP22tqhCi6YO0QbJCzkZ2TBxhHVWJ9v36AmP4jZ7ZzyDEKp6GgIj6w
Vielen Dank für die Antworten. Mario P. schrieb: > Ich empfehle hier, noch mal einen Schritt zurück zu gehen und zu > schauen, ob diese Genauigkeiten und die Flexibilität in der > Geschwindigkeit wirklich benötigt werden und erstmal mit einem > hochwertigen digitalen Modellbauservo zu beginnen (eher Futaba als > Graupner, es gibt welche, denen man den Soll-Winkel digital mitteilen > kann und nicht auf die PWM angewiesen ist). Wenn das nachweislich nicht > reicht, dann erst die höherwertigen Optionen angehen. Wie ich schon geschrieben habe, bin ich mechanisch ein Vollpfosten... Aber ich glaube das wird die richtige Vorgehensweise sein, sich nochmal über die Anforderungen Gedanken zu machen. MaWin schrieb: > Teuer > https://www.distrelec.de/de/drehmomentsensor-bidirektional-nm-ncte-2200-5nm/p/13759841 Wenn ich die Preise für Drehmomentsensoren mir so anschaue in der Genauigkeitsklasse, da wird es mir ja schwindelig. Ich hab bei vielen Herstellern jetzt keine Preise gefunden, aber wird das nur ansatzweise günstiger wenn man von der Genauigkeit Abstriche macht (z.B. 0,5 Nm) oder bleibt da nur die Möglichkeit über den Strom zu messen?
Man könnte vll auch folgendes versuchen: Eine möglichst starr an den Motor gekoppelte Stahlwelle mit definiertem Querschnitt und Einschnürung als Drehfederelement. Am Antrieb und Abtrieb der Welle ein Drehencoder. Die Winkeldifferenz ist dann proportional zum Drehmoment, solange du dich im elastischen Bereich der Drehfeder bewegst. Auflösung ist dann abhängig von der Auflösung der Drehencoder und der Elastizität (Durchmesser) der Welle. Je elastischer die Welle, desto grösser die Auflösung...aber das hat seine Grenze...nämlich dann wenn der plastische bereich (bleibender Verformung) eintritt. Siehe wiki unter Berechnung: https://de.m.wikipedia.org/wiki/Drehstabfeder
Malte schrieb: > Wenn ich die Preise für Drehmomentsensoren mir so anschaue in der > Genauigkeitsklasse, da wird es mir ja schwindelig. Drehmoment-Messwellen sind teuer wie du festgestellt hast. Aber das kann man billiger lösen. Gibt hier einen älteren Thread, incl. meinem Senf dazu :-) Beitrag "Re: Drehmoment/Gewicht messen"
Hab hier mal was interessantes gefunden: https://www.magtrol.com/germany/product/torque-transducers/ In der Rubrik "Funktionsprinzipien" wird erklärt wie es funktioniert. Die messen das Drehmoment mittels zwei Spulen. Das Prinzip kannte ich bisher gar nicht. Das liest sich für mich so, als würde das so ähnlich funktionieren wie Schlupf bei einem Asynchronmotor...salopp ausgedrückt?! Ich kenne es so, dass auf einer Welle eine Whestonsche DMS-Brücke aufgeklebt ist, welche dann entweder über Schleifkontakte oder induktiv ausgelesen werden kann.
Malte schrieb: > oder bleibt da nur die Möglichkeit über den Strom zu messen? Viel zu ungenau. Und bei Schrittmotoren nicht möglich, die brauchen immer 'genug' Strom. Dehnungsmesstreifen sind genau. Man könnte über ungenauere Messmethoden nachdenken, wie federnde Verbindungen und dann den Drehwinkelessen aber das geht auf die Positioniergenauigkeit. Das kann man wiederum kompensieren (weiter fahren als nötig, damit die Achse den Sollwert erreicht) aber das macht die Sache nicht einfacher.
Angehängte Dateien:
-

Xqt_Regler.png
16 KB
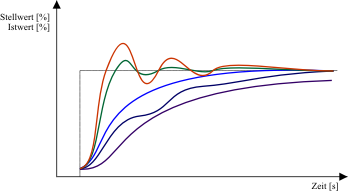
MaWin schrieb: > Das kann man wiederum kompensieren (weiter fahren als nötig, damit die > Achse den Sollwert erreicht) aber das macht die Sache nicht einfacher. Man weiß doch anhand dem einen Drehwinkelgebers, wie weit am Abtrieb gefahren wurde, also man kennt somit die Position am Abtrieb...und über den Winkelunterschied der beiden Drehgeber erhält man dann das Moment. Bei einem full-closed-loop CNC System mit Servomotor (mit integriertem Drehwinkelgeber) und Glasmassstab als Achsenreferenz funktionierts doch genauso...irgendwo hat man immer Elastizitäten die man ausregeln muss. Die Sprungantwort der Regelung darf eben keine Überschwinger haben...also blaue Kurve.
An meinen Roboter (7 Freiheitsgrade) habe ich das mit eisenlosen Glockenanker-Getriebemotoren von Maxxon in Verbindung mit Servopotis gelöst. Die Servopotis haben die Position vorgegeben, und über den Motorstrom wurden die Kräfte gemessen. Der Roboter konnte vom rohen Ei bis zur Sektflasche auf einem Radius von 65cm alles handhaben. Er konnte innen oder aussen greifen. Analogrechner haben für die Sicherheit gesorgt. 1982 war das noch üblich.
el. Servolenkung ist kräftemäßig zu groß, aber bringt evtl. Ideen
Wenn man halt wieder wüsste was damit gemacht werden soll...könnte man vll. auch bessere Tipps geben...aber es ist wieder mal "geheimnissvoll" ;-)
Hallo MaWin, MaWin schrieb: > Malte schrieb: >> oder bleibt da nur die Möglichkeit über den Strom zu messen? > > Viel zu ungenau. > > Und bei Schrittmotoren nicht möglich, die brauchen immer 'genug' Strom. Unsinn, auch Schrittmotoren gibt es mit Encoder und im Closed-Loop Betrieb. Dann kann man auch über den Strom das Drehmoment messen. Das Rastmoment des Motors begrenzt aber die Genauigkeit, Messgenauigkeiten <5% würde ich da nicht erwarten. Mit freundlichen Grüßen Thorsten Ostermann
Thorsten O. schrieb: > Messgenauigkeiten <5% würde ich da nicht erwarten. Dann würde diese Möglichkeit wegfallen (laut Anforderungen des TO). Das sprach auch schon Mario an: Mario P. schrieb: > 0,1° bei 180° Gesamtwinkel sind 0,055%.
Paul schrieb: > Dann würde diese Möglichkeit wegfallen (laut Anforderungen des TO). > Das sprach auch schon Mario an: Er meint die Messgenaugkeit des Drehmoments, nicht der Position. Aber um Drehmoment messen zu wollen statt einem Drehmomentsensor (den man übrigens auch an der Halterung des Motors anbringen könnte statt an der Welle) lieber eine closed loop Regelung mit höchstauflösendem Encoder einzusetzen weil der Motor es eben alleine nicht kann, ist reichlich widersinnig.
MaWin schrieb: > Er meint die Messgenaugkeit des Drehmoments, nicht der Position. Wenn er sagt: Malte schrieb: > einen Drehwinkel im Bereich -90° und +90° stufenlos > (stufenlos = 0,1° genau bzw. Auflösung) dann meint er mit "Drehwinkel" deiner Meinung nach das Drehmoment? ;-)
MaWin schrieb: >Paul schrieb: >> Dann würde diese Möglichkeit wegfallen (laut Anforderungen des TO). >> Das sprach auch schon Mario an: >Er meint die Messgenaugkeit des Drehmoments, nicht der Position. Ich hatte beides angegeben (hier zusammengefaßt): Drehwinkel: 0,1° bei 180° Gesamtwinkel sind 0,055%. Drehmoment: 0,1Nm bei 5Nm Maximalmoment sind 2% Für die Drehmomentermittlung ist der Verweis auf den Beitrag im Post Beitrag "Re: Drehmoment und Drehwinkel messen" eine deutlich günstigere Alternative, mit der durchaus auch die 2% Auflösung erreicht werden können. Schnelle Drehzahländerungen verfälschen allerdings etwas die Messung wegen der Masseträgheit und der Nachgiebigkeit des Systems aus Gestell, Motor, Getriebe, Hebelarm und Kraftmesszelle, können aber durch zuvor ermittelte Korrekturwerte in den Griff bekommen werden. Mario
Mario P. schrieb: Schnelle Drehzahländerungen verfälschen > allerdings etwas die Messung wegen der Masseträgheit und der > Nachgiebigkeit des Systems aus Gestell, Motor, Getriebe, Hebelarm und > Kraftmesszelle, können aber durch zuvor ermittelte Korrekturwerte in den > Griff bekommen werden. Das ist aber immer so...bei dem einen Aufbau mehr, beim anderen weniger. Elastizitäten, Spiele und Massenträgheiten gibts immer. U. a. deswegen gibts ja full-closed-loop Systeme, die sowas einfach...wie soll ich sagen..."ignorieren". Ein Inkrementalgeber oder was auch immer (egal ob rotatorisch oder translatorisch) an dem Teil, dass schlussendlich die benötigte Bewegung ausführt...den interessieren die ganzen Elastizitäten, etc. die davor auftreten nicht. Lediglich die Massenträgheiten und Reibung zieht sich natürlich durchs ganze System...und das steuert dann die Regelung hinsichtlich Position, Geschwindigkeit und Beschleunigung. Aber solange man nicht weiß, was damit wirklich gemacht werden soll...sind Tipps von low-tech bis high-tech dabei...
Mario P. schrieb: > Schnelle Drehzahländerungen verfälschen > allerdings etwas die Messung wegen der Masseträgheit und der > Nachgiebigkeit des Systems aus Gestell, Motor, Getriebe, Hebelarm und > Kraftmesszelle, Welche Nachgiebigkeit meinst du? Man baut das üblicherweise so stabil dass sich da nix bewegt. Es liegt nur die Abstützkraft des Drehmoments immer an der Kraftmessdose an. Das MTM hat ohne Bewegung somit auch keinen Einfluss.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.