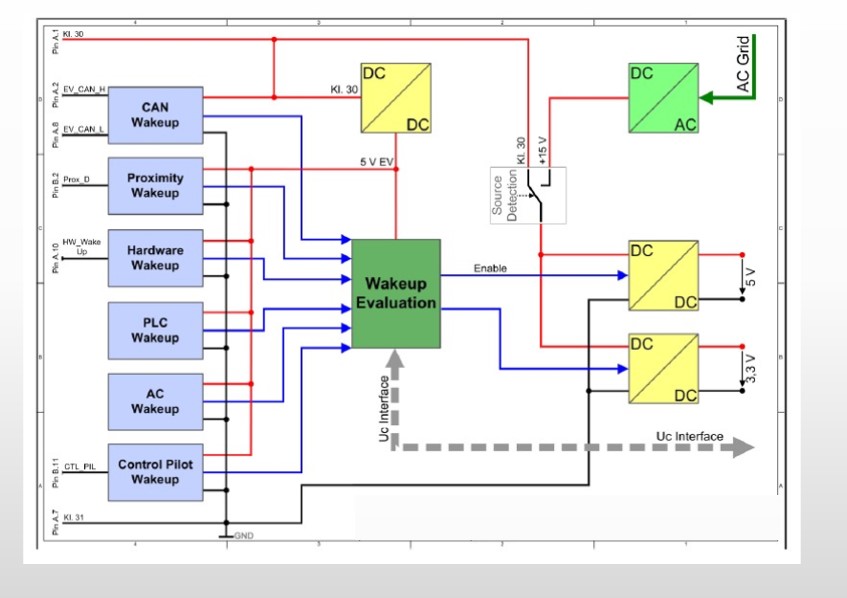
Hallo, ich habe ein Netzladegerät, der die Ladung eines Batteriesystems über CAN steuern muss. Das Ladegerät hat viele Wakeup-Mechanismen über welche das Gerät aufgeweckt werden kann. Das WakeUp über CAN weckt das Ladegerät auf, Sobald irgendeine Kommunikation am CAN-Bus läuft. Das WakeUp über Proximity funktioniert wie folgt: Sobald ein Ladekabel an die Ladedose des Fahrzeugs (Charge Coupler) angeschlossen wird, erkennt dies das Ladegerät am Proximity Widerstand und wacht auf. Das WakeUp über AC (Netzspannung) weckt das Ladegerät auf, sobald an den Kontakten des AC-Steckers Netzspannung anliegt. Und viele andere ... Ich muss eine Kommunikation von diesem Ladegerät zu einem Mikrocontrollern ermöglichen, um die Ladung des Batteriesystems über CAN zu steuern. Meine Frage ist es, was mit diesen Wakeup-Mechanismen gemeint ist. Was bedeutet es, das Ladegerät wird aufgeweckt? Wie kann ich diese Mechanismen zur Steuerung verstehen? Grüße E.
Angehängte Dateien:
xyz schrieb: > Was bedeutet es, das Ladegerät wird aufgeweckt? Nach deinem Plan hängt der grüne Block dauerhaft an KL30, wird also immer mit Strom versorgt. Das Gerät wird also inaktiv in einer Art Sleep-Mode oder Energiesparmodus sein. Wenn nun von Außen ein Signal eintrifft wird der Sleep-Mode beendet und irgendein Programm startet. > Wie kann ich diese Mechanismen zur Steuerung verstehen? Ein signal von extern an einen Pin des Mikrocontrollers kann beispielsweise einen Interrupt auslösen welcher den Sleep-Mode beendet. Oder ein interner Timer weckt den Controller in regelmäßigen Intervallen auf, der Controller prüft ob ein Signal vorhanden ist und falls nicht schläft er wieder ein.
Bitte melde dich an um einen Beitrag zu schreiben. Anmeldung ist kostenlos und dauert nur eine Minute.
Bestehender Account
Schon ein Account bei Google/GoogleMail? Keine Anmeldung erforderlich!
Mit Google-Account einloggen
Mit Google-Account einloggen
Noch kein Account? Hier anmelden.